Результат интеллектуальной деятельности: СПОСОБ РАДИОЛОКАЦИИ НА МАЛЫХ ДАЛЬНОСТЯХ
Вид РИД
Изобретение
Изобретение относится к способам локации на малых дальностях (до нескольких километров) в радиосистемах посадки летательных аппаратов (ЛА), сближения и стыковки космических объектов, безопасного вождения и парковки автомобилей, мониторинга местности и пр. при решении задач обнаружения и распознавания объектов, особенно малоразмерных с малой эффективной площадью рассеивания (ЭПР), при определении их местоположения, построении радиолокационного изображения (РЛИ) местности с заданным разрешением, навигации в плохих погодных условиях и т.д.
В локаторе длительность зондирующего сигнала, как правило, определяется энергетическими соображениями, и, зачастую, особенно при использовании твердотельных генераторов и усилителей мощности, требуемая минимальная длительность зондирующего сигнала значительно превышает задержку эхо-сигнала на минимальной дальности работы локатора. При этом вследствие неидеальности развязки приемо-передающих трактов, при лоцировании объектов на малых дальностях в приемном тракте на принимаемый эхо-сигнал накладывается «пролезающий» зондирующий сигнал и возникает задача приема эхо-сигналов, отраженных от лоцируемых объектов, на фоне этого паразитного мешающего сигнала.
Амплитуда эхо-сигнала уменьшается обратно пропорционально 4-й степени увеличения дальности, а уровень мешающих сигналов («пролезающего» от зондирующего сигнала и собственных шумов приемного тракта) постоянен. При этом могут возникнуть три варианта приема. Первый случай соответствует приему эхо-сигналов на малых «нулевых» дальностях, когда эхо-сигнал значительно превышает паразитный сигнал от зондирующего сигнала. В этом случае можно использовать обычный зондирующий сигнал, например в виде одиночного импульса.
По мере увеличения дальности особенно при лоцировании малоразмерных объектов мощность эхо-сигналов становится соизмеримой или даже меньше мощности «пролезающей» помехи от зондирующего сигнала. На этом втором участке работа локатора невозможна без увеличения развязки приемо-передающих каналов. Наконец, третий участок соответствует дальности, когда задержка эхо-сигналов превосходит длительность зондирующего сигнала, и лоцирование осуществляется на фоне собственных шумов приемного тракта (и внешних помех, в общем случае).
Второй участок требует принятия специальных мер по развязке принятых эхо-сигналов от излучаемого. Но при использовании пространственных, частотных и поляризационных методов развязку более 50…70 дБ технически реализовать трудно. Полностью устранить эту проблему можно за счет разнесения по времени излучения зондирующего сигнала и приема отраженных от лоцируемых объектов сигналов, т.е. когда в любой момент времени система либо излучает сигнал, либо его принимает. В этом случае для решения проблемы можно использовать прерывистый сигнал (статья G. Brooker, D. Birch, J. Solms «W-Band Airborne Interrupted frequency Modulated CW Imaging Radar», журнал «Aerospace and Electronic Systems», vol. 41, no. 3, июль 2005).
Прерывистый сигнал на каждом такте зондирования имеет вид последовательности подымпульсов и характеризуется длительностью подымпульсов, их периодом повторения, их количеством и модуляцией сигналов в подымпульсах.
Похожие сигналы используют в ультразвуковой дефектоскопии (см., например, В.Г. Карташев, И.В. Соколов «Сплит-сигнал, его характеристики и методы обработки», журнал «Радиотехника», 2009, №1).
В указанной статье решают задачи согласованной фильтрации зондирующего сигнала в виде набора импульсов (квазигармоник, если использовать терминологию Карташева) с индивидуальной постоянной частотой заполнения и заданной огибающей (прямоугольной, гауссовской). В статье, в частности, показано, что если в импульсе укладывается не целое число длин волн частоты заполнения, то автокорреляционная функция (АКФ) такого сигнала дает побочные максимумы при t=К×Тп, где К=1, 2, 3…, а Тп - период повторения импульсов, т.е. в общем случае возникает неопределенность в местоположении лоцируемого объекта, а также возможны взаимные помехи эхо-сигналов от объектов, смещенных по дальности на величину сКТп/2, где с - скорость света.
Вместе с тем, так как в этой статье главной задачей является уменьшение объема вычислительных операций, то основное внимание в ней уделяется непрерывному сигналу и практически не обсуждаются методы подавления побочных максимумов для прерывистого сигнала. Тем не менее рассмотренный вариант применения прерывистого сигнала является наиболее близким аналогом-прототипом способа, предлагаемого для решения задач в условиях малой дальности локации.
Задачей предлагаемого изобретения является разработка способа локации объекта на малых дальностях с использованием прерывистого сигнала при подавлении побочных лепестков его АКФ до требуемого уровня. При этом для зондирования выбирают прерывистый импульсный сигнал, соответствующий стробированию (вырезанию) из прямоугольного импульса с линейной частотной модуляцией (ЛЧМ) и с девиацией частоты fдев N подымпульсов длительностью τи каждый и с периодом повторения Тп, так что длительность всей пачки подымпульсов τс=N×Тп. Причем суммарная длительность всех подымпульсов τиΣ=N×τи должна быть не менее τс_min_с/ш - минимально допустимой длительности зондирующего сигнала, определяемой требуемой энергией зондирующего сигнала (энергетическим потенциалом локатора). Девиацию частоты fдев определяют исходя из требований по разрешающей способности лоцирования по дальности, а при приеме проводят согласованную с зондирующим сигналом обработку, а также весовую обработку для уменьшения боковых лепестков по дальности. Применение прерывистого сигнала и подавление побочных лепестков его АКФ обеспечивают, с одной стороны, полную развязку принимаемых эхо-сигналов от «пролезающего» в приемный тракт локатора зондирующего сигнала, а, с другой, однозначность лоцирования объектов на заданном интервале дальностей и подавление помех от объектов, расположенных далее этого интервала, до требуемого уровня.
Сущность изобретения состоит в том, что в способе радиолокации на малых дальностях, при котором при зондировании используют прерывистый импульсный сигнал, выбор параметров прерывистого сигнала осуществляют исходя из требуемого значения подавления «дифракционных» лепестков (ДЛ) автокорреляционной функции (АКФ) этого сигнала, вызванных переходом от одиночного ЛЧМ импульса к пачке из N подымпульсов, для чего определяют требуемое число Ктр первых подавляемых ДЛ и осуществляют их подавление за счет размещения их в «нулевых» зонах АКФ путем выбора периода повторения этих лепестков, определяемого выражением ТДЛ=N/fдев, и длительностей τи и τmax, где τи - длительность подымпульса, τmax≥2Rmax/c, Rmax - максимальная дальность лоцирования, а с - скорость света, причем для k-го подавляемого ДЛ в диапазоне 1≤k≤Ктр выполняется неравенство ((k-1)τmax+kτи)<kТДЛ<(kτmax+(k-1)τи).
При этом число подавляемых ДЛ Ктр определяется выражением:
где Lпод - требуемое значение подавления ДЛ в дБ, а Е[х] - целая часть от х.
Кроме того, при выборе параметров зондирующего сигнала сначала вычисляют требуемое количество подымпульсов N при τmax=2Rmax/c в соответствии с выражением:
N=Е[τmax×fдев],
а затем находят длительность подымпульса как τи =(τc_min_c/ш)/N и количество подавляемых ДЛ, соответствующее этому τи:
и, если Ктр ≤ Кпод, то полученное Ктр используют для вычисления τи

причем при невыполнении условия Ктр ≥ Кпод увеличивают Rmax или уменьшают τс_min_с/ш до выполнения этого условия.
Кроме того, для учета протяженности ДЛ и его расширения при весовой обработке для найденных параметров сигнала вычисляют корректировочные поправки
 и
и  ,
,
а итоговые параметры сигнала получают из выражений
 ,
,
 .
.
Технический результат применения предлагаемого способа заключается в обеспечении возможности лоцирования объектов на малой дальности при недостаточном для радиолокации соотношении мощностей эхо-сигнала и мешающего «пролезающего» в приемный тракт зондирующего сигнала. Это достигается за счет использования для локации на малых дальностях прерывистого ЛЧМ сигнала, обработка и выбор параметров которого осуществляются в соответствии с предлагаемым способом.
Перечень фигур:
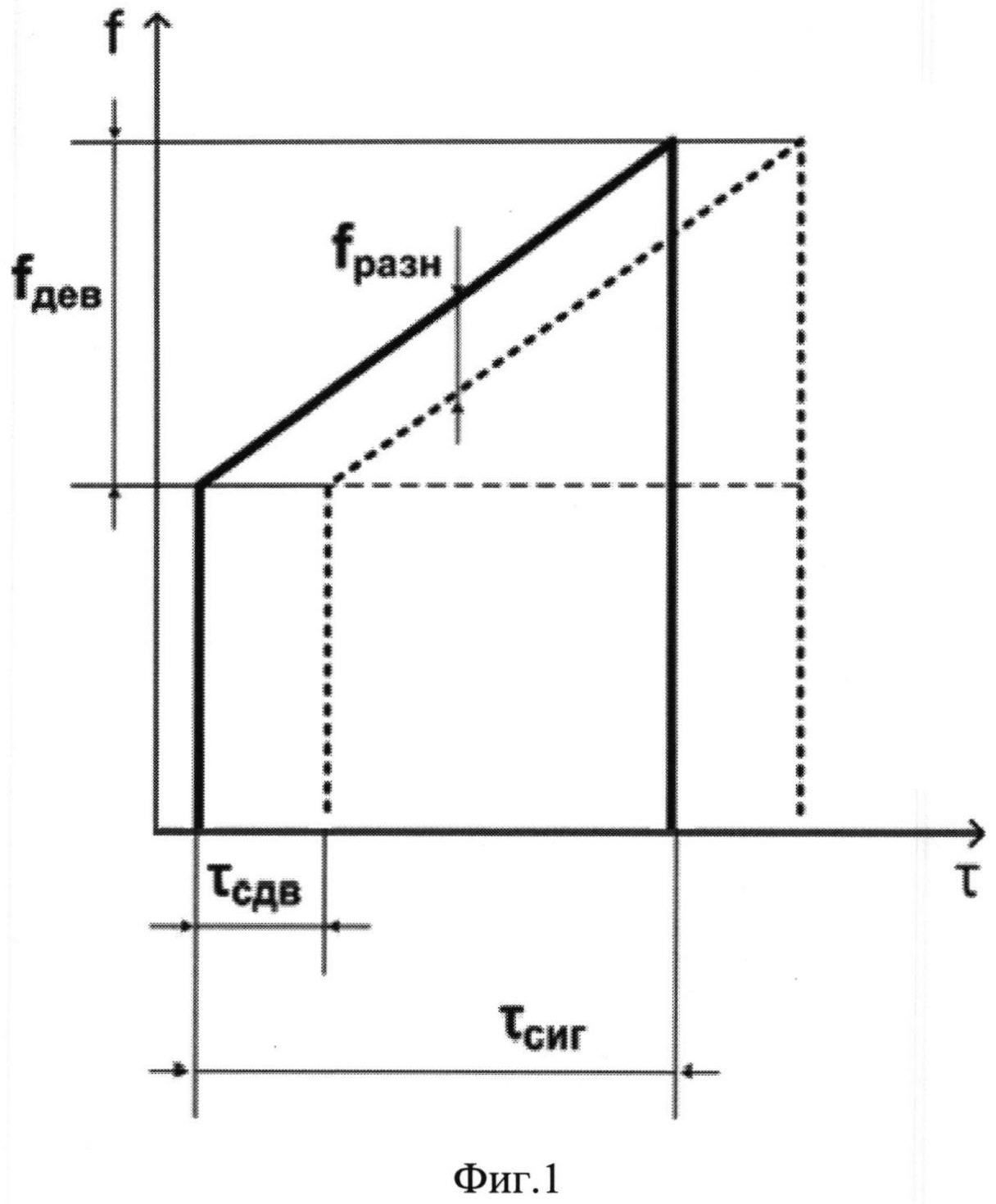
На фиг. 1 изображены два сдвинутых относительно друг друга ЛЧМ сигнала, что иллюстрирует физический смысл разностной частоты (fразн) и ее зависимость от временного сдвига.
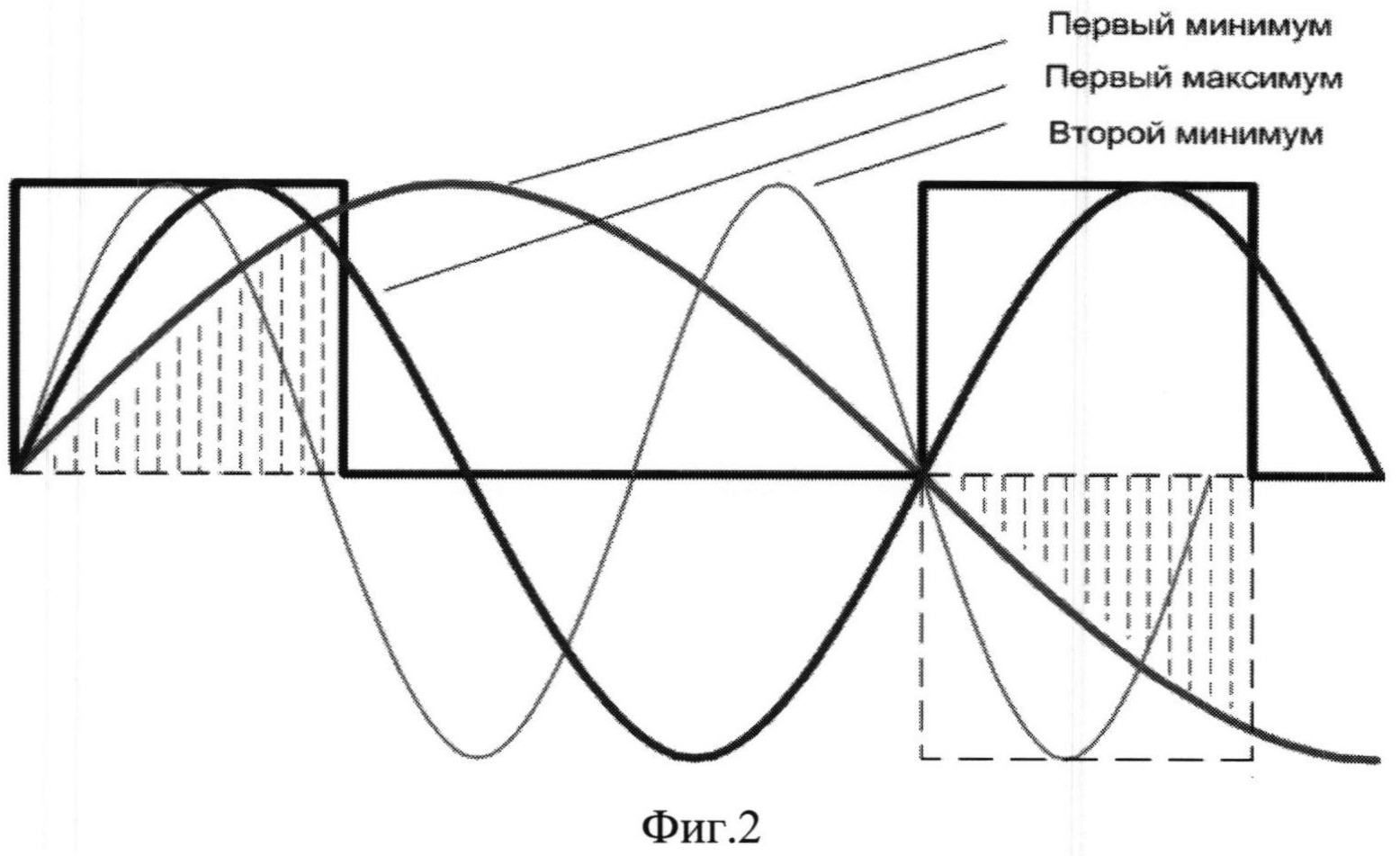
На фиг. 2 приведены два подымпульса прерывистого сигнала и сигнал разностной частоты. Показана причина возникновения дифракционных лепестков при когерентном суммировании - укладывание кратного количества длин волны разностной частоты в период повторения подымпульсов.
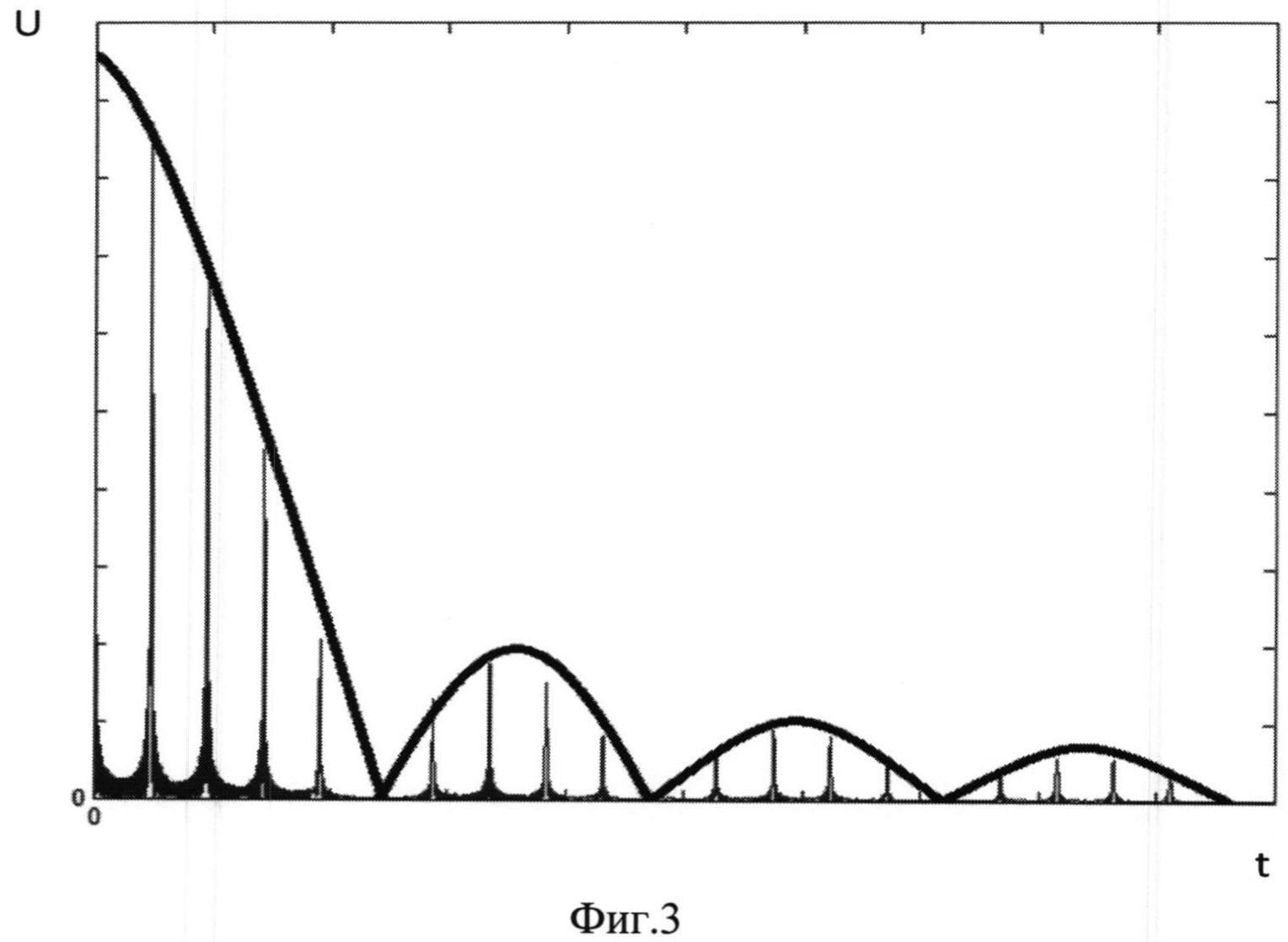
На фиг. 3 показан общий вид взаимокорреляционной функции, полученной при свертке прерывистого ЛЧМ сигнала с соответствующим непрерывным сигналом той же длительности. Здесь видны все возникающие дифракционные лепестки.
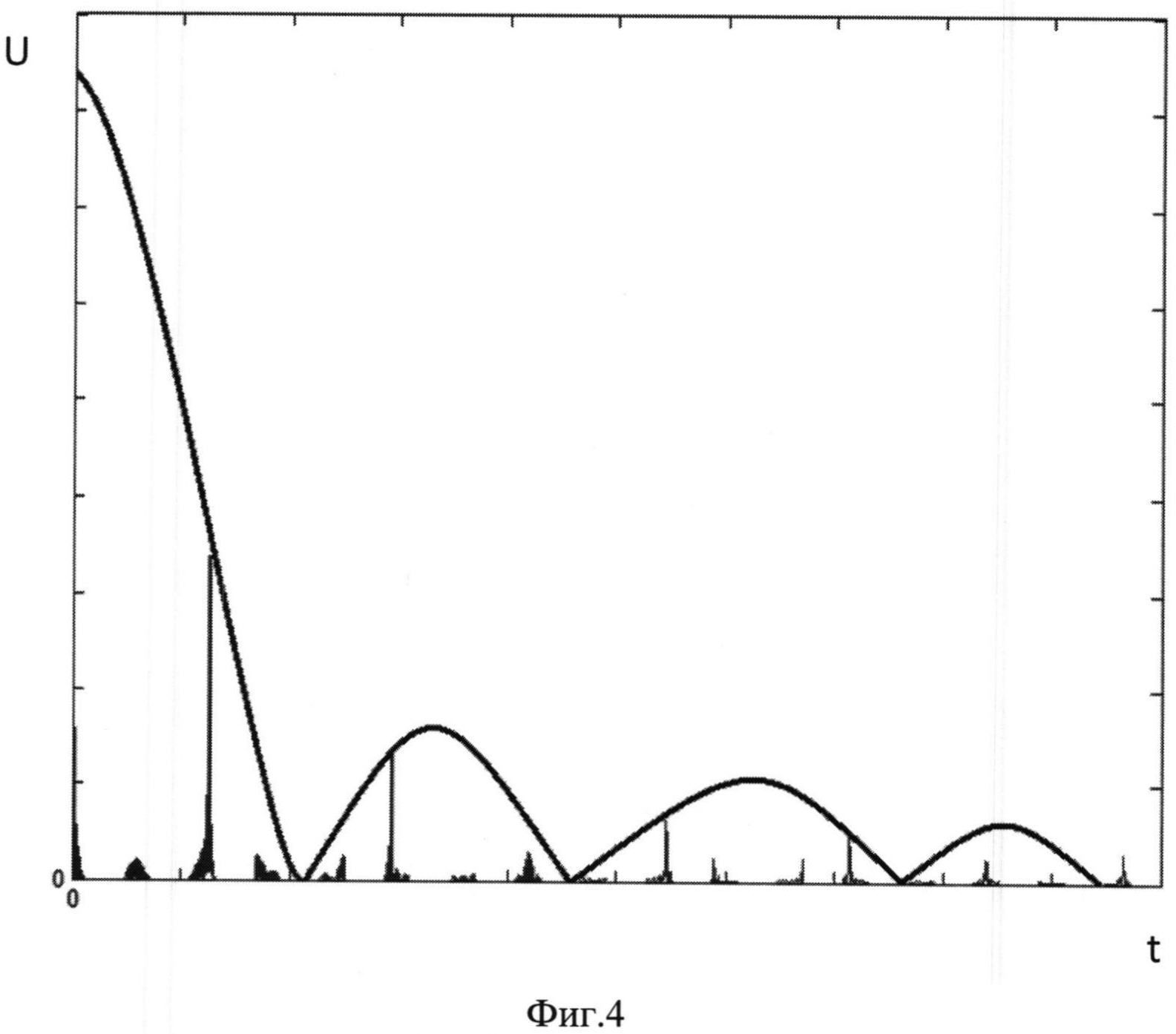
На фиг. 4 приведен общий вид автокорреляционной функции, полученной при свертке прерывистого ЛЧМ сигнала с точно таким же сигналом. Видны «нулевые зоны» и подавление некоторых дифракционных лепестков за счет попадания в эти зоны.
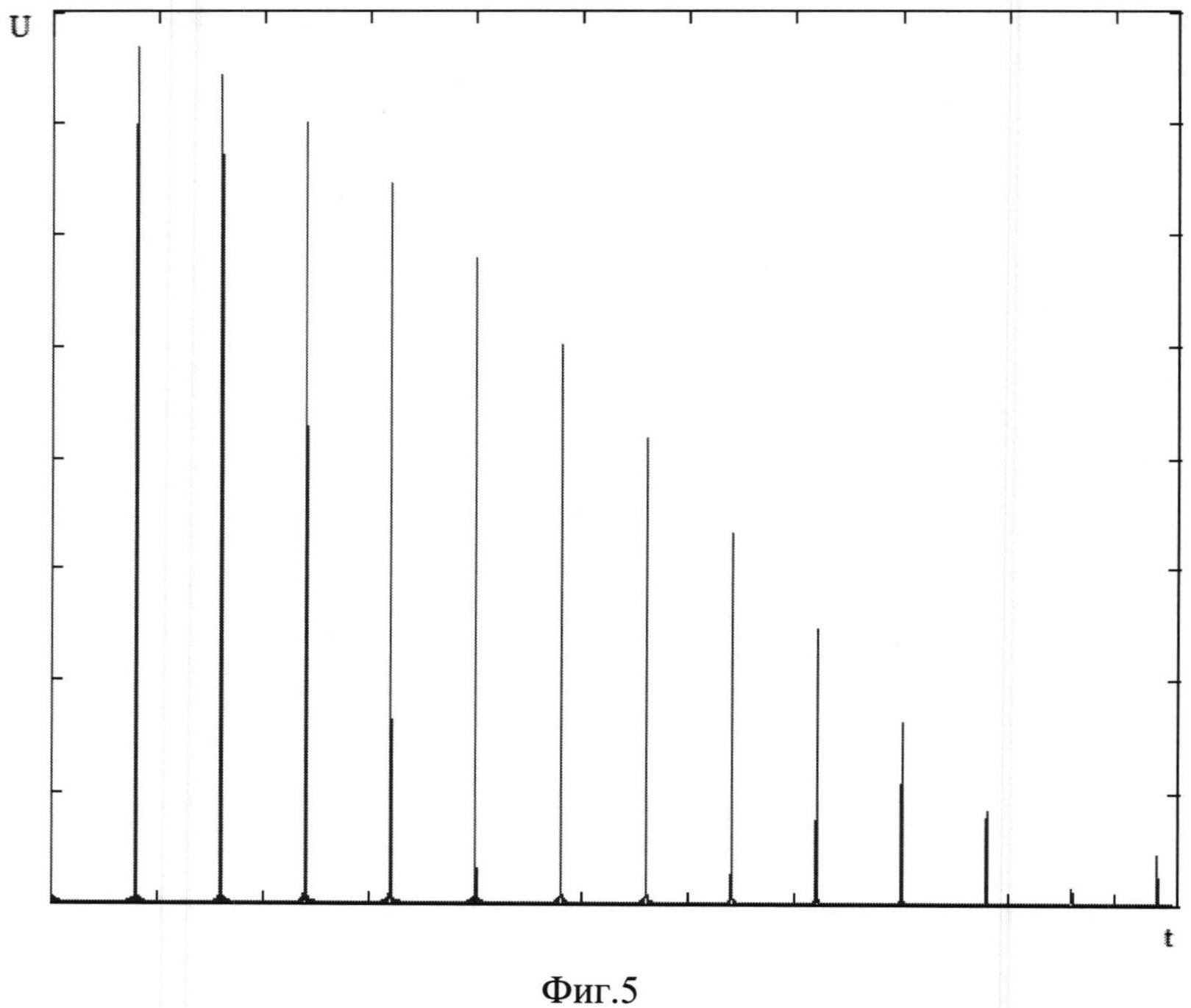
На фиг. 5 приведен вид взаимокорреляционной функции для расчетного примера.
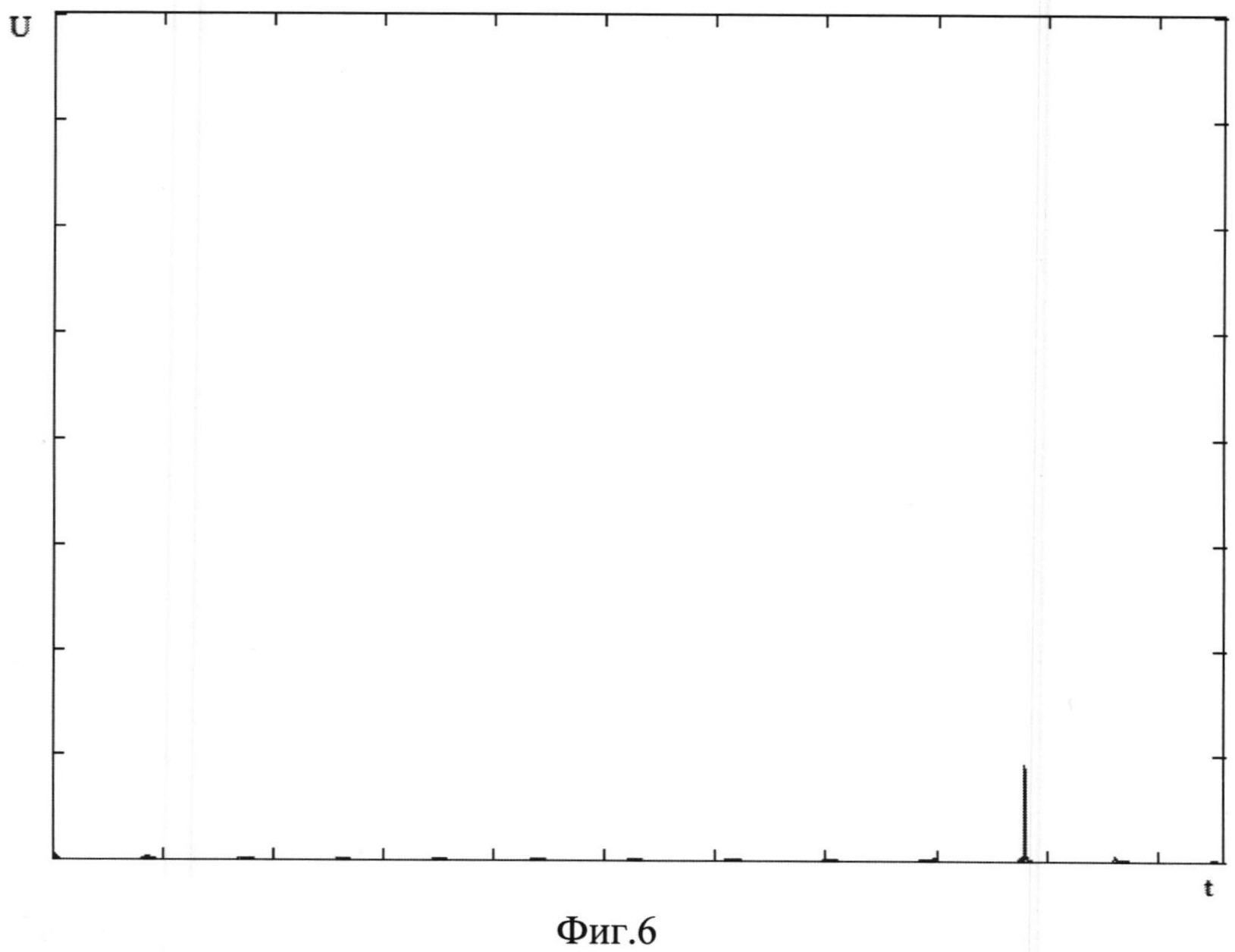
На фиг. 6 приведен вид автокорреляционной функции для расчетного примера, показывающий подавление десяти дифракционных лепестков.
Предлагаемый для лоцирования на малых дальностях зондирующий сигнал в виде прерывистого сигнала имеет периодическую структуру. При использовании прерывистого сигнала с линейной частотной модуляцией (ЛЧМ) его согласованную обработку можно представить как последовательное выполнение двух операций. Сначала осуществляют перемножение принятого сигнала на такой же, но смещенный по времени опорный сигнал, и получение сигнала разностной частоты (см. фиг. 1). Затем осуществляют интегрирование разностного сигнала за длительность всех подымпульсов опорного сигнала. При определенных взаимных смещениях принятого и опорного сигналов будут наблюдаться дифракционные максимумы - дифракционные лепестки (ДЛ). Действительно, это произойдет при укладывании целого числа волн разностной частоты λразн в период повторения Тп (см. фиг. 2), поэтому справедливо соотношение
 ,
,
где К=1, 2, 3…
Эти ДЛ оказывают негативное влияние, выражающееся, как уже отмечалось, в двух факторах: в неоднозначности определения местоположения отражающего объекта и во взаимном влиянии (помехах) объектов, смещенных по своему положению на период(ы) повторения ДЛ.
Из фиг. 1 видна связь между сдвигом подымпульса и разностной частотой. Из подобия треугольников и с учетом доплеровского смещения частоты fдоп за счет движения ЛА, можно записать
Исходя из (2) и (1), для К-го ДЛ справедливо соотношение

Доплеровская частота имеет порядок килогерц, а время Тп порядок микросекунд, поэтому доплеровским слагаемым, в первом приближении, можно пренебречь. В результате формулу для положения К-го ДЛ можно записать как
Отсюда следует, что период повторения ДЛ равен  и не зависит от временных параметров сигнала.
и не зависит от временных параметров сигнала.
Вместе с тем, наличие в опорном сигнале «нулевых зон» (опорный сигнал равен 0), приводит к появлению так называемых «нулевых зон» в АКФ. В пределах одного периода повторения подымпульсов Тп «нулевая зона» начинается в момент времени τи и заканчивается в (Тп - τи). Таким образом, возникает возможность добиться такого перекрытия двух временных последователностей (повторение «нулевых зон» и повторение ДЛ), чтобы некоторое требуемое количество ДЛ было подавлено за счет их попадания в «нулевые зоны» АКФ. Подбором разности периодов повторения ДЛ и подымпульсов возможно наложение К-го ДЛ на К-ю «нулевую зону», т.е. когда каждый ДЛ совпадает со своей «нулевой зоной».
Расстояние между двумя ближайшими дифракционными максимумами (период их повторения) равно
, поэтому для К-го ДЛ можно записать условия нахождения его в К-й «нулевой зоне» при заданной девиации сигнала:
где Nmin - количество подымпульсов, при котором К-й ДЛ находится в самом начале К-й «нулевой зоны», a Nmax - количество подымпульсов, при котором К-й ДЛ находится в самом конце К-й «нулевой зоны». Поэтому, если расположить первый ДЛ в конце первой «нулевой зоны» АКФ, то, так как все последующие ДЛ смещаются к началу соответствующей зоны, при оптимальном размещении некоторый К-й ДЛ встанет в начало К-й зоны. Приравняв количество подымпульсов в сигнале при условии Nmax1=NminK, получим выражение для количества подавляемых ДЛ:
Количество подавляемых ДЛ зависит от временных параметров (τи, Тп) подымпульсов и не зависит от девиации и количества подымпульсов, поэтому есть возможность менять Кmax, не изменяя при этом положение ДЛ, период повторения которых равен
.
Из условия нахождения первого ДЛ в конце первой «нулевой зоны» получаем условие на количество подымпульсов в сигнале:

функция Е[х] - целая часть от х
Далее, зная полученное, исходя из требуемого энергетического потенциала локатора, минимальное общее время излучения τс_min с/ш, можно вычислить минимальную длительность подымпульса

и определить максимально возможное количество подавляемых ДЛ Кmax в соответствии с выражением (4). Далее необходимо сравнить полученное значение Кmax с требуемым количество подавляемых ДЛ, которое определяется заданным значением подавления ДЛ. Т.к. расстояние между ДЛ равно максимальной дальности локации, то минимальное (учитывающее только увеличение дальности) подавление К-го ДЛ будет равно  . Отсюда получаем выражение для требуемого количества ДЛ:
. Отсюда получаем выражение для требуемого количества ДЛ:

где Lпод - требуемое задаваемое значение подавления ДЛ в дБ, функция Е[х] - целая часть от х. При этом Lпод определяется с учетом имеющихся пространственной и частотной развязок приемного тракта от зондирующего сигнала.
Если Ктр ≤ Кmax, то это означает, что выбранные параметры прерывистого зондирующего сигнала отвечают поставленным требованиям и могут только уточняться, исходя из требований их технической реализации.
Если же Ктр > Кmax, то нужно:
- увеличивать Rmax (увеличивая, таким образом, время τmax и количество подымпульсов N),
- уменьшать минимальную длительность подымпульса τи (задавая тем самым более жесткие требования к локатору),
- уменьшать требуемый уровень подавления ДЛ Lпод, но любым способом добиться выполнения условия Ктр ≤ Кmax.
После выполнения этого условия при необходимости уточняют длительность подымпульса из условия  количество подымпульсов
количество подымпульсов  , период повторения
, период повторения  .
.
Проведенные расчеты проводились в предположении, что длительность главного лепестка АКФ (и ДЛ также) значительно меньше τmax. В этом случае теоретически максимум первого ДЛ помещался точно в конец первой «нулевой зоны». При этом примерно половина ДЛ попадает в ненулевую зону. Аналогичная ситуация для Ктр-го ДЛ, который теоретически помещается (в худшем случае) в начало К-й «нулевой зоны». На практике при больших значениях девиации частоты это не имеет существенного значения. Тем не менее, чтобы подавить ДЛ полностью нужно несколько изменить положение «нулевых зон», т.е. изменить параметры τи и τmax.
Введем следующие обозначения:
Δτmax - приращение τmax относительно полученного ранее значения,
Δτи - приращение τи относительно начального значения,
Δτсж - полуширина ДЛ, определяемая девиацией частоты за длительность всего прерывистого сигнала.
Отметим, что для сохранения количества подавляемых максимумов Кmax τmax должно увеличиваться, а τи - уменьшаться. Т.е., новые значения будут

Тогда, чтобы подавить первый ДЛ полностью, нужно «нулевую зону» расширить вправо. При этом должно выполняться условие: Δτmax≥Δτсж.
Запишем абсолютное положение К-го максимума через исходные параметры сигнала и через скорректированные

Раскрыв скобки и убрав одинаковые члены, получим результат:
При согласованной обработке полуширина полученного центрального сжатого импульса, как и ширина половины ДЛ, определяются
При весовой обработке импульс расширяется в 1,5-2 раза, например, моделирование для окна Хэмминга дает результат примерно 1,8. Тогда для полуширины ДЛ можем записать:
Отсюда следует условие на минимальное Δτmax и Δτи:
В качестве примера можно рассмотреть выбор параметров сигнала при ближней локации в диапазоне до Rmax=3 км. Для определенности положим, что требуемый уровень подавления Lпод = 40 дБ, девиация частоты fдев =10 МГц, общая длительность излучения τс_min_с/ш = 40 мкс.
При этом:
время приема  ;
;
количество подымпульсов 
требуемое количество подавляемых 
минимальное значение длительности подымпульса (исходя из энергетических соображений) 
максимальное количество подавляемых 
Так как Ктр<Кmax, то длительность подымпульса может быть увеличена (что не противоречит указанным ранее энергетическим соображениям) до 
При использовании весовой обработки (окно Хэмминга):
 округляем (в большую сторону) до 0,2 мкс,
округляем (в большую сторону) до 0,2 мкс,
 округляем (в большую сторону) до 0,2 мкс.
округляем (в большую сторону) до 0,2 мкс.
Итоговые параметры сигнала:
Прерывистый сигнал с полученными параметрами может быть достаточно легко реализован на практике. ВКФ и АКФ такого сигнала с округленными для практической реализации значениями параметров τи_итог =1,8 мкс, τmax_итог =20,2 мкс, τп_итог=22 мкс приведены на фиг. 5 и фиг. 6 соответственно. Эти фигуры подтверждают подавление заданного количества ДЛ и эффективность предлагаемого способа.
Способ повышения разрешающей способности видеосистем
Ротор высокоскоростного генератора
Способ навигации, посадки и взлета вертолета
Способ задания виброударов
Способ поиска и обнаружения объекта
Способ обработки сверхширокополосных сигналов
Способ радиолокационного распознавания кораблей
Способ фильтрации нестационарных сигналов
Способ предотвращения продольного выкатывания воздушных судов за пределы взлетно-посадочной полосы и устройство для его осуществления
Способ обнаружения объектов
Способ повышения разрешающей способности видеосистем
Ротор высокоскоростного генератора
Способ навигации, посадки и взлета вертолета
Способ задания виброударов
Способ поиска и обнаружения объекта
Способ обработки сверхширокополосных сигналов
Способ радиолокационного распознавания кораблей
Способ поиска и обнаружения объекта
Способ обнаружения и определения координат искомого объекта
Способ информационного обеспечения вихревой безопасности полета летательных аппаратов

