Результат интеллектуальной деятельности: СПОСОБ ПОИСКА, ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ
Вид РИД
Изобретение
Предложенное изобретение относится к области радиационного контроля (РК) и предназначено для поиска, обнаружения и локализации источников ионизирующих излучений (ИИИ) наземными или морскими мобильными комплексами РК и стационарными устройствами РК в случае радиационных аварий, утери или незаконного обращения с ИИИ и радиоактивными отходами, при проведении радиационного мониторинга территорий и акваторий, промышленных, гражданских и военных объектов, территорий аэропортов, вокзалов, речных и морских портов, метро, транспортных коммуникаций, на контрольно-пропускных пунктах.
Известен способ обнаружения ИИИ стационарными и мобильными комплексами РК (Патент РФ №2140660 «Способ обнаружения слабых потоков ионизирующих излучений», Бюл. №17 от 27.10.1999 г.). Способ предназначен для решения задач обнаружения ИИИ при мониторинге заданных зон и на контрольно-пропускных пунктах, когда имеется визуальный контакт с объектом контроля и известно значение скорости счета фонового излучения в зоне контроля до появления там инспектируемого объекта. Способ основан на критерии Неймана-Пирсона. По задаваемой оператором вероятности ложной тревоги определяют из таблиц для нормального закона распределения порог q0 и измеряют в зоне контроля среднюю скорость счета фонового излучения b за время tb до появления в ней инспектируемого объекта. Затем измеряют число импульсов N излучения от инспектируемого объекта по командам оператора «СТАРТ» и «СТОП» в течение времени tn нахождения объекта в зоне видимости детекторов и вычисляют среднюю скорость счета аддитивной суммы сигнала и фона n как отношение замеренного числа импульсов N ко времени измерения tn. На основании полученных выше данных вычисляют параметр η. Если параметр η больше порога q0, то принимают решение об обнаружении, в противном случае - o необнаружении.
Способ не пригоден для решения задач обнаружения ИИИ движущимся комплексом и, тем более, не пригоден для поиска и локализации ИИИ. К недостаткам способа следует также отнести зависимость результатов контроля от временных флуктуации гамма-фона. Поэтому рекомендуется измерять фон непосредственно перед инспекцией и сразу после того, как контролируемый объект покинет зону контроля, чтобы оценить флуктуацию фона и провести соответствующую корректировку результатов инспекции. Для компенсации влияния флуктуации фона загрубляют чувствительность (увеличивают q0) во избежание ложных срабатываний. А это грозит возможным пропуском сигнала обнаружения.
Известны комплексы, в которых реализуется Патент РФ №2242024, «Способ поиска и обнаружения источников ионизирующих излучений», Бюл. №34 от 10.12.2004 г. Способ обеспечивает поиск и обнаружение ИИИ при движении носителя комплекса, он принципиально не требует предварительного измерения фона и адаптирован к работе в условиях его флуктуации (временных и пространственных). Способ основан на критерии Неймана-Пирсона. На основании задаваемой оператором вероятности ложной тревоги определяют из таблиц для нормального закона распределения порог q0. В процессе движения от начала до конца инспектируемой зоны (трассы) измеряют среднюю скорость счета аддитивной суммы сигнала и фона n(t) на равных интервалах времени экспозиции. Этот интервал зависит от эффективной длительности сигнала об обнаружении te. Из значений вектора n1(t), измеренных на первом интервале, определяют амплитуду сигнала am, среднюю скорость счета фона b и положение сигнала am на шкале времени. По этим данным вычисляют параметр η, значение которого сравнивают с порогом q0. Если параметр η больше порога q0, то принимают решение об обнаружении ИИИ на интервале №1, в противном случае - о необнаружении. Параллельно с обработкой результатов на первом интервале измеряют среднюю скорость счета аддитивной суммы сигнала и фона n2(t) на втором интервале. Вектор n2(t) подвергают обработке аналогично n1(t), вычисляют значения am, b, определяют положение am на шкале времени и сравнивают вычисленный по этим данным параметр η. Если параметр η больше q0, то принимают решение об обнаружении ИИИ на интервале №2, в противном случае - о необнаружении. Далее повторяют указанную процедуру для интервала №3, 4… до конца зоны поиска ИИИ.
При обнаружении ИИИ фиксируют с помощью спутниковой навигационной системы (СНС) на электронной карте местности координаты носителя комплекса. Определяют линию-направление на обнаруженный ИИИ как перпендикуляр к борту носителя (или к участку трассы). Эту линию наносят на электронную карту. Определение местоположения обнаруженного ИИИ осуществляют по пересечению не менее двух линий-направлений на ИИИ, определенных аналогичным способом в разных точках трассы в пределах «видимости» ИИИ.
Точность этого способа невысока, т.к. устройства детектирования имеют широкоугольную диаграмму направленности (180° и более), и истинное направление на ИИИ может отличаться от перпендикуляра к борту носителя комплекса (участку трассы) на десятки градусов.
Способ имеет существенный недостаток, заключающийся в следующем. Введенная выше эффективная длительность сигнала об обнаружении te определяется из соотношения:
где:
r0 - расстояние между детектором и ожидаемой точкой размещения разыскиваемого ИИИ;
ν0 - средняя скорость комплекса в момент инспекции;
k - коэффициент, значение которого определяется конструкцией устройств детектирования (обычно принимают значение k равным 2).
Расстоянию r0, которое определяет эффективную длительность сигнала te, заранее присваивается некоторое конкретное значение, которое будет отличаться от реальной дальности до обнаруживаемого ИИИ. Чем больше отличие реальной дальности от прогнозируемой величины r0, тем больше будет вероятность пропуска сигнала (необнаружения ИИИ).
Известен патент РФ №2456638 «Способ поиска и обнаружения источников ионизирующих излучений», Бюл. №20 от 20.07.2012 г., используемый в мобильном комплексе «Соратник-01». В комплексе «Соратник-01» используются гамма-нейтронные устройства детектирования с широкоугольными диаграммами направленности (больше 180°) за счет установки на их тыльной стороне экранов - поглотителей излучений для гамма-счетных детекторов и замедлителей нейтронов из водородосодержащих материалов - для нейтронных детекторов. Устройства детектирования установлены на поворотной платформе, благодаря которой их входные окна могут быть направлены или на правый борт, или на левый борт, или на корму носителя комплекса. В способе, изложенном в Патенте РФ №2456638, исключена возможность пропуска сигнала, как в способе Патент РФ №2242024. Это достигается тем, что обработка вектора n(t) производится последовательным перебором te (последовательно увеличивают te в 1,3 раза от минимального значения до некоторого максимума, что равносильно пошаговому увеличению расстояния до искомого ИИИ, закладываемому в алгоритм). Благодаря этому усовершенствованию способа уменьшается вероятность пропуска сигнала и появилась возможность оценки дальности до обнаруженного ИИИ с погрешностью, не превышающей 40%. В остальном поиск и обнаружение ИИИ осуществляются аналогично алгоритму Патента РФ №2242024. Несмотря на наличие в комплексе поворотной платформы, направление на обнаруженный ИИИ определяют по-прежнему как перпендикуляр к трассе (или к борту носителя, по которому обнаружен источник), т.к. способ не дает регулярного алгоритма определения направления на обнаруженный ИИИ. Как было показано выше, при этом возникает погрешность локализации обнаруженного ИИИ из-за широкоугольной диаграммы направленности устройств детектирования, и истинное направление на ИИИ может отличаться от перпендикуляра к борту носителя комплекса на десятки градусов.
Наиболее близким к предлагаемому способу является мобильный комплекс радиационного контроля (Патент РФ №98823, Бюл. №30 от 27.10.2010 г.), состоящий из детектирующей системы, включающей пластиковый гамма-детектор с широкоугольной диаграммой направленности и сканирующий гамма-детектор, построенный на кристалле NaI(T1) ⌀63×63 мм, помещенном в цилиндрический свинцовый экран-поглотитель гамма-квантов (коллиматор) с углом поля зрения 30°, установленный на платформе, которая может вращаться относительно вертикальной оси в диапазоне углов не более 180°. В комплексе применен способ поиска, обнаружения и локализации источников гамма-излучения в два этапа. На первом этапе осуществляют поиск, обнаружение и предварительная локализация обнаруженного гамма-источника пластиковым гамма-детектором с использованием способа, например, по патенту РФ №2456638 при движении со скоростью до 20 км/ч. После объезда контролируемой зоны обрабатывают полученную информацию от гамма-детекторов, видеоканала, данные спутниковой навигационной системы и картографии. В результате анализа определяют координаты «подозрительных» точек по маршруту движения комплекса, ориентировочную дальность r0 до предполагаемого гамма-источника (с погрешностью ±40%) и ориентировочное направление на предполагаемый гамма-источник (как перпендикуляр к борту носителя комплекса). На втором этапе (этапе локализации) выполняют повторное обследование «подозрительных» точек на трассе с помощью сканирующего гамма-детектора с целью уточнения направления на обнаруженный ранее источник гамма-излучения. Для каждой точки сканирование проводят два раза: с позиций до «подозрительной» точки на расстоянии не менее r0 и после «подозрительной» точки - на такую же величину. По двум полученным линиям-направлениям расчетным путем получают на карте точку пересечения - положение источника гамма-излучения. Точность локализации источника при этом получается выше, чем на первом этапе. Далее комплекс переезжает ко второй «подозрительной» точке для локализации второго обнаруженного источника гамма-излучения и к последующим.
Для успешного решения задачи на втором этапе необходимо, чтобы чувствительность сканирующего детектора была не хуже, чем у несканирующего. Тем более что сканирование производят, не доезжая до «подозрительной» точки на расстояние r0, а затем через это же расстояние после «подозрительной» точки. Допустим, несканирующий детектор обнаружил на первом этапе источник гамма-излучения, оценка расстояния до него показала r0=150 м, тогда сканирующий детектор должен «увидеть» источник гамма-излучения за 212 м (диагональ прямоугольного треугольника с катетами 150 м). Это потребует, по-видимому, увеличения объема детектора NaI(T1), либо увеличения количества детекторов NaI(T1) 063×63 мм. В комплексе отсутствует физическая реализация вычисленного угла направления на обнаруженный гамма-источник. Это лишает возможности оперативной видеофиксации местоположения обнаруженного источника гамма-излучения. Недостатком данного комбинированного способа поиска, обнаружения и локализации гамма-источников является также сложность в реализации процесса и недостаточная оперативность в получении информации, а в некоторых случаях - и ее потеря. При повторном выезде возможно изменение радиационной обстановки, или разыскиваемый источник «уехал», или вообще нельзя выехать по оперативным причинам. Данный двухэтапный способ поиска, обнаружения и локализации ИИИ применительно к комплексу по Патенту РФ №98823 контролирует наличие-отсутствие источников гамма-излучения только по одну сторону трассы, что ограничивает его применение. Реализация способа требует высокой квалификации оператора, особенно при анализе результатов первого этапа и принятии решения.
Задачей предлагаемого изобретения является создание оперативного способа поиска, обнаружения и определения местоположения (локализации) ИИИ с повышенной точностью в условиях нестационарного радиационного фона.
Решение поставленной задачи достигается тем, что измерение средних скоростей счета аддитивной суммы сигнала и фона осуществляют (Фиг.1, вид сверху) при помощи двух одинаковых широкоугольных устройств детектирования (УД) - правого УДR 1 и левого УДL 2, имеющих экраны-поглотители 3 излучения, при этом УД отбалансированы таким образом, что их средние скорости счета по фону отличается не более чем на 0,5%. Оба УД установлены на поворотной платформе 4 с направленными в противоположные стороны входными окнами 5 и 6, образующими острый двугранный угол 7 2ψ с биссектрисой 8, проходящей через нулевую риску 9 платформы 4. А платформа 4 находится в положении, при котором риска 9 совпадает с индексом 10, обозначающим осевую линию носителя комплекса или основания устройства. Платформа 4 может поворачиваться относительно оси, перпендикулярной плоскости чертежа. Угол 7 2ψ вводится для уменьшения зоны нечувствительности при определении направления 11 на ИИИ, возникающей, особенно при малых расстояниях до ИИИ, из-за конечных значений толщины УД и экранов-поглотителей. Выходные сигналы (аддитивная сумма сигнала ИИИ и фона) от УДR 12 nR и от УДL 13 nL поступают на сравнивающее устройство 14, где формируется разностный сигнал 15 Δn:
Δn=nR-nL.
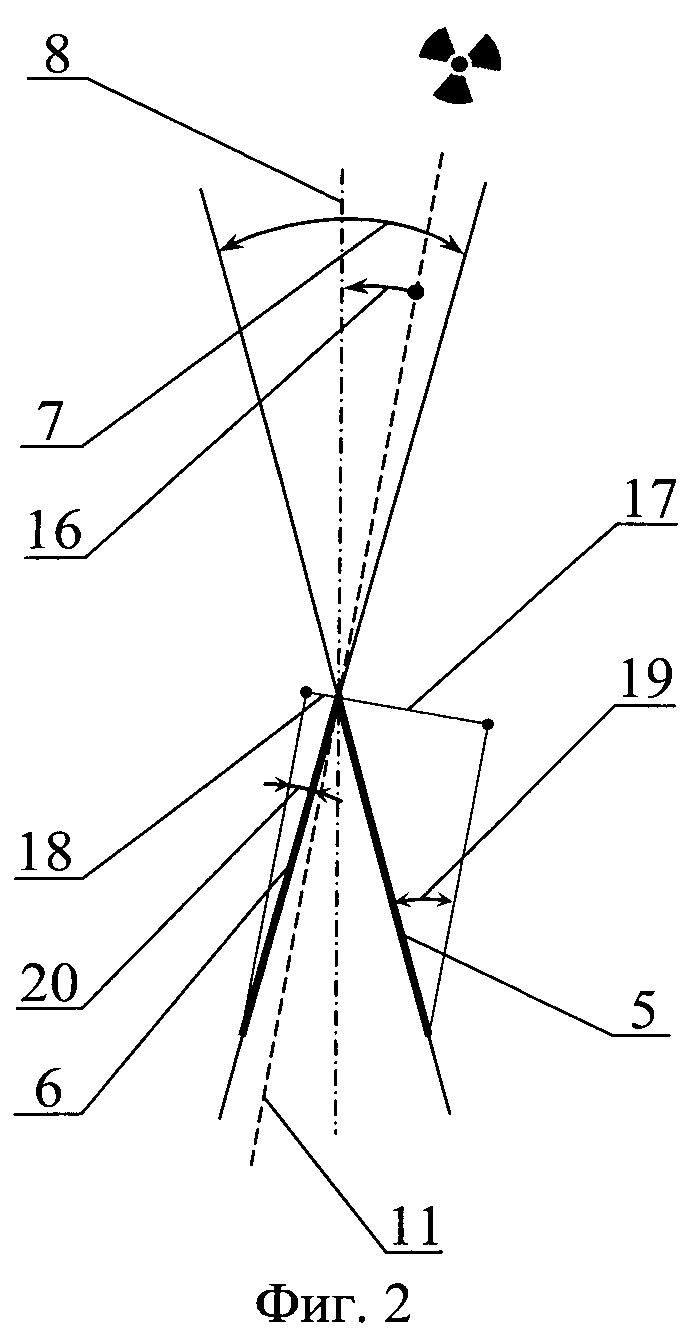
На Фиг.2 (вид сверху) схематично обозначены толстыми линиями входные окна 5 и 6, каждое площадью S, соответственно правого УДR и левого УДL биссектриса 8 угла 2ψ, составляющая угол 16 α с линией-направлением 11 на ИИИ, апертура 17 AR правого УДR и апертура 18 AL левого УДL (апертура - активная облучаемая поверхность входного окна УД, перпендикулярная к направлению 11 на ИИИ).
При наличии в зоне чувствительности УД ИИИ УДR 1 и УДL 2 измеряют количество импульсов за определенное время и затем вычисляют средние скорости счета аддитивной суммы сигнала и радиационного фона. При этом выходные сигналы УДR 12 nR и УДL 13 nL принимают вид:

где:
nCR и nCL - средние скорости счета сигнала от ИИИ без учета скоростей счета фоновых импульсов, вычисленные по информации соответственно от правого УДR и левого УДL
b(t) - средняя скорость счета естественного радиационного фона при отсутствии ИИИ, зависящая от времени t и места измерения;
ΔbR, ΔbL - добавки (среднее значение) к скорости счета фона от влияния ИИИ, вычисленные по информации соответственно от УДR и УДL;
δR и δL - некомпенсированные шумы электроники соответственно УДR и УДL.
Величины сигналов nCR и nCL пропорциональны соответственно апертуре AR17 УДR и апертуре AL 18 УДL.
Из Фиг.2 следует:
AR=S·sinαR, AL=S·sinαL,
где углы αR 19 и αL 20 определяются выражениями:
αR=α+ψ;
αL=α-ψ.
Максимальная скорость счета сигнала от ИИИ для каждого УД (без учета скорости счета фоновых импульсов) при апертуре, равной площади S, определяется выражением:
nmax=KS·S,
где KS - коэффициент пропорциональности.
Выражения для сигналов nCR и nCL примут вид:
nCR=KS·AR=nmax·sinαR=nmax·sin(α+ψ),
nCL=KS·AL=nmax·sinαL=nmax·sin(α-ψ).
Тогда выражения (*) для выходных сигналов 12 nR и 13 nL можно записать в следующем развернутом виде:
nR=nmax·sin(α+ψ)+b(t)+ΔbR+δR=
=nmax·(sinα·cosψ+cosα·sinψ)+b(t)+ΔbR+δR,
nL=-nmax·sin(α-ψ)+b(t)+ΔbL+δL=
=-nmax·(sinα·cosψ-cosα·sinψ)+b(t)+ΔbL+SL.
Следующим шагом реализации способа является вычисление в сравнивающем устройстве 14 разности 15 Δn, которая равна:
Δn=2·nmax·sinα·cosψ+ΔbR-ΔbL+δ,
где обозначено δ=δR-δL.
Как только появляется отличный от нуля разностный сигнал 15 Δn, начинают поворачивать платформу 4 с помощью подключенного к сравнивающему устройству 14 двигателя 21 (Фиг.3). Направление поворота - в зависимости от знака сигнала 15 Δn. При Δn больше нуля (положение платформы 4, показанное на Фиг.1) поворачивают платформу по часовой стрелке в сторону совмещения биссектрисы 8 с направлением 11 на ИИИ. Двигатель 21 будет поворачивать платформу 4 до момента, когда разностный сигнал 15 вновь станет равным нулю. Платформа окажется в положении, показанном на Фиг.3. Курсовой угол цели 22 КУ между нулевой риской 9 и индексом 10, обозначающим осевую линию носителя комплекса, определяет направление на обнаруженный ИИИ. Из-за наличия некомпенсированных шумов электроники УДR и УДL угол КУ будет определен с ошибкой 16, равной αуст. Угол αуст поворота платформы 4, определяемый из равенства нулю сигнала Δn, характеризует статическое положение равновесия следящей системы, на исполнительный двигатель 21 которой подан разностный сигнал 15 Δn. При малых углах α, когда sin α равен углу α, a cos α равен единице, уравнение для определения положения равновесия платформы примет вид (α равно αуст):
Δn=2·nmax·αycm·cosψ+ΔbR-ΔbL+δ=0,
отсюда получаем:

Первый член правой части пренебрежимо мал по сравнению со вторым, так как в положении равновесия оба УД расположены симметрично относительно направления 11 на ИИИ, а УД отбалансированы, поэтому с большой точностью будет выполняться равенство сигналов ΔbR и ΔbL.
Компенсация (отсутствие в разностном сигнале 15 Δn) фона b(t) производится на физическом уровне за счет дифференциальной схемы вычисления An - происходит сравнение реальных сигналов, в результате чего одна из одинаковых составляющих, присутствующая в обоих сравниваемых сигналах, пропадает. В этом заключается одно из главных преимуществ предлагаемого способа. Вследствие компенсации радиационного фона определяющим фактором, влияющим на чувствительность, становится величина δ, представляющая собой некомпенсированные шумы электроники УД и приходящие извне помехи. Она (величина δ) определяет минимальную величину разностного сигнала Δn, при которой выполняют поворот платформы. При надлежащем качестве исполнения УД величина δ практически не превышает 1,5% от средней скорости счета фона b(t), поэтому порог чувствительности может быть определен на уровне 2% от средней скорости счета фона b(t) без учета его флуктуации. При использовании предлагаемого способа ИИИ, добавляющий к скорости счета фона хотя бы два процента, будет обнаружен.
Преимуществом предлагаемого способа является также повышение точности определения направления на обнаруженный источник ИИИ, а следовательно, повышение точности локализации обнаруженного ИИИ. Погрешность определения направления αуст может быть оценена по второму члену правой части равенства (**) на основании экспериментальных данных. При средней скорости счета фона УД 600 с-1 величина порога δ принята равной 2% от фона, т.е. 12 с-1, скорость счета nmax испытуемого УД от точечного источника 137Cs активностью 4,54·104 кБк на расстоянии 6,9 м составила 951 с-1. Величина ошибки в определении направления на обнаруженный источник при этих исходных данных и значении cos 10°, равном 0,985, составляет

При такой погрешности в определении направления на обнаруженный ИИИ обеспечивается достаточно высокая точность локализации источника.
Заключительный этап реализации предлагаемого способа заключается в том, что указанное выше обнаружение ИИИ и определение направления на обнаруженный ИИИ выполняют из другого места, и по точке пересечения двух линий-направлений на обнаруженный ИИИ определяют местоположение ИИИ. Возможен также вариант одновременного определения направлений на обнаруженный ИИИ с двух устройств, работающих по предлагаемому способу, установленных на некотором расстоянии друг от друга в пределах «видимости» ИИИ.
Несомненными преимуществами предлагаемого способа являются простота действий оператора и отсутствие требований к наличию у него (оператора) специальных знаний. Другим преимуществом предлагаемого способа является наличие физической реализации линии-направления на обнаруженный ИИИ, что позволит обеспечить оперативную идентификацию и видеофиксацию местоположения обнаруженного ИИИ установкой на платформу спектрометра и видеокамеры.
Пример 1. Малогабаритный мобильный комплекс радиационного контроля автомобильного базирования.
Комплекс предназначен для поиска, обнаружения и локализации неподвижных источников гамма-излучения по предлагаемому способу.
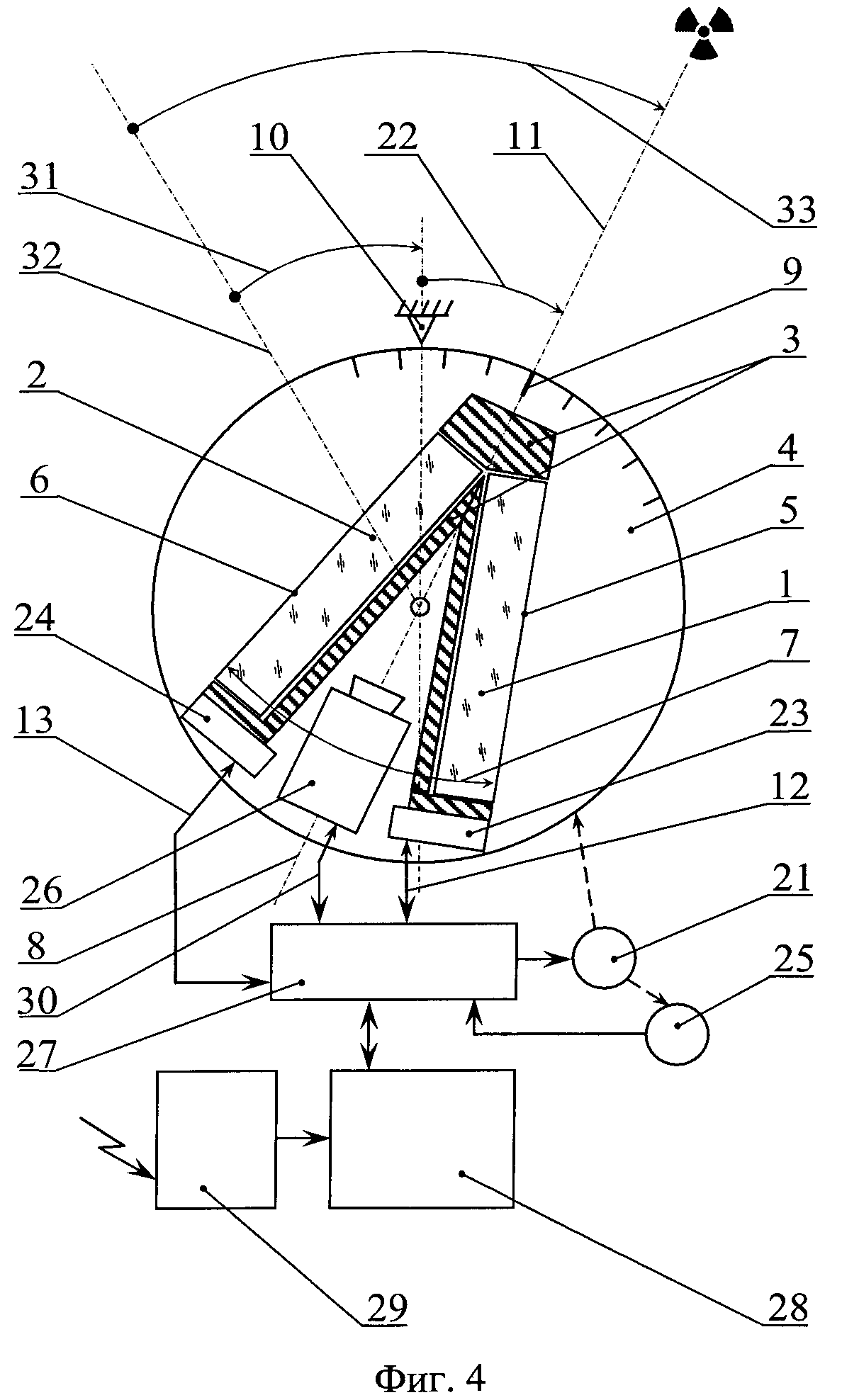
В состав комплекса входят (Фиг.4, вид сверху):
- два одинаковых широкоугольных пластмассовых сцинтилляционных устройства детектирования (УД) - УДR 1 (правый) и УДL 2 (левый), чувствительных к гамма-излучению;
- блоки обработки сигналов 23 и 24, вырабатывающие информацию о средней скорости счета от УДR и УДL соответственно;
- свинцовые экраны-поглотители 3 гамма-квантов;
- поворотная платформа 4, имеющая возможность вращаться относительно вертикальной оси носителя комплекса;
- двигатель 21, кинематически связанный с платформой 4;
- датчик 25 угла 22 КУ поворота платформы 4 относительно вертикальной оси носителя комплекса, кинематически связанный с двигателем 21;
- видеокамера 26, расположенная платформе 4 над УД таким образом, что ее оптическая ось параллельна биссектрисе 8;
- блок управления 27;
- ЭВМ 28;
- приемник спутниковой навигационной системы (СНС) 29.
Вся аппаратура размещается на автомобиле-носителе комплекса (на Фиг.4 не показан). УДR 1 и УДL 2 установлены на платформе 4 таким образом, что их входные окна 5 и 6 направлены в противоположные стороны, образуя острый двугранный угол 7, биссектриса 8 которого проходит через ось вращения платформы 4 и нулевую риску 9. В исходном положении нулевая риска 9 совмещена с индексом 10, расположенным на продольной осевой линии носителя. На платформе 4 установлена видеокамера 26, обеспечивающая видеофиксацию процесса локализации обнаруженного источника гамма-излучения. Угловое положение платформы 4 (нулевой риски 9) относительно продольной оси носителя комплекса (индекса 10) регистрирует датчик угла 25.
Блок управления 27 решает следующие задачи:
- получает информацию о средних скоростях счета 12 УДR и 13 УДL, вырабатывает разностный сигнал 15 Δn, на основании которого формирует сигналы управления двигателем 21;
- реализует интерфейс обмена 30 между видеокамерой 26 и ЭВМ 28;
- получает от датчика угла 25 информацию о курсовом угле цели 22 КУ и передает ее в ЭВМ 28;
- формирует и передает в ЭВМ 28 сигнал об обнаружении источника гамма-излучения;
- по команде от ЭВМ 28 принудительно переводит поворотную платформу в исходное положение, при котором риска 9 совпадает с индексом 10.
Работа комплекса предусмотрена по обоим бортам носителя. Диапазон курсовых углов цели ±180°, от носа на правый борт (по часовой стрелке) - положительное значение курсового угла цели, на левый борт (против часовой стрелки) - отрицательное значение курсового угла цели. Направление на цель (обнаруженный источник гамма-излучения) определяется устройством автоматически как при неподвижном, так и при подвижном комплексе.
Работа комплекса происходит следующим образом. По прибытии в зону контроля оператор дает команду «ПОИСК». Момент захвата неподвижной цели (неподвижного источника гамма-излучения) комплексом оператор определяет по изменению курсового угла цели 22 и по сигналу, вырабатываемому блоком управления 27. При значении курсового угла цели 22, например (+30°…+40°), что соответствует обнаружению ИИИ по правому борту, оператор дает команду на остановку носителя комплекса. В компьютере фиксируется курс носителя 33 К1 до остановки, координаты носителя и, после окончания переходного процесса, фиксируется курсовой угол цели 22 Ку1. После определения в первом замере курсового угла Ку1 обнаруженного ИИИ эта информация с датчика угла 25 передается в компьютер 28, где суммируется с учетом знака с углом курса 31 K1 носителя, полученным по данным СНС. В результате определяется пеленг 33 П1 (угол между направлением на географический север 32 и направлением 11 на цель) на ИИИ в точке 1:
П1=К1+Ку1.
На карте местности, заложенной в компьютер, средствами программного обеспечения наносится пеленг П1 на обнаруженный ИИИ. Далее по команде оператора комплекс перемещается в направлении, примерно перпендикулярно полученному в первом замере направлению на цель, насколько это позволяют условия местности, для проведения измерений в точке 2. По алгоритму, рассмотренному выше, определяется и наносится на карту пеленг П2. Точка пересечения линий пеленгов П1 и П2 определяет координаты цели - местоположения обнаруженного ИИИ. При стоянках в точках 1 и 2, а также при перемещении из 1 в 2 видеокамера постоянно направлена на обнаруженный источник гамма-излучения. Если рядом с видеокамерой соосно установить гамма-спектрометр, то решаются дополнительные задачи по идентификации (определения радионуклидного состава) обнаруженного источника гамма-излучения и по оценке количества радиоактивных веществ (РВ) в обнаруженном источнике.
Пример 2. Стационарный комплекс поиска, обнаружения и локализации перемещающихся источников гамма-излучения.
Комплекс предназначен для работы на контрольно-пропускных пунктах (КПП), пунктах таможенного контроля, для мониторинга подъездов к железнодорожным и автомобильным тоннелям и мостам. На Фиг.5 показана схема расположения комплекса на КПП. Комплекс состоит из ЭВМ 28, сопряженной с двумя одинаковыми модулями 35 и 36, располагаемыми с внешней стороны шлагбаума 37 по обе стороны дороги. Каждый модуль аналогичен по составу и по связям комплексу, изображенному на Фиг.4, за исключением приемника СНС 29, который в виде слота установлен в ЭВМ 28. При появлении источника гамма-излучения в зоне чувствительности модулей 31 и 32 автоматически включаются видеокамеры 26, двигатели 21 начнут разворачивать свои платформы 4 вместе с видеокамерами 26 в направлении обнаруженного источника. На мониторе ЭВМ 26 появится сигнал тревоги и два видеоизображения приближающегося носителя с источником гамма-излучения. Если видимость ограничена, комплекс отобразит линии-направления 11 на обнаруженный источник гамма-излучения на электронной карте местности средствами программного обеспечения. Перекрестье линий 11 даст координаты источника. Как и в примере 1, на платформе одного из модулей 35 или 36 соосно с видеокамерой можно установить гамма-спектрометр (не показан) для решения задачи идентификации.
Комплекс позволяет, таким образом, заблаговременно предупредить персонал о приближении источника радиоактивного излучения.
Способ поиска, обнаружения и локализации (определения местоположения) источников ионизирующих излучений (ИИИ) путем определения точки пересечения обнаруженных линий-направлений на ИИИ из двух различных мест с использованием устройств детектирования, снабженных экранами-поглотителями излучения, и поворотной платформы, кинематически связанной с двигателем, отличающийся тем, что измеряют каждым из не менее двух установленных на платформе одинаковых широкоугольных устройств детектирования с направленными в противоположные стороны входными окнами, образующими острый двугранный угол, средние скорости счета аддитивной суммы сигнала и фона, вычисляют разность полученных значений скоростей счета, ненулевое значение которой означает факт обнаружения ИИИ, поворотом платформы с помощью двигателя достигают минимума этой разности, а по углу поворота платформы определяют направление на обнаруженный ИИИ.
Способ секвенирования днк и устройство для его осуществления (варианты)
Способ поиска источников ионизирующих излучений
Способ обнаружения и локализации подвижных источников ионизирующих излучений
Способ секвенирования днк и устройство для его осуществления (варианты)

