СПОСОБ ФОРМИРОВАНИЯ И ОТОБРАЖЕНИЯ РАСТРА, СВЕТОМЕХАНИЧЕСКИЙ ИНДИКАТОРНЫЙ ЭЛЕМЕНТ, СПОСОБ УПРАВЛЕНИЯ СВЕТОМЕХАНИЧЕСКИМ ИНДИКАТОРНЫМ ЭЛЕМЕНТОМ, СПОСОБ УПРАВЛЕНИЯ МАТРИЦЕЙ ШАГОВЫХ ПРИВОДОВ, СВЕТОМЕХАНИЧЕСКИЙ РАСТРОВЫЙ ДИСПЛЕЙ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к способу и устройству для представления данных многоцветного изображения побитового отображения на точечном матричном дисплейном экране.
Уровень техники
Из уровня техники известно устройство дисплея, использующее матрицу цветовых управляемых аддитивных или субтрактивных элементов с красконаполненными прозрачными сосудами и источниками внутренней подсветки (патент RU 2361285, МПК: G09G 3/22, опубликован 14.02.2006 г). Сосуды располагаются либо рядом друг с другом, либо друг за другом, чем определяется цветовая модель изображения. Несмотря на высокую эффективность данного способа формирования растровых изображений, его отличает очень высокая конструкционная и технологическая сложность, т.к. для отображения одного пиксела используется сразу три основных канала формирования информации о цветовом тоне и одного или двух дополнительных для формирования информации о насыщенности и яркости. И технологическая сложность, и вытекающая из нее стоимость препятствуют их широкому рыночному внедрению.
Также известны способ и устройство для представления данных многоцветного изображения побитового отображения на точечном матричном дисплейном экране, на котором размещены лампы трех основных цветов (патент RU 2249257, МПК: G09G 3/20, G09F 9/30 опубликован 24/03/2000), представляющие собой реализацию высокофункциональной растровой системы, способной отображать видео и графическую растровую информацию в высоком качестве. Данную систему отличают очень высокая стоимость и энергопотребление, зачастую не оправдывающие поставленных задач.
Из уровня техники известно устройство индикации в виде электродвигателя-бленкера для использования в цифровых часах бленкерного типа, содержащее магнитопровод с обмоткой управления и ротор в виде диаметрально намагниченного постоянного магнита, размещенного на одном валу с индикатором. Корпус выполнен в виде двух пластин, в которых установлены опоры вала, закрепленные колонками, одна из которых выполнена магнитопроводящей и служит средством фиксации ротора при обесточенной обмотке. Вал и витки обмотки управления размещены параллельно валу ротора, выполненного заодно с индикатором в виде вращающегося магнита с цилиндрической боковой поверхностью (патент РФ №2020607 С1, МПК: G09F 11/235, H02K 37/00, опубликован 30.09.1994 г.).
Из уровня техники известно также устройство, которое может быть использовано в системах визуализации выходных данных вычислительных устройств и отображения информации на стадионах, аэропортах, вокзалах и т.п.Указанное устройство является индикатором и содержит корпус, в котором выполнено смотровое окно, ось, информационный элемент в виде полого цилиндрического стакана, на внутренней поверхности которого размещен один из выступов ограничителя вращения, электропривод, состоящий из постоянного магнита в виде диска и электромагнита с сердечником и катушкой (патент РФ №2018976 С1, МПК: G09F 11/23, опубликован 30.08.1994).
Недостатком указанных аналогов является то, что они имеют только два устойчивых состояния индикаторного элемента (головки, цилиндра), отличаются высокой сложностью выполнения и стоимостью производства.
Известно также устройство индикации в виде электромеханического привода трехцветной индикаторной головки элемента растрового изображения, содержащего основание с гнездами для установки статора, ротора и выводов подключения, статор с магнитопроводом и обмоткой и ротор, расположенные аксиально и обеспечивающие поворот ротора на фиксированный угол, выводы для запайки в печатную плату и элементы крепления на печатную плату. Привод снабжен механизмом фиксации ротора, содержащим зубчатые и шлицевые элементы, расположенные под углом 120° на валу ротора и на корпусе основания, с профилем, обеспечивающим устойчивую фиксацию в одном из трех статичных положений, соответствующих одному из цветов элемента растрового изображения в отсутствие импульсного управляющего сигнала, при этом усилие фиксации задается весом ротора; ротор выполнен в виде прямой трехгранной призмы, ось вращения которой перпендикулярна граням основания и может быть вертикальной или горизонтальной, а вдоль боковых ребер имеются гнезда для установки ферромагнитных вставок, предназначенных для образования магнитной системы статор-ротор, одна из которых имеет отличающиеся от других магнитные свойства, что обеспечивает индивидуальность магнитных свойств системы статор-ротор для одного из статичных положений ротора; боковые грани призмы ротора имеют выпуклую или прямую поверхность, окрашены в заданные цвета и выполняют роль элемента цветопередачи растрового изображения (патент РФ №2446547, МПК: H02K 19/10, G09F 11/02, опубликован 27.07.2011).
Недостатками данного устройства являются одноуровневый характер индикации в силу неделимости положений призмы ротора для каждого из отображаемых цветов растра, однонаправленность вращения ротора, большое время полного обновления индикации, отсутствие механизма установки начального положения и большая вероятность ошибок при работе из-за наличия участка фиксации, соответствующего неопределенному состоянию системы, невозможность достижения достаточной плотности формируемых растров, особенно цветового, содержащего в три раза меньше цветовых компонентов, что определяет также и его значительную линейчатость и малую насыщенность, конструкционная невозможность выполнения внутренней подсветки растра.
Известен способ импульсного питания светодиодов с помощью устройств управления на основе схемотехнических решений различных производителей аналоговых компонентов, например, компании "ZETEX", использующий накопленный катушкой индуктивности ток в период времени, предшествующий работе светодиода. Описание одного из решений на основе микросхемы ZXSC300 опубликовано в материалах Официального сайта: http://www.diodes.com/products/catalog/detail.php?item-id=1733&popup=datasheet Недостатком данного способа является прямое включение светодиода непосредственно в цепь питания катушки и невозможность использования такого включения в системе матричного управления.
Известно устройство управления излучением светодиодной матрицы (патент RU 2435337, H05B 43/00, 27.11.2011) содержащее М ключей, управляющие входы которых подключены к выходам схемы управления, светодиодную матрицу из М на N светодиодов, образующих группы, состоящие из 1.i, k.i, N.i светодиодов, и имеет блок стабилизаторов тока высокой точности (стабилизатор тока, поддерживающий ток с точностью не хуже 1%), вход которого соединен с выходом схемы управления через шину данных для передачи информации, а выход его соединен с катодами светодиодов соответствующей группы светодиодов, при этом аноды каждой из групп светодиодов светодиодной матрицы соединены с соответствующими силовыми электродами М токовых ключей, при этом другие силовые электроды этих токовых ключей соединены с положительным полюсом источника питания, а катоды каждой из групп светодиодов светодиодной матрицы соединены между собой. В данном способе с использованием высокоточных стабилизаторов тока невозможно осуществить одновременное управление светомеханической матрицей, содержащей светодиоды и катушки индуктивности.
Известен способ однофазного управления шаговым двигателем, для снижения потерь энергии использующий двухимпульсную команду управления (патент SU 1690169 A1, H02P 8/00, 07.11.91). Недостатком такого способа является необходимость анализа величины тока для определения момента начала действия второго импульса, что при матричном управлении не представляется возможным. Кроме того, временной промежуток между импульсами оказывается малым для его эффективного использования в системе матричного управления.
Известно устройство для установки печатных плат, содержащее корпус с направляющими для плат, платы, основание и прижимную планку с элементами фиксации в виде отогнутых пружинящих лапок с консольной частью скругленной формы (патент РФ №2214699 С2, Н05К 5/03, 2001). Необходимая жесткость устройства при сочленении и фиксации несущих элементов конструкции обеспечивается дополнительно за счет перераспределения внешних нагрузок на печатные платы. Особенностью такого устройства является необходимость использования дополнительных элементов фиксации печатных плат.
Целью изобретения является создание устройства для динамического формирования и отображения растровых изображений, лишенного указанных недостатков.
Раскрытие изобретения
Технический результат, на достижение которого направлена заявленная группа изобретений, заключается в создании способа энергосберегающего формирования растров больших форматов, обеспечивающего изменение полного информационного состояния каждого пиксела растра с помощью единственного элемента, управляемого по единственному каналу. Так, пиксел по команде одного канала управления может изменять уровень, цвет, яркость и насыщенность, обеспечивая отображение любого из основных цветов и части вторичных цветов с дискретностью уровней, соответствующих разрядности выводимого растра. Это позволяет формировать черный, белый и первичные цветовые растры с плотностью активных элементов и с разрешением растра по четкости, соответствующим физическому шагу элементов, а вторичные цветовые и тоновые растры с плотностью активных элементов 80%, соответствующей максимально возможному суммарному числу задействованных активных элементов в передаче такого растра, и с разрешением по четкости 66%, соответствующем структуре их расположения.
Другой технический результат заключается в создании способа формирования растров, обеспечивающего более высокую равномерность отображения цветовых оттенков, уменьшение заметности строчной структуры и линейчатости тоновых и вторичных растров.
Другой технический результат заключается в создании способа формирования растров, обеспечивающего высокую визуальную плотность и однородность отображаемых растров, улучшенную диаграмму направленности наблюдения и усиление контрастности изображений.
Другой технический результат заключается в создании светомеханического индикаторного элемента, способного обеспечить при использовании его в качестве пиксела растра отображение черного, белого и каждого из первичных аддитивных цветов, а также части их оттенков с дискретностью уровней, определяемой разрядностью элемента. Важным результатом является использование при этом единственного канала управления элементом.
Другой технический результат заключается в создании светомеханического индикаторного элемента, обеспечивающего максимальную величину визуальной площади индикаторной зоны с помощью оптического корректора.
Другой технический результат заключается в создании светомеханического индикаторного элемента, имеющего внешний ротор, что позволяет разместить статор внутри него и обеспечить сбалансированное действие на ротор, не препятствуя при этом отображению информации элементом и обеспечивая высокие энергетические характеристики привода. Также обеспечивается возможность реализации двунаправленного вращения ротора, уменьшающего среднее время смены состояний и обеспечивающее возможность возникновения ошибки только в пределах одного полного оборота и гарантируемый возврат в положение обнуления.
Другой технический результат заключается в создании светомеханического индикаторного элемента, статор электропривода которого содержит единственную обмотку и единственный стержневой сердечник для каждой группы полюсов, что существенно удешевляет стоимость изделия при сохранении всех технических характеристик электропривода.
Другой технический результат заключается в создании светомеханического индикаторного элемента, обладающего малым стартовым моментом благодаря компенсирующему вес ротора действию постоянного магнита статора, что сокращает временные и энергетические затраты на исполнение шага. Также действием магнита обеспечивается стабильность осевого усилия на ротор, соответственно, стартового осевого момента.
Другой технический результат заключается в создании светомеханического индикаторного элемента, статор которого допускает установку внутреннего источника света, работающего от действия токов статора.
Другой технический результат заключается в создании светомеханического индикаторного элемента с однофазным электроприводом и односторонним вращением, имеющего повышенную стабильность движения и обнуления в однофазном режиме, а в предельном случае допускающего использование одного на группу из четырех прилегающих элементов постоянного магнита статора, максимально снижающее стоимость изготовления конечного устройства.
Другой технический результат заключается в создании способа управления светомеханическим индикаторным элементом и светомеханической матрицей, при котором система матричного управления использует единые каналы и линии передачи сигналов команд управления как световой, так и механической матрицами, элементы которых соединены электрически поканально параллельно, что существенно упрощает исполнение конечного устройства и снижает его стоимость, в целом обеспечивая логическую обоснованность практической реализации проекта. Использование исключительно реактивной составляющей токов управления и отсутствие активных сопротивлений в цепях управления обуславливает высокий КПД системы.
Другой технический результат заключается в создании способа управления светомеханической матрицей, обеспечивающего уменьшение полного времени управления матрицей и использующего принцип уплотнения сигналов, основанный на прерывании импульса управления на время инерционного фазового перехода ротора элемента и заполнении образовавшегося временного промежутка сигналами команд других элементов.
Другой технический результат заключается в создании светомеханического матричного дисплея, обеспечивающего высокую точность отображения растров, уменьшенное время ^нормирования растров и энергопотребление.
Другой технический результат заключается в создании светомеханического матричного дисплея, имеющего интегрированную структуру конструкционного и функционального исполнения, реализованную на сочетании блочно-модульного принципа исполнения с универсальностью выполняемых функциональными узлами задач.
Другой технический результат заключается в создании системы матричного управления светомеханическим дисплеем, обеспечивающую управление световой и механической матрицами по единым линиям и каналам управления в раздельном и смешанном временном режиме.
Для достижения указанных результатов предложен способ динамического формирования светомеханического растра, использующий механические индикаторные элементы с пятью последовательно расположенными цветовыми участками индикаторной поверхности, которые с помощью электропривода обращаются к стороне наблюдения либо одним целиком, либо частями двух прилегающих. Такие элементы обеспечивают возможность изменения полного информационного состояния цветового пиксела путем отображения каждым элементом любого из трех первичных аддитивных цветов используемой цветовой модели с уровнем яркости и насыщенности, определяемым разрядностью растра, и используют при этом один канал управления элементом. В зависимости от конструктивного вида каждым элементом возможно отображение соответствующих вторичных цветов, когда к стороне наблюдения обращены части двух прилегающих цветовых поверхностей.
Повышение равномерности отображения цветовых растров достигается путем формирования пиксельных групп из элементов, подразделяющихся на три вида и два подвида, комплементарных по направлению чередования участков относительно черного и направлению вращения относительно друг друга. Элементы одного вида располагают в группе по диагонали с периодом чередования два, а элементы по видам и подвидам располагают по вертикали с периодом три. Заданный порядок расположения однотипных элементов в группе и периодическое расположение самих групп обеспечивает наклонность вторичных и тоновых растров.
Для уменьшения заметности строчной структуры при отображении уменьшенных уровней черно-белого и первичных растров, вторичных и тоновых растров, элементы в прилегающих столбцах матрицы располагают попарно симметрично с противоположным чередованием цветовых участков и обеспечивают взаимопротивоположное направление их смены, что обеспечивает чередующееся относительно оси вращения расположение цветовых зон относительно оси поворота и неизменность границ строки.
Для увеличения визуальной плотности и равномерности восприятия растров, повышения контрастности, формирования требуемой диаграммы направленности светового потока растра и его наблюдения, используется корректирующая оптическая матрица отражающе-преломляющих элементов, имеющая аналогичную механической размерность и располагающуюся перед ней по своей главной оптической оси. В качестве преломляющих используются коллиматорные элементы, в качестве отражающих ступенчатые рефлекторы.
Для реализации способа формирования растров используются светомеханические электроприводные индикаторные элементы, имеющие индикаторную поверхность, выполненную прозрачно-отражающей и содержащую черный, белый и три цветовых аддитивных участка, число шагов привода и угловых положений элемента при этом кратно пяти в соответствии числу участков. Каждый элемент с помощью электропривода последовательно обращает в сторону наблюдения либо черную, либо белую, либо один из цветовых аддитивных участков, либо части двух сопряженных участков, используя при этом единственный канал управления электроприводом. От соотношения площадей обращенных к стороне наблюдения цветовых участков зависит либо яркость, либо насыщенность, либо цветовой тон пиксела, возможный диапазон соотношений определяется разрядностью элемента, в свою очередь определяемой числом шагов электропривода. Направление смены участков может быть как одно, так и двухсторонним. Последовательность отображения состояний и способность индикаторной поверхности отображать каждое состояние определяют достаточность единственного последовательного канала управления для смены состояний.
Для повышения визуальной площади индикаторной зоны элемента используется либо отражающий, либо преломляющий оптический корректор, либо оба вместе. Отражающий корректор устанавливается в промежутках между границами индикаторной зоны и конструкционными границами элемента, имеет ступенчатую поверхность, формирующую заданную диаграмму направленности отраженного потока. Преломляющий корректор устанавливается перед индикаторной зоной, визуально увеличивая ее площадь и формируя заданную диаграмму направленности. В качестве корректора используется цилиндрический коллиматор типа линз Френеля.
Для обеспечения высокой точности исполнения команд электромеханический привод элемента выполняется двунаправленным реверсивным с горизонтальным расположение оси, ротор которого выполнен внешним по отношению к статору и может совершать шаги реверсивно в любом из направлений и ровно в количестве, соответствующем полному обороту. С этой целью магнитную систему статора выполняют многофазной и размещают внутри ротора, а его вращение ограничивают простыми упорами в пределах одного оборота.
Благодаря внутреннему по отношению к ротору исполнению статор имеет предельно простое исполнение магнитопроводов полюсных групп в виде многозубцовых стержней с единственной фазной обмоткой для каждого. Это становится возможным благодаря тому, что ротор не имеет вала как такового, что позволяет магнитопроводам и обмоткам статора располагаться по оси привода, обеспечивая симметричное действие полюсов на магнитопровод ротора.
Для уменьшения влияния веса ротора на пусковой момент электропривода пассивный полюс статора, содержащий постоянный магнит, выполнен асимметричным и содержит один магнит, действие которого направлено против силы тяжести и компенсирует вес ротора, снижая стартовый момент трения. Кроме того, расположение магнита обеспечивает направление действия его силы на ротор в сторону основания и постоянство относительного осевого положения ротора, что благоприятно сказывается на стабильности параметров магнитных взаимодействий в системе статор-ротор привода, который отличает предельная простота конструкционного исполнения.
Благодаря внутреннему исполнению статор позволяет разместить на своем корпусе светоизлучающий диод для внутренней подсветки индикаторной зоны, а благодаря используемому способу управления обеспечивается возможность простого параллельного соединения светодиода и обмотки электропривода, при котором питание светодиода обеспечивается током самоиндукции обмотки. При этом корпус статора может быть выполнен из прозрачного материала и иметь оконный проем для лучшего распространения светового потока в сторону индикаторной зоны ротора.
Для упрощенного варианта однофазного исполнения светомеханического индикаторного элемента статор электропривода содержит дополнительный магнит фиксации, расположенный с внешней боковой поверхности магнитопровода ротора, его силовые линии направлены перпендикулярно к боковой поверхности магнитопровода ротора и их действие распространяется на четыре прилегающих элемента. При этом магнитопровод ротора содержит дополнительный внешний зубец фиксации, взаимодействующий с дополнительным магнитом фиксации своей боковой гранью, чем создается дополнительный удерживающий момент в одном положении ротора, соответствующем стартовому.
Для случая предельной упрощенности и удешевления конечного устройства светомеханический индикаторный элемент содержит дополнительный внешний ряд зубцов, предназначенный для взаимодействия с пассивным полюсом статора, магнит которого для этого располагается с внешней боковой стороны ротора, его магнитные силовые линии направлены перпендикулярно к боковой поверхности зубцов магнитопровода ротора и их действие распространяется на четыре прилегающих элемента. Для создания дополнительного удерживающего момента на боковой поверхности основания магнитопровода ротора выполнен дополнительный наружный выступ расчетной высоты, обеспечивающий большую величину потокосцепления с магнитом фиксации.
Для увеличения динамического диапазона передаваемых уровней и градаций яркости каждого пиксела растра используется световая матрица аналогичной размерности, располагающаяся за механической по линии наблюдения, каждый из элементов которой является управляемым и обеспечивает необходимый уровень светового излучения пиксела. При этом принципиальной особенностью способа управления светомеханическим индикаторным элементом, механической и световой матрицами является использование одних и тех же линий, каналов и блоков управления механическими и световыми элементами, имеющими параллельное электрическое соединение. В качестве механического элемента выступает электропривод, в качестве светового светоизлучающий диод. Раздельное управление процессами механического формирования и отображения растра и его световой модуляции по единым линиям обеспечивается благодаря наличию в системе управления адресно отключаемых демпфирующих диодов с меньшим порогом открывания, а также отличающейся чувствительностью световых и механических элементов к уровням управляющих воздействий, и осуществляется с помощью распределения воздействий во времени и их широтно-импульсной модуляции. Для управления используется только реактивная составляющая токов благодаря наличию в цепи управления такого элемента, как обмотка электропривода, способная накапливать и использовать реактивную энергию.
Для осуществления способа временного уплотнения сигналов используется расщепленный импульс управления приводом, обеспечивающий трехтактный режим исполнения фазового перехода ротора электропривода, при котором средний тактовый интервал между импульсами используется для передачи последующих команд управления, чем достигается высокая плотность распределения сигнала во времени. Первый импульс команды управления сообщает ротору необходимую кинетическую энергию, определяющую скорость исполнения фазового перехода, второй обеспечивает компенсацию избытка остаточной энергии после перехода и остановку ротора. При этом число передаваемых команд определяется отношением длительности интервала между импульсами к длительности первого импульса и составляет группу уплотнения, включение первого канала в текущей группе уплотнения обеспечивают задним фронтом второго импульса последнего канала в предыдущей группе, включение текущего канала в группе уплотнения обеспечивают задним фронтом первого импульса предыдущего включенного канала в группе.
Для осуществления предложенного способа формирования и отображения растровых изображений и управления процессами формирования предложено устройство - светомеханический матричный дисплей, содержащий массив светомеханических индикаторных элементов, расположенных и скоммутированных в порядке прямоугольной матрицы с заданным числом строк и столбцов, и использующее вышеописанные способы управления.
Основным конструкционным узлом светомеханического матричного дисплея является блок сдвоенных столбцов, содержащий токоведущее пластинчатое основание, располагающееся перпендикулярно главной плоскости дисплея. На основании размещаются корпуса и магнитопроводы статоров электромеханических приводов, коммутационные и вспомогательные элементы, источники света, большинство из которых подлежит автоматической установке на специализированном оборудовании. Элементы, принадлежащие соседним столбцам, располагаются симметрично относительно токоведущего основания, что автоматически обеспечивает выполнение условия взаимно противоположного чередования цветовых граней индикаторных зон, используя при этом однотипные корпуса индикаторных элементов и одинаковое направление относительного поворота. Факт сдваивания столбцов в блок обеспечивает их более плотное примыкание друг к другу, уменьшающее заметность вертикальной конструкционной структуры растра. Блоки устанавливаются в герметичный корпус плоскостью своего основания перпендикулярно основанию корпуса и одновременно служат ребрами жесткости, формируя заданную устойчивость конструкции растрового устройства к ветровым нагрузкам. Передняя стенка крышки корпуса выполняется из прозрачного материала с заданным коэффициентом преломления, на внутренней поверхности которой одновременно выполняются преломляющие элементы корректирующей оптической матрицы. Отражатели оптических корректоров светомеханических элементов объединены в блоки решетчатой конфигурации, представляющие корректирующую матрицу рефлекторного типа, которая выполняется цельнолитой или штампованной с нанесенными зеркальными поверхностями, крепится на передних гранях оснований блоков, одновременно выступая в роли конструкционного элемента жесткости и обеспечивая дополнительную конструкционную целостность групповой сборки блоков. Также блок отражателей содержит упоры для передней стенки крышки корпуса, передающие ветровые нагрузки на основания конструкционных блоков, обеспечивая жесткость сборки по нормали к поверхности.
Система матричного управления дисплеем содержит имеющиеся по одному на каждый канал столбца матрицы демпфирующие диоды, которые адресно подключаются через аналоговый мультиплексорный коммутатор к входу аналогового демультиплексорного коммутатора строк, переводя канал управления столбцом из режима световыми элементами матрицы в режим механических. Система управления содержит также схему задержки порога переключения демпфирующих диодов, обеспечивающую псевдопараллельную работу светового и механического элементов в смешанном режиме.
Краткое описание чертежей
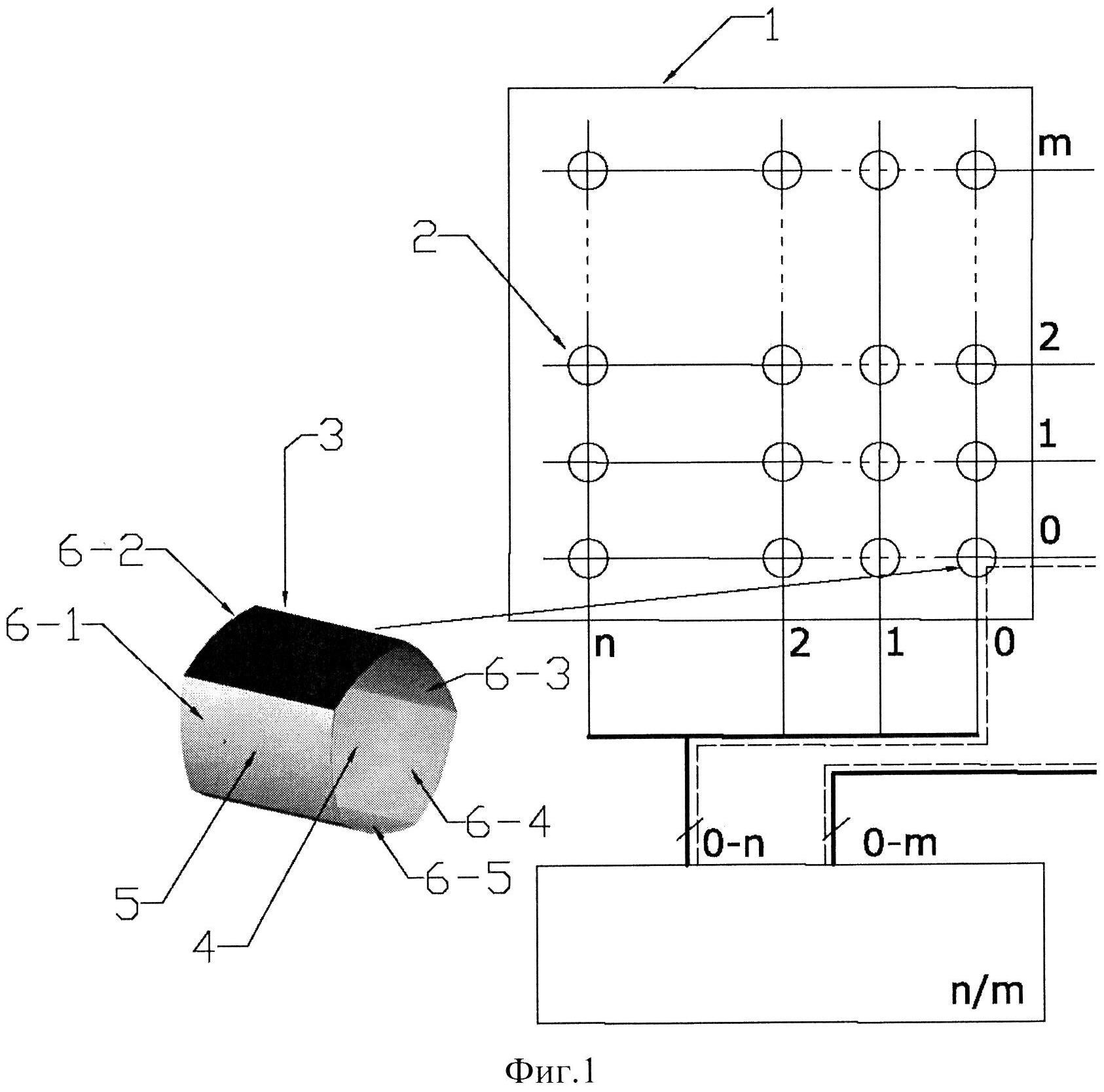
На фиг.1 показан принцип формирования механического растра с помощью матрицы электромеханических элементов.
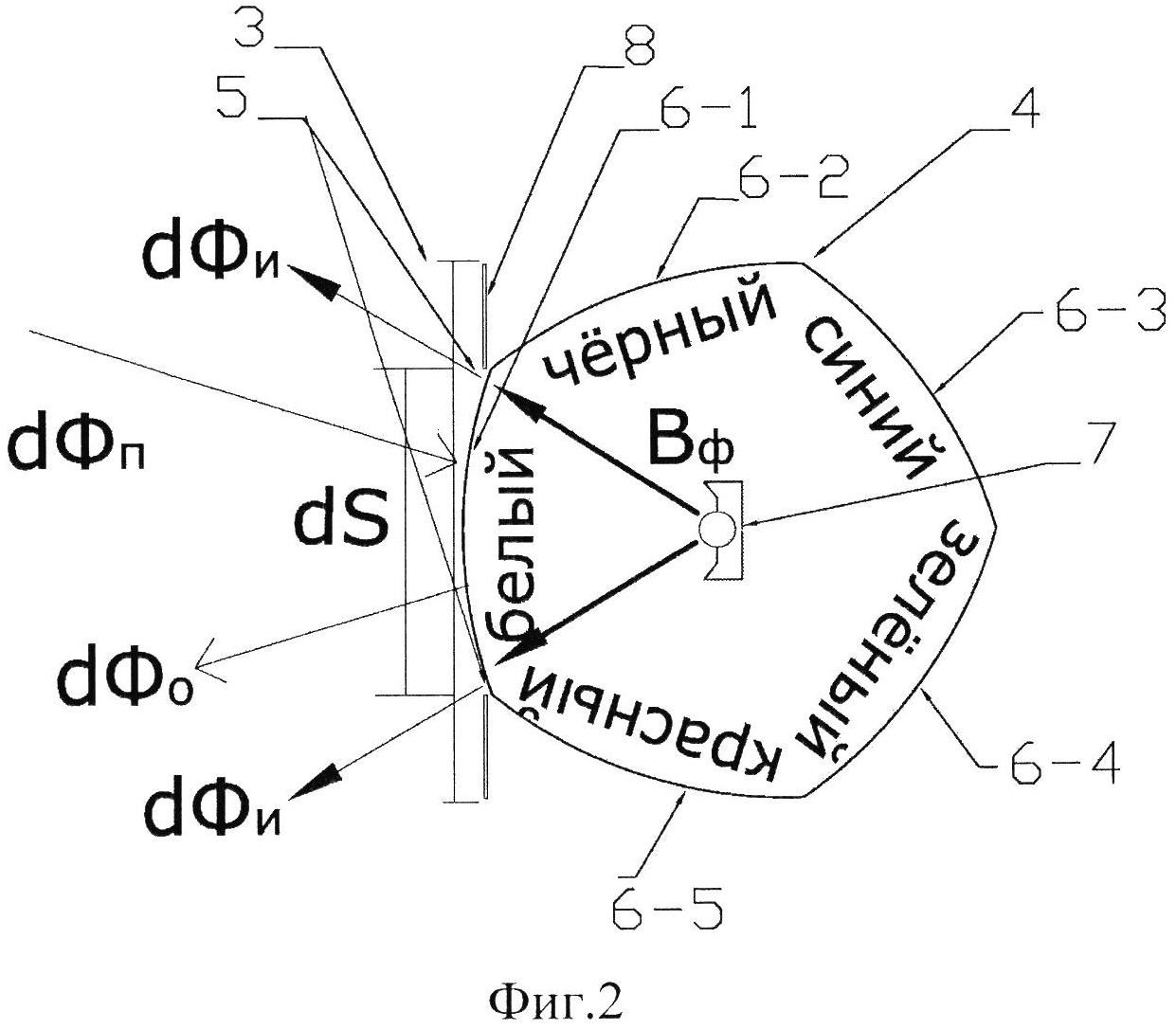
На фиг.2 показан принцип формирования индикаторной зоны механическим элементом.
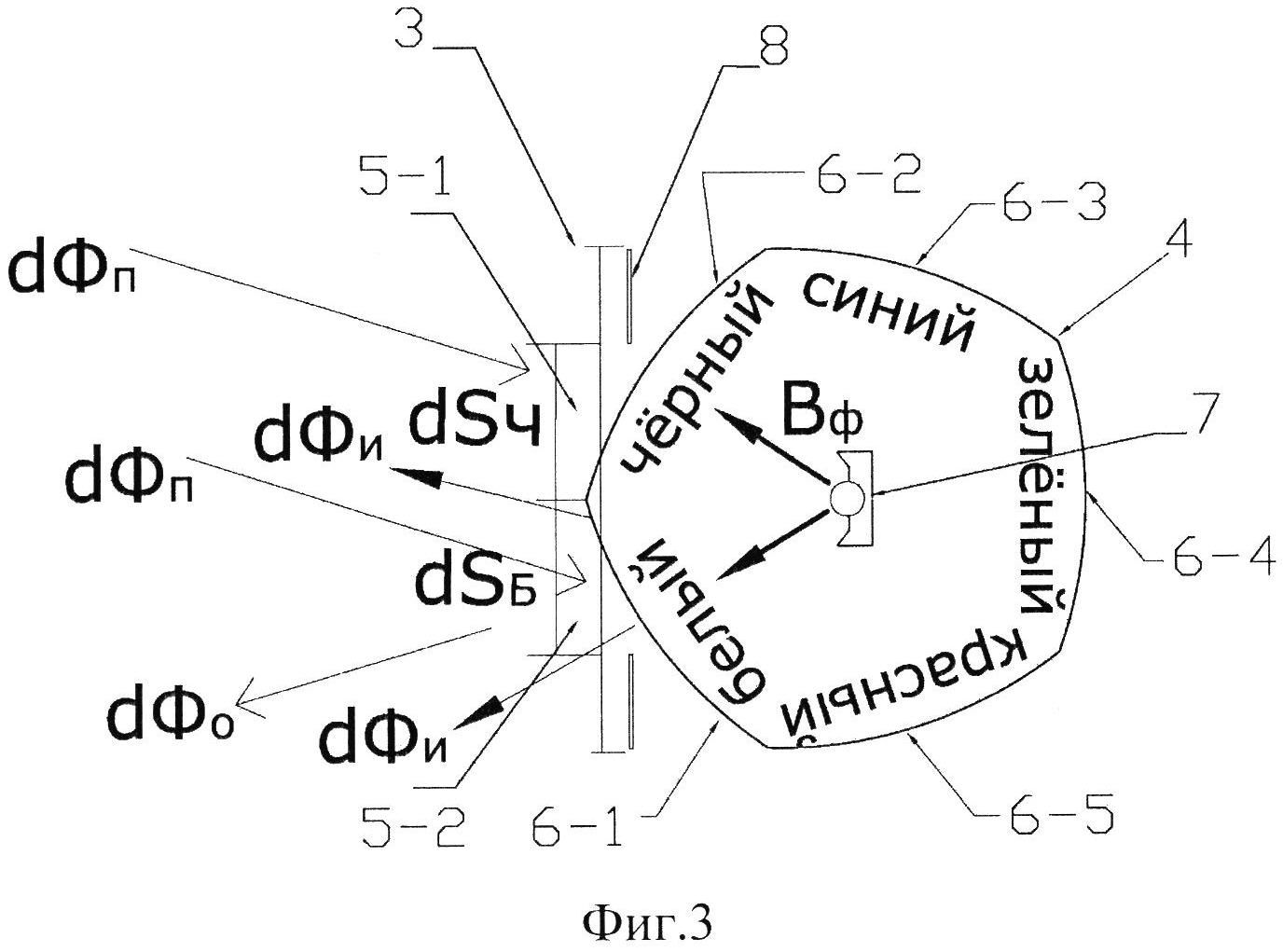
На фиг.3 показан принцип передачи светомеханическим элементом градаций уровня яркости пиксела.
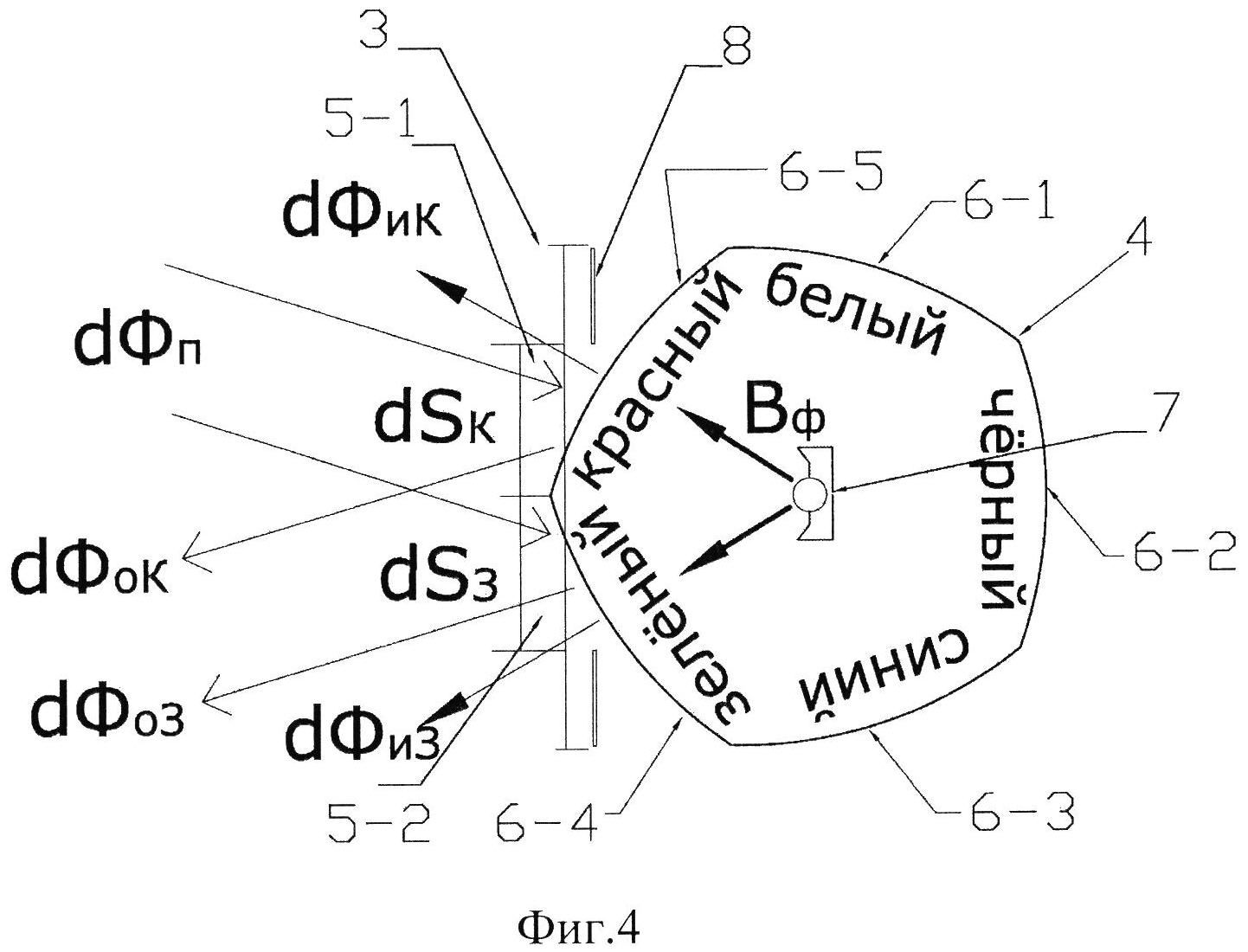
На фиг.4 показан принцип отображения светомеханическим элементом вторичных цветов растра и управления цветовым тоном и яркостью.
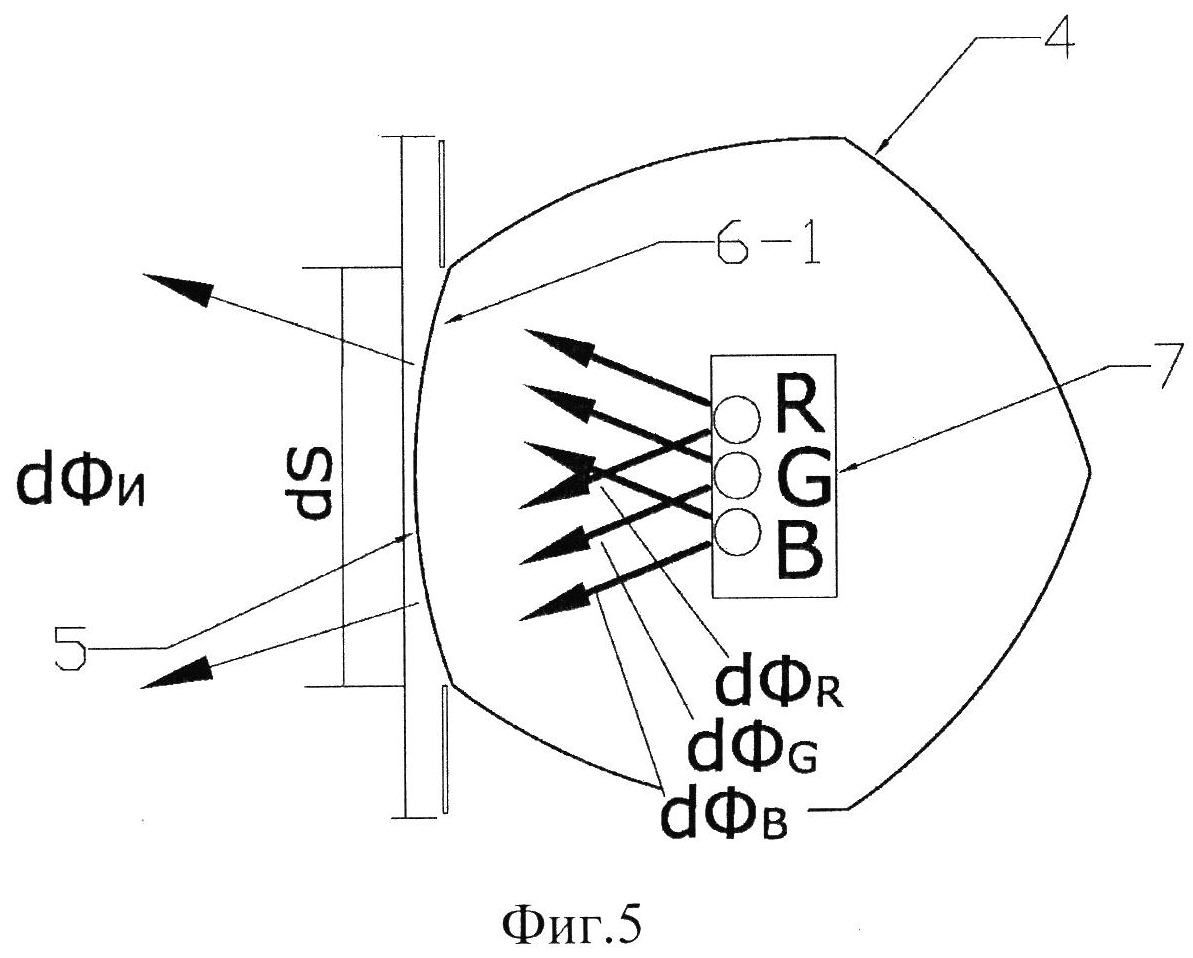
На фиг.5 показан принцип формирования суммарного светового потока излучения индикаторной зоной.
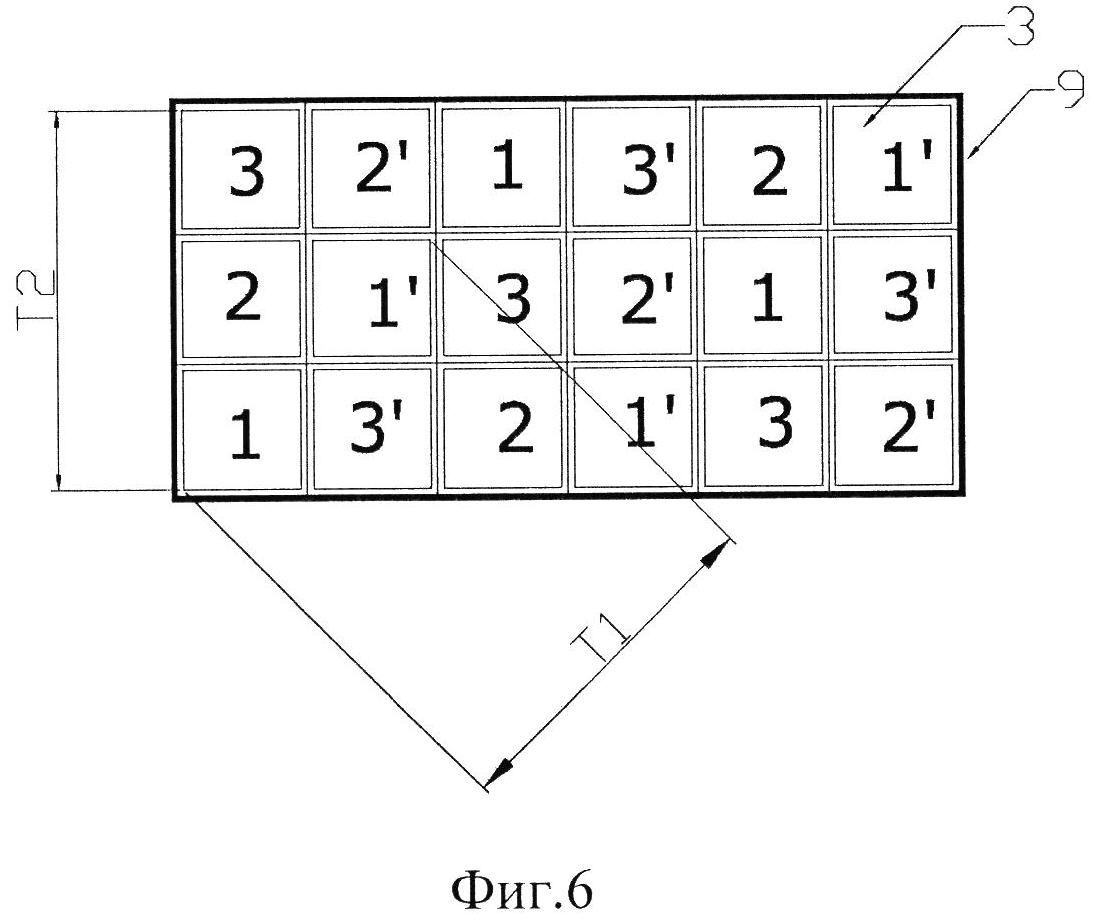
На фиг.6 показана конфигурация цветовой группы элементов.
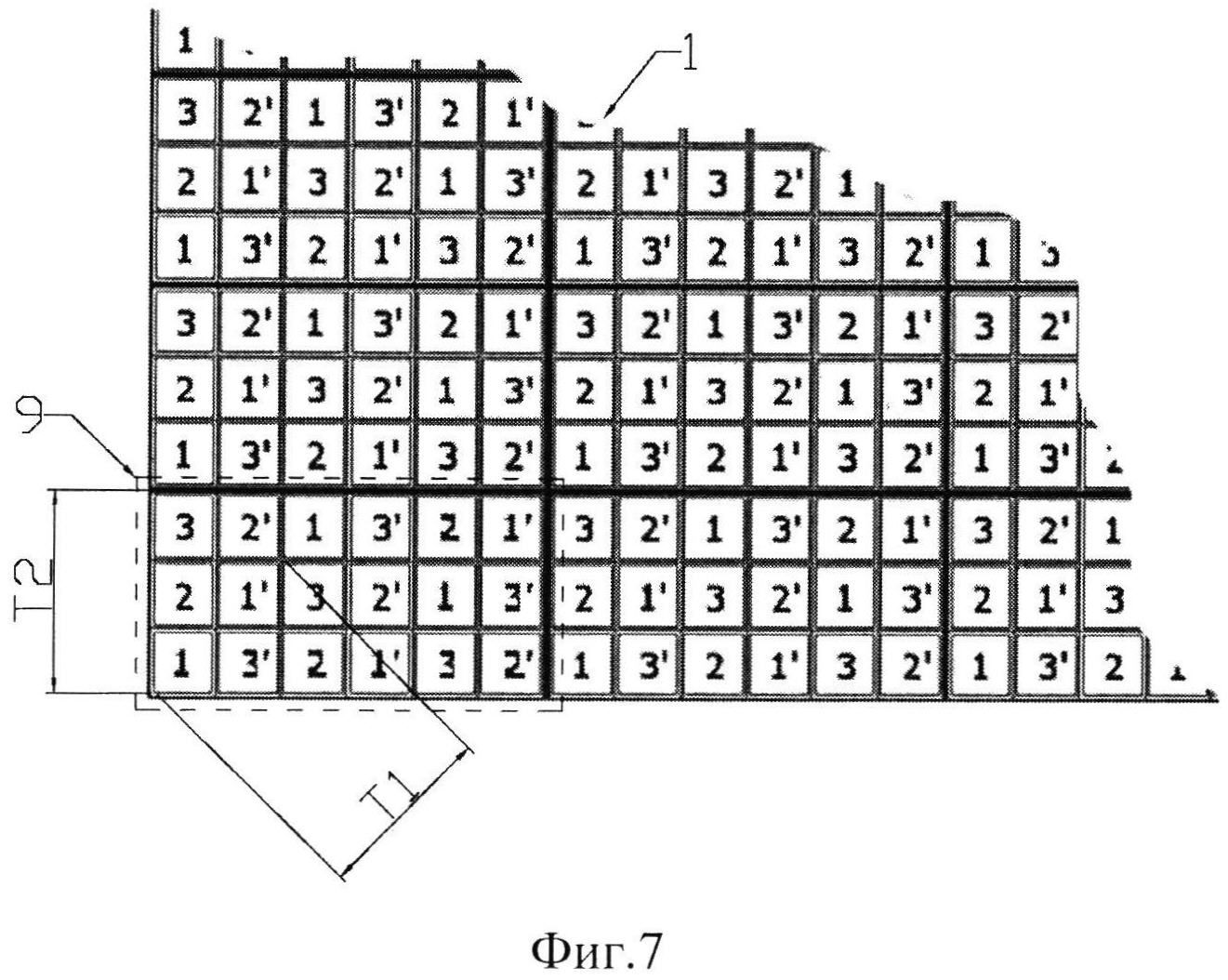
На фиг.7 показано расположение цветовой группы в матрице.
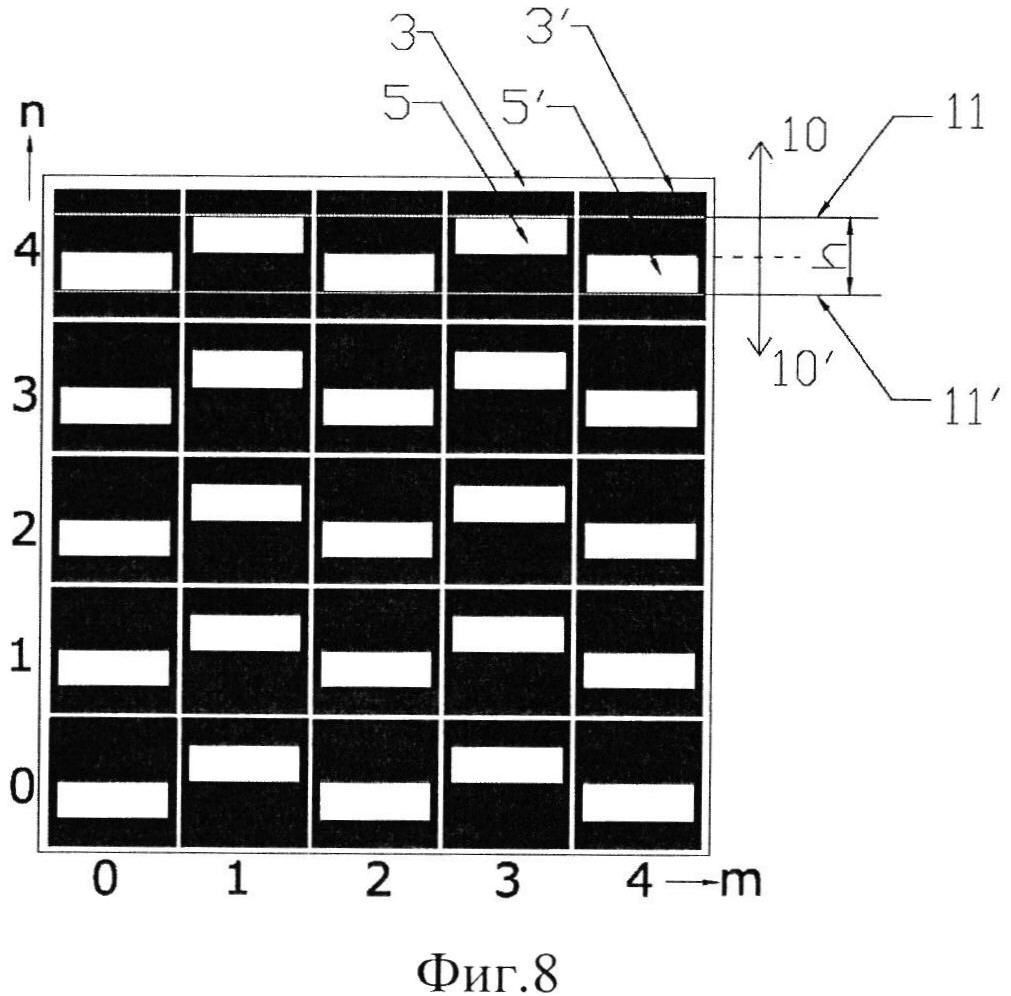
На фиг.8 показан принцип компенсации уменьшения эффективной толщины строки при отображении тоновых и вторичных растров.
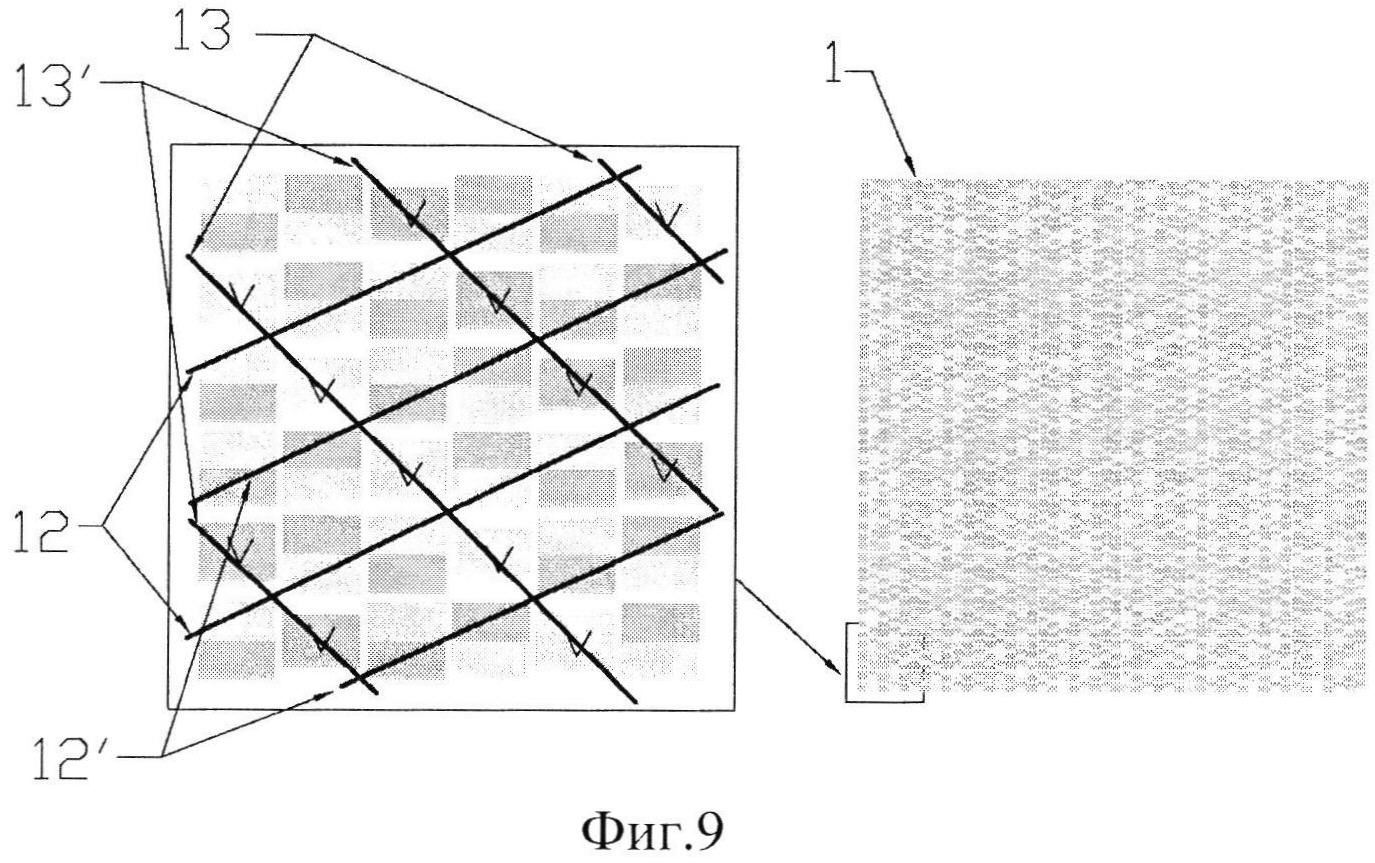
На фиг.9 показан принцип улучшения визуального восприятия вторичных растров.
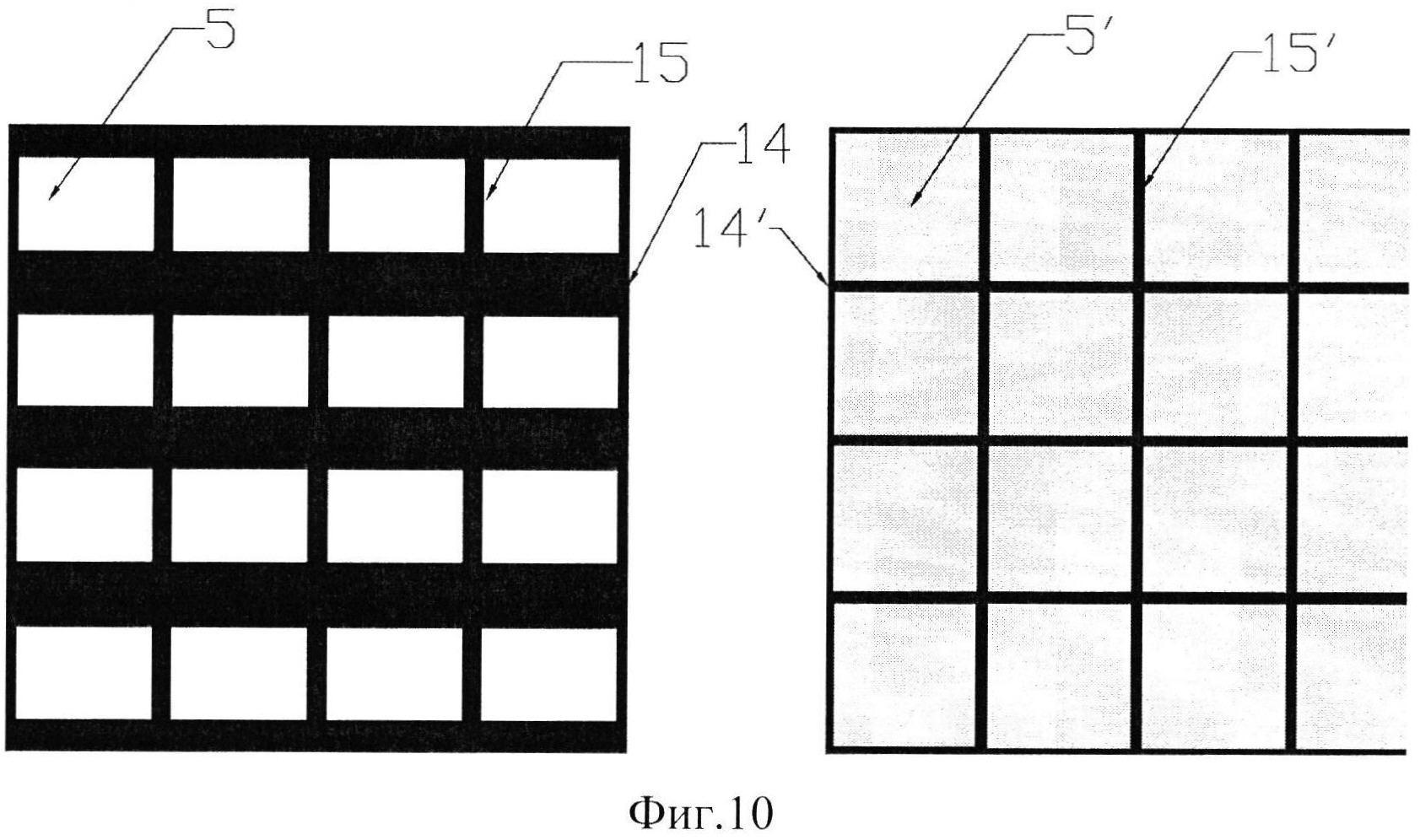
На фиг.10 показан результат действия полной матрицы оптического корректора.
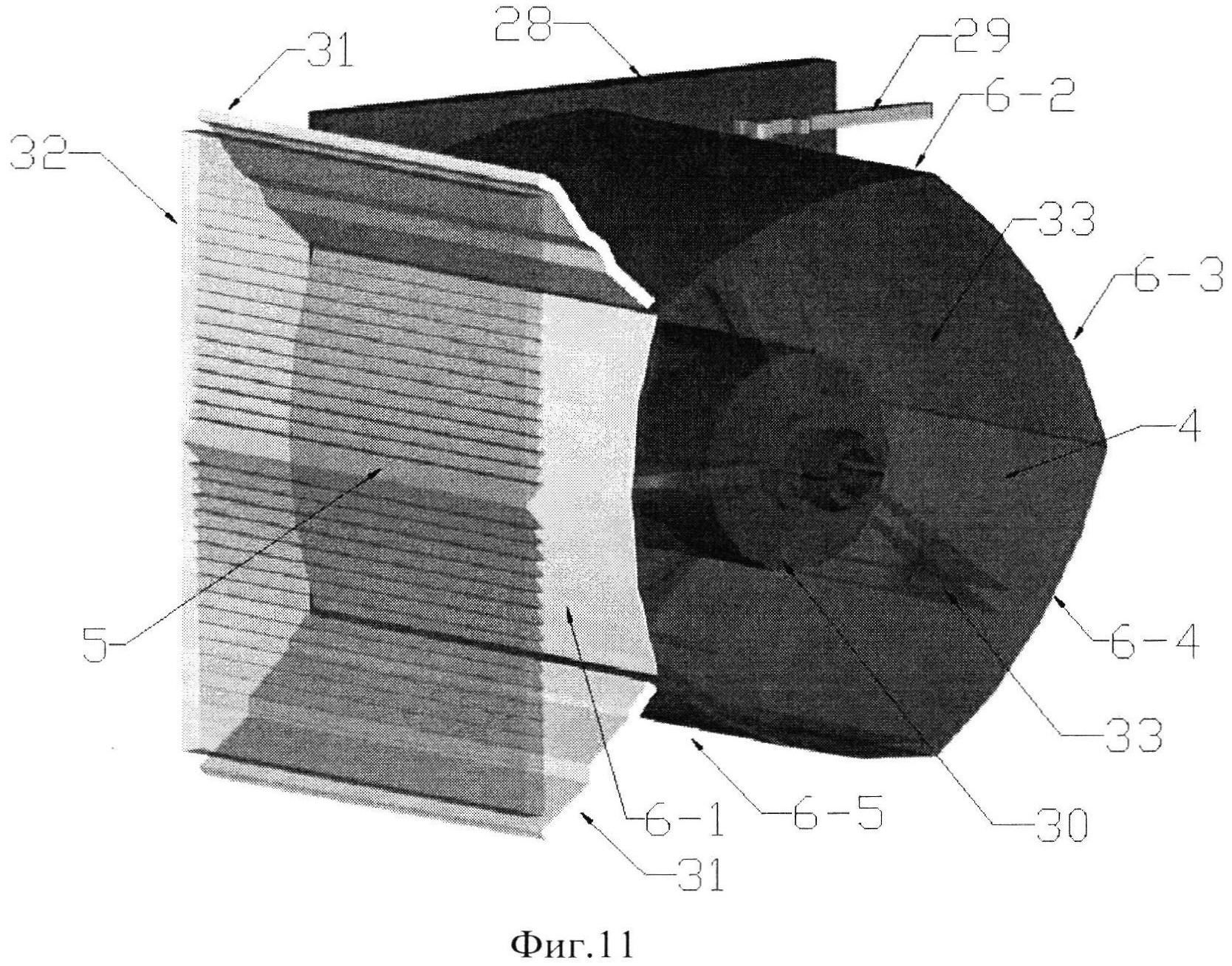
На фиг.11 показан эскиз общего внешнего вида индикаторного элемента:
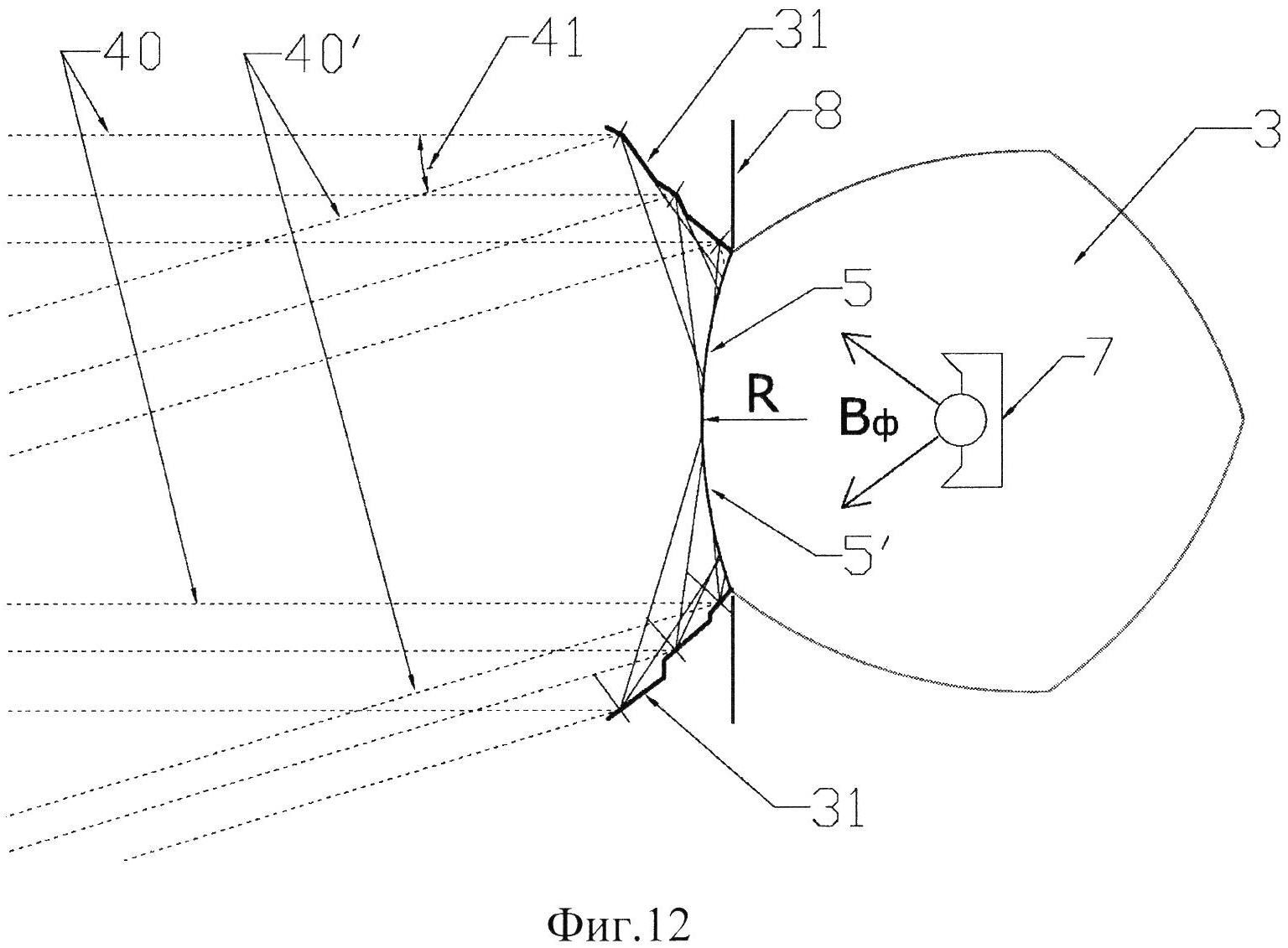
На фиг.12 показано действие рефлекторного корректора.
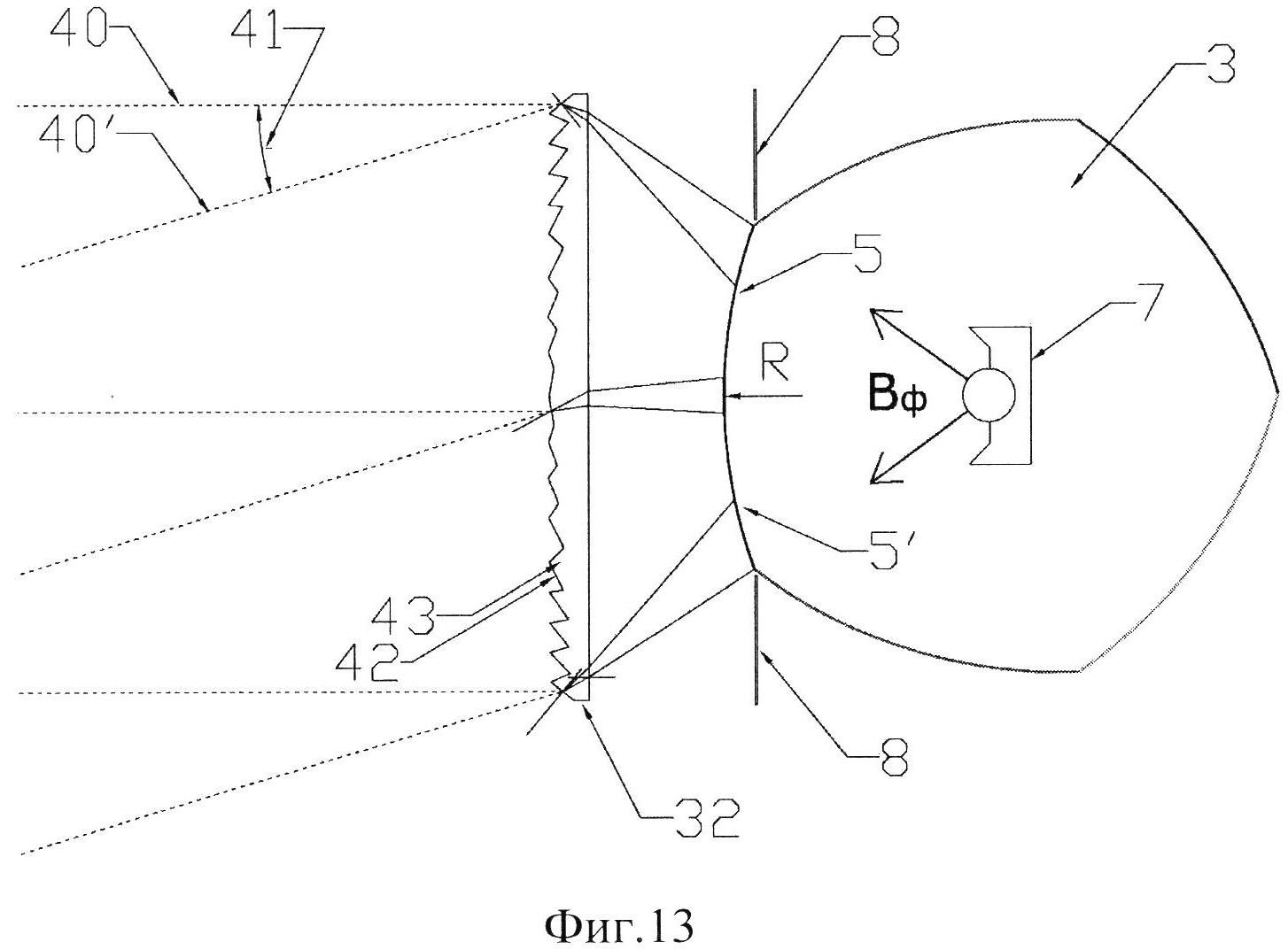
На фиг.13 показано действие преломляющего корректора.
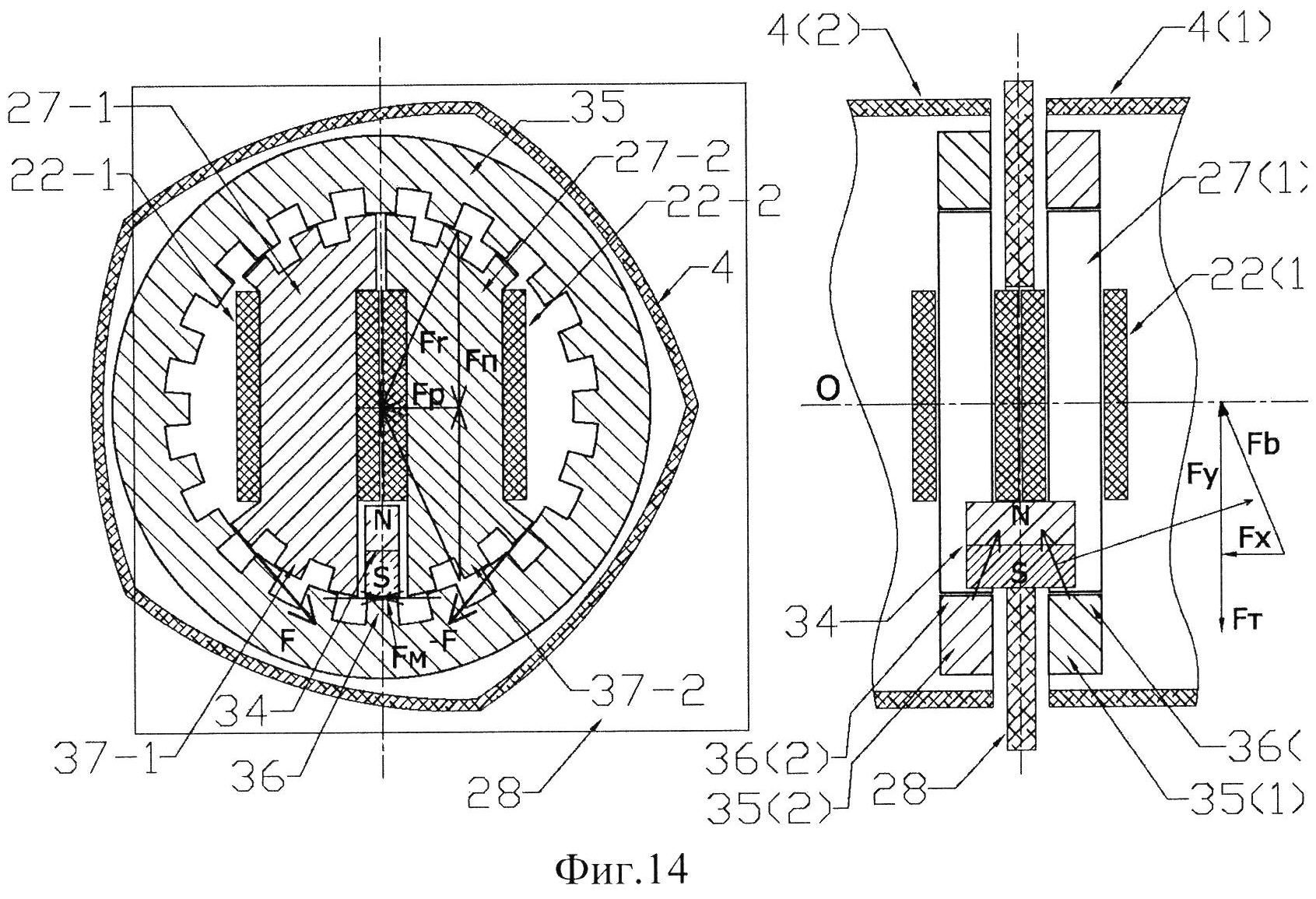
На фиг.14 показаны электромагнитная и кинематическая схема двухфазного электропривода.
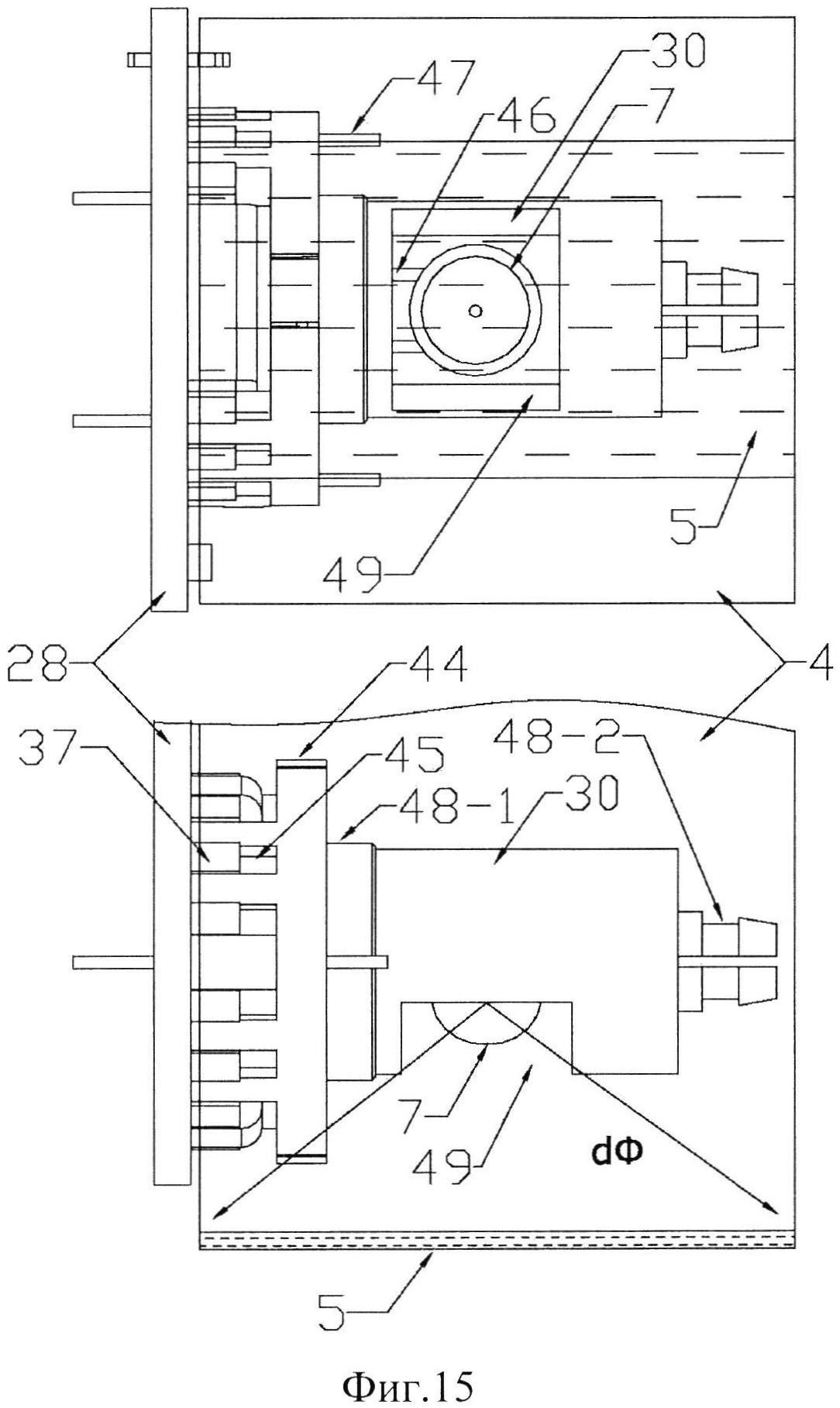
На фиг.15 показано положение внутреннего источника света и статора электропривода.
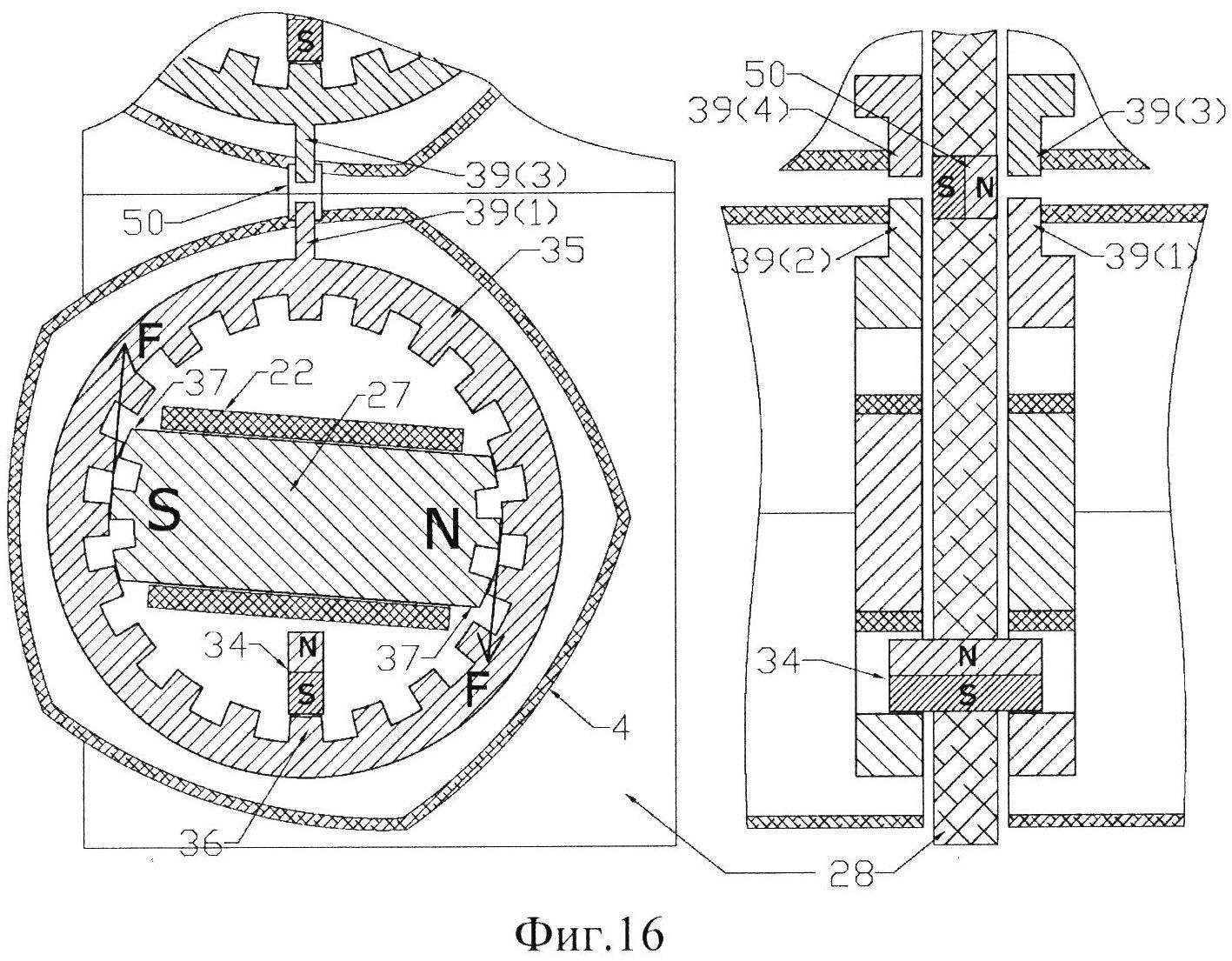
На фиг.16 показаны электромагнитная и кинематическая схема однофазного электропривода элемента с дополнительными внешними магнитом и зубцом фиксации.
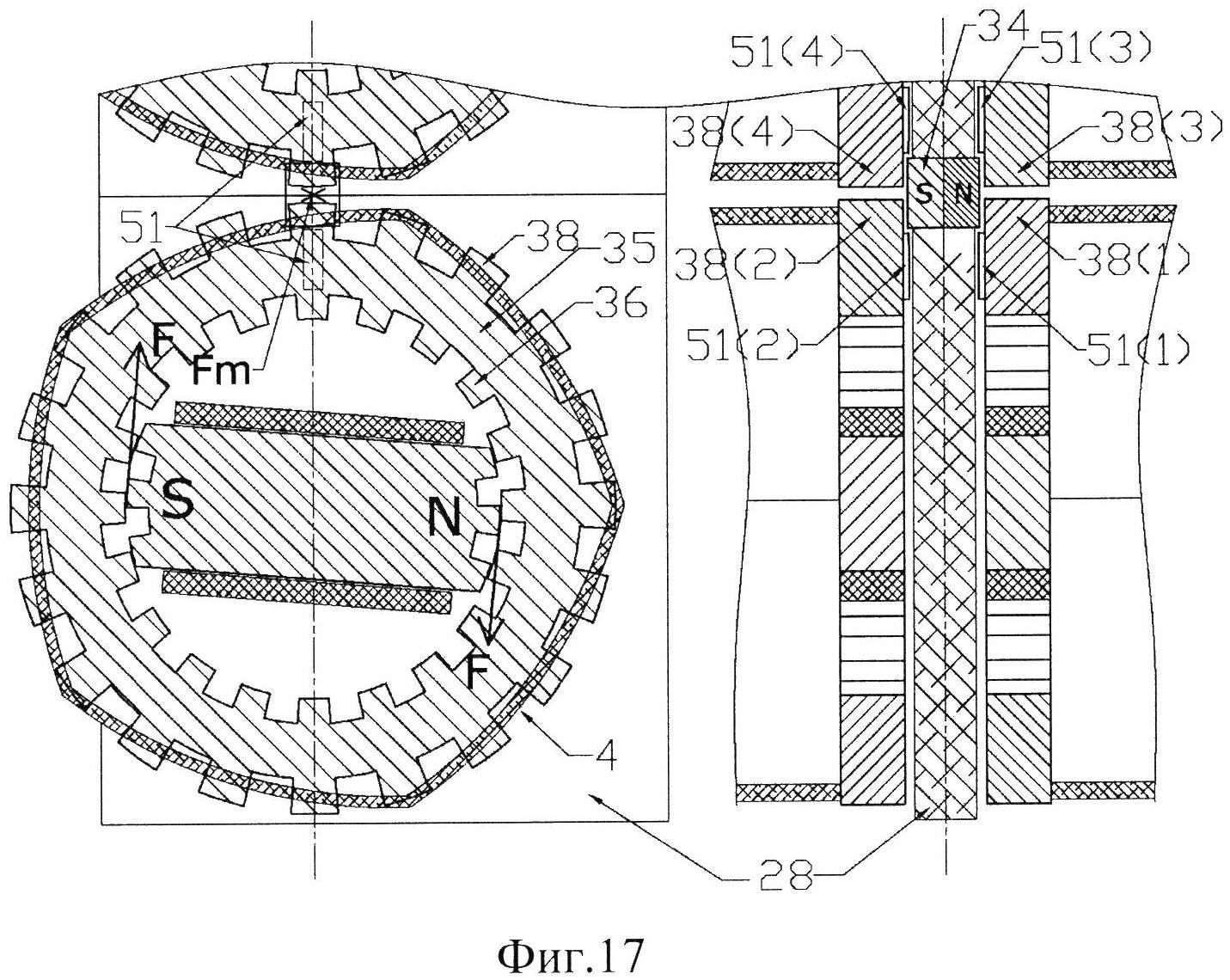
На фиг.17 показаны электромагнитная и кинематическая схема однофазного электропривода элемента с дополнительными внешними рядом зубцов и внешним магнитом статора.
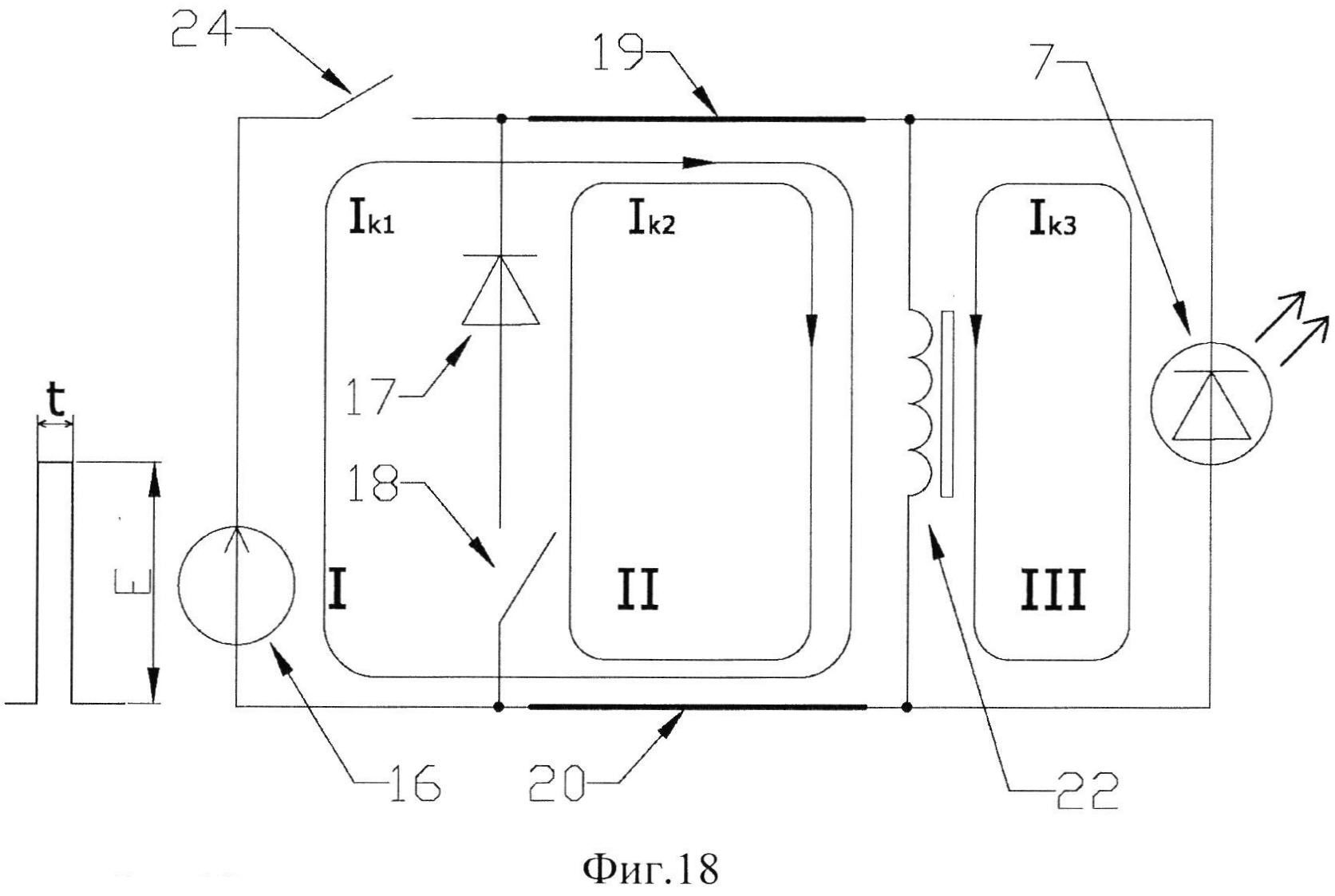
На фиг.18 показана схема формирования токов управления механическим и световым элементами.
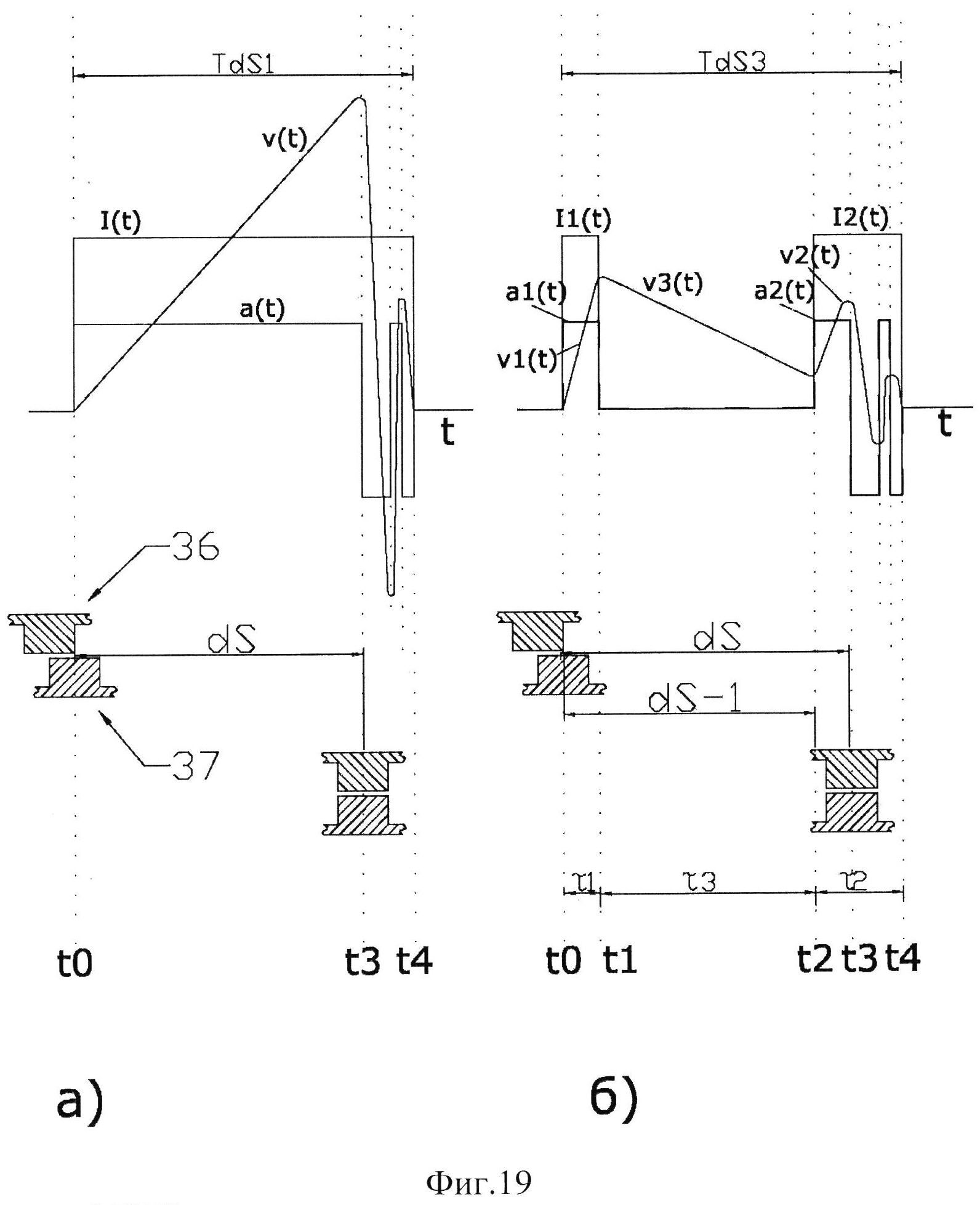
На фиг.19 показан принцип использования двухимпульсной команды управления.
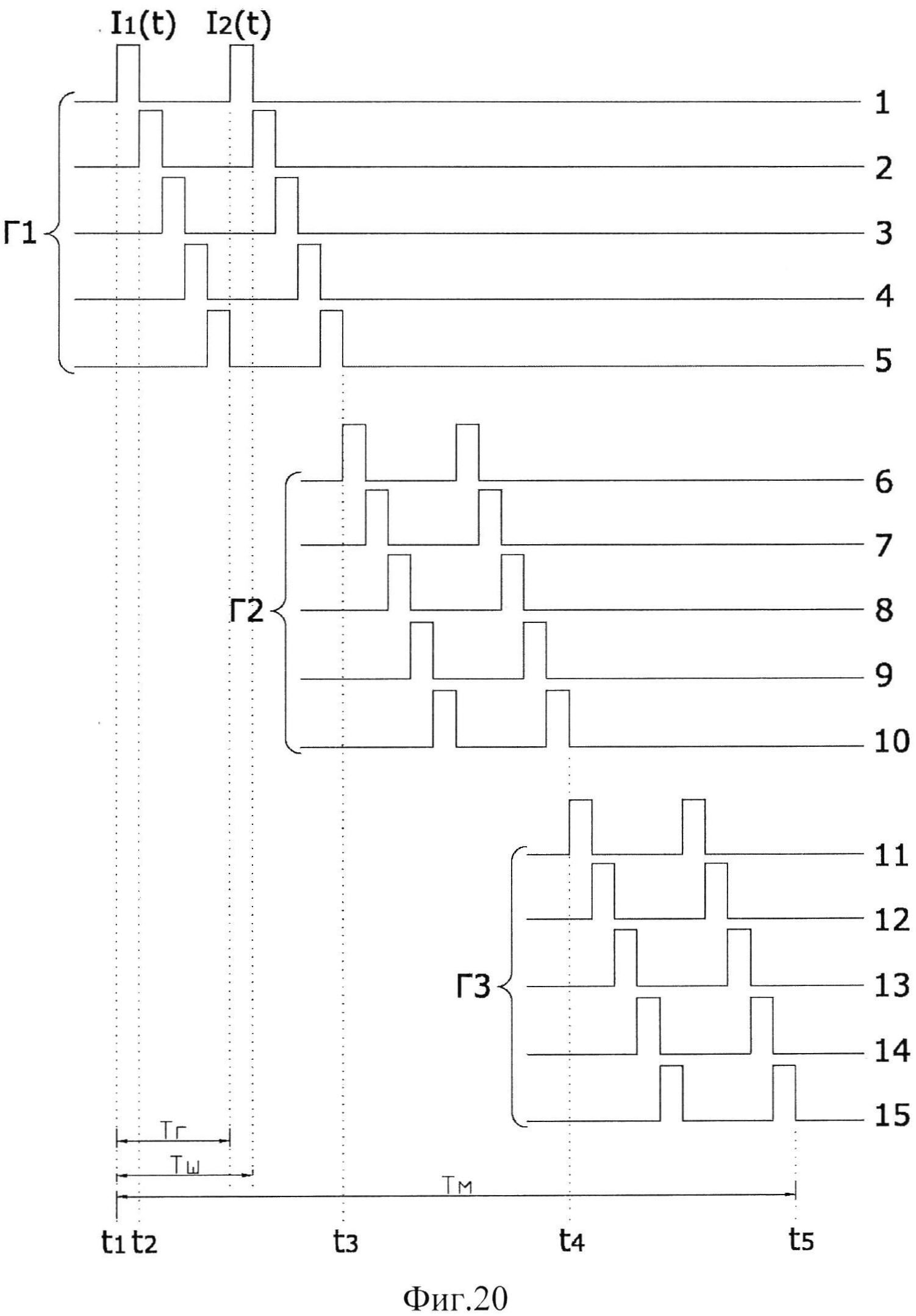
На фиг.20 представлена диаграмма распределения сигналов в группах уплотнения.
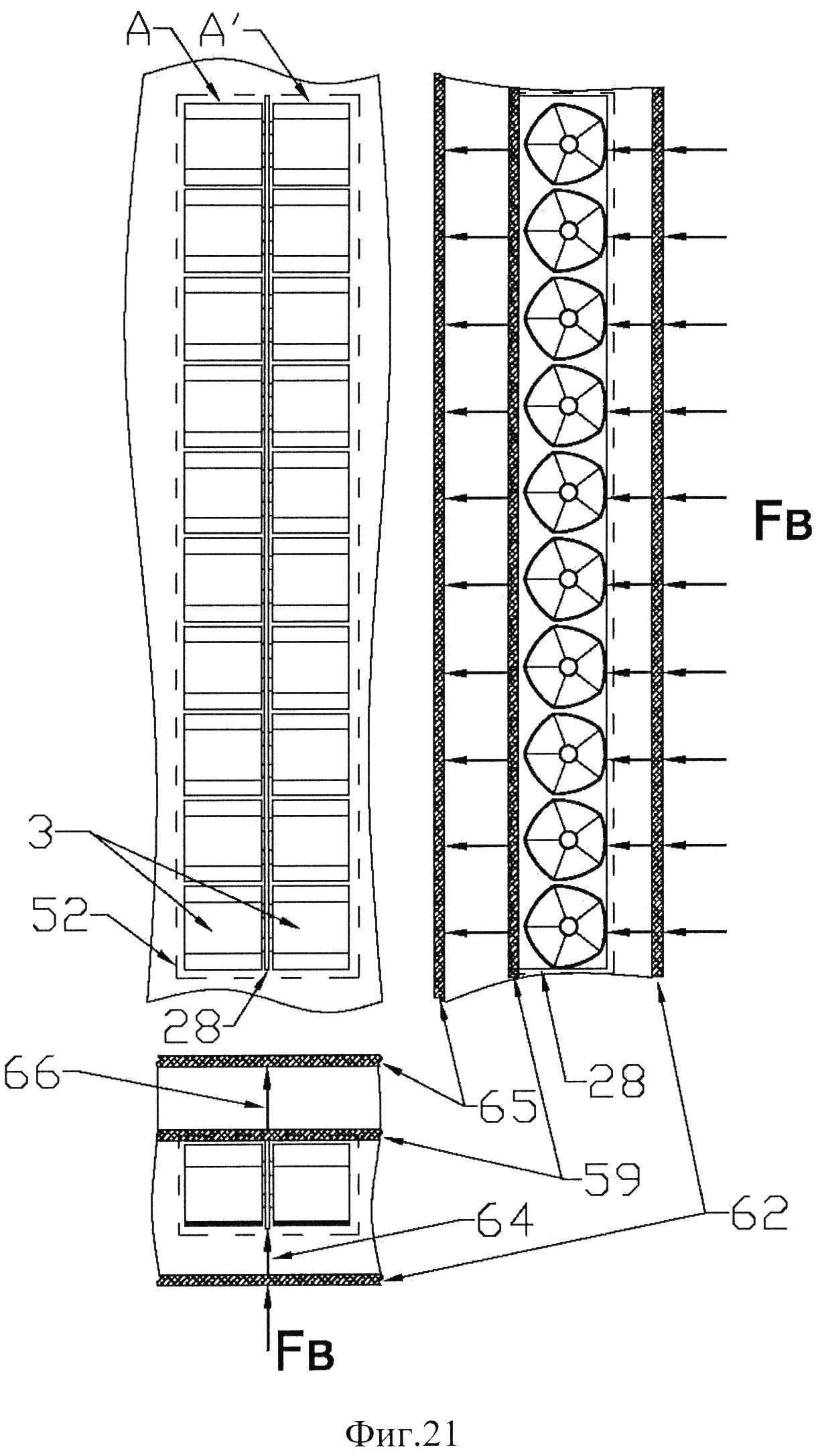
На фиг.21 показан эскиз общего компоновочного принципа конструкционного блока.
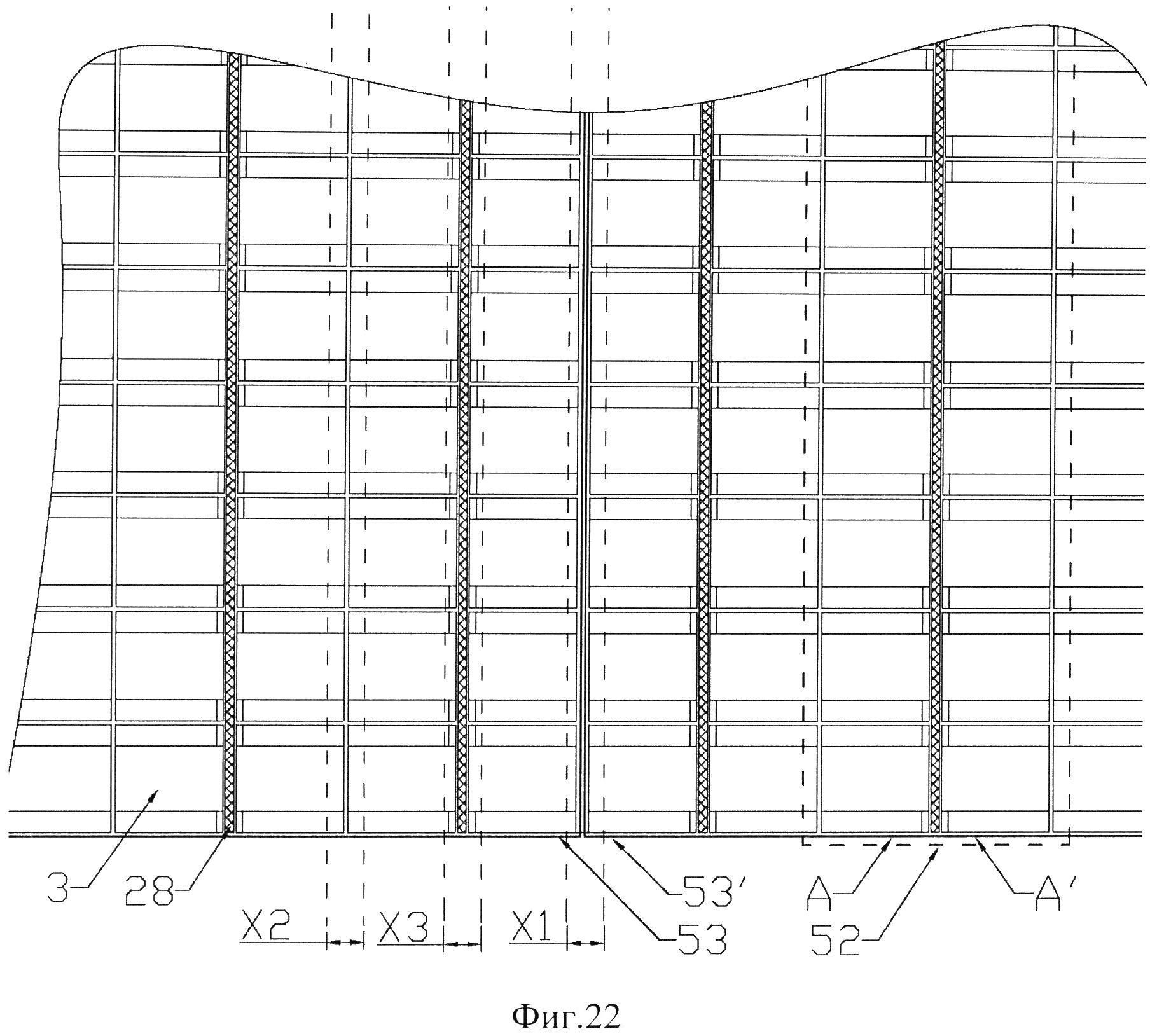
На фиг.22 показано расположение блоков в модуле и сопряжение двух прилегающих модулей.
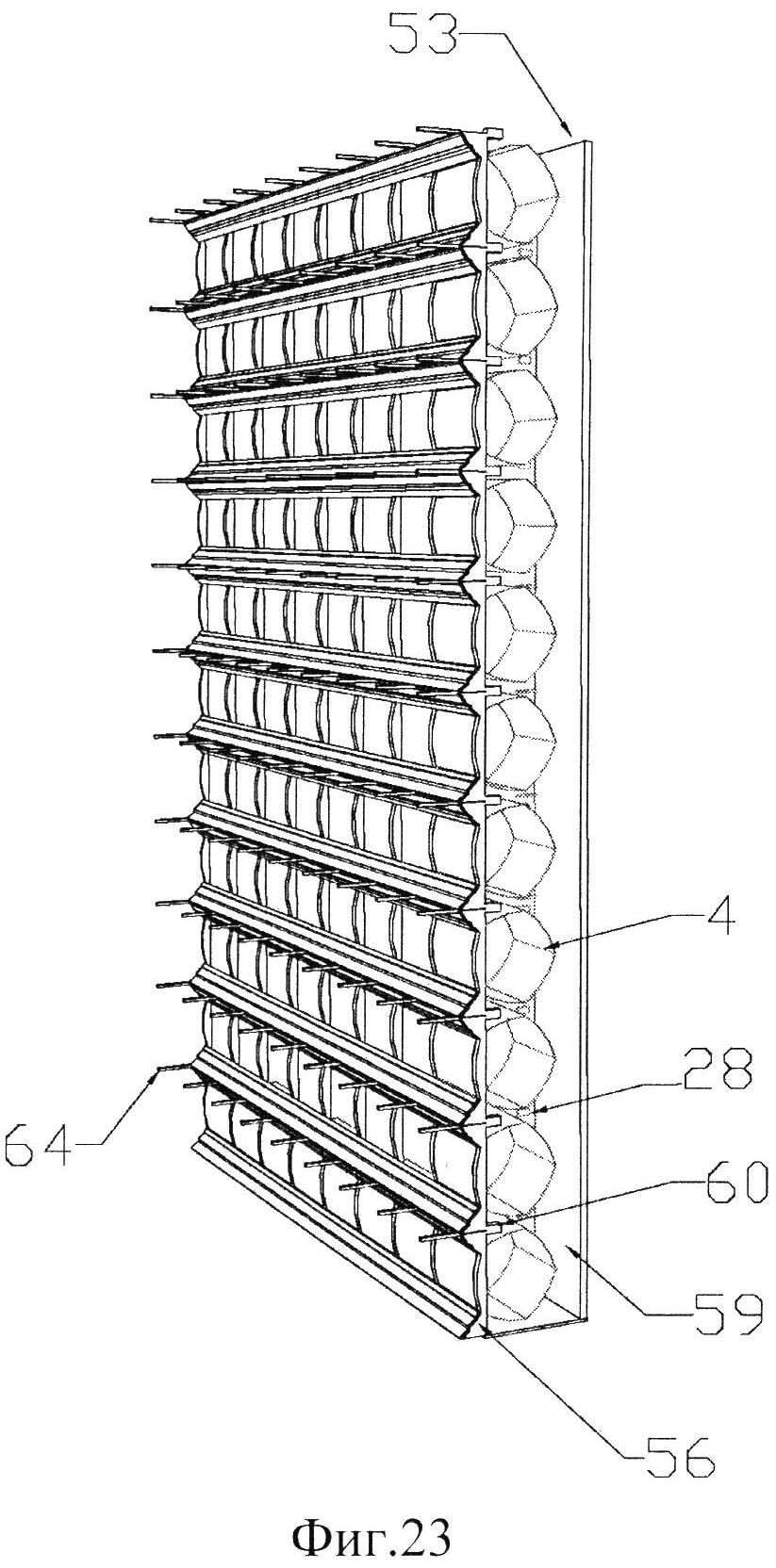
На фиг.23 показан пример исполнения отражающей рефлекторной матрицы модуля.
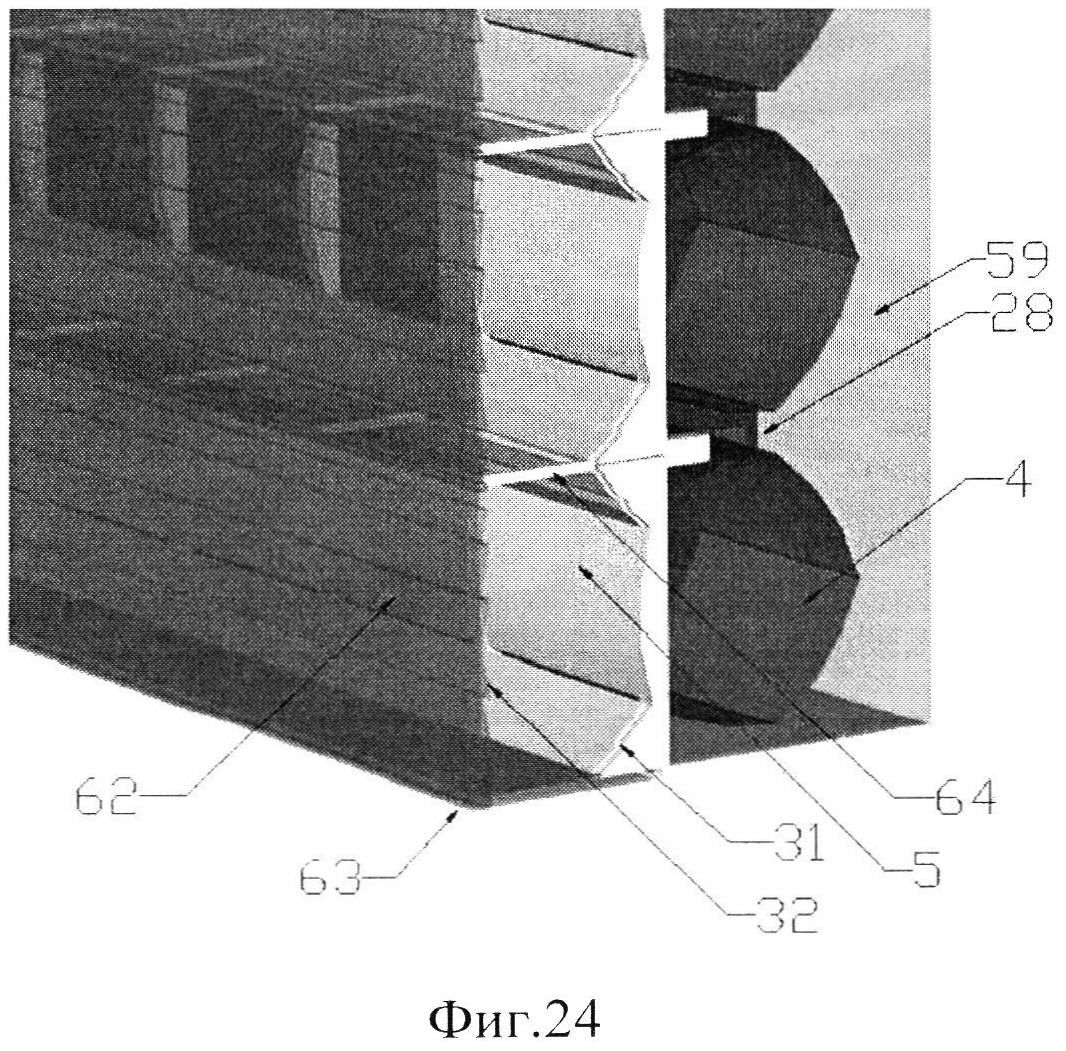
На фиг.24 показано исполнение отдельного фрагмента преломляющей корректирующей матрицы.
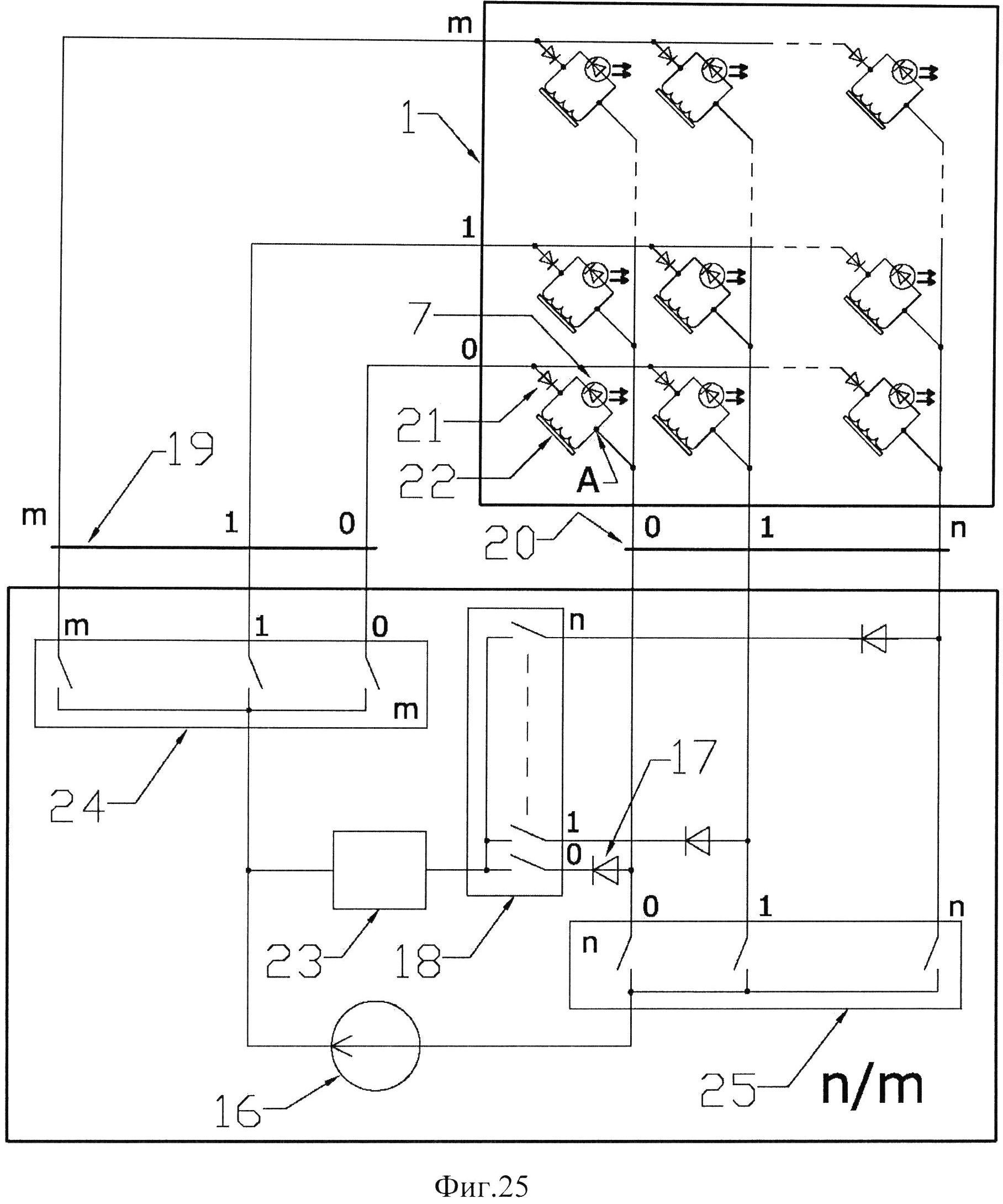
На фиг.25 показана структурная схема системы управления матрицей светомеханических элементов.
Осуществление изобретения
Осуществление предложенного способа формирования растров, способа управления светомеханической матрицей, описание конструкции светомеханического элемента индикации и светомеханического дисплея на их основе демонстрируется фиг.1 - фиг.25.
Фиг.1 - фиг.10 сопровождается описание способа формирования и отображения светомеханического растра.
На Фиг.1 показана матрица 1 растра из (m+1)-строк и (n+1)-столбцов пикселов 2 в виде механических индикаторных элементов 3, подключенная к системе матричного управления n/m; каждый из элементов является активным и передает информацию о текущем значении цвета и яркости одного пиксела растра и в совокупности образуют полный растр. Элементы 3 содержат замкнутую индикаторную поверхность 4 с пятью цветовыми участками 6-1 - 6-5, каждый из которых может быть обращен к стороне наблюдения целиком или частью, представляя из себя в таком случае индикаторную зону 5, отображающую информацию о цвете и уровне яркости пиксела 2 растра.
Для передачи заданного спектрального диапазона отображаемых растров используется цветовая модель RGB, поэтому индикаторные участки элементов кроме черной и белой имеют окраску аддитивных первичных цветов: красного, зеленого и синего.
Таким образом, с помощью одного элемента и одного канала управления этим элементом обеспечивается изменение полного информационного состояния цветового пиксела и отображение каждым пикселом растра наряду с черно-белым любого из первичных аддитивных цветов и их вторичных комбинаций. Например, активируя канал матрицы с адресом n0m0, показанный на фиг.1 пунктирной линией, с его помощью осуществляется последовательное управление положением индикаторной поверхности 4 с заданной дискретностью и последовательный вывод информации о цвете пиксела №0-0 от белого к черному с переходами через основные цвета.
На фиг.2 показана видом сбоку индикаторная поверхность 4 элемента, имеющая пять цветовых участков 6 и обращенная к стороне наблюдения целиком одним из участков 6-1, имеющем в указанном примере белый цвет, формируя тем самым зону индикации 5 эффективной площадью индикации dS, меньшую физической наблюдаемой площади элемента 3, на которую падает внешний световой поток с1Фп, формирующий освещенность участка E=dФп/dS. Отраженный световой поток зоны индикации 5 определяется диффузным отражением от участка 6-1 потока dФп и равен dФo=ko*dФп=ko*E*dS, где ko - коэффициент отражения материала поверхности зоны индикации в спектральном диапазоне, определяемом материалом поверхности. В силу того, что эффективная площадь dS зоны индикации для пятисторонней поверхности 4 существенно меньше наблюдаемой площади элемента 3, имеющей неактивные участки 8, отраженный световой поток значительно ослабляется, что является препятствием для неискаженной передачи светлых участков растра и значительным сужением динамического диапазона яркости растра. Для компенсации данного негативного свойства пятисторонней индикаторной поверхности вводится внутренний источник 7 излучения с управляемой яркостью Вф излучения, а сама поверхность 4 выполнена отражающе-прозрачной. Световой поток излучения dФg зоны индикации 5 определяется диффузным поглощением участка 6-1 светового потока источника, пропорционален dФи≈kп*Bф*dS, где kn - коэффициент поглощения материала поверхности зоны индикации. Суммарный световой поток, испускаемый зоной индикации 5, равен dФ∑=dФo+dФи, и подвержен возможности как начальной установки его значения путем подбора коэффициентов отражения и поглощения поверхности dS, так и оперативного управления путем изменения внутренней яркости Вф источника 7. Величиной суммарного светового потока по отношению к его площади определяется общая яркость растра.
Для показанного положения индикаторной поверхности выводимый растр будет белый, для других положений, также соответствующих обращению к стороне наблюдения целиком одним из участков, цвет растра будет соответствовать цвету участка элемента. При положении индикаторной поверхности, соответствующем обращению к стороне наблюдения одновременно частями цветовых участков, будут формироваться две прилегающие цветовые зоны индикации с различными спектральными светимостями, определяющими результирующий цветовой тон и яркость пиксела.
Таким образом, с помощью одного элемента и одного последовательного канала управления этим элементом обеспечивается отображение каждым пикселом растра наряду с черно-белым любого из первичных аддитивных цветов, двух вторичных аддитивных цветов и их тонов.
На фиг.3 показано положение индикаторной поверхности 4, при котором к стороне наблюдения обращены ее черный и белый участки, что определяет белый цвет выводимого растра, но с меньшей яркостью, т.к. суммарный световой поток dФ∑=dФo+dФи=ko*E*dSБ+kп*Bф*dSБ определяется в основном площадью dSB белого участка поверхности и обеспечивает передачу градации яркости белого растра. За счет возможности управления яркостью Вф внутреннего источника обеспечивается больший диапазон передачи градаций яркости пиксела и растра в целом, особенно в условиях слабой внешней освещенности, когда величина падающего на элемент потока d0n мала. В случае, когда на месте белого участка будет цветовой, взаимное положение черного и цветового участков, или соотношение площадей этих участков, будет определять яркость пиксела и соответствующего цветового растра, если на месте черного будет цветовой, взаимное положение белого и цветового участков или соотношение площадей этих участков, будет определять насыщенность пиксела и соответствующего цветового растра.
Таким образом, с помощью одного элемента и одного последовательного канала управления этим элементом наряду с первичными и вторичными цветами обеспечивается последовательное отображение каждым пикселом растра уровней и оттенков этих цветов.
Индикаторные участки элементов кроме черной 6-2 и белой 6-1 имеют окраску аддитивных первичных цветов: красный участок 6-5, зеленый 6-4 и синий 6-3. Участки образуют замкнутую последовательность, что определяет разделение элементов на виды в зависимости от чередования цветовых участков по отношению как друг к другу, так и к черному и белому, и на комплементарные подвиды в зависимости от направления чередования участков. По видам элементы обладают различной возможностью отображать вторичные цвета и их тоны, по подвидам различной возможностью изменять насыщенность и яркость первичных цветов. В таблице 1 дан перечень возможных видов и подвидов элементов и их характеристики по возможности отображения первичных и вторичных цветов, управления цветовыми тонами, цветовой насыщенностью, яркостью.
|
|
На фиг.4 демонстрируется принцип отображения индикаторной зоной 5 элемента 3 одного их вторичных цветов растра, на примере желтого, и управления цветовым тоном и яркостью.
Индикаторная поверхность 4 обращена к стороне наблюдения частями участков 6-5 и 6-4, образуя два прилегающих участка зоны индикации 5: красный 5-1 с площадью dSK и зеленый 5-2 с площадью dS3, и обеспечивает суммарный световой поток dФ∑=dФок+dФик+dФоз+dФиз=ko*E*(dSK+dSз)+kп*Bф)*(dSк+dSз), спектральная плотность которого и, соответственно, цветовой тон определяется соотношением площадей участков цветовых зон: H≈dSK/dSз (dSз/dSк), меняя которое путем различного положения участков в индикаторной зоне 5, осуществляется управление цветовым тоном, при этом суммарный отраженный поток dФo=dФoк+dФoз и яркость пиксела не изменяются, и управление градациями уровня цветовых тонов с помощью положения индикаторной поверхности 4 невозможно, а становится возможным только управлением яркости Вф внутреннего источника 7, за счет которого происходит изменение суммарного излученного потока dФи=dФик+dФиз.
При использовании в качестве источника излучения трехцветных светоизлучающих диодов (СИД) и трехканального управления элементом обеспечивается возможность формирования полноцветного излученного растра с заданной дискретностью выводимых уровней, используемого в качестве основного. При этом осуществляется полная модуляция цветовых каналов излучения, выводимых на белый участок индикаторной поверхности, выступающий в таком случае в качестве экрана, на который проецируется излучение, а растр аналогичен таковому в светодиодном дисплее.
На фиг.5 демонстрируется принцип формирования суммарного светового потока излучения dФи индикаторной зоной 5 площадью dS, образованной обращенным целиком к стороне наблюдения белым участком 6-1 индикаторной поверхности 4, на который падают световые потоки dФG, dФв трехцветного излучателя 7. Если излученный растр используется в качестве вспомогательного, то осуществляется избирательная модуляция цветового излучения по соответствующим цветовым каналам, выводимого на соответствующий цветовой участок индикаторной поверхности и увеличивающего диапазон уровней яркости и цветовых тонов.
Для увеличения возможности отображения растром вторичных цветов и их тонов, управления насыщенностью и яркостью пятисторонние элементы объединены в группы, результирующее действие которых обеспечивает наиболее благоприятное восприятие градаций яркости растров, тоновых растров и их насыщенности.
На фиг.6 показана конфигурация цветовой группы 9 элементов 3, указанных в таблице 1, имеющего логически завершенный порядок расположения элементов по их типам, обеспечивающий периодичность их размещения в поле растра, снижение строчности тонов черно-белых и первичных растров, снижение строчности и линейчатости вторичных растров и их тонов, повышение визуальной плотности. Это обеспечивается расположением по одной из диагоналей матрицы элементов одного вида с чередованием их по подвиду с периодом Т1, равным два: (-1-1'-1-1'-1-…, -2-2'-2-2'-2-…, -3-3'-3-3'-3…), расположением по вертикали элементов, чередующихся в столбцах по видам или подвидам с периодом Т2, равным три: (-1-2-3-1-2-3-…, -1'-2'-3'-1'-2'-3'-…), при этом обеспечивается горизонтальное чередование каждого из подвидов с периодом шесть: (-1-3'-2-1'-3-2'-1-3'-2-1'-3-2'-…). Очередность следования по видам определяется предпочтениями разработчика системы.
Полная матрица устройства отображения растра формируется заданным числом цветовых групп.
На фиг.7 показано расположение цветовых групп 9 в фрагменте полной матрицы 1 и выполнение условия периодичности Т1 и Т2. Данное расположение необходимо учитывать при формировании размера матрицы унифицированного функционального модуля и подразделении конструктивных блоков на виды, определяющие расположение подвидов элементов.
Градации белого, вторичные и тоновые растры при отображении имеют повышенную заметность строчности их структуры, вызываемую уменьшением эффективной толщины строки при уменьшении площади активных индикаторных зон, для компенсации которой используется противоположное направление чередования индикаторных зон в комплементарных элементах цветовой группы, вытекающее из порядка расположения элементов в цветовой группе и противоположности направления смены участков. На фиг.8 показано отображение градации белого растра, использующее принцип неизменности границ строки. Индикаторные зоны 5 и 5' комплементарных элементов 3 и 3' имеющие одинаковый цвет и площадь, расположены противоположно относительно горизонтальной оси элементов, и изменение их площади при повороте идет в противоположных направлениях 10 и 10' Выполнение этих условий обеспечивает неизменность визуальных границ строки 11 и 11' растра при управлении яркостью, насыщенностью или тоном растра.
На фиг.9. показан принцип улучшения визуального восприятия вторичных растров и их тонов. Порядок расположения элементов в цветовой группе обеспечивает формирование вторичных растров и их тонов с уменьшенной заметностью линейчатости, повышение плотности и дополнительное управление яркостью и насыщенностью. Это достигается различием углов наклона по отношению к физическим строкам основных виртуальных аддитивных линий 12 и 12', образующих вторичные растры, и вспомогательных виртуальных аддитивных линий 13 и 13' увеличивающих плотность вторичных растров 1 и обеспечивающих возможность управления их яркостью и насыщенностью.
Уровень яркости, насыщенность и цветовой тон отраженного растра определяются отношением суммарной площади цветных индикаторных зон в группе,' формирующих заданный тон, к суммарной площади черных и белых индикаторных зон, а внутренний источник излучения с индивидуальной для каждого из элементов яркостью обеспечивает увеличение диапазона градаций этих значений для каждого пиксела и всего растра в целом.
Действие оптического корректора растра основано на перераспределении полного суммарного светового потока, падающего на элемент и испускаемого физической индикаторной зоной элемента, на те направления, которые ограничены неактивными паразитными участками наблюдаемой поверхности элемента, не принимающими участие в формировании сигнала индикации пиксела растра или вносящими помехи в его формирование. Перераспределение может быть осуществлено с помощью отражающих или преломляющих оптических элементов и образованной из них оптической матрицы, располагаемой перед индикаторной матрицей. Фактически корректор перенаправляет весь внешний световой поток, приходящийся на площадь, занимаемую элементом, на поверхность индикаторной зоны, увеличивая освещенность индикаторной зоны, и наоборот, весь испускаемый индикаторной зоной световой поток перенаправляет на всю занимаемую элементом площадь, зрительно увеличивая зону индикации, плотность и равномерность растра.
Другое действие корректора основано на формировании вертикальной диаграммы направленности растра, имеющей уменьшенный угол наблюдения в верхнем секторе наблюдения, что позволяет усиливать световой поток излучения растра за счет уменьшения угла вертикального наблюдения, усиливая и контрастность изображения.
Коррекция выполняется для строк растра с целью увеличения их визуальной толщины и уменьшения загрязненности растра неактивными зонами элементов при отображении первичных, черного и белого растров. При необходимости коррекция выполняется и для столбцов растра с целью визуального уменьшения промежутка между индикаторными зонами.
На фиг.10 показан результат действия полной матрицы корректора:
на левом изображении нескорректированный растр, на правом после коррекции. Корректор обеспечивает увеличенное изображение 5' индикаторных зон 5 по обеим осям, или напротив, уменьшенное изображение 14' горизонтальных промежутков 14 и уменьшенное изображение 15' вертикальных промежутков 15 между индикаторными зонами 5'. Суммарный световой поток растра после коррекции претерпевает незначительное ослабление.
Для осуществления описываемого способа формирования растра используются пятисторонние светомеханические индикаторные элементы с оптическим корректором. Фиг.11 - фиг.17 сопровождается описание светомеханического индикаторного элемента в вариантах его исполнения.
На фиг.11 эскизно показан общий внешний вид индикаторного элемента, содержащего вращающуюся относительно горизонтальной оси индикаторную поверхность 4 с пятью чередующимися цветовыми участками индикации 6-1, 6-2, 6-3, 6-4, 6-5, токоведущее основание 28 с установленными на нем радиодеталями 29, корпусом статора 30, источника света (внутри корпуса 30), рефлекторных 31 и преломляющих 32 оптических корректоров. Индикаторная поверхность выполнена прозрачно-отражающей и обеспечивает диффузное отражение своими цветовыми участками падающего на нее внешнего светового потока и также диффузное излучение внутреннего светового потока, закреплена или выполнена заодно с корпусом 33 ротора, выполненного из прозрачного материала. Один из участков 6-2 поверхности непрозрачный черный, один 6-1 прозрачный белый, три остальные 6-3, 6-4, 6-5 прозрачные и имеют аддитивные цвета цветовой модели RGB.
Действие отражающего (рефлекторного) корректора поясняется рисунком на фиг.12. Ступенчатые рефлекторные поверхности 31 размещены напротив горизонтальных промежутков 8 между индикаторными зонами 5 соседних по вертикали элементов 3 и имеют такой профиль, что отраженный и излученный световой потоки диффузной поверхности индикаторной зоны 5, отражаясь от участков профиля, следует по направлениям лучей зрения 40 и 40', формируя вертикальный угол наблюдения по вертикали 41. Участки профиля рефлекторов 31 имеют размеры и количество, определяемые задаваемым углом зрения 41 и радиусом кривизны R индикаторных участков 5 и 5', обеспечивая допустимую дискретность отображения индикаторной зоны рефлекторными поверхностями 31.
Действие преломляющего корректора поясняется рисунком на фиг.13, где показан ход лучей через участки преломляющей поверхности 32, которая аналогично рефлекторному обеспечивает перенаправление любого из лучей зрения 40 и 40' в диапазоне угла вертикального наблюдения 41 на индикаторную зону 5 и 5' Преломляющие корректоры содержат ступенчатые элементы 43, геометрическими осями расположенные вдоль оси элемента и имеющие поверхности раздела 42 сред, обеспечивающие отклонение проходящих через них лучей 40 и 40' в направлении индикаторной зоны 5 и наоборот. Размеры и количество ступенчатых участков 43 определяются задаваемым углом зрения 41 и радиусом кривизны R участков 5 и 5' индикаторной зоны. Достоинством преломляющего корректора является возможность выполнения его заодно с прозрачной крышкой корпуса устройства.
Принципиально значимым для выполнения индикаторного элемента, имеющего пять последовательных цветовых участков на вращающейся поверхности, является горизонтальное положение оси вращения, в другом случае резко сужается угол наблюдения по горизонтали.
Ротор электропривода выполнен внешним по отношению к статору, магнитопровод ротора выполнен с кольцевым основанием, на котором расположен внутренний ряд зубцов с шагом, соответствующим шагу привода, и числом, кратным пяти. Вращение ротора двунаправленное и ограничено простыми упорами в пределах одного полного оборота, являющимися точками начала и конца исполнения цикла поворота ротора.
Благодаря внутреннему расположению статора обеспечивается возможность использования симметричных сердечников с единственной фазной обмоткой, имеющих сбалансированное действие на ротор благодаря минимальному расстоянию центров симметрии сердечников от оси ротора.
На фиг.14 показана схема электромагнитной системы двухфазного привода индикаторной поверхности. Индикаторная поверхность 4 установлена на роторе привода, имеющего кольцевой магнитопровод 35 с внутренним рядом зубцов 36. Двухфазный статор содержит одностержневые сердечники 27-1 и 27-2, на которых установлены простые рядные обмотки 22-1 и 22-2, и постоянный магнит 34, взаимодействующий с магнитопроводом ротора одним из полюсов. Для компенсации асимметрии действия и пониженной эффективности действия однополюсного сердечника (магнита 34) его положение выбирается таким (см. правый рис.), чтобы обеспечивалось наличие вертикальной составляющей Fy силы Fb магнита 34, направленной перпендикулярно оси О в сторону оси О, и осевой составляющей Fx силы Fb магнита, направленной вдоль оси О в сторону основания 28. Вертикальная составляющая Fy обеспечивает компенсацию силы ft веса ротора и снижение момента трения в опоре ротора, что особенно важно для действия однополюсного магнита 34 в фазе завершения шага ротора, когда составляющая силы Fм магнита (на рис. слева), определяющая крутящий момент ротора, приближается к нулю. При выполнении условия Fy=FT результирующая вертикальной силы равна нулю и не вносит вклад в уменьшение крутящего момента, развиваемого за счет действия силы Fм магнита и силы F сердечника статора. Составляющая Fx, имеющая осевое направление, обеспечивает фиксацию положения ротора вдоль оси О в направлении основания, стабильность его положения относительно статора и, как следствие, степени взаимодействия со статором.
Токоведущее основание 28 используется одно для двух соосных прилегающих элементов, что обеспечивает возможность использования также одного магнита 34, взаимодействующего одновременно с зубцами 36(1) ротора первого элемента и с зубцами 36(2) ротора второго элемента. Такая компоновка целесообразна с экономической точки зрения, что очень важно при большом числе элементов в одном устройстве. Эта точка зрения также не допускает применения классической многообмоточной компоновки двухфазного статора. При однообмоточной возникает проблема размещения сердечников 27, которые для этой цели выполняются одностержневыми, своей магнитной осью максимально приближенные к оси ротора. Тем самым уменьшается действие результирующей силы Fp на ось ротора, являющейся векторной суммой составляющих ±Fr и ±Fп силы, действующей со стороны полюсных зубцов 37 статора на зубцы 36 ротора (рис. слева). Это уменьшает радиальные нагрузки на ось привода и снижает момент трения, обеспечивая максимальную чувствительность привода.
Работа электромагнитной системы привода с двухфазным управлением и использованием постоянного магнита для фиксации положения и в качестве третьего полюса статора по своей сути не отличается от работы реактивного шагового двигателя. В исходном положении сигнал в обмотках отсутствует и ротор зафиксирован магнитным полем полюса S магнита 34, воздействующего на тот из зубцов 36, который находится напротив магнита. Если первой будет подана команда управления на обмотку 22-1 статора, то действие магнитного поля сердечника 27-1 обеспечит направление силы F, действующей по касательной на зубцы 36 магнитопровода ротора и создающей крутящий момент против часовой стрелки, обеспечивающий первый поворот ротора на угол, равный одной трети полного шага привода, до совпадения центров зубцов. Если первая команда управления подается на обмотку 22-2 статора, магнитное поле сердечника 27-2 обеспечит направление силы -F и первый поворот на одну треть шага в направлении по часовой стрелке. Второй поворот также на угол, равный одной трети полного шага привода, обеспечивается при завершении управляющего тока в первой обмотке и его действием во второй. Третий поворот на угол, равный одной трети полного шага привода, обеспечивается по окончании действия управляющего тока во второй обмотке действием силы со стороны постоянного магнита 34, заканчивая исполнение полного шага ротора. При полном трехфазном управлении вместо магнита 34 используется третий сердечник с обмоткой.
На фиг.15 эскизно показан внешний вид корпуса 30 элемента с размещенным внутри него светоизлучающим диодом 7, вместе установленных на токоведущее основание 28, и его расположение относительно индикаторной зоны 5 поверхности 4. Корпус 30 содержит основание 44 с гнездами 45 установки магнитопроводов сердечников статора с выступающими зубцами 37, опорные валы 48-1 и 48-2 для установки ротора, окно 49 светодиода 7, обращенное в сторону индикаторной зоны 5 поверхности 4. Корпус 30 может быть выполнен из прозрачного материала для лучшего распространения излучаемого светового потока d0 и меньшей зависимости от диаграммы направленности источника 7. Светодиод 7 в случае одно или двухфазного управления элементом используется одноканальный и своими выводами 46 соединен с выводами 47 одной из обмоток статора с помощью дорожек токоведущего основания 28, в случае трехфазного управления светодиод трехканальный и своими выводами подключен к обмоткам поканально параллельно. В обоих случаях для питания светодиода используются токи самоиндукции (экстратоки) обмоток при соответствующем формировании раздельных команд управления.
Как частный случай используется привод с одной обмоткой и однофазным управлением, обеспечивающим движение ротора только в одном направлении, которое поэтому будет являться циклическим. Данный режим оправдан с экономической точки зрения и требует принятия мер по обеспечению в системе обратной связи по положению ротора, по меньшей мере, для одного из шагов привода, соответствующего началу отсчета - "нулевого" шага. Это условие обеспечивается отличающимися параметрами фиксации ротора для данного шага. Чтобы не вносить при этом дисбаланс в магнитную систему ротора, используется дополнительный магнит фиксации существенно меньшей силы, устанавливаемый снаружи ротора и взаимодействующий с дополнительным внешним зубцом магнитопровода ротора. При этом действие одного магнита распространяется одновременно на четыре прилегающих элемента.
Электромагнитная схема электропривода с однофазной обмоткой, дополнительным магнитом и внешним зубцом показана на фиг.16. Магнитопровод ротора имеет кольцевое основание 35, на котором располагается внутренний ряд зубцов 36. Магнитопровод 27 статора имеет простую полностью симметричную стержневую конструкцию и содержит два полюса N-S, на которых расположены зубцы 37, взаимодействующие с внутренним рядом зубцов 36 ротора, обеспечивая возникновение силы F, всегда направленной только в одну сторону и создающей вращающий момент ротора. На внешней стороне основания 35 ротора расположен дополнительный зубец 39, взаимодействующий своей боковой гранью с дополнительным магнитом 50, размещенным в гнезде оснований 28, в результате чего в данном положении ротора обеспечивается дополнительный фиксирующий момент, для преодоления которого требуется большая величина мощности управляющего воздействия. Таким образом, обеспечивается наличие обратной связи в системе по положению ротора, принятого за "нулевое", для которого характерен больший уровень управляющего воздействия. Если в данном положении на ротор воздействовать стандартным уровнем, его будет недостаточно для начала исполнения шага, и ротор останется в этом положении до момента прихода увеличенного воздействия. Положение дополнительного магнита 50 обеспечивает возможность использования его одновременно для двух прилегающих соосных пар элементов.
Для дальнейшего упрощения системы Магнитопровод ротора выполняется с дополнительным внешним рядом зубцов, количество и шаг расположения которых соответствуют основному внутреннему ряду, магнит статора выносится наружу ротора, а направление его магнитных силовых линий направлено вдоль оси ротора и действует на боковые поверхности внешнего ряда зубцов, на боковой грани одного из которых имеется дополнительный зубец, обеспечивающий дополнительное усилие фиксации, определяющее положение "нулевого" шага. Действие одного магнита распространяется одновременно на четыре сопряженных элемента, при этом отличия в величине воздействия на ротор, находящийся выше магнита, по отношению к ротору, находящемуся ниже магнита, не наблюдается, т.к. действие силовых линий магнита направлено вдоль оси роторов, и не складывается с действием силы тяжести роторов, сохраняя равенство моментов трения для любого из них. Однако такая особенность компоновки не обеспечивает компенсации асимметрии действия магнита в радиальном направлении и веса ротора, что негативно сказывается на чувствительности и точности работы привода. Целесообразность использования такого варианта привода может быть оправдана только экономической стороной постановки вопроса.
Электромагнитная схема электропривода с однофазной обмоткой, дополнительным внешним рядом зубцов магнитопровода ротора и внешним магнитом статора показана на фиг.17.
Магнитопровод 35 ротора содержит внешний ряд зубцов 38, взаимодействующих с магнитом 34 статора, вынесенного для этого наружу ротора и установленного в гнездо основания 28 так, что своими полюсами воздействует с силой Fm одновременно на две пары соосных прилегающих роторов (рис. справа) по отношению к зубцам 38(1), 38(2), 38(3), 38(4) внешнего ряда. Дополнительный выступ 51 на боковой поверхности магнитопровода 35 ротора располагается со стороны основания 28 и обеспечивает повышенный момент фиксации в одном из положений ротора, величина которого определяется расчетной высотой выступа 51 над поверхностью основания 35 в сторону магнита 34.
Фиг.18 - фиг.20 сопровождается описание способа раздельного управления механическими и световыми элементами светомеханической матрицы и способа уплотненного управления матрицей с использованием двойного импульса управляющей команды.
Способ управления светомеханическим элементом, содержащим параллельно соединенные светоизлучающий диод (СИД) и обмотку электропривода, задемпфированную импульсным диодом, основан на существенно большей, три и более вольт, величине прямого напряжения перехода СИД по сравнению с этой величиной у импульсного демпфирующего диода, у которого прямое напряжение шесть десятых вольта. При одновременном подключении к обмотке СИД и импульсного диода ток самоиндукции обмотки (экстраток) течет через диод с меньшим потенциалом перехода, т.е. через импульсный. При отключении его от обмотки ток будет протекать через СИД, вызывая его свечение. Так как амплитуда тока СИД значительно меньше амплитуды рабочего тока электропривода, то привод на ток через СИД не реагирует.Таким образом, переход с управления СИД на управление электроприводом осуществляется простым подключением к параллельно соединенным СИД и обмотке привода демпфирующего диода, имеющего меньший порог открывания по сравнению с СИД.
На фиг.18 представлена упрощенная схема включения обмотки 22 электропривода и источника света, в качестве которого используется СИД 7. Схема содержит три контура протекания тока, каждый из которых протекает через обмотку 22: в контурах I и II происходит формирование суммарного тока управления электроприводом светомеханического элемента, а в контурах I и III формирование суммарного тока управления светового излучателя светомеханического элемента. Общее питание осуществляется от источника 16 импульсной ЭДС через ключ коммутатора строк 24 по токоведущим линиям шины 19 строк и шины 20 столбцов. При замкнутых контактах выключателя 18 контур II является замкнутым и к обмотке 22 подключен демпфирующий диод 17. Источник 16 импульсной ЭДС возбуждает в контуре I ток Iк1 величиной, являющейся функцией длительности t импульса и амплитуды Е импульса. После завершения тока Iк1 в контуре I, обеспечившего накопление энергии в обмотке 22, при отключении ключа 24 ток обмотки начинает течь в контуре II демпфирующего диода 17, тем самым продолжая формирование тока Iк2 питания обмотки 22. При этом ток в контуре III не протекает благодаря более высокому потенциалу включения перехода СИД 7, зашунтированного диодом 17. При разомкнутых контактах выключателя 18 цепь демпфирующего диода 17 разорвана и после завершения тока 1к1 в контуре I ток обмотки начинает течь в контуре III, формируя ток питания Iк3 СИД 7. Так как порог срабатывания электропривода существенно выше порога включения СИД, то взаимное влияние управляющих воздействий исключается, и становится возможным раздельное во времени управление световым и механическим элементами по единым токоведущим линиям. Отсутствие в цепях управления активных сопротивлений обмотки и СИД обеспечивает высокий КПД системы.
Для возможности уплотнения во времени сигналов управления механическими элементами матрицы и уменьшения общего времени управления матрицей используется трехтактный режим управления в каждой активной фазе. Так как инерционность механической системы привода в процессах преобразования энергии высока, а скорость завершения процессов низкая, то длительность управляющего воздействия может иметь существенно меньшее значение по сравнению с длительностью исполнения процессов механической системой. Принимая во внимание крайне малые величины требуемых крутящих моментов для вращения индикаторной поверхности, не представляется целесообразным непрерывное воздействие сил, обеспечивающих постоянство ускорения и преодоление момента инерции ротора с максимальной скоростью. Более существенное значение имеет общее время управления матрицей, которое в большей степени связано с быстротой распределения управляющих сигналов в матричной системе, нежели со скоростью завершения процесса управления каждого из элементов матрицы.
Делая процесс перемещения ротора на определенном участке траектории поворота неуправляемым, и оставив управляемыми процессы начального ускорения, завершающего ускорения и демпфирования механических колебаний, становится возможным разделить надвое импульс команды управления, и в образовавшемся промежутке между импульсами обеспечить последовательную передачу команд управления другими элементами.
Принцип такого управления, основанный на сообщении ротору разгонного импульса момента за счет действия силы магнитного поля расчетной величины со стороны статора в первом такте управления, последующего инерционного перемещения во втором такте за счет приобретенной кинетической энергии в первом такте, и завершение фазы управления в третьем такте, продемонстрирован на фиг.19.
На рис. а фиг.19 представлена диаграмма однотактного исполнения фазового перехода dS ротора. Началу возмущающего воздействия в момент времени to соответствует исходное взаимное положение зубцов 36 магнитопровода ротора и 37 магнитопровода статора, характеризующее неравновесное состояние системы, в которой имеется воздействие I(t), и которое продолжается на всем протяжении процесса уравновешивания системы при изменении ее фазового состояния до момента времени t4. Характер происходящих под действием управляющего тока I(t) процессов преобразования энергии, вызывающих ускорение a(t) и постоянное нарастание скорости v(t) до точки равновесия системы в момент времени t3 совпадения центров зубцов 36 и 37, относительно которой совершается дальнейший колебательный процесс уравновешивания до окончания действия тока I(t) момент времени t4, является стандартным для шаговых двигателей, когда требуется отбор мощности с вала ротора.
На рис.б фиг.19 представлена диаграмма трехтактного исполнения фазового перехода dS в случае, когда управляющий сигнал состоит из двух импульсов тока I1(t) длительностью τ1 и I2(t) длительностью τ2, разделенных промежутком τ3. Данный режим целесообразен именно в системе, где не требуется отбор мощности с вала ротора и не требуется предельной скорости фазовых переходов.
Во время действия первого импульса I1(t) возмущающего воздействия происходит накопление кинетической энергии, пропорциональной скорости v1(t) ротора, за счет полученного ротором ускорения a1(t), достаточной для инерционного преодоления промежутка dS-1, меньшего dS на заданную величину, с уменьшающейся скоростью v3(t). В момент времени t2 начала второго импульса I2(t) скорость v3(t) имеет еще положительное значение, и в промежутке времени t2-t3 ротору сообщается дополнительное ускорение a2(t) для уверенного завершения перехода со скоростью v2(t). Колебательный процесс окончательного уравновешивания системы носит аналогичный характер, но с меньшими амплитудами и временем.
Полная длительность TdS3 трехтактной команды управления больше длительности TdS1 однотактной в силу меньшей результирующей скорости выполнения процессов в механической системе. Вместе с тем полная длительность активных фаз в тактах τ1 и τ2 управляющего воздействия существенно, на 1-3 порядка, меньше длительности промежуточной неактивной фазы τ3, во время которой обеспечивается высвобождение канала и линий управления системой для передачи сигналов управления остальными элементами матрицы, возможное число которых соответствует целому отношению τ3/τ1, и определяет размер группы уплотнения сигналов.
На фиг.20 представлена диаграмма распределения сигналов в группах уплотнения. В качестве примера приводится управление матрицей из 15 элементов, на которые действуют сигналы команд управления в каналах 1-15, объединенные в три связанные группы Г1-Г3, число каналов в которых равно наименьшему целому отношению промежутка Tг между передними фронтами импульсов управления I1(t) и I2(t) к длительности первого импульса I1(t).
Включение текущего канала в группе обеспечивают задним фронтом первого импульса I1(t) предыдущего включенного канала в группе. Так, если текущим считать канал 2 в группе Г1, то его включение произойдет в момент времени t2, совпадающий с задним фронтом первого импульса I1(t) сигнала управления, действующего в канале 1 группы Г1, включенного предыдущим в этой группе.
Включение первого канала в текущей группе обеспечивают задним фронтом второго импульса последнего канала в предыдущей группе. Так, если текущей считать группу Г2, то включение канала 6, первого в ней, произойдет в момент времени t3, совпадающий с задним фронтом второго импульса I2(t) сигнала управления, действующего в последнем канале 5 группы Г1.
Общее время управления матрицей Тм равно промежутку времени между передним фронтом первого импульса первого включенного канала в первой группе и задним фронтом второго импульса последнего канала в последней группе. Для неуплотненного управления полное время управления матрицей составило бы 15 полных промежутков Тш исполнения шага, что существенно больше времени уплотненного управления.
Фиг.21 - фиг.25 сопровождается описание предложенного светомеханического дисплея.
Устройство, в котором используются описанные выше способы и светомеханический индикаторный элемент, представляет из себя светомеханический дисплей, состоящий из несущего каркаса, обеспечивающего конструкционную прочность, массива функционально законченных модулей, подключенных к сети распределения сигналов управления, и электронный блок матричного управления и коммутации. Каждый из модулей состоит из группы идентичных конструкционных блоков, имеет корпус, заднюю защитную крышку и переднюю прозрачную крышку, обеспечивающие пылевлагозащищенность.
Конструкционный блок объединяет два ряда элементов, образующих два комплементарных столбца и установленных на противоположных поверхностях токоведущего пластинчатого основания, но котором имеются элементы установки корректирующей оптической матрицы, элементы крепления на корпус модуля, гнезда для установки постоянных магнитов прилегающих пар элементов. Общий компоновочный принцип блока эскизно показан на фиг.21.
На токоведущем основании 28 из двустороннего фольгированного материала с обеих сторон располагаются светомеханические элементы 3, образуя два вертикальных ряда А и А' элементов по их комплементарным подвидам. Крепление оснований 28 блоков 52 на основание 59 корпуса модуля (показан фрагмент) осуществляется перпендикулярно к плоскости основания 59, и они служат дополнительным элементом конструкционной жесткости модуля, позволяющей воспринимать через упоры 64 ветровые нагрузки Fв, действующие на поверхность передней стенки крышки 62 модуля, передавать их на основание 59, а от него через связи 66 (показаны условно) на несущее основание 65 дисплея. Так как количество блоков в дисплее значительно, то обеспечивается высокая суммарная конструкционная жесткость, позволяющая равномерно воспринимать ветровые нагрузки Fв.
Расположение блоков в модуле и сопряжение двух прилегающих модулей показано на фиг.22. Блоки 52 элементов 3, смонтированных на токоведущем основании 28, располагаются вертикально с межблочным промежутком Х2, образуя функционально законченный модуль 53, имеющий заданное количество столбцов А и А' Соседние модули 53 и 53' имеют межмодульный промежуток XI с размерностью, сопоставимой с межрядным промежутком Х3, величина которого определяется в основном толщиной основания 28. Направление смены индикаторных участков в столбцах А и А' противоположно.
Корпус модуля имеет вибропоглощающее основание, боковые стенки, отсек платы управления, узлы монтажа конструкционных блоков, узлы фиксации передней крышки, профиль примыкания и уплотнения задней крышки, в свою очередь имеющей профиль уплотнения передней прозрачной ветрозащитной крышки по всему периметру их взаимного примыкания, обеспечивающего изоляцию внутреннего объема модуля и пылевлагозащищенность.
На фиг.23 эскизно показан пример исполнения матрицы рефлекторных корректоров и ее размещения в функциональном модуле. Отражающая рефлекторная матрица выполняется в виде цельнолитого (штампованного) блока 56, размерность которого в предельном случае соответствует размерности модуля, и крепится на основаниях 28 блоков с помощью узлов крепления 60 типа защелки. Благодаря своей цельной решетчатой конструкции несущее основание матрицы 56 служит также дополнительным узлом фиксации и позиционирования оснований 28 блоков по горизонтали, что упрощает выполнение узлов крепления блоков на основании 59 корпуса модуля. Упоры 64 служат для передачи нагрузок от передней стенки крышки, вызываемых ветровым воздействием, на основание 28 блока, а от него на основание 59 модуля 53.
На фиг.24 показано исполнение преломляющей корректирующей матрицы и ее положение относительно остальных узлов в модуле (фрагмент). Так как для пылевлагозащиты модуля используется прозрачная крышка, то преломляющая коллиматорная матрица 32 для повышения технологичности производства выполняется на внутренней поверхности передней стенки 62 крышки 63 модуля, при этом для изготовления используется материал с требуемым коэффициентом преломления. Коллиматор 32 совместно с рефлектором 31 обеспечивает максимальный эффект коррекции отображения индикаторной зоны 5 поверхности 4. Наличие массива упоров 64 позволяет через основания 28 конструкционных блоков на основание 59 модуля равномерно передавать нагрузки, действующие на поверхность крышки 62, что делает возможным герметичное исполнение модуля и предкоррекцию давления для компенсации тепловой разницы давления в герметичном отсеке модуля.
Для возможности принципиально простого переключения группы светомеханических элементов матрицы из режима управления электроприводами в режим управления световыми излучателями система матричного управления светомеханического дисплея содержит схему адресного отключения демпфирующих диодов.
На фиг.25 показана структурная схема системы управления матрицы 1, состоящей из мультиплексорных диодов 21, обмоток 22 электромеханических элементов и СИД 7, содержащая три канальных коммутатора: аналоговый демультиплексорный коммутатор 24 строк, аналоговый демультиплексорный коммутатор 25 столбцов, аналоговый мультиплексорный коммутатор 18 демпфирующих диодов 17, анодами подключенных к выходам ключей коммутатора 25.
С помощью коммутаторов 24 и 25 осуществляется адресная накачка энергии в обмотку 22 от источника 16 ЭДС, а с помощью коммутаторов 24 и 18 осуществляется адресное отключение демпфирующих диодов 17, обуславливая протекание накопленного обмоткой 22 тока через светодиод 7, соответствующий текущему адресу, определяемому номерами включенных каналов строк и столбцов. Так, если оказались включены ключ "0" коммутатора 24 и ключ "0" коммутатора 25, то произойдет накачка энергии в обмотку 22 элемента с адресом "0-0", и если ключ "0" коммутатора 18 будет разомкнут, то накопленный ток протечет через СИД 7 с адресом "0-0", при замкнутом ключе "0" коммутатора 18 ток протечет через демпфирующий диод 17, завершая процесс управления электроприводом с адресом "0-0". Демпфирующий диод 17 используется один на все элементы столбца, к которому он подключен, что существенно упрощает построение системы. Схема 23 задержки порога открывания диодов 17 обеспечивает возможность частичного отвода тока в узле А через светодиоды 7 при включенном ключе коммутатора 18, вызывая их свечение одновременно с работой электропривода 22. Этим осуществляется вспомогательная подсветка матрицы во время процессов управления электроприводами.
Электромеханический привод индикаторной головки элемента растрового изображения (варианты) и электромеханический дисплей, выполненный с использованием указанного привода
Способ перемещения полотна с нанесенными на него изображениями для их последовательной демонстрации с одной или более сторон наблюдения и устройство для его осуществления
Высокоточный однофазный шаговый электромеханический реактивный привод многопозиционной индикаторной головки элемента растрового изображения
Козырьковый унитаз, литой корпус унитаза и устройство для вентиляции унитаза (варианты)
Электромеханический привод индикаторной головки элемента растрового изображения (варианты) и электромеханический дисплей, выполненный с использованием указанного привода
Способ перемещения полотна с нанесенными на него изображениями для их последовательной демонстрации с одной или более сторон наблюдения и устройство для его осуществления
Высокоточный однофазный шаговый электромеханический реактивный привод многопозиционной индикаторной головки элемента растрового изображения
Козырьковый унитаз, литой корпус унитаза и устройство для вентиляции унитаза (варианты)

