Результат интеллектуальной деятельности: СПОСОБ ЦИФРОВОГО ИЗМЕРЕНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ
Вид РИД
Изобретение
Изобретение относится к измерительной технике и может быть использовано при различных физических исследованиях, в системах связи, радиолокации, радионавигации, прецизионных измерениях временных интервалов (ВИ), фазометрах, цифровых вольтметрах в других областях и устройствах, где требуется выполнять цифровые измерения интервалов времени или длительностей импульсов с высокой точностью и помехоустойчивостью.
Известен способ прямого измерения временных интервалов (П.П. Орнатский. Автоматические измерения и приборы. - Киев: Вища школа, 1980. - с. 373), в котором для измерения ВИ между импульсными сигналами используются времяцифровые преобразователи (ВЦП). В основе этого метода измерения используется возможность подсчета числа импульсов опорного генератора в течение измеряемого промежутка времени с помощью цифрового счетчика. При этом основная погрешность метода равна периоду импульсов опорного генератора. Современные счетчики могут работать на частотах порядка 500 МГц, поэтому достижимая с помощью прямого метода возможность измерения длительностей ВИ, может быть не меньше единиц наносе-кунд.
Кроме того, известен способ измерения ВИ нониусного типа (П. Хоровиц, У. Хилл. Искусство схемотехники. - М.: Мир, 1986. Т. 2, с. 373-374), позволяющий получать оценки временных интервалов в субнаносекундном диапазоне, что достигается ценой использования более сложных методов обработки сигналов. ВЦП нониусного типа, кроме высокой сложности, имеют низкую надежность и помехоустойчивость.
Наиболее близким техническим решением к предлагаемому является «Способ цифрового измерения длительности периода» (а.с. СССР №563642, кл. МКИ G01R 23/00, 1976), в котором для измерения среднего периода сигнала используется весовая обработка вспомогательных ВИ, кратных периоду исследуемого сигнала. Используемая весовая обработка позволяет существенно уменьшить как погрешность дискретизации, так и шумовую составляющую суммарной погрешности измерения при тех же условиях, как и прямым методом. Достижимая с помощью метода весовой обработки измерения длительность ВИ может быть на уровне единиц наносекунд.
Данный способ позволяет измерять с высокой точностью и помехоустойчивостью период импульсной последовательности, сформированной из исследуемого гармонического сигнала, наиболее близок по своей сущности к заявляемому и является для него прототипом.
Недостатком этого способа является то, что измеряя период импульсных последовательностей с высокой точностью, он не приспособлен для измерения длительностей этих импульсов и других коротких ВИ. Кроме того, формирующее устройство прототипа обеспечивает формирование импульсных последовательностей по переходам гармонического сигнала через нулевой уровень, что ограничивает возможности прототипа для измерения коротких ВИ.
Задачей изобретения является расширение диапазона измерения длительностей временных интервалов с повышенной точностью и помехоустойчивостью.
Поставленная задача решается тем, что в предлагаемом способе цифрового измерения длительности временных интервалов, основанном на формировании внутри измерительного временного интервала, равного целому числу периодов исследуемого сигнала, вспомогательных временных интервалов, которые заполняют счетными импульсами, число которых в каждом последующем вспомогательном интервале умножают на весовые коэффициенты, увеличивающиеся каждый раз на единицу до среднего из n вспомогательных интервалов с последующим уменьшением каждый раз на единицу, внутри измерительного временного интервала формируют чередующиеся друг с другом нечетные и четные вспомогательные интервалы с длительностями, соответственно равными:
Твх+τвх и Твх-τвх,
где Твх - период входного сигнала;
τвх - длительность входного сигнала, которые при последовательном суммировании взвешенных нечетных и вычитании четных временных интервалов определяют усредненное значение длительности входного временного интервала по формуле:
где τвхi=kit0 - результат заполнения счетными импульсами i-го временного интервала, ki - количество счетных импульсов в i-м временном интервале, t0 - период следования счетных импульсов, gi - весовой коэффициент i-го результата усреднения, а при последовательном суммировании вспомогательных временных интервалов определяют усредненный период входного сигнала по формуле:
где Tвхi=kit0 - результат заполнения счетными импульсами i-го периода входного сигнала; ki - количество счетных импульсов в i-м периоде.
Сущность изобретения поясняется чертежами.
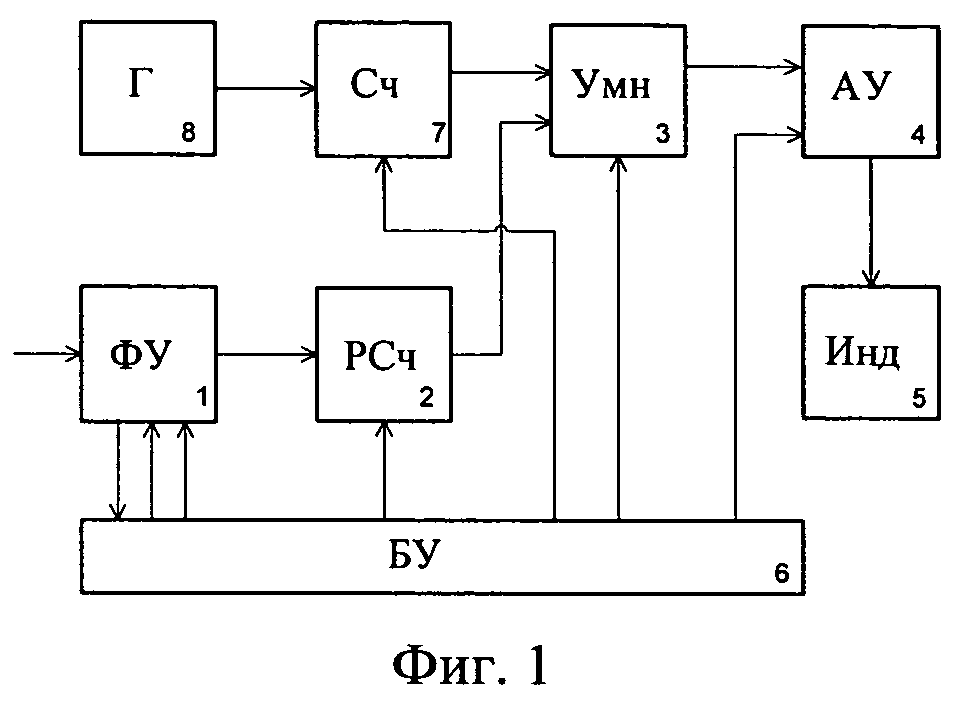
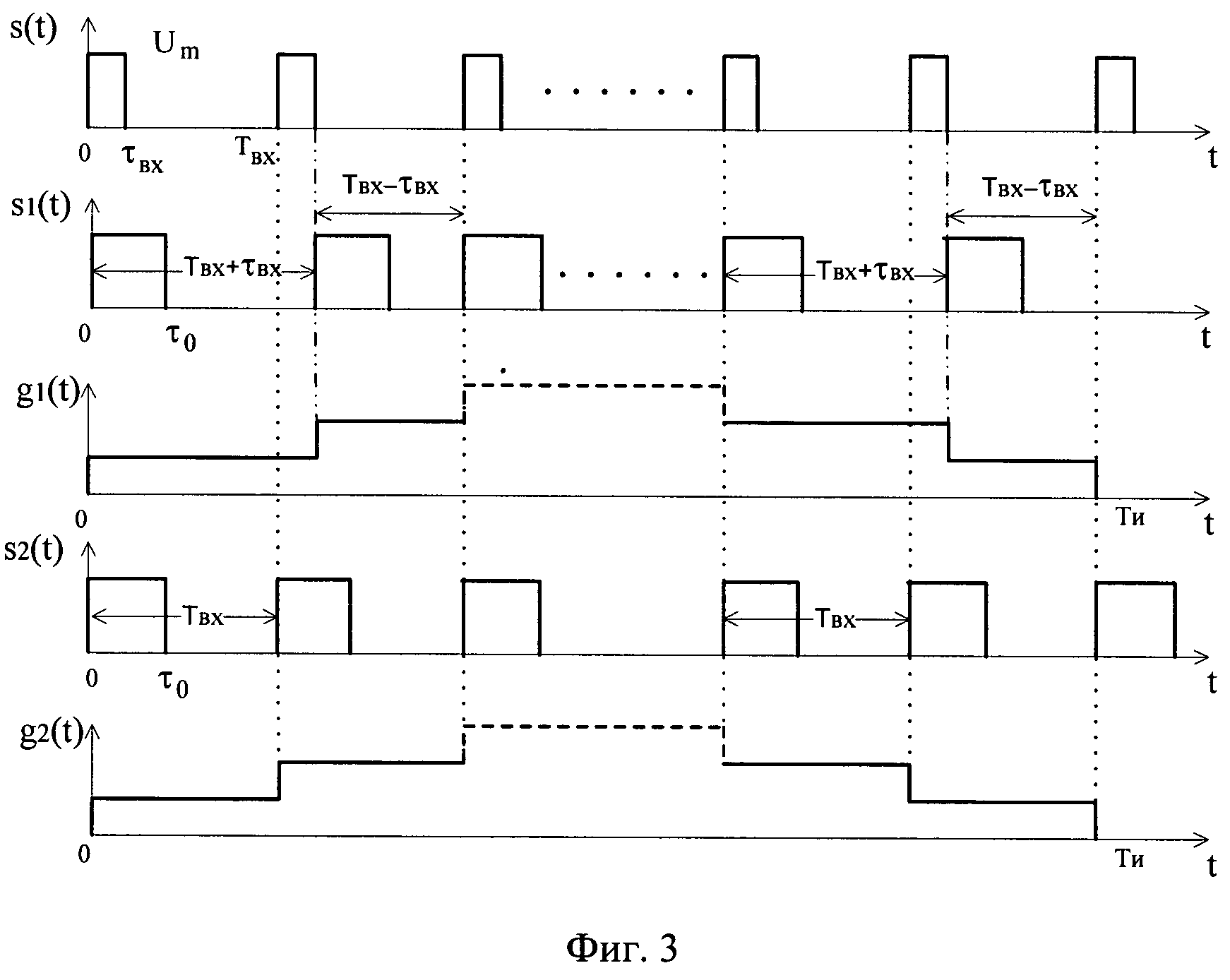
На фиг. 1 представлена функциональная схема варианта устройства, реализующая способ цифрового измерения длительности временных интервалов (измеритель ВИ); на фиг. 2 приведена функциональная схема блока формирования измерительных сигналов, а на фиг. 3 приведены временные диаграммы, поясняющие принцип формирования измерительного временного интервала, вспомогательных временных интервалов и вид весовых функций.
Функциональная схема устройства, приведенная на фиг. 1, реализующая способ цифрового измерения длительности временных интервалов, содержит блок формирования измерительных сигналов ФУ 1, который через последовательно соединенные реверсивный счетчик РСч 2, умножитель Умн 3 и арифметическое устройство АУ 4 соединен с индикатором Инд 5. Первый вход блока формирования измерительных сигналов ФУ 1 является входом измерителя ВИ, а второй выход соединен с входом блока управления БУ 6, первый выход которого подключен к второму входу блока формирования измерительных сигналов ФУ 1, а второй выход блока управления БУ 6 соединен с третьим входом блока ФУ 1, при этом третий выход блока управления БУ 6 соединен со вторым входом РСч 2, а четвертый через счетчик Сч 7 соединен со вторым входом умножителя Умн 3, второй вход счетчика Сч 7 соединен с выходом генератора счетных импульсов Г 8, пятый выход блок управления БУ 6 подключен к третьему входу умножителя Умн 3, а шестой соединен со вторым входом арифметического устройства АУ 4.
Функциональная схема блока формирования измерительных сигналов (ФУ 1), приведенная на фиг.2, содержит последовательно соединенные одновибратор ОВ 9, первую схему И 10 и схему ИЛИ 11, выход которой является первым выходом блока ФУ 1. При этом вход ОВ 9 является первым входом блока ФУ 1 и одновременно через второй одновибратор ОВ 12, вторую схему И 13 соединен со вторым входом схемы ИЛИ 11, а выход одновибратора ОВ 9 одновременно соединен с входом блока управления БУ 6 и является вторым выходом блока ФУ 1, второй и третий входы которого соединены с первым и вторым выходом блока управления БУ 6 соответственно.
Устройство, реализующее предлагаемый способ, работает следующим образом. Импульсы, сформированные в блоке ФУ 1 от фронтов и срезов исследуемого сигнала (s(t) и s1(t) - на фиг. 3), поступают на реверсивный счетчик РСч 2, включенный на суммирование и подсчитывающий число периодов, и на блок управления БУ 6. На этом этапе работы измерителя ВИ формируются образцовые импульсы (s1(t) - на фиг. 3) служащие метками, с помощью которых формируют чередующиеся друг с другом нечетные и четные вспомогательные интервалы с длительностями, соответственно равными Твх+τвх и Твх-τвх, с привязкой к фронтам и срезам исследуемой последовательности импульсов s(t). С помощью генератора отсчетных импульсов Г 8, счетчика Сч 7 и БУ 6 заполняется первый (нечетный) вспомогательный временной интервал от сформированной в ФУ 1 импульсной последовательности, синхронизированный с фронтом и срезом исследуемого сигнала. Результат заполнения первого вспомогательного интервала с длительностью, равной Твх+τвх, умножается в УМН 3 на единицу (состояние РСч 2 и значение весовой функции g1(t) на фиг. 3), а полученный результат умножения поступает в арифметическое устройство АУ 4, обеспечивающее суммирование. Счетчик Сч 7 сбрасывается на ноль и производится оценка значения второго вспомогательного интервала с длительностью равной Твх-τвх. Результат оценки второго вспомогательного интервала умножается в УМН 3 на два (состояние РСч 2 и значение весовой функции g1(t) на фиг. 3), и полученный результат умножения поступает в арифметическое устройство АУ 4, обеспечивающее вычитание результата измерения второго периода по сигналу от блока управления БУ 6. Счетчик Сч 7 сбрасывается на ноль и осуществляется оценка третьего вспомогательного интервала. Описанные операции оценки повторяются до среднего из n усредняемых периодов, а затем с помощью БУ 6 реверсивный счетчик РСч 2 переключается на вычитание и с каждым последующим периодом происходит уменьшение коэффициента умножения на единицу. Таким образом, равноотстоящие от середины (средний из n усредняемых периодов) измеренные периоды входного сигнала, преобразованные во вспомогательные временные интервалы, результат заполнения каждого из которых фиксируется в счетчике Сч 7, умножаются в УМН 3 на одинаковые числа (симметрия весовой функции g1(t) на фиг. 3) и усредняются в арифметическом устройстве АУ 4, обеспечивающем последовательное чередующееся суммирование взвешенных нечетных и вычитание четных измеренных вспомогательных временных интервалов. При таком способе обработки в АУ 4 компенсируются измеренные значения периода Твх и остаются только значения τвх. Усредненный результат измерения вспомогательных временных интервалов, накопленный к окончанию работы измерителя в арифметическом устройстве АУ 4, будет численно равен:

где τвхi=kit0 - результат заполнения счетными импульсами i-го временного интервала, с;
ki - количество счетных импульсов в i-м временном интервале;
t0 - период следования счетных импульсов, с;
gi - весовой коэффициент i-го результата усреднения.
Дополнительная возможность работы устройства, работающего по предлагаемому способу, состоит в том, что измеритель ВИ можно перевести в режим работы по команде от блока управления БУ 6. В этом режиме для измерения периода начнут поступать последовательности импульсов от блока ФУ 1, соответствующие только фронту входной импульсной последовательности (сигнал s2(t) и весовая функция g2(t) на фиг. 3). Результат заполнения первого периода (T1) умножается в УМН 3 на единицу (состояние РСч 2 и значение на этот момент весовой функции g2(t) - фиг. 3), а полученный результат умножения поступает в арифметическое устройство АУ 4, обеспечивающее суммирование полученного результата измерения первого периода. Счетчик Сч 7 сбрасывается на ноль и производится оценка значения второго периода. Результат оценки Т2 умножается в УМН 3 на два (состояние РСч 2 и значение весовой функции g2(t) на фиг. 3) и полученный результат умножения поступает в арифметическое устройство АУ 4 для накопления. Дальнейшие операции измерения вспомогательных временных интервалов, равных периоду в этом режиме работы измерителя, не имеют особенностей по сравнению с первым, и к окончанию этого режима работы в арифметическом устройстве АУ 4 останется численный результат измерения длительности периодов исследуемого сигнала. При таком способе обработки вспомогательных временных интервалов в АУ 4 компенсируются измеренные значения τвх и остаются только усредненные значения периода Твх. Последовательное суммирование измеренных вспомогательных временных интервалов определяет усредненный период входного сигнала, который определяется по формуле:
где Tвхi=kit0 - результат заполнения счетными импульсами i-го периода входного сигнала, с;
ki - количество счетных импульсов в i-м периоде.
Полученный усредненный численный результат измерения длительности импульсов исследуемого сигнала τвх, находящийся в арифметическом устройстве АУ 4 (или периода Твх), поступает на индикатор Инд 5.
Работа блока ФУ 1 заключается в следующем. При измерении длительности импульсов исследуемого сигнала τвх схема И 10 в исходном состоянии открыта сигналом от блока управления БУ 6, а схема И 13 закрыта, и первый импульс входного сигнала запускает фронтом первый одновибратор ОВ 9, сформированный первый (нечетный) сигнал которого проходит через предварительно открытую сигналом от блока управления БУ 6 схему И 10 и поступает через схему ИЛИ 11 на выход блока ФУ 1 и на реверсивный счетчик РСч 2, включенный на суммирование, который будет формировать в результате работы весовую функцию, представленную на фиг. 3 как g1(t). Одновременно сигнал одновибратора ОВ 9 поступает на вход блока управления БУ 6, который сигналом управления по второму входу блока ФУ 1 (первому выходу блока управления БУ 6) «закроет» схему И 10, а сигналом по третьему входу блока ФУ 1 (второму выходу блока управления БУ 6) «откроет» схему И 13 для последующего прохождения на выход блока ФУ 1 сигнала одновибратора ОВ 12, сформированного срезом четного импульса входного сигнала. В результате отмеченных операций на выходе блока ФУ 1 будет формироваться чередующаяся последовательность образцовых импульсов, представленная на фиг. 3 (сигнал s1(t)) в виде нечетных и четных вспомогательных интервалов с длительностями, соответственно равными Tвх+τвх и Твх-τвх, синхронизированными с фронтами и срезами исследуемой последовательности импульсов s(t).
При измерении периода сигнал первого одновибратора ОВ 9 проходит на выход блока ФУ 1, как и при измерении длительности τвх, через открытую схему И 10 сигналом от блока управления БУ 6. Вторая схема И 13 в этом режиме «закрыта» управляющим сигналом от блока управления БУ 6 и на выход блока ФУ 1 будут поступать образцовые импульсы, сформированные только от фронта исследуемого сигнала (сигнал s2(t) на фиг. 3), а реверсивный счетчик будет формировать весовую функцию, представленную на фиг. 3 как g2(t).
Покажем, что в рассматриваемом устройстве вычисляется оценка измерения длительности τвх, и достигается существенное снижение погрешности дискретности, повышается точность и появляется возможность измерения интервалов времени пикосекундной длительности.
При рассматриваемом способе обработки в АУ 4 компенсируются измеренные значения периода Твх и остаются только значения τвх. Численный результат измерения (усреднения) вспомогательных временных интервалов, накопленный к окончанию работы измерителя в арифметическом устройстве АУ 4, будет численно равен:

где τвхi=kit0 - результат заполнения счетными импульсами i-го временного интервала, ki - количество счетных импульсов в i-м временном интервале, t0 - период следования счетных импульсов, gi - весовой коэффициент i-го результата усреднения.
Среднее значение временного интервала исследуемого сигнала будет равно:

Определим математическое ожидание m(τср), учитывая что математическое ожидание соответствует длительности ВИ исследуемого сигнала m(τi)=τвх, а константы выносятся за знак математического ожидания:

где m(x) - операция статистического усреднения. Из (3) следует, что вычисленный устройством средний ВИ соответствует истинному значению ВИ сигнала, сформированного на выходе ФУ 1, и соответствует несмещенной оценке ВИ.
Определим дисперсию σ2(τср), обусловленную погрешностью дискретности, учитывая что константы выносятся за знак дисперсии в квадрате, и симметрию весовой функции:

где σ2(ΔН) - дисперсия погрешности дискретности «начала» операции усреднения вспомогательных временных интервалов, а σ2(Δk) - дисперсия погрешности «конца» измерения вспомогательных временных интервалов (Чмых М.К. Цифровая фазометрия / М.К. Чмых. - М.: Радио и связь, 1993. - с. 23-25). Поскольку дисперсия оценки одного вспомогательного временного интервала равна  , то полагая погрешности ΔН и Δk независимыми и
, то полагая погрешности ΔН и Δk независимыми и 
в результате получим:

Здесь учтено, что
Чтобы оценить эффективность использования весовой обработки при снижении дисперсии погрешности дискретности, составим отношение:

где  - дисперсия τср прямого (классического) устройства оценки среднего значения ВИ без весовой обработки результатов измерения. Из (5) видно, что среднеквадратическое значение погрешности дискретности, при больших n, уменьшается в ~
- дисперсия τср прямого (классического) устройства оценки среднего значения ВИ без весовой обработки результатов измерения. Из (5) видно, что среднеквадратическое значение погрешности дискретности, при больших n, уменьшается в ~  раз. Так, например, при частоте квантования (частоте генератора образцовых импульсов) 100 МГц максимальная погрешность дискретности классического устройства будет равна ±10-8 c, а среднеквадратическое значение погрешности равно 4 наносекундам. В устройствах с весовой обработкой, при той же частоте квантования и количестве усредняемых периодов, например n=8·102 - среднеквадратическое значение погрешности дискретности окажется равным ~ 400 пикосекундам, то есть уменьшается в 10 раз. Такое же среднеквадратическое значение погрешности дискретности можно получить в классическом устройстве при частоте квантования f0≥1 ГГц, то есть связано с увеличением частоты квантования в 10 раз и может быть реализовано только при использовании быстродействующей элементной базы. Если n=8·104, то погрешность дискретности соответственно уменьшится в 100 раз. Учитывая жесткую корреляцию при вычитании численных значений результатов измерения вспомогательных временных интервалов, можно получить дополнительные значения уменьшения погрешностей. При увеличении частоты следования импульсов опорного генератора пропорционально растет и выигрыш в точности оценки измерения длительности коротких импульсов, которые практически не представляется возможности измерить классическими ВЦП и устройством прототипа, а значения измеряемых длительностей импульсов соответствуют десяткам пикосекунд.
раз. Так, например, при частоте квантования (частоте генератора образцовых импульсов) 100 МГц максимальная погрешность дискретности классического устройства будет равна ±10-8 c, а среднеквадратическое значение погрешности равно 4 наносекундам. В устройствах с весовой обработкой, при той же частоте квантования и количестве усредняемых периодов, например n=8·102 - среднеквадратическое значение погрешности дискретности окажется равным ~ 400 пикосекундам, то есть уменьшается в 10 раз. Такое же среднеквадратическое значение погрешности дискретности можно получить в классическом устройстве при частоте квантования f0≥1 ГГц, то есть связано с увеличением частоты квантования в 10 раз и может быть реализовано только при использовании быстродействующей элементной базы. Если n=8·104, то погрешность дискретности соответственно уменьшится в 100 раз. Учитывая жесткую корреляцию при вычитании численных значений результатов измерения вспомогательных временных интервалов, можно получить дополнительные значения уменьшения погрешностей. При увеличении частоты следования импульсов опорного генератора пропорционально растет и выигрыш в точности оценки измерения длительности коротких импульсов, которые практически не представляется возможности измерить классическими ВЦП и устройством прототипа, а значения измеряемых длительностей импульсов соответствуют десяткам пикосекунд.
Дополнительным преимуществом способа является то, что одновременно уменьшается и шумовая составляющая суммарной погрешности измерения. Эта погрешность рассматриваемого устройства оценки среднего значения ВИ будет снижена в FэT/4 раза, где Fэ - эффективная ширина спектра воздействующего шума, а Т - время усреднения. Так, например, при T=1 с и Fэ=103 Гц уменьшение дисперсии оценки по сравнению с классическим усредняющим устройством оценки ВИ составит 2,5·102 раза.
При измерении периода рассматриваемым способом усредненный результат измерения периода будет соответствовать условиям поставленной задачи.
Одновибраторы, счетчики и реверсивные счетчики могут быть выполнены по схемам, приведенным в (П. Хоровиц, У. Хилл. Искусство схемотехники. - М.: Мир, 1986. Т. 1, с. 556, 565, 566); схемы умножителей (Постников А.И. Теория автоматов и машинная арифметика. - Спб.: Питер, 2006. - 376 с.), а индикатор (Справочник по интегральным микросхемам / Под ред. Б.В. Тарабрина. - Сов. радио, 1981, с. 58-62).
Способ цифрового измерения длительности временных интервалов, основанный на формировании внутри измерительного временного интервала, равного целому числу периодов исследуемого сигнала, вспомогательных временных интервалов, которые заполняют счетными импульсами, число которых в каждом последующем вспомогательном интервале умножают на весовые коэффициенты, увеличивающиеся каждый раз на единицу до среднего из n вспомогательных интервалов с последующим уменьшением каждый раз на единицу, отличающийся тем, что внутри измерительного временного интервала формируют чередующиеся друг с другом нечетные и четные вспомогательные интервалы с длительностями, соответственно равными Т+τ и T-τ, где Т - период входного сигнала; τ - длительность входного сигнала, которые при последовательном суммировании взвешенных нечетных и вычитании четных временных интервалов определяют усредненное значение длительности входного временного интервала по формуле: ,где τ=kt - результат заполнения счетными импульсами i-го временного интервала, k - количество счетных импульсов в i-м временном интервале, t - период следования счетных импульсов, g - весовой коэффициент i-го результата усреднения, а при последовательном суммировании вспомогательных временных интервалов определяют усредненный период входного сигнала по формуле: ,где T=kt - результат заполнения счетными импульсами i-го периода входного сигнала.

Способ защиты интегральных микросхем при попадании в них тяжелых заряженных частиц
Способ защиты командно-измерительной системы космического аппарата
Способ эскплуатации никель-водородных аккумуляторных батарей системы электропитания космического аппарата, эксплуатирующегося на низкой околоземной орбите
Способ коррекции орбитального движения космического аппарата
Способ резервирования космического аппарата на геостационарной орбите
Способ мониторинговой коллокации на геостационарной орбите
Держатель
Регулируемый узел крепления
Способ автономной коллокации на геостационарной орбите
Способ электрических проверок космического аппарата
Способ защиты интегральных микросхем при попадании в них тяжелых заряженных частиц
Способ защиты командно-измерительной системы космического аппарата
Способ эскплуатации никель-водородных аккумуляторных батарей системы электропитания космического аппарата, эксплуатирующегося на низкой околоземной орбите
Способ коррекции орбитального движения космического аппарата
Способ резервирования космического аппарата на геостационарной орбите
Способ мониторинговой коллокации на геостационарной орбите
Держатель
Регулируемый узел крепления
Способ автономной коллокации на геостационарной орбите
Способ электрических проверок космического аппарата

