Результат интеллектуальной деятельности: УСТРОЙСТВО ПЕЛЕНГАЦИИ И СОПРОВОЖДЕНИЯ С КОМПЕНСАЦИЕЙ ИСКАЖЕНИЙ ПЕЛЕНГАЦИОННОЙ ХАРАКТЕРИСТИКИ СИСТЕМЫ АНТЕННА-ОБТЕКАТЕЛЬ
Вид РИД
Изобретение
Изобретение относится к радиотехнике и может быть использовано в пеленгационных системах и системах сопровождения различных объектов.
Известно, что пеленгационная характеристика антенных систем является линейной только на ограниченном участке. Еще более сложный характер пеленгационная характеристика приобретает, если антенна укрыта радиопрозрачным обтекателем. Взаимодействие антенны с радиопрозрачным обтекателем в системе антенна-обтекатель (А-О) сопровождается смещением равносигнального направления и изменением крутизны пеленгационной характеристики, причем обе величины являются функциями угла отклонения оси антенны от оси обтекателя. Смещение равносигнального направления приводит к появлению пеленгационных ошибок при определении направления на объект [В.А. Каплун. Обтекатели антенн СВЧ (Радиотехнический расчет и проектирование). М.: Советское радио, 1974, стр. 6], а функциональная зависимость крутизны пеленгационной характеристики не позволяет в полной мере скомпенсировать пеленгационные ошибки в системах сопровождения, где кроме самой пеленгационной ошибки существенное влияние оказывают также производные пеленгационной характеристики второго и более высокого порядка.
Известно устройство для пеленгации и сопровождения целей, состоящее из многоканальной пеленгационной антенны, пеленгационного приемника и электромеханического привода пеленгационной антенны, в котором выходы пеленгационной антенны соединены с входами пеленгационного приемника, выходы которого соединены с входами электромеханического привода пеленгационной антенны, а выход электромеханического привода механически соединен с пеленгационной антенной, которая также механически соединена с датчиком углов поворота пеленгационной антенны [Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. М.: Советское радио, 1970, стр. 22]. Если антенна такого устройства укрыта радиопрозрачным обтекателем, то выдача целеуказания, а также сопровождение цели осуществляется с пеленгационной ошибкой, вносимой радиопрозрачным обтекателем.
Известно также устройство сопровождения с компенсацией пеленгационных ошибок системы антенна-обтекатель, принятое за прототип, содержащее последовательно соединенные пеленгационную антенну и пеленгационный приемник, электромеханический привод, выходы которого механически соединены с пеленгационной антенной, которая механически соединена с датчиком углов поворота пеленгационной антенны, устройство хранения узловых данных, вычислитель координат ближних узлов, вычислитель аппроксимирующих сплайнов, датчик текущих параметров сопровождения, причем выходы датчиков углов поворота пеленгационной антенны соединены с угломерными входами вычислителя координат ближних узлов и с угломерными входами вычислителя аппроксимирующих сплайнов, параметрические входы которого соединены с выходами датчика текущих параметров сопровождения, задающие выходы вычислителя аппроксимирующих сплайнов соединены с входам устройства хранения узловых данных, выходы которого подключены к входам вычислителя аппроксимирующих сплайнов, узловые выходы которого соединены с входами вычислителя координат ближних узлов, выходы которого соединены с входами координат ближних узлов вычислителя аппроксимирующих сплайнов, выходы которого соединены с входами поправок вычитающего устройства, входы которого соединены с выходами пеленгационного приемника, а выходы подключены к входам электромеханического привода [Описание изобретения к патенту RU 2284534 C1, 2005, G01S 13/00].
Одним из недостатков известных устройств пеленгации и сопровождения с компенсацией пеленгационных ошибок системы антенна-обтекатель является низкая точность компенсации, обусловленная тем, что пеленгационная характеристика системы А-О полагается линейной, а ее крутизна - равной крутизне пеленгационной характеристики антенны без обтекателя. Однако в общем случае на ее линейном участке искажения пеленгационной характеристики в системе А-О проявляются в следующем: во-первых, происходит смещение нуля пеленгационной характеристики и появление пеленгационной ошибки; во-вторых, меняется крутизна (наклон) ее линейного участка в процессе функционирования системы А-О; в-третьих, появляются нелинейные искажения пеленгационной характеристики более высокого порядка. Все эти искажения являются функциями углового положения обтекателя относительно антенны. В существующих устройствах компенсация искажений пеленгационной характеристики системы А-О осуществляется путем учета лишь смещения нуля пеленгационной характеристики, при этом изменения крутизны и нелинейные искажения пеленгационной характеристики в процессе функционирования системы А-О не учитываются, что приводит к погрешностям сопровождения.
Целью предлагаемого изобретения является повышение точности компенсации пеленгационных ошибок за счет учета искажений пеленгационной характеристики системы А-О в части изменений крутизны, а также нелинейных искажений пеленгационной характеристики системы А-О второго и более высокого порядка.
Указанная цель достигается за счет того, что в известное устройство пеленгации и сопровождения, содержащее последовательно соединенные пеленгационную антенну, пеленгационный приемник, электромеханический привод, выходы которого механически соединены с пеленгационной антенной, которая механически соединена с датчиком углов поворота пеленгационной антенны, устройство хранения узловых данных, вычислитель координат ближних узлов, вычислитель аппроксимирующих сплайнов, датчик текущих параметров сопровождения, причем выходы датчика углов поворота пеленгационной антенны соединены с угломерными входами вычислителя координат ближних узлов и с угломерными входами вычислителя аппроксимирующих сплайнов, параметрические входы которого соединены в выходами датчика текущих параметров сопровождения, задающие выходы вычислителя аппроксимирующих сплайнов соединены с входами устройства хранения узловых данных, выходы которого подключены к входам вычислителя аппроксимирующих сплайнов, узловые выходы которого соединены с входами вычислителя координат ближних узлов, выходы которого соединены с входами координат ближних узлов вычислителя аппроксимирующих сплайнов, дополнительно введено устройство решения уравнения компенсации, сигнальные входы которого подключены к выходам пеленгационного приемника, а выходы подключены к входам электромеханического привода, N входов коэффициентов пеленгационной характеристики устройства решения уравнения компенсации подключены к N выходам текущих значений коэффициентов пеленгационной характеристики вычислителя аппроксимирующих сплайнов, где N - количество коэффициентов разложения пеленгационной характеристики системы А-О, причем значение N выбирается равным N≥2.
На рис. 1 изображена блок-схема предлагаемого устройства, где:
1 - пеленгационная антенна;
2 - радиопрозрачный обтекатель;
3 - пеленгационный приемник;
4 - устройство решения уравнения компенсации;
5 - электромеханический привод;
6 - датчик углов поворота пеленгационной антенны;
7 - вычислитель координат ближних узлов;
8 - вычислитель аппроксимирующих сплайнов;
9 - устройство хранения узловых данных;
10 - датчик текущих параметров сопровождения.
Пеленгационная антенна 1 заключена в радиопрозрачный обтекатель 2. Выходы пеленгационной антенны 1 соединены с входами пеленгационного приемника 3, выходы которого соединены с сигнальными входами устройства решения уравнения компенсации 4, выходы которого соединены с входами электромеханического привода 5. Выходы электромеханического привода 5 механически соединены с пеленгационной антенной 1, которая также механически соединена с датчиком углов поворота 6. Выходы датчика углов поворота 6 соединены с угломерными входами вычислителя координат ближних узлов 7 и с угломерными входами вычислителя аппроксимирующих сплайнов 8, задающие выходы которого подключены к входам устройства хранения узловых данных 9, выходы которого соединены с входами вычислителя аппроксимирующих сплайнов 8. Выходы датчика текущих параметров сопровождения 10 соединены с параметрическими входами вычислителя аппроксимирующих сплайнов 8, N выходов коэффициентов пеленгационной характеристики вычислителя аппроксимирующих сплайнов соединены с N входами коэффициентов пеленгационной характеристики устройства решения уравнения компенсации 4.
Работает предлагаемое устройство следующим образом. Все поле возможных значений углов поворота пеленгационной антенны в обтекателе разбивается в выбранной системе координат (например, декартовой) на сектора. Точка в месте сопряжения смежных секторов называется узлом и определяется координатами узла. Каждому i-тому узлу соответствует семейство коэффициентов разложения пеленгационной характеристики системы А-О C0A-O, C1A-O, C2A-O, …, CnA-O, определяемых в соответствии с патентами [патент RU 2287834 С1, приоритет от 14.06.2005, G01R 29/10. Измеритель пеленгационных характеристик], [патент RU 2442181 С1, приоритет от 02.08.2010, G01R 29/10. Измеритель пеленгационных характеристик систем антенна-обтекатель]. Это семейство узловых данных для различных параметров сопровождения размещается в устройстве хранения узловых данных 9.
В процессе сопровождения из устройства хранения узловых данных 9 по запросу вычислителя аппроксимирующих сплайнов 8 извлекается семейство узловых данных и размещается в вычислителе аппроксимирующих сплайнов 8. Далее в вычислителе координат ближних узлов 7 в результате анализа текущей угломерной информации об углах поворота пеленгационной антенны подбираются ближние узловые точки (не менее 3-х точек), координаты которых расположены в непосредственной близости от текущих значений углов поворота пеленгационной антенны. Затем по узловым данным этих ближних точек в вычислителе аппроксимирующих сплайнов 8 формируются локальные сплайны (при 3-х узловых точках это плоскость) и вычисляются значения локальных сплайнов, соответствующие текущим значениям коэффициентов разложения пеленгационной характеристики C0A-O, C1A-O, C2A-O, …, CnA-O в зависимости от текущих значений углов поворота пеленгационной антенны α1 и α2. Алгоритм вычисления локальных сплайнов описан в [Голованов Н.Н. Геометрическое моделирование. - М.: Изд-во физико-математической литературы, 2002, стр. 81-87]. В результате вычисления локальных сплайнов определяются текущие значения N коэффициентов разложения пеленгационной характеристики C0A-O, C1A-O, C2A-O, …, CnA-O, которые используются затем в устройстве решения уравнения компенсации 4 для решения уравнения компенсации, имеющего вид:

где: βизм - аргумент в уравнении компенсации;
n - степень полинома.
В вычислителе аппроксимирующих сплайнов на основе узловых данных вычисляются текущие значения коэффициентов разложения пеленгационной характеристики C0A-O, C1A-O, C2A-O, …, CnA-O, соответствующие текущим параметрам: угловому положению пеленгационной антенны относительно обтекателя, частоте и поляризационным характеристикам падающей на систему А-О электромагнитной волны, температуре обтекателя и т.д.
Как видно, уравнение компенсации (1) содержит N коэффициентов разложения пеленгационной характеристики системы А-О, причем N=n+1, вычисляемых в вычислителе аппроксимирующих сплайнов 8, а также текущее значение сигнала βA-O (βист) с выхода пеленгационного приемника 3. В общем случае, поскольку пеленгационная характеристика задается полиномом n-й степени, решение данного уравнения может дать n значений корней, включая комплексные числа. Из физических соображений следует, что направлению на цель, измеренному системой А-О в устройстве сопровождения с компенсацией, будет соответствовать действительный корень βизм.К уравнения (1) с минимальным значением модуля.
Абсолютная погрешность определения направления на цель с учетом компенсации определяется как ε(β)изм.KN=βизм.KN-βист, где βизм.KN - направление на цель, измеренное устройством пеленгации и сопровождения с компенсацией, учитывающее N коэффициентов разложения пеленгационной характеристики, а βист - истинное направление на цель. Очевидно, что при увеличении количества N коэффициентов разложения пеленгационной характеристики системы А-О за счет более точного определения функции пеленгационной характеристики направление на цель определяется с учетом компенсации с меньшей погрешностью и ε(β)изм.KN→0 при N→∞. На практике значение N выбирают, исходя из требований к точности компенсации и имеющихся резервов долговременной памяти устройств хранения.
В частном случае при N=n+1=2 для решения уравнения компенсации используются данные о значении двух коэффициентов C0A-O и C1A-O, а коэффициенты CiA-O при i≥2 полагаются равными нулю. Отметим, что если коэффициент C0A-O характеризует смещение нуля пеленгационной характеристики, то коэффициент C1A-O учитывает изменения крутизны пеленгационной характеристики и тем самым позволяет реализовать в предлагаемом устройстве принципиально новый эффект повышения точности сопровождения. Дальнейшее увеличение значения N позволяет дополнительно увеличить точность сопровождения за счет учета искажений пеленгационной характеристики 2-го и более высокого порядка.
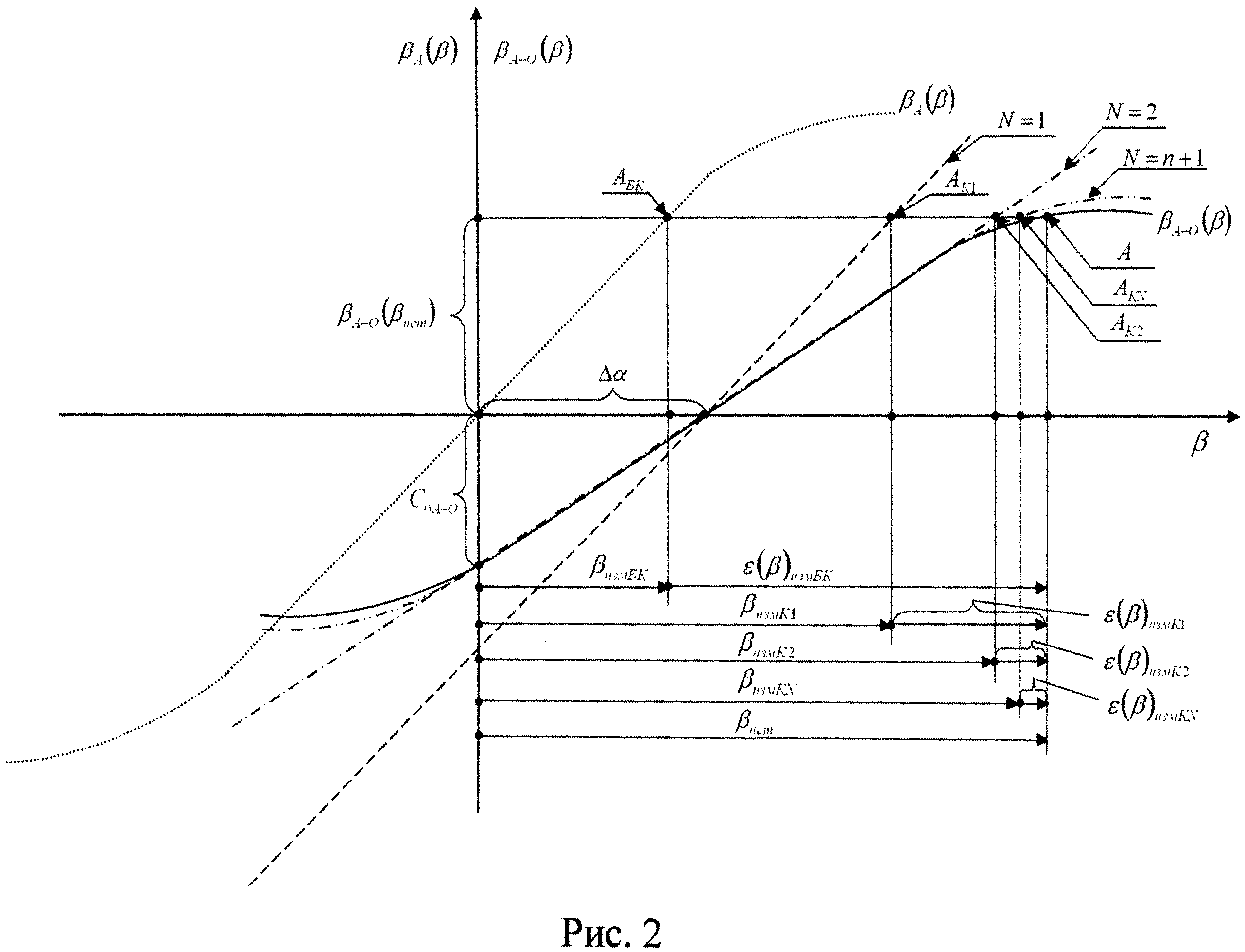
На рис. 2 наглядно иллюстрируется эффект повышения точности сопровождения и пеленгации за счет уменьшения абсолютной погрешности ε(β)изм.KN определения направления на цель с увеличением значения N. Там же для сравнения приведена абсолютная погрешность ε(β)изм.БК определения направления на цель без компенсации. Если цель находится в направлении βист относительно оптической оси антенны в отсутствие обтекателя (рис. 2), то при наличии обтекателя на выходе пеленгационного приемника без компенсации будет зафиксирован сигнал βA-O (βист), соответствующий точке А на реальной пеленгационной характеристике системы А-О βA-O (βист). Очевидно, что сигналу βA-O (βист) будет соответствовать точка АБК на пеленгационной характеристике βА (β) антенны в отсутствие обтекателя, и на выходе системы А-О будет зафиксировано значение βизмБК с абсолютной погрешностью ε(β)измБК. Этому же сигналу βA-O (βист) будет соответствовать точка АК1 на пеленгационной характеристике системы А-О для N=1 (рис. 2). Аналогично сигналу βA-O (βист) будет соответствовать точка АК2 на пеленгационной характеристике системы А-О для N=2 (рис. 2) и точка AKN на пеленгационной характеристике системы А-О для N=n+1 (рис. 2). На рис. 2 приведены также значения βизмKN для N=1, 2, (n+1), а также соответствующие им значения абсолютных погрешностей ε(β)измKN. Из рис. 2 видно, что при N≥2 учет изменений крутизны пеленгационной характеристики, а также учет искажений 2-го и более высокого порядка приводит к реализации принципиально нового качественного эффекта в части уменьшения погрешностей пеленгации и сопровождения по сравнению с прототипом.
Таким образом, вновь введенное устройство решения уравнения компенсации при N≥2 и новые связи между элементами в предлагаемом устройстве позволяют учитывать нелинейные искажения и изменения крутизны пеленгационной характеристики в процессе функционирования системы А-О, что обеспечивает повышение точности устройства пеленгации и сопровождения с компенсацией искажений пеленгационной характеристики системы антенна-обтекатель.
Устройство пеленгации и сопровождения с компенсацией искажений пеленгационной характеристики системы антенна-обтекатель (А-О), содержащее последовательно соединенные пеленгационную антенну, пеленгационный приемник, электромеханический привод, выходы которого механически соединены с пеленгационной антенной, которая механически соединена с датчиком углов поворота пеленгационной антенны, устройство хранения семейства коэффициентов разложения пеленгационной характеристики системы антенна-обтекатель для различных параметров сопровождения, вычислитель координат точек места сопряжения смежных секторов углов поворота пеленгационной антенны в обтекателе, расположенных в непосредственной близости от текущих значений углов поворота пеленгационной антенны, вычислитель аппроксимирующих сплайнов, предназначенный для вычисления текущих значений коэффициентов разложения пеленгационной характеристики, датчик текущих параметров сопровождения, причем выходы датчика углов поворота пеленгационной антенны соединены с угломерными входами вычислителя координат и с угломерными входами вычислителя аппроксимирующих сплайнов, параметрические входы которого соединены с выходами датчика текущих параметров сопровождения, задающие выходы вычислителя аппроксимирующих сплайнов соединены с входами устройства хранения, выходы которого подключены к входам вычислителя аппроксимирующих сплайнов, координатные выходы которого соединены с входами вычислителя координат, выходы которого соединены с входами координат вычислителя аппроксимирующих сплайнов, отличающееся тем, что в него дополнительно введено устройство решения уравнения компенсации искажений пеленгационной характеристики на основании информации о коэффициентах разложения пеленгационной характеристики системы антенна-обтекатель и об угловом положении обтекателя относительно антенны, сигнальные входы которого подключены к выходам пеленгационного приемника, а выходы подключены к входам электромеханического привода, N входов коэффициентов разложения пеленгационной характеристики устройства решения уравнения компенсации подключены к N выходам текущих значений коэффициентов разложения пеленгационной характеристики вычислителя аппроксимирующих сплайнов, где N - количество коэффициентов разложения пеленгационной характеристики системы А-О, используемых для компенсации, причем значение N выбирается равным N≥2.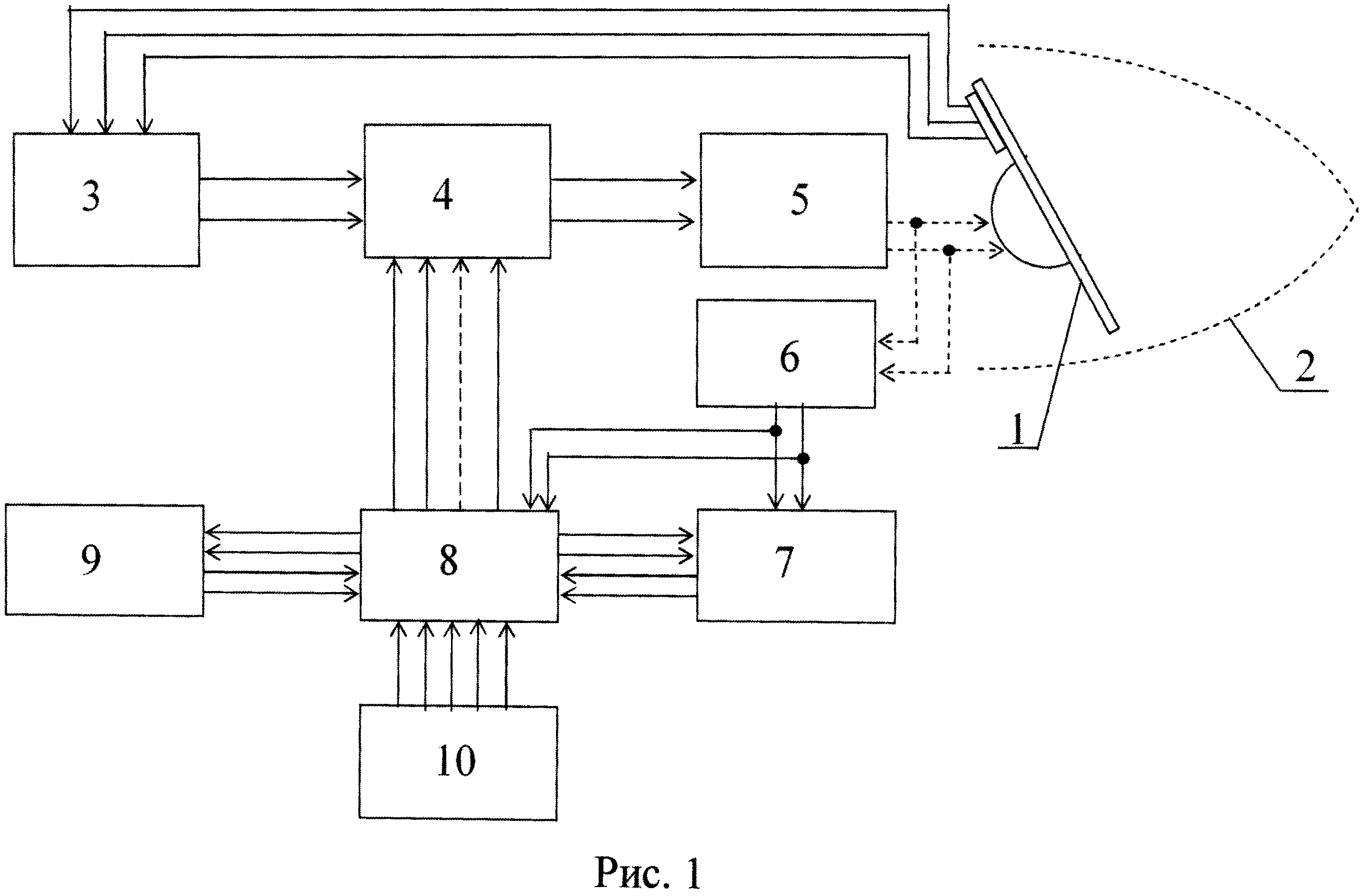
Измеритель пеленгационных характеристик систем антенна - обтекатель
Измеритель пеленгационных характеристик систем антенна-обтекатель
Измеритель пеленгационных характеристик систем антенна - обтекатель
Способ построения бортовых конических антенных решеток

