Результат интеллектуальной деятельности: СПОСОБ ПАССИВНОЙ РАДИОЛОКАЦИИ
Вид РИД
Изобретение
Изобретение относится к радиотехнике и может быть использовано в многопозиционных системах пассивной радиолокации для определения местоположения и скорости движения радиоизлучающих объектов, прежде всего, непрерывных узкополосных радиоизлучений бортовых передатчиков радиосвязи и передачи данных.
Известен разностно-доплеровский способ пассивной радиолокации (Кондратьев B.C. и др. Многопозиционные радиотехнические системы / В.С. Кондратьев, А.Ф. Котов, Л.Н. Марков; Под ред. проф. В.В. Цветнова. - М.: Радио и связь, 1986, с. 252-253), включающий прием радиосигналов объекта в пространственно-разнесенных пунктах приема, ретрансляцию принятых периферийными пунктами радиосигналов на центральный пункт, измерение разности доплеровских частот и их производных для радиосигналов периферийных и центрального пунктов, определение по результатам измерений местоположения и вектора скорости движения объекта на плоскости путем решения системы четырех нелинейных уравнений.
Данному способу присущи следующие недостатки. Не обеспечивается моноимпульсная локация объекта (по результатам однократного приема), поскольку для определения производных необходимы измерения исходных разностей доплеровских частот в различающиеся моменты времени. Трудоемок процесс решения системы нелинейных уравнений.
Из известных способов наиболее близким к предлагаемому по технической сущности является разностно-дальномерный способ пассивной радиолокации (патент РФ №2285937, G01S 13/00; G01S 5/00, 2006), включающий прием радиосигналов объекта в пространственно-разнесенных пунктах приема и передачу их с периферийных на центральный пункт приема, где выполняют пространственно-временную обработку принятых радиосигналов и определяют координаты объекта с учетом времени распространения электромагнитных волн от него в пункты приема.
Условие «с учетом времени распространения электромагнитных волн» строго ограничивает класс пространственно-временной обработки, определяет ее существо и способы. Вместе с тем, в зависимости от критерия оптимальности, операции пространственно-временной обработки и определения координат могут выполняться различным образом. При основном требовании - максимум точности и помехозащищенности, целесообразен одноэтапный вариант способа-прототипа, состоящий в преобразовании принятых радиосигналов в пространственный спектр и определении положения его максимума в качестве оценки координат. При этом преобразование в пространственный спектр включает измерение и усреднение по совокупности пар пунктов приема (относительно центрального пункта) значений модуля взаимных корреляционных функций принятых радиосигналов с компенсацией расчетного запаздывания моментов прихода электромагнитных волн в пункты приема из мест возможного положения источника. Если, в первую очередь, необходима скорость обработки, предпочтительнее двухэтапная процедура (Кондратьев B.C. и др. Многопозиционные радиотехнические системы / В.С. Кондратьев, А.Ф. Котов, Л.Н. Марков; Под ред. проф. В.В. Цветнова. - М.: Радио и связь, 1986, с. 228-234), в соотвествии с которой измеряют задержки между принятыми радиосигналами, после чего прямым вычислением, для числа пунктов приема не более четырех и известной высоты подъема объекта, определяют его координаты.
Способу-прототипу присущи следующие недостатки. Область применения ограничена условием неподвижности объекта, соответственно скорость его движения не измеряется. При движении вследствие доплеровского сдвига частоты пространственно-когерентные связи электромагнитного поля в пунктах приема разрушаются. Неучет этого приводит к погрешностям определения координат, которые особенно велики при локации непрерывных узкополосных радиоизлучений бортовых передатчиков радиосвязи и передачи данных с нестационарными сигналами.
Технической задачей данного изобретения является обеспечение измерения скорости движения объекта при одновременном увеличении точности определения координат в моноимпульсном режиме.
Поставленная задача решается за счет того, что в известном способе пассивной радиолокации, включающем прием радиосигналов объекта в пространственно-разнесенных пунктах приема и передачу их с периферийных на центральный пункт приема, где выполняют пространственно-временную обработку радиосигналов и определяют координаты объекта с учетом времени распространения электромагнитных волн от него в пункты приема, новым является то, что на центральном пункте приема дополнительно измеряют и компенсируют разности доплеровских частот радиосигналов периферийных и центрального пункта приема и выполняют пространственно-временную обработку преобразованных радиосигналов, а по измеренным разностям частот и ранее определенным координатам объекта вычисляют вектор его скорости.
Решение поставленной технической задачи основывается на учете в принимаемых радиосигналах одновременно как запаздывания (способ-прототип), так и частотного доплеровского сдвига (способ-аналог) во взаимосвязи их с местоположением и вектором скорости движения объекта. Такое комплексирование снимает проблему обеспечения моноимпульсного режима локации способа-аналога и позволяет определять местоположение объекта разностно-дальномерным способом, но после компенсации доплеровских сдвигов. Компенсацией устраняются погрешности локации подвижного объекта способа-прототипа. Для определения вектора скорости результаты измерения разности доплеровских частот используют вторично, привлекая для этого полученные координаты объекта. При этом вектор скорости оказалось возможным определять аналитически, по приведенным ниже формулам, не прибегая к решению систем нелинейных уравнений способа-аналога.
Таким образом, совместный учет запаздывания и частотного доплеровского сдвига принимаемых радиосигналов в соответствии с предложенными новыми действиями, условиями и порядком их выполнения позволяет решить поставленную техническую задачу: обеспечения измерения скорости движения при одновременном увеличении точности определения координат объекта в моноимпульсном режиме.
Указанные преимущества, а также особенности настоящего изобретения поясняются вариантом его выполнения со ссылками на прилагаемые фигуры.
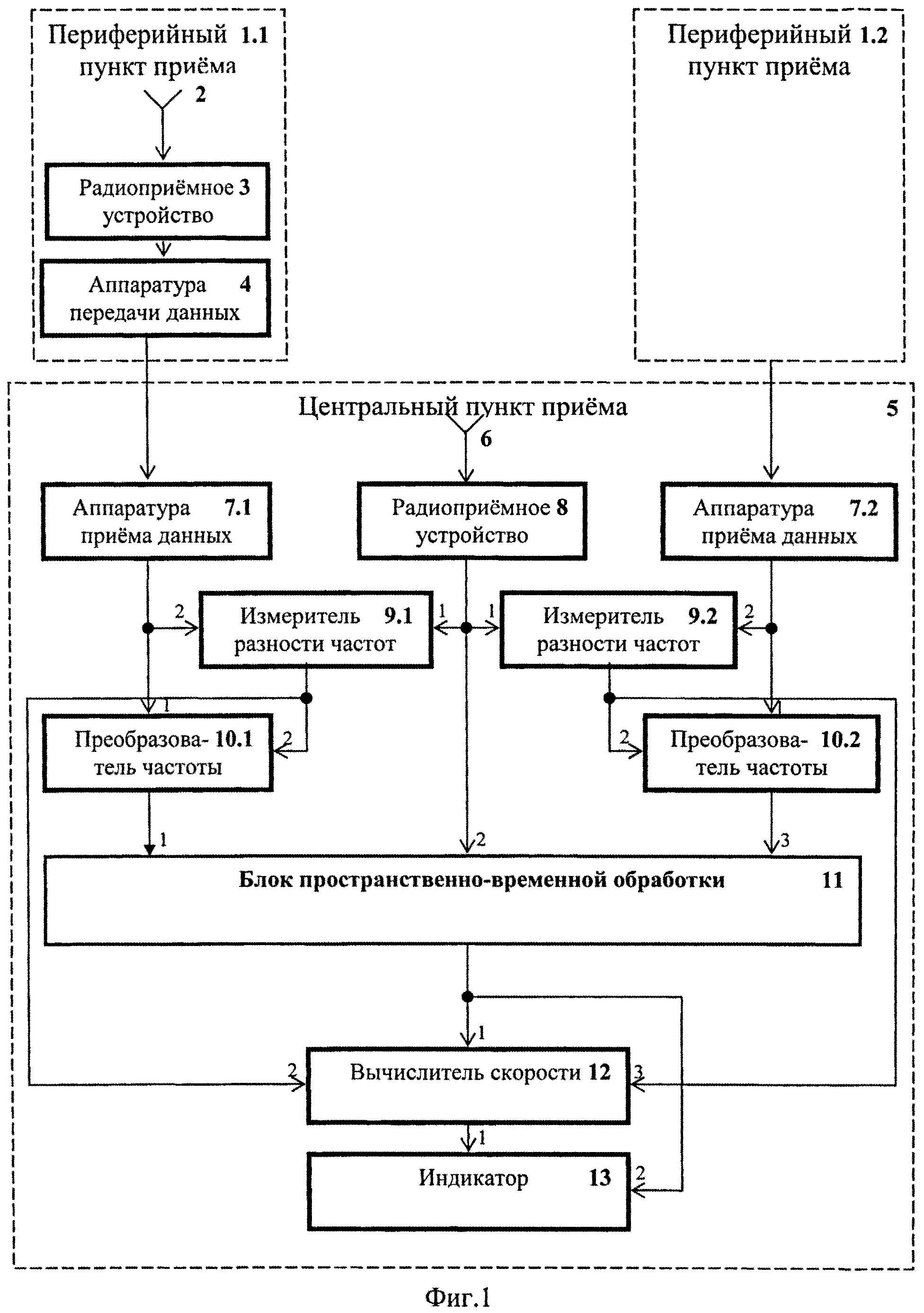
На фиг. 1 представлена структурная схема системы пассивной радиолокации для реализации заявленного способа;
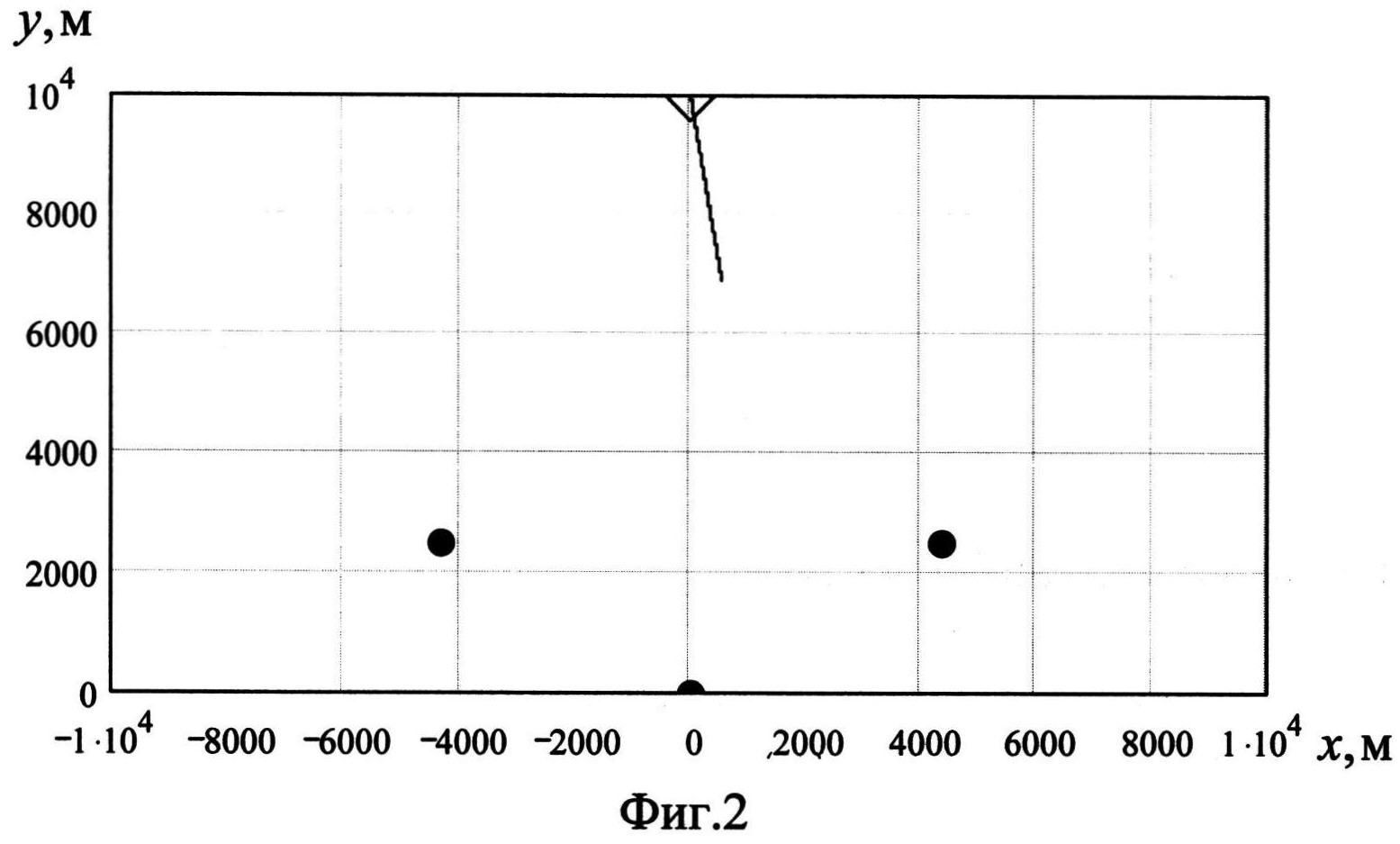
на фиг. 2 показано положение пунктов приема и объекта на плоскости в декартовой системе координат;
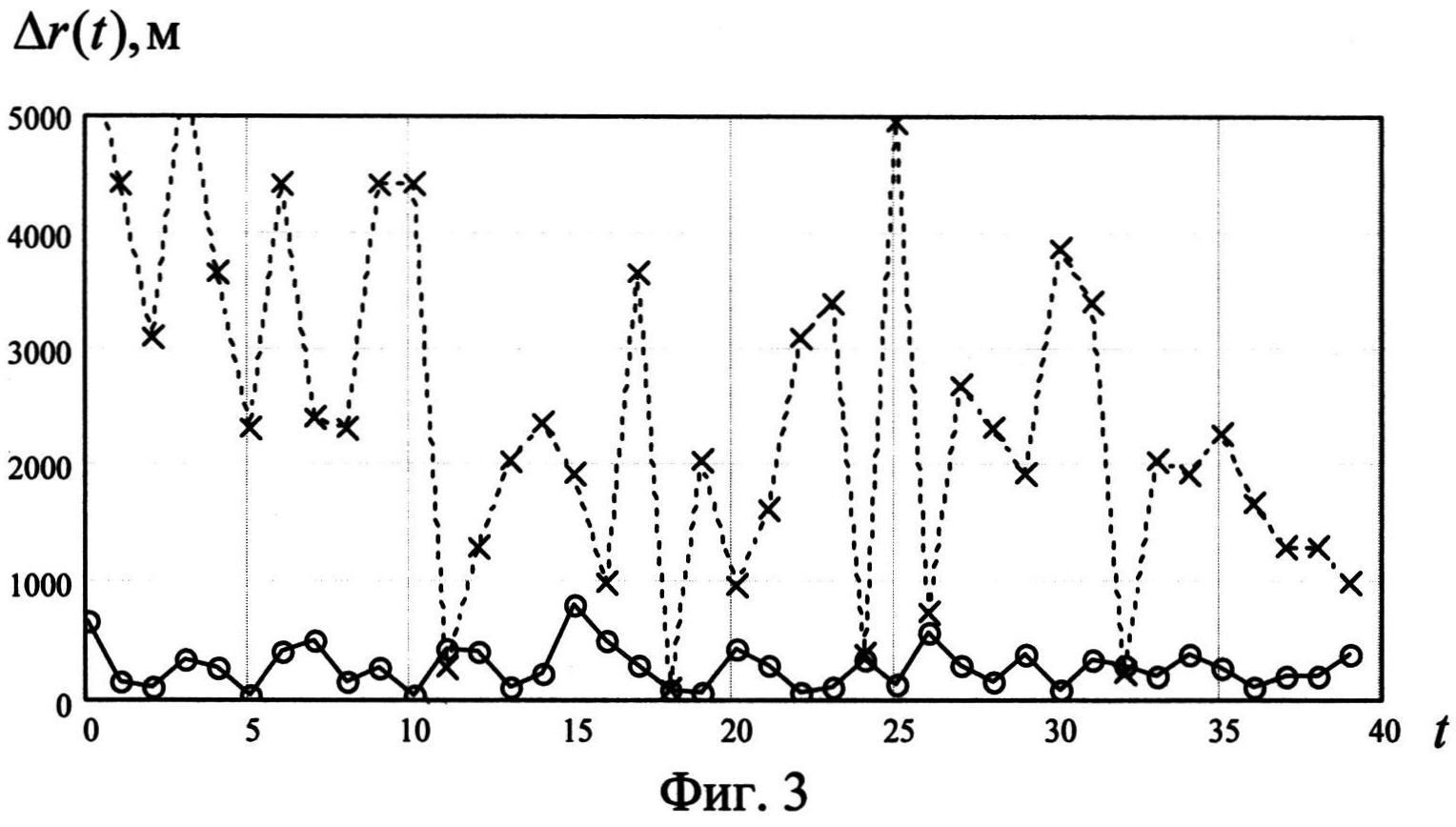
на фиг. 3 - график изменения линейной ошибки определения координат в статистических экспериментах;
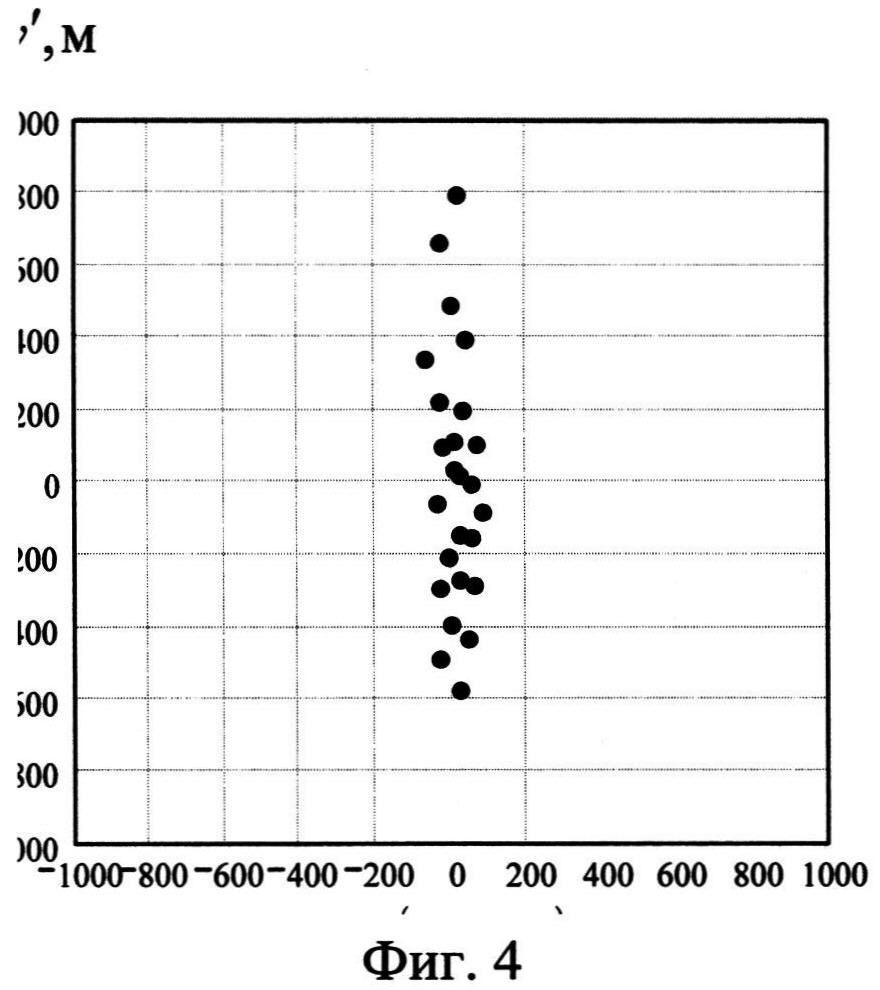
фиг. 4 - поле рассеяния оценок координат;
фиг. 5 - поле рассеяния оценок скорости.
Система пассивной радиолокации (фиг. 1), реализующая предложенный способ, содержит периферийные пункты приема 1.1, 1.2, каждый из которых включает антенну 2, радиоприемное устройство 3, аппаратуру передачи данных 4, выход которой является и выходом соответствующего периферийного пункта, и центральный пункт приема 5, содержащий антенну 6, аппаратуру приема данных 7.1, 7.2, радиоприемное устройство 8, выходом подключенное к первым входам измерителей разности частот 9.1, 9.2, выходы которых соединены со вторыми входами преобразователей частоты соответственно 10.1 и 10.2, к первым входам которых подключены выходы аппаратуры приема данных соответственно 7.1, 7.2, блок пространственно-временной обработки 11, первым, третьим и вторым входом соединенный соответственно с выходом преобразователей частоты 10.1, 10.2 и радиоприемного устройства 8, вычислитель скорости 12, первым, вторым и третьим входами подключенный к выходам соответственно блока пространственно-временной обработки 11 и измерителей разности частот 9.1, 9.2, и индикатор 13, первым и вторым входом соединенный с выходом вычислителя скорости 12 и блока пространственно-временной обработки 11. Выходы периферийных пунктов 1.1, 1.2 соединены с входами аппаратуры приема данных соответственно 7.1, 7.2, а антенна 6 подключена к входу радиоприемного устройства 8.
Система с тремя пунктами приема (включая центральный пункт) является минимально достаточной при локации объекта с известной высотой подъема. В случае трех неизвестных координат объекта минимальное число пунктов приема должно быть увеличено до четырех.
Антенны 2, 6 пунктов приема всенаправленные или с ориентацией их диаграмм направленности в рабочую зону, когда она ограничена некоторой областью пространства.
Разности доплеровских частот радиосигналов, принятых периферийными пунктами приема 1.1, 1.2, оценивают в измерителях 9.1, 9.2 относительно радиосигнала центрального пункта приема с выхода радиоприемного устройства 8. При этом могут быть использованы известные способы или вариант, принятый далее при моделировании, когда определяют инвариантные к запаздыванию спектры мощности радиосигналов периферийного и центрального пунктов приема, а затем взаимную корреляционную функцию спектров мощности, по положению максимума которой оценивают искомую разность частот. (Принцип аналогичен используемому при измерении задержки между сигналами, но перенесенный в частотную (спектральную) область). В преобразователях частоты 10.1, 10.2 путем соответствующего сдвига частоты измеренные разности частот компенсируют. В блоке пространственно-временной обработки 11 реализуют одноэтапный вариант обработки способа-прототипа, но применительно к радиосигналам преобразованным, после компенсации разности частот.
Локация подвижного объекта в соответствии с заявляемым способом происходит следующим образом. Радиосигналы объекта принимают в пространственно-разнесенных периферийных 1.1, 1.2 пунктах приема и центральном пункте приема 5 с помощью антенн 2, 6 и радиоприемных устройств 3, 8. Принятые периферийными пунктами 1.1, 1.2 радиосигналы передают на центральный пункт 6 с помощью аппаратуры передачи 4 и приема данных 7.1, 7.2.
При нумерации пунктов приема в последующих формулах используем следующие обозначения: n=1,…, N-1 - номер периферийного пункта приема, n=0 - номер центрального пункта приема, N - общее число пунктов приема. Введем также в рассмотрение декартову систему координат с центром в месте размещения центрального пункта приема, в которой:  - комплексные координаты точки в горизонтальной плоскости касательной поверхности Земли, x - абсцисса, y - ордината, h - высота, i - мнимая единица.
- комплексные координаты точки в горизонтальной плоскости касательной поверхности Земли, x - абсцисса, y - ордината, h - высота, i - мнимая единица.
Излучение радиоволн с движущегося объекта сопровождается возникновением в принимаемых радиосигналах запаздывания и частотного доплеровского сдвига


где  - комплексные координаты объекта в горизонтальной плоскости,
- комплексные координаты объекта в горизонтальной плоскости,  - дальность до объекта от n-го пункта приема, h0 - высота подъема объекта,
- дальность до объекта от n-го пункта приема, h0 - высота подъема объекта,  - координаты пункта приема,
- координаты пункта приема,  - вектор скорости объекта, модуль которого есть линейная скорость, а фаза (курс движения) отсчитывается от оси ординат по часовой стрелке, звездочка вверху справа от величины - операция комплексного сопряжения, Re(·) - реальная часть величины, заключенной в скобки, λ - длина волны излучения.
- вектор скорости объекта, модуль которого есть линейная скорость, а фаза (курс движения) отсчитывается от оси ординат по часовой стрелке, звездочка вверху справа от величины - операция комплексного сопряжения, Re(·) - реальная часть величины, заключенной в скобки, λ - длина волны излучения.
В соответствии с формулами запаздывание (1) определяется координатами объекта, а частотный сдвиг (2) дополнительно зависит от скорости.
В измерителях разности частот 9.1, 9.2 измеряют, а в преобразователях частоты 10.1, 10.2 компенсируют разности частот радиосигналов периферийных и центрального пункта приема. После этого, с учетом запаздывания (1), в блоке пространственно-временной обработки 11 определяют координаты объекта разностно-дальномерным способом.
По результатам определения координат объекта и измерений разностей ΔFn доплеровских частот радиосигнала n-го периферийного пункта приема относительно центрального пункта в вычислителе скорости 12 рассчитывают скорость объекта по формуле

где



Re(·), Im(·) - реальная и мнимая части величины, заключенной в скобки.
Расчетная формула (3) получена на основе исходного соотношения (2) методом максимального правдоподобия с учетом коэффициента корреляции 0,5 вследствие измерений разностей доплеровских частот с общим вычитаемым (относительно общего центрального пункта приема). Эта формула не единственная пригодная для расчета, определяется критерием оптимальности, в частности, по методу наименьших квадратов весовые коэффициенты dn,n'=0 при n≠n' и следуют упрощения со снижением вычислительных затрат, но некоторым увеличением разбросов оценок скорости вследствие неучета корреляции.
Измеренные параметры объекта (местоположение, скорость движения) отражают на индикаторе 13.
Эффективность изобретения выражается в обеспечении измерения скорости движения объекта при одновременном увеличении точности определения координат в моноимпульсном режиме. Количественная оценка выполнена методом имитационного моделирования для следующих условий.
Исследовалась система пассивной радиолокации с пунктами приема, показанными на плоскости (x, y) фиг. 2 жирными точками. Удаление периферийных пунктов приема составляет 5 км. Треугольником в верхней части рисунка указано положение объекта, линия от треугольника - направление движения. Расстояние объекта от центрального пункта 10 км, высота 1000 м полагалась известной, скорость движения 200 м/с, курс 170 градусов. Имитировалось излучение связного передатчика на длине волны 0,3 м. Излучаемый сигнал узкополосный, частотно-модулированный суммой двух синусоидальных колебаний с иррациональным соотношением частот 1 и 1/π к килогерц для придания нестационарности. Девиация частоты первого колебания 12,5 КГц, второго - втрое меньше. Начальные фазы радиосигналов и модулирующих колебаний случайны в экспериментах. Длительность реализации принимаемых радиосигналов 2,56 мс. К радиосигналам, принимаемым в полосе частот приема 50 КГц, примешивался аддитивный гауссовский шум постоянной интенсивности из расчета обеспечения отношения сигнал/шум (амплитуды сигнала к среднему квадратическому значению шума) равным 20.
На фиг. 3 показаны значения линейной ошибки Δr(t) определения координат предлагаемым способом (сплошная линия с кружками) и способом-прототипом (пунктир с крестиками) в последовательности статистически независимых экспериментов с номерами t=0, 1, … , 40. Линейная ошибка определяется как модуль разности измеренных и истинных комплексных координат объекта. Видно существенное, примерно на порядок, снижение погрешности измерений с применением предлагаемого способа. Численно оно выражается следующими значениями для средней квадратичной погрешности (корень квадратный из среднего квадратов линейных ошибок) с 2847 м до 327 м. Рассеяние оценок координат предлагаемым способом показано на фиг. 4, где точками отмечены результаты определения местоположения объекта в экспериментах. Здесь центр системы координат (x', y') совмещен с истинным положением объекта. Согласно рисунку рассеяние оценок координат типичное для разностно-дальномерного способа в отсутствие движения объекта. Погрешности измерения скорости движения характеризуются полем рассеяния оценок скорости фиг. 5, представленных в координатах реальной и мнимой частей разности измеренных и истинных скоростей, соответственно по оси ординат Vy и оси абсцисс Vx. Среднее квадратическое отклонение оценок модуля скорости составило 15,2 м/с, курса 0,5 градуса, при этом в силу вытянутости области рассеяния по линии движения итоговая средняя квадратичная погрешность определения скорости составила 15,5 м/с.
Моделирующая программа разработана в системе Mathcad, имеется у авторов и патентообладателя.
Таким образом, предложенное техническое решение обеспечивает измерение скорости движения при одновременном увеличении точности определения координат объекта в моноимпульсном режиме.
Способ пассивной радиолокации, включающий прием радиосигналов объекта в пространственно-разнесенных пунктах приема и передачу их с периферийных на центральный пункт приема, где выполняют пространственно-временную обработку радиосигналов и определяют координаты объекта с учетом времени распространения электромагнитных волн от него в пункты приема, отличающийся тем, что на центральном пункте приема дополнительно измеряют и компенсируют разности доплеровских частот радиосигналов периферийных и центрального пункта приема и выполняют пространственно-временную обработку преобразованных радиосигналов, а по измеренным разностям частот и ранее определенным координатам объекта вычисляют вектор его скорости.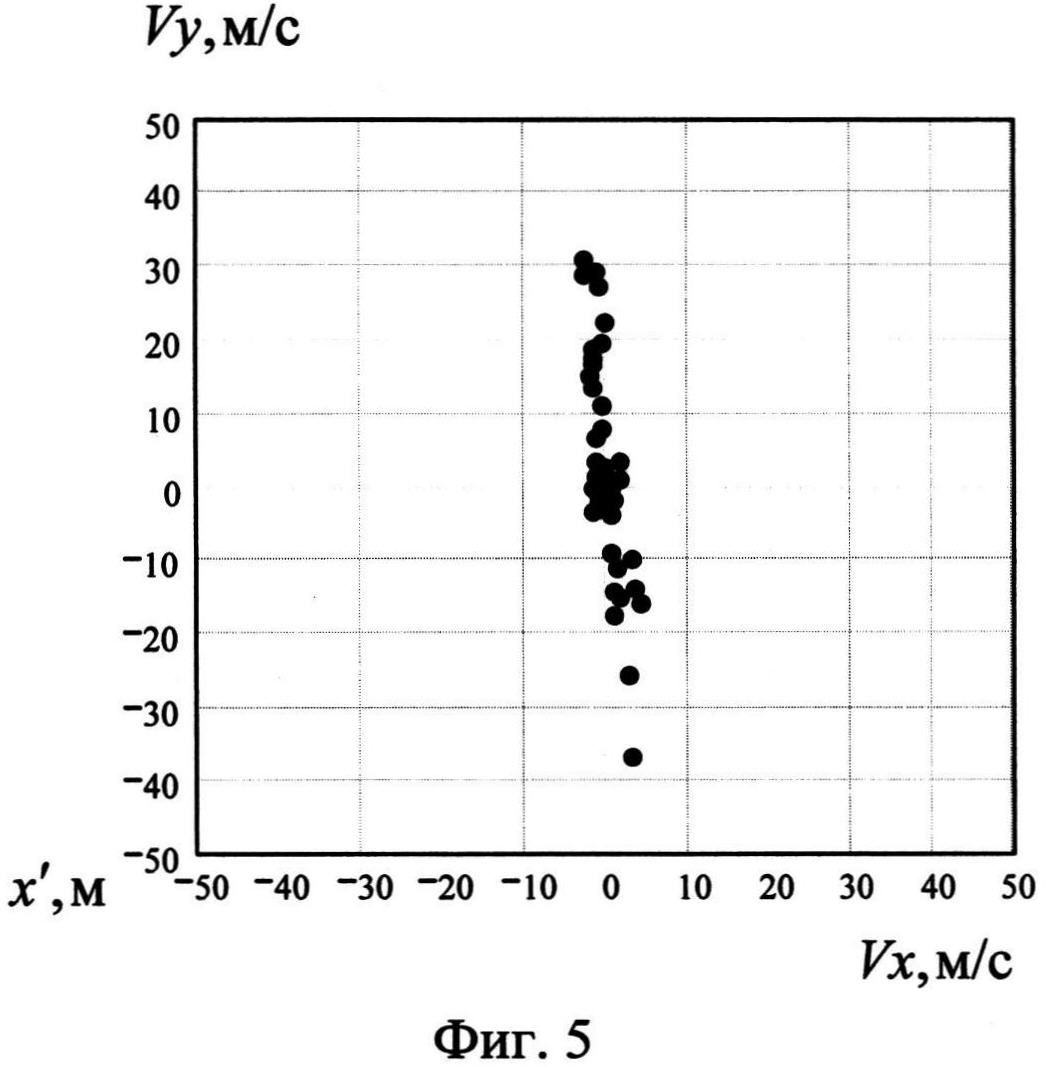
Способ и устройство синхронизации и устранения фазовой неоднозначности сигналов систем связи с временным разделением каналов
Устройство отделения и раскрытия створок батареи солнечной космического аппарата
Способ нанесения теплозащитного покрытия на корпус ракетного двигателя твердого топлива
Способ определения углового положения источника ofdm сигналов
Способ измерения дальности и радиальной скорости в рлс с зондирующим составным псевдослучайным лчм импульсом
Система коррекции шкал времени группы удаленных часов
Узел соединения модулей летательного аппарата
Гидропривод ракетного комплекса с системой удаления воздуха, растворенного в рабочей жидкости
Механизм взведения подвижных частей автоматической пушки
Устройство для приема информации по двум параллельным каналам связи в системе передачи данных с решающей обратной связью
Способ самонаведения на наземную цель
Способ радиосвязи с пространственным разделением каналов

