Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛА
Вид РИД
Изобретение
Предлагаемое изобретение относится к измерительной технике и может быть использовано в любой области, где необходимо определить скорость движущегося объекта и расстояние до него, в частности для контроля рельефа подстилающей поверхности и управления режимом посадки летательного аппарата.
Известен способ определения дальности до удаленного объекта путем зондирования его лазерным импульсом, приема отраженного объектом импульса излучения и определения временного интервала между моментами излучения зондирующего импульса и приема отраженного объектом импульса, по которому судят о дальности до объекта [1].
Недостатком этого способа является невозможность измерения скорости цели.
Наиболее близким по технической сущности к предлагаемому способу является способ определения дальности и/или скорости удаленного объекта [2], заключающийся в многократном зондировании объекта импульсами лазерного излучения, приеме и регистрации отраженного объектом сигнала с его привязкой к импульсам стабильной тактовой частоты, разделяющим время на нумерованные тактовые интервалы, отсчитываемые от момента излучения зондирующего импульса и образующие тем самым ячейки дальности, и статистической обработке зарегистрированных данных. Согласно указанному способу производят многократное моноимпульсное зондирование объекта путем посылки на него серии n лазерных импульсов и определения в каждом i-м зондировании временного интервала ti между моментами излучения лазерного импульса и приема отраженного объектом излучения, при каждом зондировании определяют и регистрируют значения моментов текущего времени Ti, в которые производят посылки лазерных импульсов, и измеренных интервалов ti в серии n зондирований и определяют скорость объекта по формуле:
 ,
,
где
V - скорость объекта;
Ri=с·ti/2 результат измерения дальности до объекта в i-м зондировании;
с - скорость света,
задают момент времени T*, к которому должен быть привязан отсчет дальности, и определяют значение дальности до объекта в этот момент по формуле:
R*=R0+V(T*-T1),
где
R* - результат определения дальности до объекта в момент времени Т*;
 ;
;
При использовании этой процедуры для измерения параметров траектории летательного аппарата (ЛА) она реализуема только на малых и средних высотах полета ЛА, поскольку требует достоверности измерений при каждом зондировании объекта. Портативные измерители дальности и скорости не обладают достаточным энергетическим потенциалом для проведения таких измерений на больших высотах. При большой дальности до объекта величина принимаемого сигнала становится соизмеримой с амплитудой шумов и прием каждого отраженного импульса с заданной вероятностью становится невозможным. В этом случае измерение скорости по указанному алгоритму приводит к недостоверным результатам.
Задачей изобретения является обеспечение измерений с борта летательного аппарата его высоты и вертикальной составляющей скорости как в стационарном полете, так и при взлете и посадке в широком диапазоне высот и режимов подъема и снижения.
Указанная задача решается за счет того, что в известном способе измерения высоты и/или вертикальной скорости ЛА, заключающемся в многократном зондировании объекта импульсами лазерного излучения, приеме и регистрации отраженного объектом сигнала с его привязкой к импульсам стабильной тактовой частоты, разделяющим время на нумерованные тактовые интервалы, отсчитываемые от момента излучения зондирующего импульса и образующие тем самым ячейки дальности, и статистической обработке зарегистрированных данных, в рабочем режиме полета ЛА при выполнении им полетного задания, а также при наборе высоты и снижении проводят серию зондирований способом некогерентного накопления, а именно, накапливают массив принятых реализаций отраженного сигнала в каждой ячейке дальности до тех пор, пока величина накопленного массива не превысит пороговое значение, затем по заранее установленному критерию, например по максимуму коэффициента корреляции накопленного массива принятых реализации с массивом предварительно оцифрованного зондирующего импульса, определяют порядковый номер Р ячейки дальности, к которой относится отраженный сигнал, и определяют дальность R до объекта по формуле R=cPΔt/2, где с - скорость света; Δt - длительность тактового интервала, а в режимах взлета и посадки отключают режим некогерентного накопления и включают моноимпульсный режим измерения дальности и скорости, в процессе которого производят серию зондирований объекта не менее двух раз, при каждом i-м зондировании определяют время его приема ti, вычисляют дальность до объекта Ri=cti/2, где с - скорость света, и определяют дальность до объекта и его относительную скорость путем линейной интерполяции результатов измерений в виде R(t)=Vt+R0, где R(t) - текущая дальность до объекта; t - текущее время в данной серии; V - оценка скорости; R0 - оценка дальности до объекта в момент времени t=0.
Коэффициент корреляции можно определять по формуле  , где j - порядковый номер ячейки дальности; Pmax - максимальное число ячеек дальности, соответствующее диапазону измерения дальности; {S0j} - массив выборочных значений зондирующего импульса; {Sj} - массив накопленных значений принятых реализаций; р - текущее количество шагов при пошаговом сдвиге {Sj}.
, где j - порядковый номер ячейки дальности; Pmax - максимальное число ячеек дальности, соответствующее диапазону измерения дальности; {S0j} - массив выборочных значений зондирующего импульса; {Sj} - массив накопленных значений принятых реализаций; р - текущее количество шагов при пошаговом сдвиге {Sj}.
Оценки дальности до объекта R0 в начальный момент измерения T1 и скорости объекта V можно формировать по формулам:


где
R0 - оценка дальности до объекта в момент времени t=0;
V - оценка скорости объекта;
Ri=c·ti/2 - результат измерения дальности до объекта в i-м зондировании;
Ti - моменты времени, в которые произведены замеры дальности Ri;
с - скорость света,
m - количество замеров дальности в серии.
ti - задержка между моментами излучения лазерного импульса и приема отраженного объектом излучения в i-м зондировании.
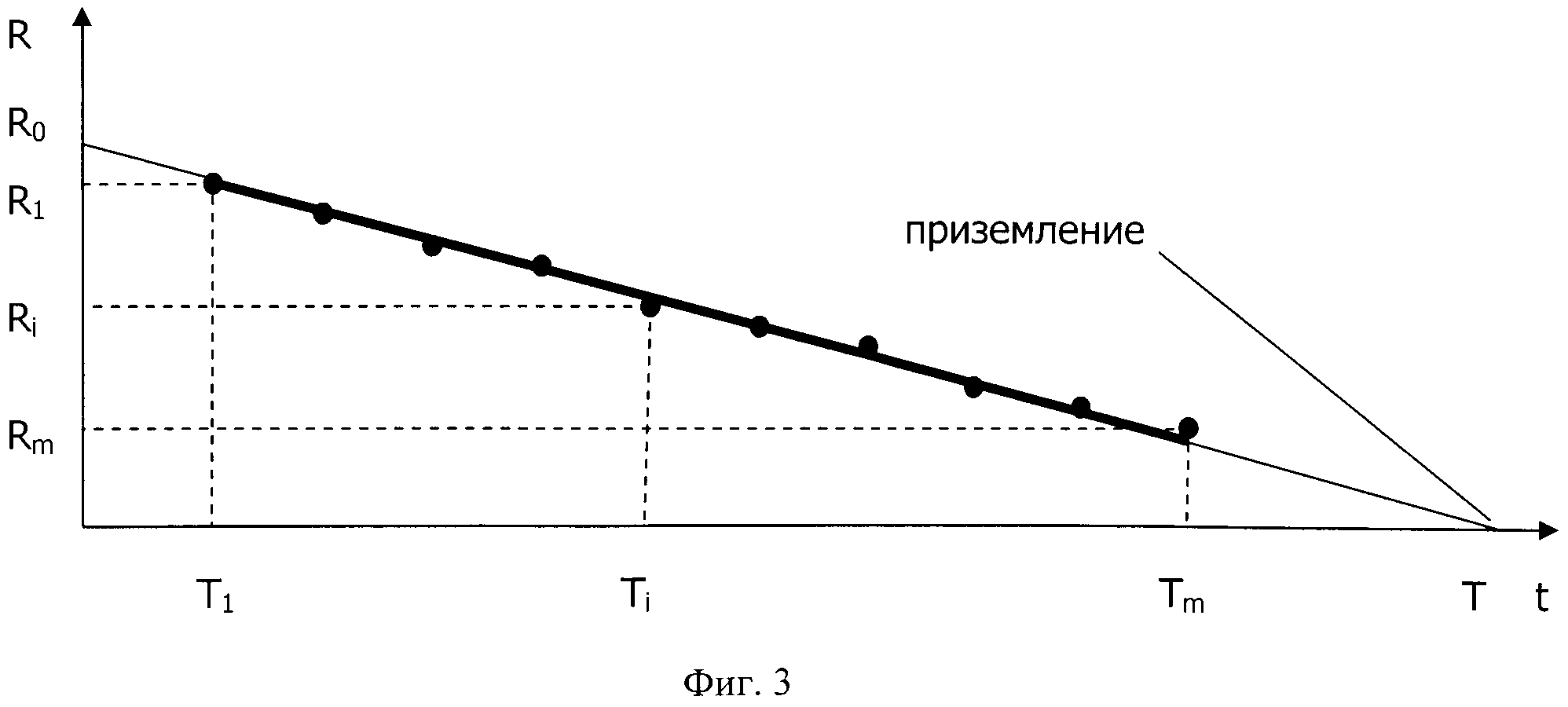
На фиг. 1 представлен профиль полета летательного аппарата. На фиг. 2 и фиг. 3 - процесс измерения дальности и скорости соответственно в режимах взлета и посадки.
При взлете летательного аппарата автоматически или по команде с пункта управления включают моноимпульсный режим работы измерителя дальности и скорости. Через время T1 после отрыва от земли производится измерение вертикальной дальности R1, а затем производится серия замеров дальности. Общее количество замеров m определяется требованиями по частоте обновления информации и точности измерений [5]. В каждой серии определяют дальность до объекта и его относительную скорость путем линейной интерполяции результатов измерений в виде R(t)=Vt+R0, где R(t) - текущая вертикальная дальность до объекта; t - текущее время в данной серии; V - оценка скорости; R0 - оценка дальности до объекта при t=0 (фиг. 2). Значения V и R0 можно определять по методу наименьших квадратов, то есть по формулам (1) и (2).
В рабочей фазе полета ЛА, когда он находится в состоянии набора высоты, горизонтального полета в соответствии с полетным заданием и снижения, по команде от автопилота или с наземного пункта управления включают режим измерений по методу некогерентного накопления [3]. Зондирование подстилающей поверхности также производят сериями, но при этом определяют уровень сигнала во всех ячейках дальности и накапливают полученные значения в каждой ячейке дальности до тех пор, пока накопленное значение не достигнет уровня, достаточного для точной фиксации накопленного массива на временной шкале. Затем определяют порядковый номер Р ячейки дальности, в которой зафиксировано положение накопленного массива, и определяют дальность R до подстилающей поверхности по формуле R=cPΔt/2, где с - скорость света; Δt - длительность тактового интервала, соответствующего протяженности ячейки дальности.
При посадке ЛА вновь включают моноимпульсный режим измерений, как описано выше. На фиг. 3 этот процесс показан от начала измерений в этом режиме T1 до последнего зондирования в момент Tm. Момент приземления Т=-R0/V может быть определен из зависимости R(t)=Vt+R0. Время от последнего зондирования до приземления может быть определено из соотношения R0/T=Rm/(T-Tm), откуда, с учетом Т=-R0/V,
Tп=(T-Tm)=Rm/V.
Расстояние до точки приземления по глиссаде Rп=VЛАТп, где VЛА - курсовая скорость летательного аппарата.
Данный способ позволяет:
- Увеличить измеряемую высоту летательного аппарата до 1000-2000 м.
- Уменьшить минимальную измеряемую высоту до 2 м.
- Обеспечить минимальный период обновления информации порядка 1 с на больших высотах и до 0,1 с - на малых.
- Обеспечить минимальную ошибку измерения скорости 0,01-0,1 м/с в зависимости от длительности серии зондирований и количества замеров в серии.
- Интерполировать результаты к любому моменту периода измерений или экстраполировать их на заданное время вперед, в том числе определять время приземления.
Эти выводы подтверждены испытаниями макетных образцов высотомера-скоростемера [4, 5]. Тем самым подтверждено решение поставленной задачи - обеспечение измерений с борта летательного аппарата его высоты и вертикальной составляющей скорости как в стационарном полете, так и при взлете и посадке в широком диапазоне высот и режимов подъема и снижения.
Источники информации
1. В.А. Смирнов «Введение в оптическую радиоэлектронику». Изд. «Советское радио», Москва, 1973 г., с. 189.
2. Способ определения дальности и/или скорости удаленного объекта.
Патент РФ №2378705 - прототип.
3. Способ некогерентного накопления светолокационных сигналов.
Патент РФ №2455615.
4. Малогабаритный лазерный высотомер ДЛ-5М. Фотоника, №3, 2013 г., с. 55.
5. В.Г. Вильнер, В.Г. Волобуев, А.А. Казаков, Б.К. Рябокуль Пути достижения предельной точности лазерного скоростемера. «Мир измерений», №7, 2010 г.


Твердотельный лазер с модуляцией добротности
Приемник лазерного излучения
Фотоприемное устройство с затвором
Приемник оптических импульсов
Фотоприемное устройство
Приемник оптических сигналов
Приемник оптического излучения
Способ определения дальности и/или скорости удаленного объекта
Лазерный дальномер
Приемник лазерных импульсов
Способ определения дальности и/или скорости удаленного объекта

