Результат интеллектуальной деятельности: СПОСОБ ТРЁХМЕРНОГО (3D) КАРТОГРАФИРОВАНИЯ
Вид РИД
Изобретение
Настоящий способ относится к области обработки и отображения пространственной информации, компьютерным средствам преобразования и визуализации трехмерных моделей, визуального восприятия получаемого изображения и может быть использован для построения топографических карт на основе трехмерных цифровых моделей местности.
Известен способ картографирования, который заключается в создании топографических карт и планов по данным лазерного сканирования [В.А. Середович. Наземное лазерное сканирование, Новосибирск, СГГА, 2009 г.], взятый в качестве прототипа.
Сущность данного способа состоит в том, что на контролируемом участке проводят съемку ситуации и рельефа с помощью лазерного сканера. По данным съемки составляют топографические карты и планы по условным знакам того или иного масштаба. Недостатком этого способа является трудоемкость процесса повторения измерения для уточнения планового или высотного положения объектов местности вследствие необходимости повторного выполнения полевых работ.
Данный способ также предполагает наличие человеческого фактора в процессе проведения измерений, что ведет к снижению достоверности и точности измерения. Кроме того, составленные карты и планы по полученным полевым данным отражают плановую и высотную ситуацию только в соответствии с требованиями для их составления в определенном масштабе, чего бывает недостаточно при требованиях, отличных от нормативных.
Задача, на решение которой направлено заявленное техническое решение, заключается в разработке способа картографирования в трехмерном пространстве с применением метода лазерного сканирования и 3D навигации, что позволяет повысить эффективность работы при составлении всех видов карт и планов за счет обеспечения достоверных и точных значений геометрических параметров отображаемых объектов, а также подробности и наглядности представляемой информации.
Поставленная задача достигается тем, что в способе трехмерного (3D) картографирования, при котором выполняют сканирование заданного участка местности с привязкой к внешней системе координат, в результате чего определяют пространственные координаты Χ, Υ, Ζ точек отраженного лазерного луча от объектов, формируют облако точек всех объектов, передают результаты сканирования (сканы) в ПЭВМ, регистрируют в ней сканы, получают фактическую цифровую точечную и векторную трехмерную (3D) модель заданного участка местности, согласно изобретению на этой же модели выбирают объект картографирования, определяют его границы, виртуально оптимизируют маршрут путем моделирования траектории движения внутри модели с помощью 3D навигации, создавая визуальный эффект присутствия и перемещения по заданному маршруту из любой ее точки и под любым углом, задают необходимую скорость перемещения внутри модели и точку обзора, указывают частоту смены кадров, выполняют перемещение из одной точки в другую по заданной траектории с определенной скоростью, с элементом проникновения сквозь объекты, наносят сквозные трехмерные полилинии, не нарушая свойств объектов в границах полученной виртуальной измерительной картографической среды, выполняют предварительный анализ картографируемого участка, определяют параметры фильтрации для удаления из облака точек лазерных отражений не подлежащих картографированию объектов, проводят их фильтрацию в автоматическом режиме, получают при этом облако точек, представленное только объектами, необходимыми для нанесения на карту или план, составляют карту или план по фильтрованному облаку точек.
Указанная совокупность признаков позволяет повысить эффективность процесса обработки и отображения пространственной информации за счет обеспечения точности, подробности и наглядности представляемой трехмерной картографической информации.
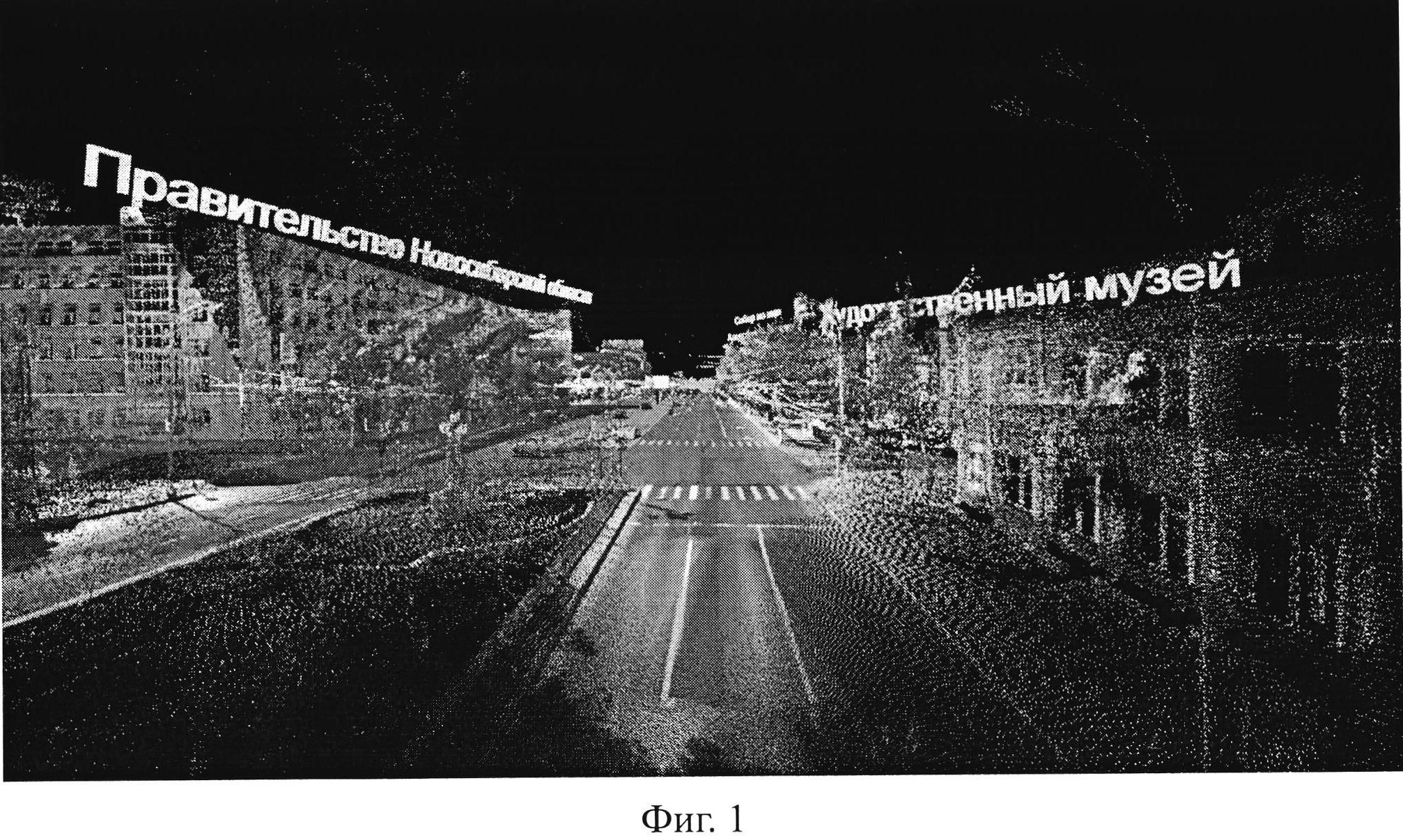
Способ иллюстрируется следующими чертежами. На Фиг. 1 представлена схема создания точечной трехмерной (3D) модели объектов территории. На Фиг. 2 представлена схема создания виртуальной измерительной картографической среды в виде фактической цифровой векторной трехмерной (3D) модели объектов территории.
Предлагаемый способ осуществляется следующим образом. По результатам лазерного сканирования не выполняют создание топографических карт и планов, а используют полученное облако точек лазерных отражений как конечный продукт, принимая его как трехмерную цифровую карту или план, или выполняют векторизацию облака точек и получают трехмерную цифровую векторную модель. В зависимости от площади и особенностей участка съемки в качестве исходных принимаются данные, полученные в результате наземного, воздушного или мобильного лазерного сканирования. При наземном лазерном сканировании устанавливают наземный лазерный сканер на точку планово-высотного обоснования, выполняют сканирование участка с точек планово-высотного обоснования, в результате чего определяют пространственные координаты по осям Χ, Υ, Ζ точек отражения лазерного луча от различных объектов, получают скан, выполняют повторно действия на станциях, расположенных через 20-50 метров от предыдущих, передают результаты сканирования (сканы) в компьютерную программу, регистрируют в ней сканы со всех станций и получают фактическую цифровую точечную трехмерную (3D) модель снимаемой территории. При воздушном лазерном сканировании соответствующий сканер устанавливают на борту аэросъемочного самолета или вертолета, выполняют пролет вдоль картографируемой территории, в результате которого также определяют пространственные координаты по осям Χ, Υ, Ζ точек отражения лазерного луча от различных объектов, получают непрерывные сканы, передают их в компьютерную программу, в которой выполняют уравнивание траекторий полета и сканов, получая при этом также цифровую точечную трехмерную (3D) модель снимаемой территории. Отслеживать местоположение воздушного средства сканирования призваны GPS и инерциальная система. GPS-система определяет координаты XYZ положения сканерного блока на борту данного средства сканирования, а инерциальная - угловые элементы, такие как крен, курс и тангаж. При мобильном лазерном сканировании специальный сканер устанавливают на крыше наземного транспортного средства и выполняют вышеназванные для воздушного лазерного сканирования действия. При мобильном и воздушном лазерном сканировании также получают цифровые фотографии с помощью входящих в состав соответствующих систем цифровых камер. В случае мобильного и воздушного лазерного сканирования полученная в результате уравнивания точечная модель подвергается с помощью специального программного модуля дополнительной обработке с целью извлечения из фотографий реальных цветов. Каждой точке лазерного отражения пристраивается цвет по системе RGB (Фиг. 1). Точечную трехмерную (3D) модель объектов территории передают в ПЭВМ и с помощью специальной компьютерной программы получают фактическую цифровую векторную трехмерную (3D) модель объектов территории (Фиг. 2).
Полученная точечная или векторная трехмерная модель используется для определения местоположения и геометрических характеристик объектов территории, представляя собой трехмерную картографическую продукцию. Для создания карты с тематической направленностью задают установочные параметры, выбирают оптимальный маршрут и границы с помощью 3D навигации. Для навигации в этой же модели наносят с помощью инструмента рисования трехмерные полилинии в необходимом направлении, при помощи дополнительного специального программного модуля (СПМ) задают необходимую скорость перемещения внутри модели и в случае необходимости точку обзора, указывая также частоту смены кадров, и выполняют перемещение из одной точки в другую по заданной траектории с определенной скоростью, моделируя таким образом виртуальную траекторию движения внутри модели, создавая визуальный эффект перемещения с элементом проникновения сквозь объекты в случае сквозного нанесения полилиний, не нарушая свойств объектов в пределах полученной виртуальной измерительной картографической среды, выполняют предварительный анализ картографируемого участка с целью определения сложности работ по составлению различных карт и планов, определяют объекты, подлежащие картографированию, на основе проведенного анализа определяют параметры фильтрации для удаления из облака точек лазерных отражений не подлежащих картографированию объектов, проводят их фильтрацию в автоматическом режиме, применяя различные методы классификации, получая при этом облако точек, представленное только объектами, необходимыми для нанесения на карту или план, составляют карту или план по фильтрованному облаку точек.
Предлагаемый инновационный способ трехмерного цифрового картографирования позволяет:
- получать картографический продукт с совершенно новыми свойствами и функциональными возможностями;
- существенно расширить возможности картографирования;
- совмещать результаты лазерного сканирования с традиционными картами, аэрокосмическими снимками, фотографиями и т.п.;
- повысить информативность и точность данных об объектах снимаемой территории, а также снизить объем полевых работ.
Способ трехмерного (3D) картографирования, при котором выполняют сканирование заданного участка местности с привязкой к внешней системе координат, определяют пространственные координаты X, Y, Z точек отраженного лазерного луча от объектов заданного участка местности, формируют облако точек всех объектов заданного участка местности, передают результаты сканирования (сканы) в ПЭВМ, регистрируют в ней сканы, получают фактическую цифровую точечную и векторную трехмерную (3D) модель заданного участка местности, отличающийся тем, что на этой же модели выбирают объект картографирования, определяют его границы, виртуально оптимизируют маршрут путем моделирования траектории движения внутри модели с помощью 3D навигации, создавая визуальный эффект присутствия и перемещения по заданному маршруту из любой ее точки и под любым углом, задают необходимую скорость перемещения внутри модели и точку обзора, указывают частоту смены кадров, выполняют перемещение из одной точки в другую по заданной траектории с определенной скоростью, с элементом проникновения сквозь объекты, наносят сквозные трехмерные полилинии, не нарушая свойств объектов в границах полученной виртуальной измерительной картографической среды, выполняют предварительный анализ картографируемого участка, определяют параметры фильтрации для удаления из облака точек лазерных отражений не подлежащих картографированию объектов, проводят их фильтрацию в автоматическом режиме, получают при этом облако точек, представленное только объектами, необходимыми для нанесения на карту или план, составляют карту или план по фильтрованному облаку точек.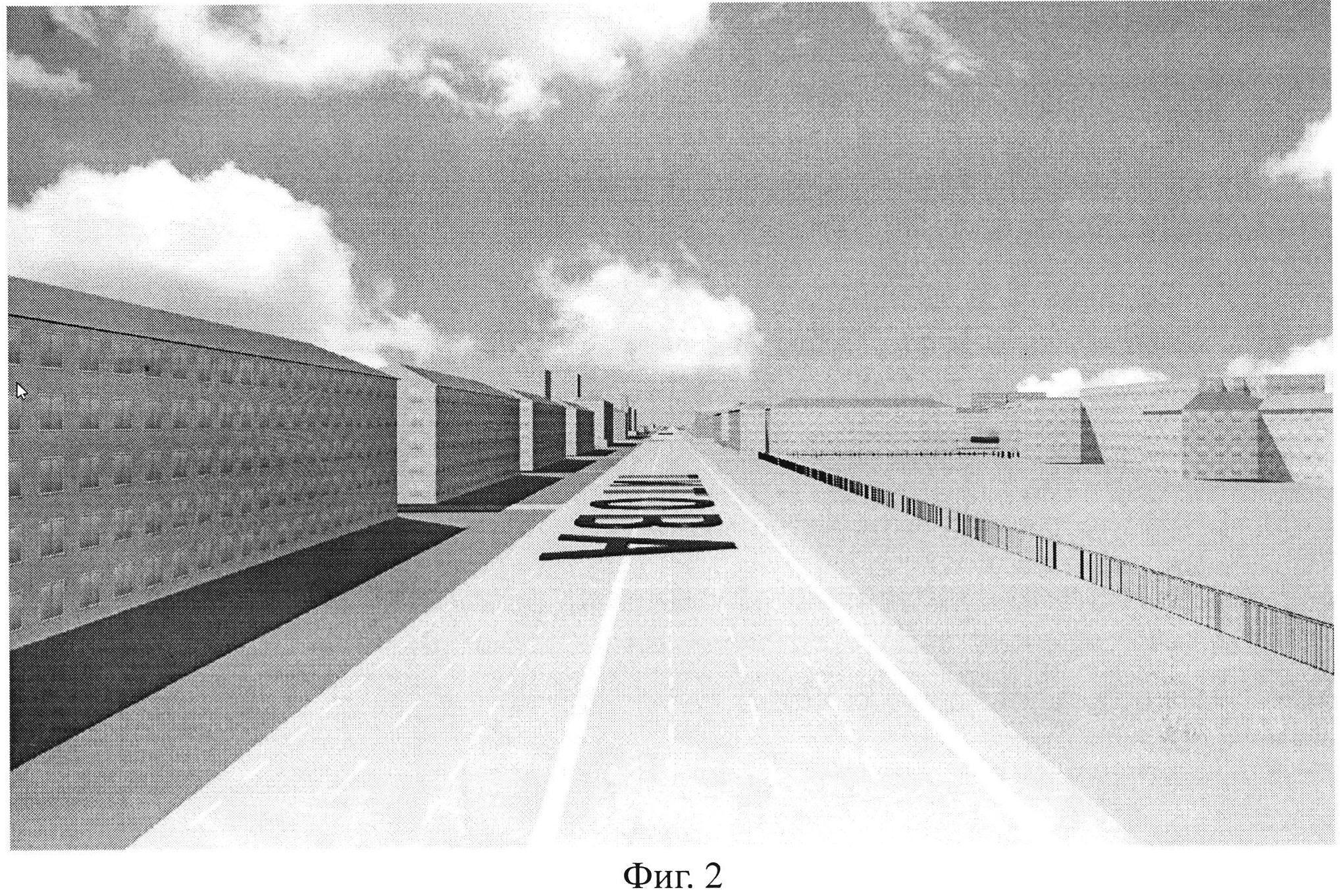
Способ определения и восстановления положения горизонтальной оси линейного инженерного объекта
Способ определения величины и направления крена резервуара вертикального цилиндрического
Способ определения параметров геометрических элементов автомобильной дороги и характеристик придорожной полосы
Способ определения поперечной ровности (колейности) поверхности дорожного полотна автомобильной дороги
Способ определения и восстановления положения горизонтальной оси линейного инженерного объекта
Способ определения величины и направления крена резервуара вертикального цилиндрического
Способ определения параметров геометрических элементов автомобильной дороги и характеристик придорожной полосы
Способ определения поперечной ровности (колейности) поверхности дорожного полотна автомобильной дороги
Способ получения, обработки, отображения и интерпретации геопространственных данных для геодезического мониторинга деформационного состояния инженерного объекта
Способ геодезического мониторинга деформационного состояния земной поверхности в сейсмоопасных районах с применением технологии лазерного сканирования
Способ определения погрешности измерения углов наземным лазерным сканером
Способ геодезического мониторинга деформационного состояния земной поверхности на территории разрабатываемых открытым способом крупных рудных месторождений с применением технологии лазерного сканирования
Способ геодинамического мониторинга за смещениями блоков верхней части земной коры и деформационного состояния земной поверхности с применением технологии высокоточного спутникового позиционирования глобальной навигационной спутниковой системы (гнсс) глонасс /gps

