Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА
Вид РИД
Изобретение
Изобретение относится к области гироскопического приборостроения и может быть использовано в геодезии, навигации, топографии, системах прицеливания и наведения.
Известен способ определения азимута на основе свойств одноосных волоконно-оптических гироскопов (ВОГ), при осуществлении которого измеряют проекцию горизонтальной составляющей скорости вращения Земли на ось чувствительности гироскопа. На выходе гироскопа получают синусоидальный сигнал, в котором нулевые значения соответствуют направлениям на восток или запад, а максимум и минимум - на север и на юг. Амплитуда этого сигнала пропорциональна горизонтальной составляющей скорости вращения Земли, а его фаза определяет положение оси чувствительности гироскопа относительно плоскости меридиана [В.Е. Прилуцкий, В.Г. Пономарев, В.Г. Марчук и др. «Интерферометрические волоконно-оптические гироскопы с линейным выходом» // Научно-технический журнал «Гироскопия и навигация», №3 (46), 2004, стр. 62-68].
Недостатком данного способа является сложность установления моментов времени, когда фаза выходного сигнала соответствует нулевому, максимальному или минимальному значению, что влияет на точность определения азимута в эти моменты.
Кроме этого, измерение угловой скорости вращения Земли в данном способе требует использования дополнительного оборудования, а именно двигателя, предназначенного для обеспечения равномерного вращения гироскопа вокруг оси, и датчика измерения угла отклонения оси чувствительности гироскопа от продольной оси объекта, что усложняет измерения, необходимые для определения азимута.
Наиболее близким по технической сущности к заявляемому способу является способ определения азимута [Патент РФ на изобретение №2098766], взятый за прототип, включающий предварительную выставку оси чувствительности гироскопа (гироскопического датчика угловой скорости) и выполнение серии поворотов на заданные углы, определение показаний гироскопа на заданных углах и вычисление азимута с использованием полученных показаний.
Известный способ аналитического гирокомпасирования позволяет при измерении угловой скорости вращения Земли производить автокомпенсацию систематических погрешностей, обусловленных дрейфом нуля и отклонением масштабного коэффициента гироскопического датчика угловой скорости (гироскопа).
Недостатком известного способа являются значительные погрешности при определении азимута, связанные с влиянием структуры шумов гироскопа (например, ВОЕ) различной природы и значительное время определения азимута. Одним из способов идентификации структуры шумов является построение вариации Аллана [IEEE Std 952-1997. IEEE Standard Specification Format Guide and Test Procedure for Single-Axis Interferometric Fiber Optic Gyros], [Кробка Н.И. Дифференциальные методы идентификации структуры шумов гироскопов // Еироскопия и навигация. - 2011. - №1]. В общем случае при анализе вариации Аллана рассматриваются: коэффициент влияния шума квантования сигнала (коэффициент влияния белого шума в угле), коэффициент влияния белого шума в угловой скорости (коэффициент влияния случайного углового ухода), коэффициент нестабильности смещения нуля, коэффициент влияния белого шума в угловом ускорении (коэффициент влияния случайного ухода угловой скорости), коэффициент влияния тренда угловой скорости (коэффициент влияния линейного изменения угловой скорости).
На точность гирокомпасирования влияют перечисленные выше параметры, а также изменение систематической составляющей скорости дрейфа от запуска к запуску. Метод, применяемый в известном способе, за счет автокомпенсации позволяет исключить влияние изменения систематической составляющей скорости дрейфа гироскопа от запуска к запуску, а также минимизировать влияние трендов скорости дрейфа. При этом требования ко времени выполнения автокомпенсации предъявляются не в полной мере, так как не учитывается структура шумов гироскопа.
Степень компенсации влияния тренда угловой скорости определяется как величиной самого тренда с одной стороны, так и промежутками времени между соседними измерениями в положениях на заданных углах с другой. Погрешность автокомпенсации тем больше, чем дальше отстоят друг от друга середины интервалов измерений, соответствующие в первом приближении средним показаниям гироскопа (датчика угловой скорости) на интервале измерения, и чем сильнее наклон линии тренда. При заданном времени определения азимута середины интервалов измерений отстоят друг от друга тем дальше, чем меньше количество положений, в которых проводится определение показаний датчика угловой скорости (чем больше время одного измерения).
Влияние случайного шума и случайного ухода связано со временем усреднения при проведении измерений. Чем больше время усреднения, тем меньше влияние указанных величин. При заданном времени гирокомпасирования суммарное время усреднения сигнала гироскопа составляет часть времени определения азимута без учета времени на выполнение поворотов, которое тем больше, чем больше используется положений для определения показаний гироскопа.
Таким образом, в известном способе определения азимута с поворотами гироскопа возможна оптимизация времени измерения в каждом положении гироскопа (или, что то же самое, оптимизация количества измерений при заданном времени гирокомпасирования) с целью получения минимальной ошибки и минимального времени определения азимута при применении автокомпенсации на основе анализа структуры шумов гироскопа.
Техническим результатом заявляемого изобретения является повышение точности и сокращение времени определения азимута.
Указанный технический результат достигается тем, что в известном способе определения азимута, включающем предварительную выставку оси чувствительности гироскопа и выполнение поворотов оси чувствительности гироскопа на заданные углы, определение показаний гироскопа на заданных углах и вычисление азимута с использованием полученных показаний, согласно изобретению измеряют время поворота гироскопа в каждое положение на заданный угол, определяют суммарное время измерения показаний гироскопа во всех положениях с учетом времени определения азимута, после чего определяют значения минимального необходимого времени измерения показаний в каждом положении оси чувствительности гироскопа и минимального необходимого количества измерений при заданном времени определения азимута.
Изобретение поясняется чертежами, на которых представлены:
фиг. 1 - графики, иллюстрирующие процесс автокомпенсации линейного тренда при гирокомпасировании в 2-х и в 4-х положениях;
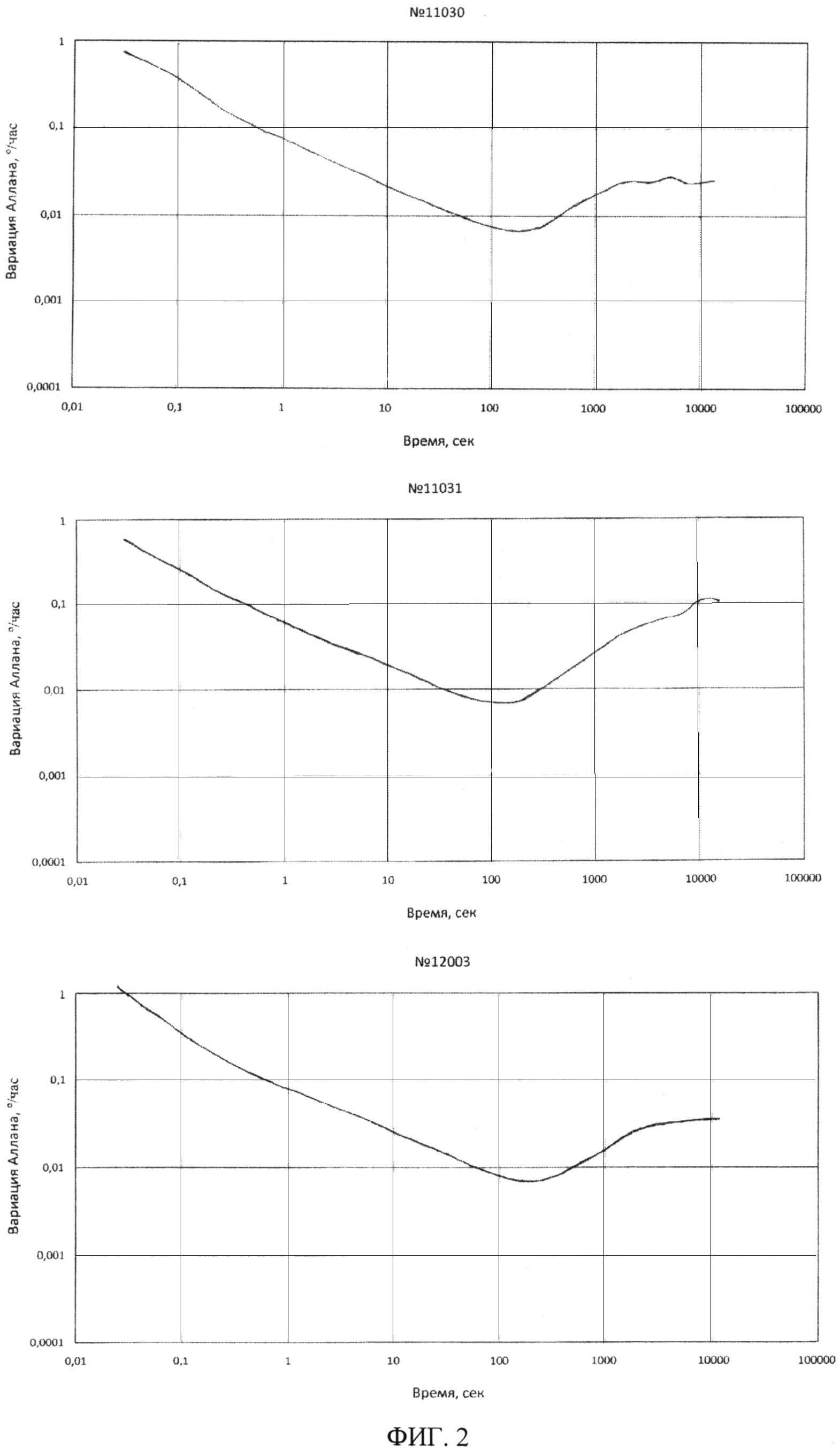
фиг. 2 - примеры построения (графики) вариаций Аллана;
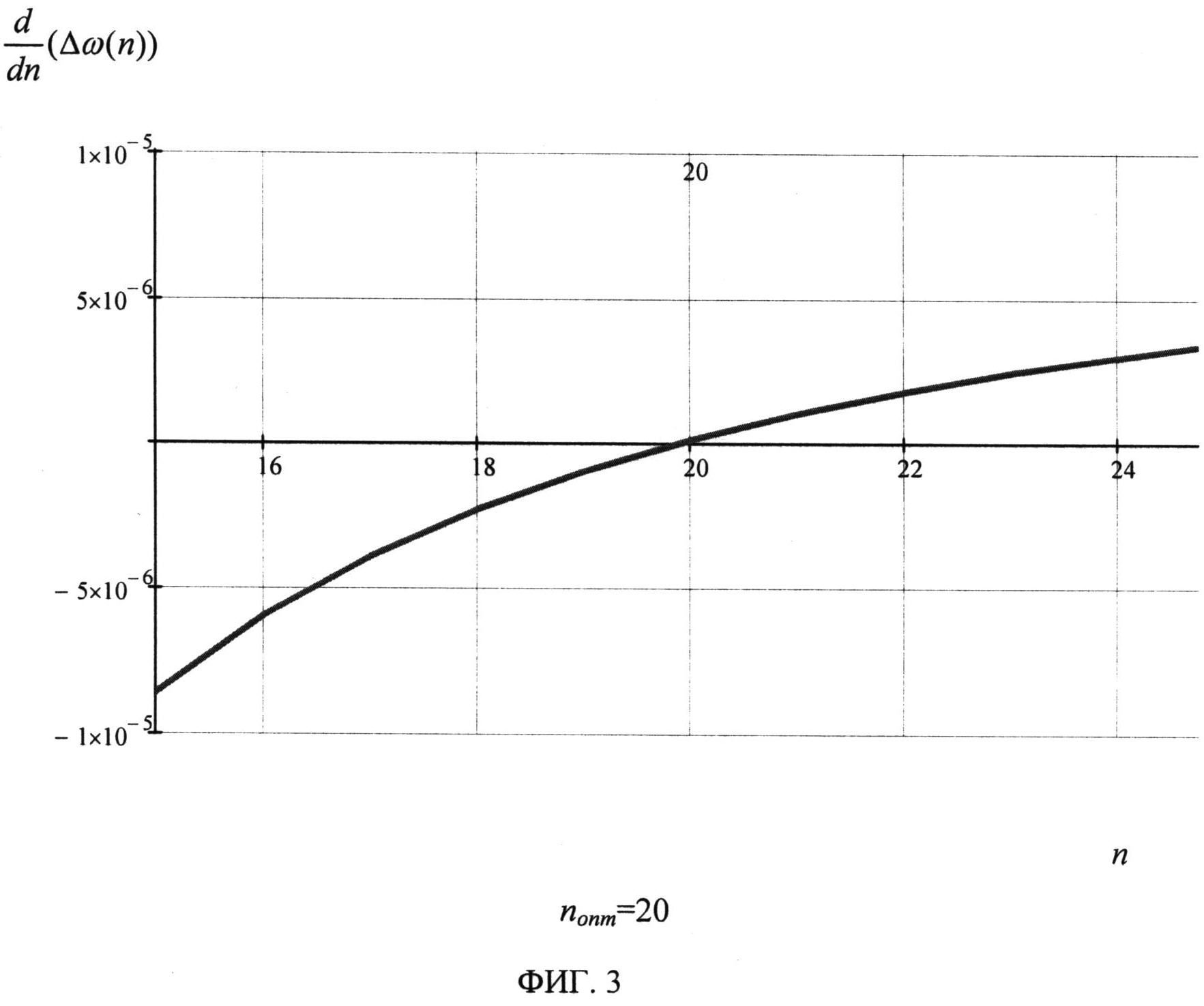
фиг. 3 - пример графика оптимизации процесса определения азимута;
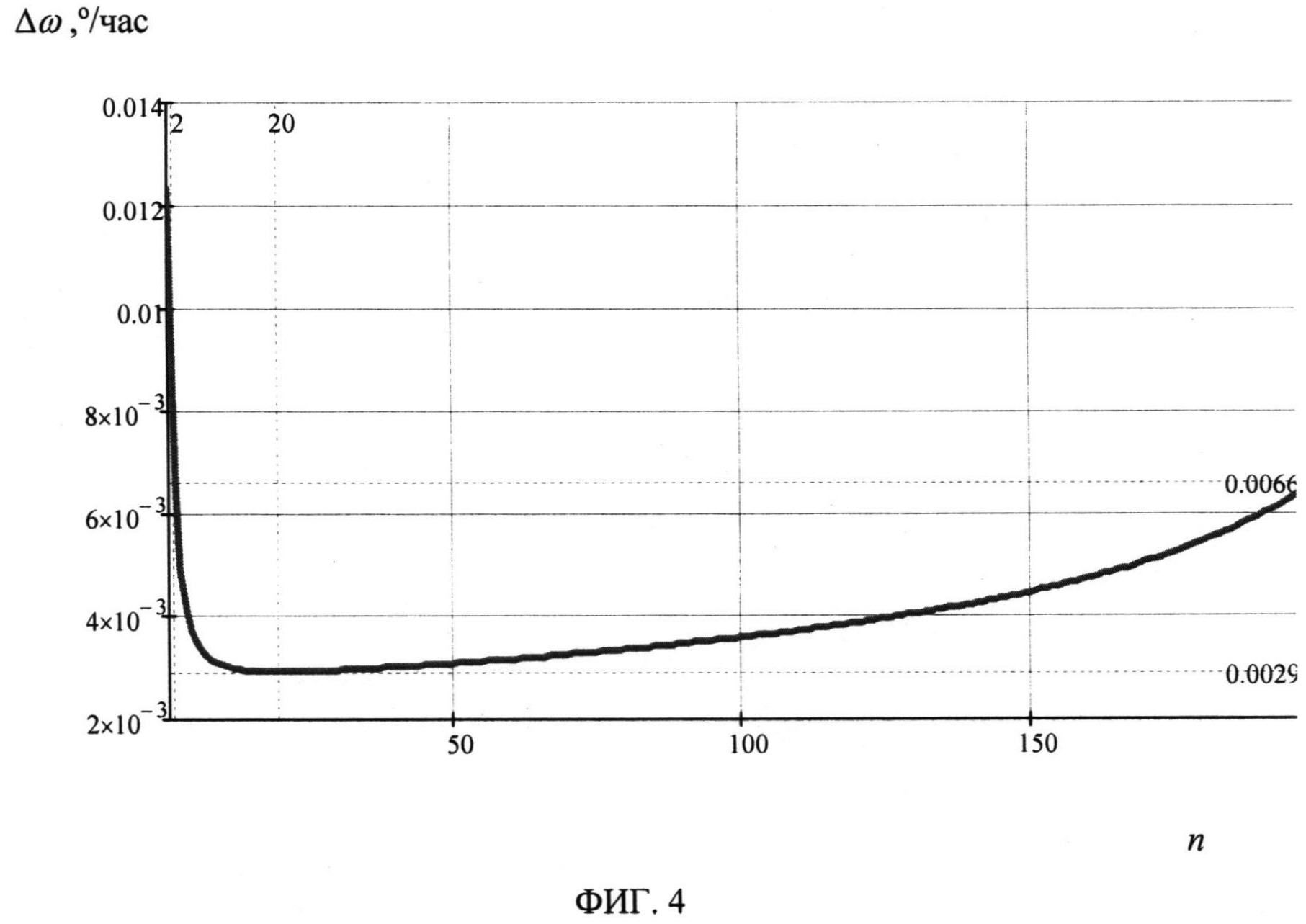
фиг. 4 - ошибка Δω измерения угловой скорости гироскопом при оптимизации процесса определения азимута после определения параметров вариации Аллана и автокомпенсации в зависимости от количества измерений n.
Для определения азимута ψ с помощью гироскопа (датчика угловой скорости) заявляемым способом осуществляют предварительную выставку оси чувствительности гироскопа в плоскость горизонта, после чего ось чувствительности серией поворотов на заданные углы устанавливают в различные положения в азимуте, таким образом, чтобы осуществлялась автокомпенсация систематических погрешностей, обусловленных дрейфом нуля гироскопа. В известных методах автокомпенсации используют два, отличающихся на 180°, три или четыре, отличающихся на 90°, и более положений оси чувствительности гироскопа. Методы, использующие более 2-х положений для измерения, наряду с автокомпенсацией систематического дрейфа нуля гироскопа, позволяют исключить влияние отклонения масштабного коэффициента. В методах, использующих более 3-х положений, дополнительно может быть минимизировано влияние погрешности предварительной выставки оси чувствительности гироскопа в плоскость горизонта.
При реализации заявляемого способа определение значений минимального необходимого времени измерения показаний в каждом положении оси чувствительности гироскопа и минимального необходимого количества измерений при заданном времени определения азимута с целью достижения заявленного технического результата может производиться следующим образом.
Проводят измерение параметров гироскопа с получением вариации Аллана. Различные участки полученной зависимости определяют различные составляющие структуры шумов гироскопа. При анализе вариации Аллана рассматриваются: участок с типичным наклоном µ=-1 - влияние шума квантования сигнала (белый шум в угле), с наклоном µ=-1/2 - влияние белого шума в угловой скорости, горизонтальный участок µ=0 - нестабильность смещения нуля, с наклоном µ=+1/2 - влияние белого шума в угловом ускорении (случайный уход угловой скорости), с наклоном µ=+1 - влияние тренда угловой скорости [Кробка Н.И. Дифференциальные методы идентификации структуры шумов гироскопов // Гироскопия и навигация. - 2011. - №1, с. 66]. В ходе анализа устанавливается, как различные составляющие вариации Аллана (структуры шумов гироскопа) влияют на получаемую ошибку измерения угловой скорости вращения Земли гироскопом и, следовательно, на точность определения азимута, с увеличением времени измерения (усреднения) сигнала гироскопа. Обычно составляющие, влияние которых уменьшается с увеличением времени усреднения сигнала, - это шум квантования и белый шум в угловой скорости. Составляющие, влияние которых увеличивается с увеличением времени усреднения сигнала, - шум в угловом ускорении (случайный уход угловой скорости) и тренд угловой скорости. Вклад нестабильности смещения нуля гироскопа в ошибку определения азимута, как следует из вариации Аллана, с увеличением времени усреднения сигнала остается постоянным.
Влияние осреднения учитывается за суммарное время измерения во всех положениях, при этом процесс гирокомпасирования приводится к однопозиционному путем пересчета всех измерений на заданных углах оси чувствительности гироскопа к начальному положению и «сшивки» полученных результатов, откорректированных на величину постоянной составляющей измерений на каждом угле, в единую последовательность.
Для определения суммарного времени измерения сигнала определяют время поворота гироскопа tразв в каждое положение на заданный угол. Для большинства практических алгоритмов определения азимута обычно применяются одинаковые углы поворота оси чувствительности, например, для гирокомпасирования в 2-х положениях - 180°, для гирокомпасирования в 3-х и 4-х положениях - 90° и т.д. При этом повороты выполняются последовательно, а время разворота tразв одинаковое для всех положений оси чувствительности гироскопа.
В этом случае суммарное время τ измерения во всех положениях без учета времени поворотов равно

где n - количество положений для проведения измерений, tизм - время измерения в одном положении, tГК - время определения азимута.
Влияние оцененных параметров вариации Аллана и времени измерения (времени усреднения) сигнала в каждом положении оси чувствительности гироскопа на ошибку гироскопа после автокомпенсации и, следовательно, на точность и время определения азимута, зависит от количества поворотов на заданные углы и времени одного измерения. При фиксированном времени определения азимута обе последние величины зависят от друг от друга. При оптимуме обеих величин время и ошибка определения азимута будут минимальны.
С учетом аппроксимирующего выражения для зависимости изменения вариации Аллана от времени осреднения влияние параметров структуры шумов на ошибку гироскопа определяется следующим выражением:

где R, K, N, Q - оцениваемые параметры аппроксимирующего выражения вариации Аллана, при этом: Q - коэффициент шума квантования (учитывая, что время осреднения значительно и равно времени гирокомпасирования за вычетом времени поворотов, влияние высокочастотной составляющей Q может не рассматриваться), N - коэффициент влияния белого шума в угловой скорости (коэффициент влияния случайного углового ухода), К - коэффициент влияния белого шума в угловом ускорении (коэффициент влияния случайного ухода угловой скорости), R - коэффициент влияния тренда угловой скорости, Δτ - время между серединами соседних интервалов измерений.
Функция влияния параметров вариации Аллана на ошибку Δψ определения азимута имеет вид:

где ΩЗ - угловая скорость вращения Земли, φ - широта места. В случае если гирокомпасирование проводится несколькими гироскопами, Δψ(τ,Δτ)=F(Δω1(τ,Δτ),Δω2(τ,Δτ),…).
В выражении (2) отсутствует составляющая В - коэффициент нестабильности смещения нуля, в виду того, что его влияние в процессе автокомпенсации не изменяется.
Влияние времени между серединами соседних интервалов измерений на ошибку гироскопа при проведении автокомпенсации показано графически (фиг. 1). Для упрощения тренд сигнала угловой скорости от времени t принят линейным, K=0. Из рисунка видно, что при наличии тренда нулевого сигнала гироскопа погрешность автокомпенсации Δω увеличивается при увеличении времени между серединами интервалов измерений Δτ, которое в свою очередь зависит от времени одного измерения tизм и времени разворота на заданный угол tразв.
Расстояние между серединами соседних интервалов измерений равно:

С учетом (1) и (4) выражение (2) может быть представлено как

или 
С использованием выражений (5) может быть проведена оптимизация с целью уменьшения ошибки гироскопа при автокомпенсации Δω, а, следовательно, повышения точности определения азимута в зависимости от времени одного измерения tизм (или количества измерений n) при заданных времени гирокомпасирования tГК и времени разворота tразв на заданный угол.
Кроме этого процесс гирокомпасирования может быть оптимизирован по времени гирокомпасирования tГК. В последнем случае при заданных ошибке гироскопа при автокомпенсации Δω, времени разворота tразв на заданный угол, с использованием преобразованных выражений (5) оптимизируется время одного измерения tизм (или количество измерений n), чем достигается уменьшение времени определения азимута. В целом по выражениям (5) оптимизируется время и ошибка определения азимута по их минимуму.
Минимум выражений (5) (цель оптимизации по повышению точности) достигается при количестве измерений nопт или времени измерения tизм опт, при которых  либо
либо  , при условии перехода в окрестностях точек обнуления производных значений производных от отрицательных величин к положительным.
, при условии перехода в окрестностях точек обнуления производных значений производных от отрицательных величин к положительным.
В общем случае время разворота гироскопа в каждое положение может быть не одинаковым. Для определения суммарного времени измерения в этом случае определяют каждое время разворота гироскопа на заданный угол tразв i, где i - номер положения. Тогда время измерения во всех положениях будет равно  , где nK - количество кратных поворотов (при этом количество положений больше на 1). Для поиска оптимального алгоритма определения азимута в алгоритме выбирается tразвмин - минимальное время поворота на какой-то заданный угол, а все остальные повороты выбираются кратными минимальному углу поворота 2tразвмин, 3tразвмин и т.д. В этом случае оптимизируется влияние количества кратных поворотов оси чувствительности гироскопа на точность определения азимута.
, где nK - количество кратных поворотов (при этом количество положений больше на 1). Для поиска оптимального алгоритма определения азимута в алгоритме выбирается tразвмин - минимальное время поворота на какой-то заданный угол, а все остальные повороты выбираются кратными минимальному углу поворота 2tразвмин, 3tразвмин и т.д. В этом случае оптимизируется влияние количества кратных поворотов оси чувствительности гироскопа на точность определения азимута.
При определении азимута ψ ось чувствительности гироскопа разворачивают на количество углов, равное nопт, при котором с учетом суммарного времени всех поворотов гироскопа в каждое из положений (nопт-1)tразв обеспечивается минимальное время измерения (усреднения сигнала) в каждом положении, в соответствии с (1), равное  , а, следовательно, минимальное суммарное время определения азимута tГК, чем достигается заявляемый технический результат по повышению точности и сокращению времени определения азимута.
, а, следовательно, минимальное суммарное время определения азимута tГК, чем достигается заявляемый технический результат по повышению точности и сокращению времени определения азимута.
Конкретное осуществление заявляемого способа определения азимута проверено на примере оптимизации количества измерений и ошибки при определении азимута по простейшему 2-х-позиционному алгоритму автокомпенсации с дискретными поворотами на 180° с использованием волоконно-оптического гироскопа ОИУС-1000.
На рисунке (фиг. 2) представлены результаты построения вариаций Аллана ОИУС-1000 при тестировании в климатической камере в диапазоне температур от -30 до +60°C с получением температурных градиентов в катушке ВОГ. При температурном градиенте 20°C/час для тройки приборов по представленным вариациям Аллана получены следующие оценки параметров дрейфа:
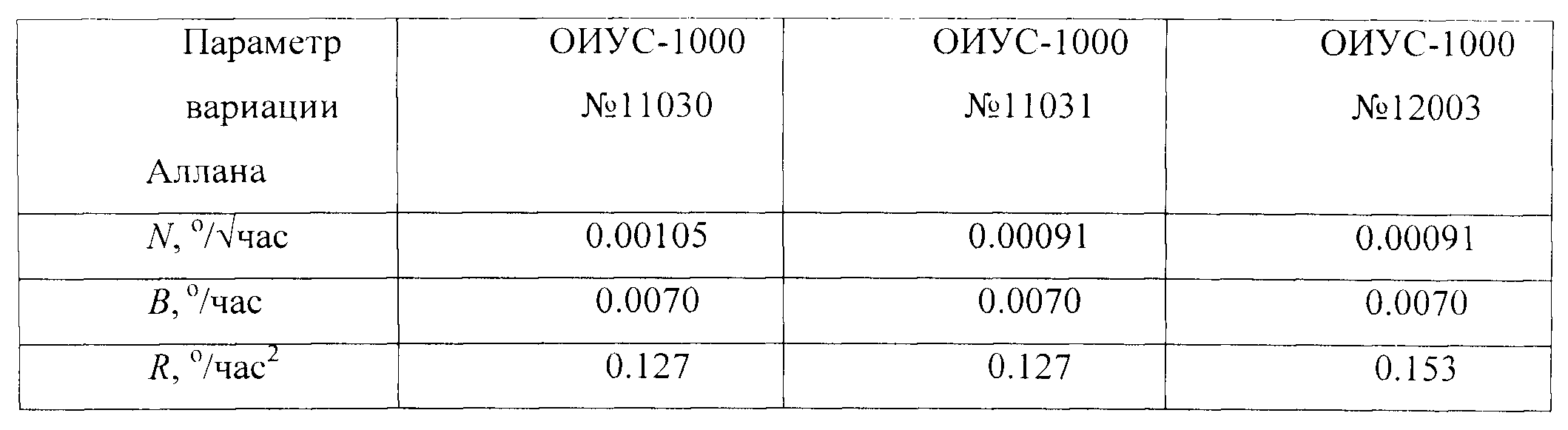
В целом, уровень случайного дрейфа и нестабильность смещения нуля приборов ОИУС-1000 одинаковы. При градиенте 20°C/час коэффициент тренда скорости дрейфа достигает 0.127÷0.153°/час2.
На рисунке (фиг. 3) представлен график зависимости  для полученных параметров вариации Аллана N=0.001°/√час и R=0.127°/час2 при параметрах определения азимута tразв=2 с и tГК=8 мин. Пересечение зависимости
для полученных параметров вариации Аллана N=0.001°/√час и R=0.127°/час2 при параметрах определения азимута tразв=2 с и tГК=8 мин. Пересечение зависимости  с осью абсцисс достигается при nопт=20. Автокомпенсация при определении азимута выполняется в 20-ти положениях с выполнением последовательных разворотов на 180°. При nопт=20 ошибка Δω измерения угловой скорости после применения автокомпенсации минимальна и составляет 0.0029°/час (1σ) (фиг. 4).
с осью абсцисс достигается при nопт=20. Автокомпенсация при определении азимута выполняется в 20-ти положениях с выполнением последовательных разворотов на 180°. При nопт=20 ошибка Δω измерения угловой скорости после применения автокомпенсации минимальна и составляет 0.0029°/час (1σ) (фиг. 4).
В результате, с учетом максимальной нестабильности смещения нуля, определенной по полученным данным (см. табл.) как  (1σ), в температурном диапазоне от -30 до +60°C на базе прибора ОИУС-1000 с применением предложенного способа возможно получение точности гирокомпасирования за время 8 мин, в соответствии с (3) (где Δω(τ,Δτ) равно суммарной ошибке
(1σ), в температурном диапазоне от -30 до +60°C на базе прибора ОИУС-1000 с применением предложенного способа возможно получение точности гирокомпасирования за время 8 мин, в соответствии с (3) (где Δω(τ,Δτ) равно суммарной ошибке  ), на уровне 0.06°·secφ (3σ). Время измерения в одном положении равно 22 с.
), на уровне 0.06°·secφ (3σ). Время измерения в одном положении равно 22 с.
При гирокомпасировании в 2-х положениях, что зачастую применяется на практике, ошибка в измерении азимута при тех же внешних условиях за время 8 мин составит 0.09°·secφ (3σ) (ошибка Δω измерения угловой скорости при n=2 равна 0.00667°/час (1σ) (фиг. 4)). Если сократить время измерения в одном положении до 22 с, что обеспечит необходимую компенсацию тренда, сохранив количество положений n=2, ошибка Δω измерения угловой скорости после применения автокомпенсации составит 0.0091°/час (1σ), а точность определения азимута будет равна 0,12°·secφ (3σ).
Таким образом, при применении предлагаемого способа за счет определения значений минимально необходимого времени измерения показаний в каждом положении оси чувствительности гироскопа и минимально необходимого количества измерений при заданном времени определения азимута реализуется процесс гирокомпасирования с применением автокомпенсации, оптимальный по времени и точности. При этом способ может быть применен к любому из известных методов автокомпенсации, использующих два, отличающихся на 180°, три или четыре, отличающихся на 90°, и более положений оси чувствительности гироскопа.
Способ определения азимута, включающий предварительную выставку оси чувствительности гироскопа и выполнение поворотов оси чувствительности гироскопа на заданные углы, определение показаний гироскопа на заданных углах и вычисление азимута с использованием полученных показаний, отличающийся тем, что измеряют время поворота гироскопа в каждое положение на заданный угол, определяют суммарное время измерения показаний гироскопа во всех положениях с учетом времени определения азимута, после чего определяют значения минимального необходимого времени измерения показаний в каждом положении оси чувствительности гироскопа и минимального необходимого количества измерений при заданном времени определения азимута.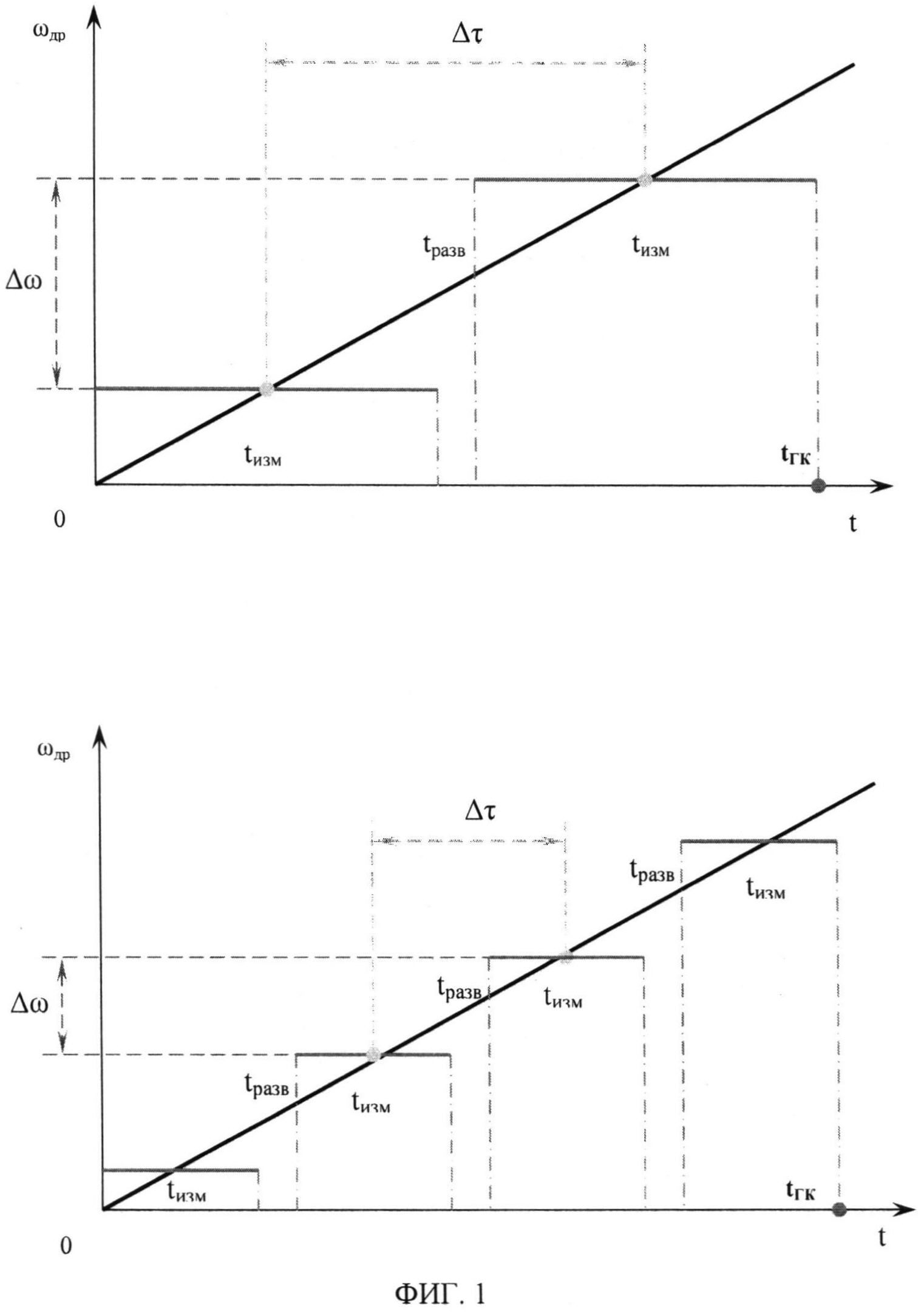
Гирогоризонткомпас
Электрогидравлический привод
Способ определения азимута
Гирогоризонткомпас
Однолучевой доплеровский датчик скорости для транспортных средств
Бесплатформенная аппаратура счисления координат
Устройство управления двигателем постоянного тока
Электрогидравлический привод
Гирогоризонткомпас
Гирогоризонткомпас
Гирогоризонткомпас
Электрогидравлический привод
Способ определения азимута
Гирогоризонткомпас
Однолучевой доплеровский датчик скорости для транспортных средств
Бесплатформенная аппаратура счисления координат
Устройство управления двигателем постоянного тока
Электрогидравлический привод
Гирогоризонткомпас
Гирогоризонткомпас

