Результат интеллектуальной деятельности: МАЛОГАБАРИТНАЯ УПРАВЛЯЕМАЯ ВРАЩАЮЩАЯСЯ РАКЕТА
Вид РИД
Изобретение
Изобретение относится к управляемым вращающимся ракетам.
Известно устройство для управления траекторией полета снаряда, патент США 6629668 BA, класс НКИ 244-3.22, опубликован 7.10.03 г. Для корректировки траектории движения снаряда после старта, используют бортовые акселерометры, которые установлены ортогонально вдоль продольной оси снаряда. Нежелательные отклонения от заданной траектории корректируются путем срабатывания импульсных двигателей по сигналам с акселерометров, преобразованным в бортовой электронной аппаратуре в команды управления. Импульсные двигатели установлены на периферийной поверхности корпуса снаряда. Такое управление траекторией движения снаряда позволяет увеличить дальность стрельбы подобными снарядами из артиллерийских орудий.
Однако срабатывание импульсных двигателей, необходимых для корректировки траектории движения, является значительным возмущающим фактором, приводящим к дополнительным колебаниям снаряда. При стрельбе на большие дальности это влечет за собой увеличение рассеивания и большие промахи при подходе снаряда к цели.
Известно устройство (Патент РФ № RU 2438095, МПК F42B 10/00, 2010 г.), выбранное в качестве прототипа, управляемый вращающийся снаряд, содержащий электронную аппаратуру управления, органы управления траекторией полета и чувствительные элементы отклонения снаряда от заданной траектории, отличающееся тем, что органы управления выполнены в виде аэродинамических рулей, а чувствительные элементы скомпонованы на базе двух микромеханических гироскопов, размещенных на двух взаимно перпендикулярных платах с установленными на них радиоэлементами, обеспечивающими совмещение сигналов микромеханических гироскопов, поступающих в электронную аппаратуру управления, с ее собственными сигналами, которые поступают на органы управления, при этом платы закреплены на общем основании, установленном перпендикулярно продольной оси снаряда X так, что чувствительные оси микромеханических гироскопов перпендикулярны друг другу и съюстированы с соответствующими поперечными осями Y и Z снаряда, причем основание развернуто в направлении вращения снаряда относительно аэродинамических рулей на угол, величина которого эквивалентна времени формирования команд для органов управления.
В данном устройстве осуществляется демпфирование колебаний снаряда по двум перпендикулярным осям сигналами с инерциального измерительного модуля, содержащего два датчика угловых скоростей с взаимно перпендикулярными измерительными осями, которые после определенной обработки и преобразования поступают в бортовую аппаратуру снаряда, где происходит их алгебраическое суммирование с основными сигналами управления. При таком формировании управляющих команд угловые колебания снаряда преобразуются в затухающие, уменьшается лобовое сопротивления снаряда, увеличивается дальность стрельбы и вероятность попадания снаряда в цель.
Недостатком данного устройства является недостаточная точность наведения ракеты на начальном участке, обусловленная влиянием на датчики угловых скоростей линейного ускорения при работе разгонного двигателя ракеты и центробежным ускорением при изменении скорости вращения ракеты.
Целью предлагаемого изобретения является повышение точности наведения ракеты на всей траектории полета за счет компенсации погрешности датчиков.
Данная цель решается за счет того, что в заявленной малогабаритной управляемой вращающейся ракете, содержащей электронную аппаратуру управления, органы управления, выполненные в виде аэродинамических рулей, и инерциальный измерительный модуль, содержащий чувствительные элементы отклонения ракеты от заданной траектории на базе микромеханических гироскопов, инерциальный измерительный модуль содержит три одноосных микромеханических гироскопа (ММГ) и двухосный датчик линейных ускорений (ДЛУ), размещенные на общей плате, установленной перпендикулярно продольной оси X вращения ракеты, причем чувствительная ось первого ММГ смещена на 40÷45° относительно поперечной оси Z ракеты, оси второго и третьего ММГ смещены на ±120° относительно первого ММГ, измерительные оси двухосного ДЛУ взаимно перпендикулярны и перпендикулярны продольной оси X вращения ракеты и одна из них совпадает с измерительной осью первого ММГ, а в состав электронной аппаратуры управления дополнительно введен микроконтроллер, информационные входы которого соединены с выходами ММГ и ДЛУ, датчик температуры и энергонезависимое перепрограммируемое запоминающее устройство микроконтроллера.
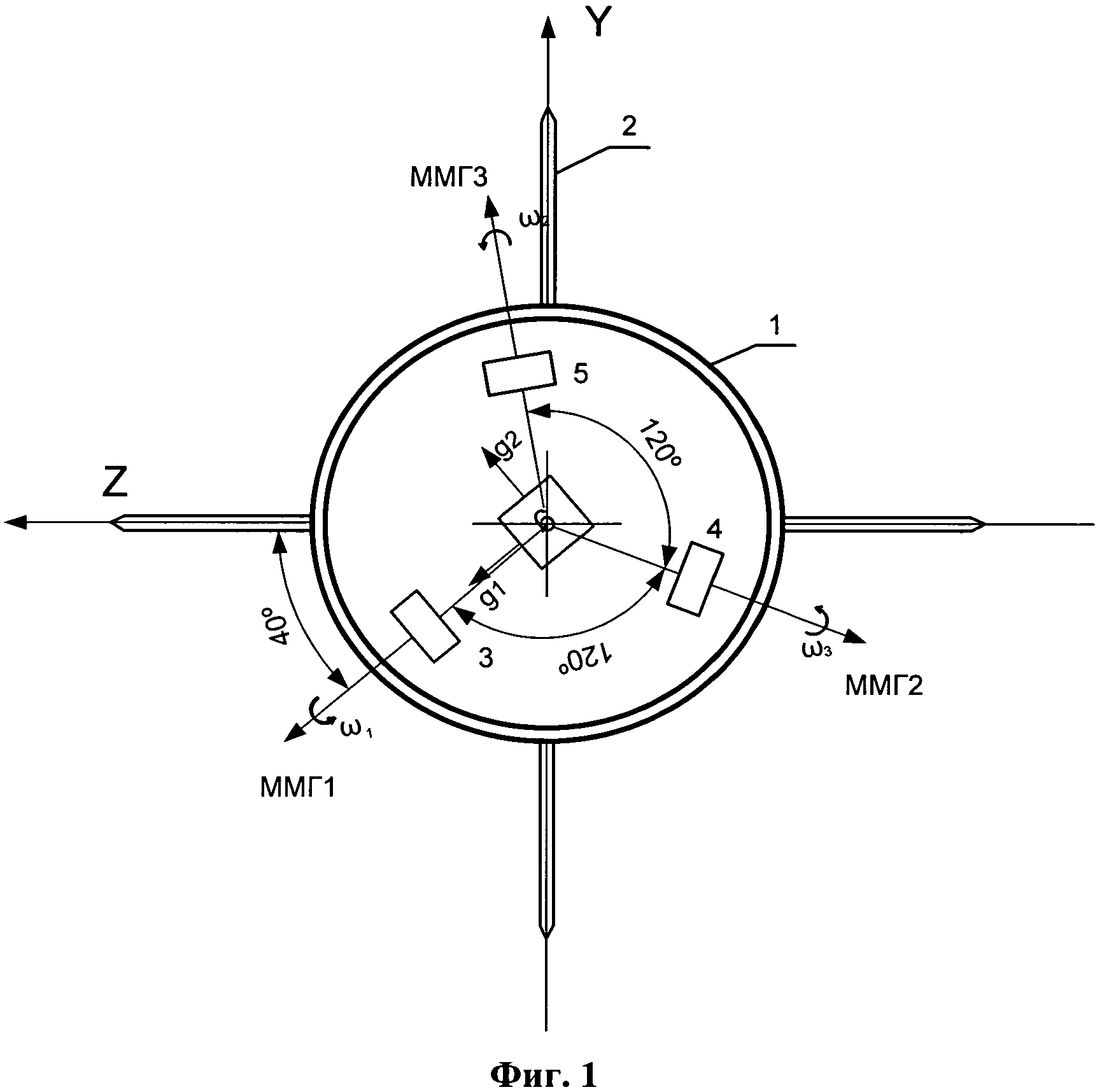
Предлагаемое изобретение поясняется графическим материалом - фиг. 1 и фиг. 2, где на фиг. 1 представлена схема взаимного расположения измерительных осей микромеханических ММГ и ДЛУ инерциального измерительного модуля относительно рулей ракеты, на фиг. 2 - функциональная схема электронной аппаратуры:
1 - корпус ракеты;
2 - аэродинамические рули;
3, 4 и 5 - первый, второй и третий ММГ, например, типа ADXSR450 фирмы Analog Devices;
6 - двухосный ДЛУ, например, типа ADXL278 фирмы Analog Devices;
7 - датчик температуры, например, встроенный датчик температуры ММГ типа ADXSR450 фирмы Analog Devices;
8 - микроконтроллер, например, 32-разрядный микроконтроллер семейства ARM Соrtex-M3;
9 - энергонезависимое запоминающее устройство, например встроенное перепрограммируемое запоминающее устройство микроконтроллера (ППЗУ).
Устройство работает следующим образом.
Вследствие колебательных и вращательных движений ракеты на траектории в чувствительных элементах ММГ и ДЛУ возникают электрические сигналы, которые пропорциональны проекциям угловых скоростей и линейных ускорений на измерительные оси датчиков. Для замера угловых скоростей относительно трех осей X, Y и Z ракеты необходимо из принципа достаточности иметь как минимум три датчика с произвольным неортогональным расположением измерительных осей. Любое сложное движение ракеты, с установленным на ней ММГ, можно представить как вращение относительно трех осей X, Y и Z, тогда при сложном движении сигнал А1, снимаемый с первого ММГ, можно записать в виде уравнения:
A1=νx·A2+νy·A3+νz·A4, где
A1 - показания первого ММГ;
A2 - косинус угла между осью датчика и осью X;
A3 - косинус угла между осью датчика и осью Y;
A4 - косинус угла между осью датчика и осью Z;
νx νy νz - составляющие скоростей вращения относительно осей X, Y и Z.
Аналогично можно записывать уравнения, отражающие показания второго и третьего ММГ:
A5=νx·A6+νy·A7+νz·A8;
A9=νx·A10+νy·A11+νz·A12.
Таким образом описание всех трех ММГ можно свести в единую систему уравнений (матрицу):
A1=νx·A2+νy·A3+νz·A4
A5=νx·A6+νy·A7+νz·A8
A9=νx·A10+νy·A11+νz·A12.
Для нахождения решения значений угловых скоростей относительно каждой из осей ракеты, кроме показаний датчиков ММГ А1, A5, А9, необходимо знать остальные коэффициенты матрицы A2, A3, A4, A6, A7, A8, A10, A11, A12 (косинусы углов между измерительными осями датчиков и осями ракеты X, Y и Z). Неизвестные коэффициенты могут быть определены с помощью поочередной тарировки ММГ вращением аппаратурного отсека ракеты относительно каждой из осей на заранее известной скорости. И тогда матрица, описывающая сигналы ММГ, при вращении относительно оси X примет вид:
A1=νx·A2;
A5=νx·A6;
A9=νx·A10.
Из этих трех уравнений однозначно определяются коэффициенты A2, A6, A10 (при идеальной перпендикулярности осей ММГ они должны равняться нулю, однако из-за монтажной ошибки установки, достигающей ±1° и большей угловой скорости вращения ракеты, они отличны от нуля и подлежат учету при вычислении).
Аналогично проводя тарировочные операции отсека аппаратуры ракеты относительно двух других осей Y и Z, определяются остальные недостающие коэффициенты матрицы A3, A4, A7, A8, A11 и A12, которые заносятся во встроенное энергонезависимое ППЗУ микроконтроллера.
Искомые значения угловых скоростей ракеты при любом сложном движении определяются уравнениями:
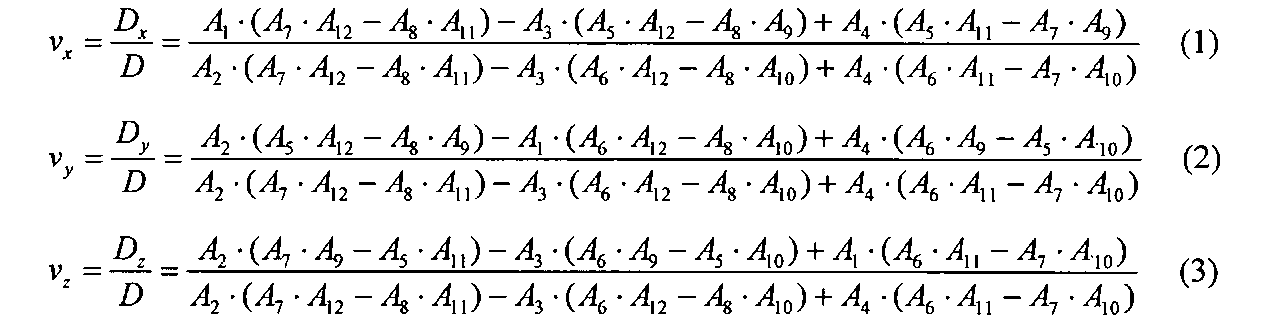
где коэффициенты:
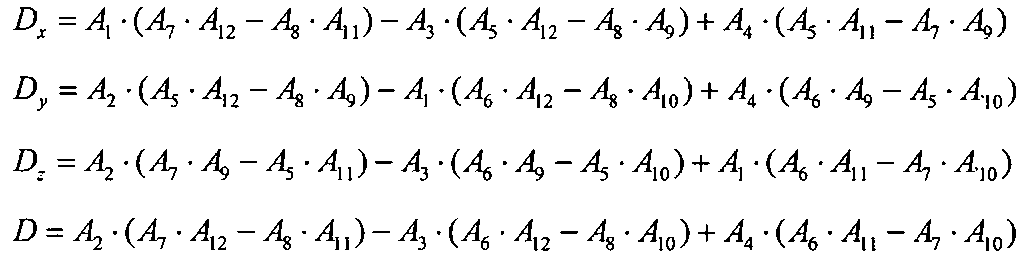
Зависимости (1), (2) и (3), по которым рассчитываются значения угловых скоростей ракеты, заносятся в управляющую программу микроконтроллера, коэффициенты A2, A3, A4, A6, A7, A8, A10, A11, A12, которые отражают геометрию реального расположения осей ММГ к исполнительным осям ракеты, также заносятся во встроенное ППЗУ микроконтроллера.
Вторая составляющая ошибки инерциального измерительного модуля, вызванная собственными ненулями ММГ и их температурным дрейфом, компенсируется температурной тарировкой в рабочем диапазоне температур ракеты с использованием встроенного датчика температуры. Наличие датчика ДЛУ позволяет компенсировать ошибку, вызванную влиянием линейных ускорений при управлении ракетой.
Таким образом, использование в контуре управления малогабаритной управляемой ракеты инерциального измерительного модуля с неортогональным расположением измерительных осей ММГ и датчиков ДЛУ, позволяет учитывать и компенсировать рассеивание ракеты на начальном участке наведения и осуществлять активное демпфирование колебаний на траектории, что обеспечивает устойчивое наведение ракеты, при наличии возмущающих факторов и, следовательно, повышает точность наведения и увеличивает дальность стрельбы управляемой ракетой.
Малогабаритная управляемая вращающаяся ракета, содержащая электронную аппаратуру управления, органы управления, выполненные в виде аэродинамических рулей, и инерциальный измерительный модуль, содержащий чувствительные элементы отклонения ракеты от заданной траектории на базе микромеханических гироскопов, размещенных на общей плате, установленной перпендикулярно продольной оси X вращения ракеты, отличающаяся тем, что инерциальный измерительный модуль содержит три одноосных микромеханических гироскопа и двухосный датчик линейных ускорений, причем чувствительная ось первого микромеханического гироскопа смещена на 40÷45° относительно поперечной оси Z ракеты, оси второго и третьего микромеханических гироскопов смещены на ±120° относительно измерительной оси первого микромеханического гироскопа, а измерительные оси двухосного датчика линейных ускорений взаимно перпендикулярны и перпендикулярны продольной оси X вращения ракеты и одна из них совпадает с измерительной осью первого микромеханического гироскопа, а в состав электронной аппаратуры управления дополнительно введены микроконтроллер, информационные входы которого соединены с выходами микромеханических гироскопов и датчика линейных ускорений, датчик температуры и энергонезависимое перепрограммируемое запоминающее устройство микроконтроллера.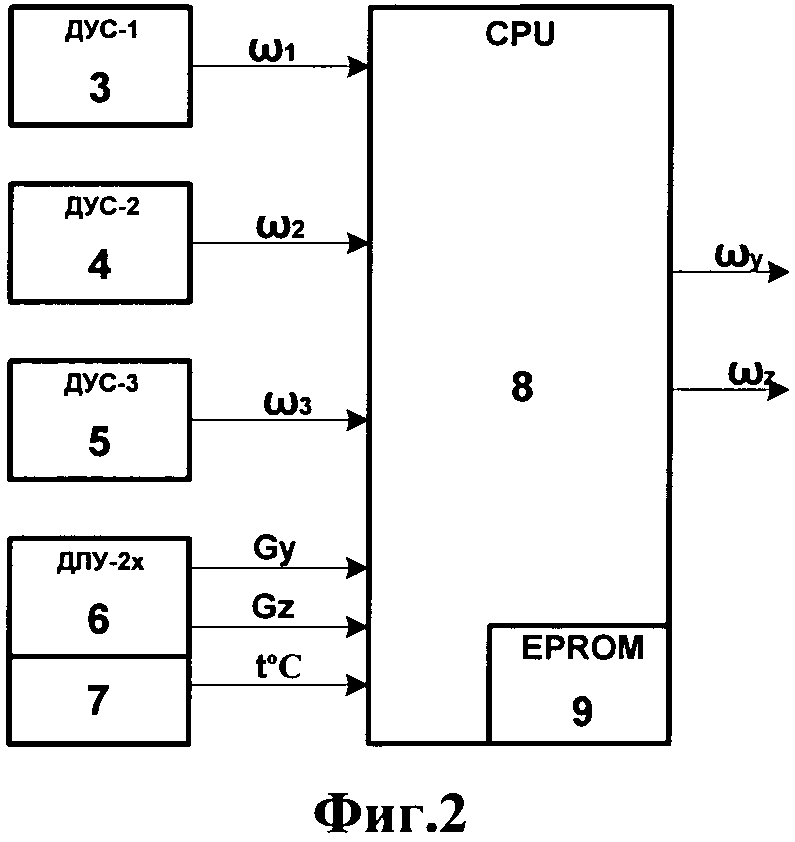
Преобразователь "угол-код" индукционного датчика угла
Ракетный двигатель твердого топлива
Способ стрельбы танковым управляемым реактивным снарядом раздельного заряжания и снаряд для его реализации

