Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к космической области и может быть использовано для осуществления контроля целостности спутниковой радионавигационной системы без участия средств наземного комплекса управления и контрольных станций, размещаемых глобально.
Уровень техники
При применении глобальных навигационных систем GPS и ГЛОНАСС, использование которых критически важно для решения навигационной задачи быстрых пользователей (ракеты, самолеты), особенно в режиме посадки и дозаправки, достоверность навигационного сигнала (НС) спутника крайне важна. Для системы ГЛОНАСС установлены требования ко времени между появлением несоответствия цифровой информации НС и истинным состоянием спутника и оповещением пользователя навигационного сигнала. Величина этого времени составляет единицы секунд вне зависимости от местоположения спутника. Процесс определения недостоверности принято называть контролем целостности системы. Наземные комплексы управления располагают контрольными средствами для определения достоверности навигационного сигнала и записи признака недостоверности на спутник. Но размещение этих средств на территории Российской Федерации не позволяет использовать их для спутников, не имеющих зону видимости с территории РФ, а также не позволяет выполнять требование по оперативности внесения в навигационный кадр признака недостоверности.
Из уровня техники известны технологии контроля целостности навигационной системы, раскрытые в /1/, /2/, /3/, /4/, /5/, /6/, /7/ и /8/.
Аналогом заявляемого технического решения является спутниковая навигационная система, раскрытая в /4/, сущность которой заключается в следующем.
В известной спутниковой навигационной системе осуществляется прием на наземных измерительных пунктах навигационных сигналов от спутников, измерение псевдодальности и передача результатов этих измерений от каждого измерительного пункта в центр обработки для последующих операций.
Предусматривается глобальное размещение контрольных станций, которые при выявлении недостоверности закладывают на спутник признак недостоверности навигационного сигнала, либо передают сообщение об этом в центр управления системой, который закладывает на спутник признак недостоверности.
Указанные технические решения имеют целый ряд недостатков:
- высокая цена глобального размещения и эксплуатации контрольных станций;
- необходимость создания для каждого спутника системы в случае непосредственной закладки признака недостоверности с контрольной станции дополнительной радиолинии: контрольная станция - спутник;
- возможность вмешательства в эту радиолинию третьих лиц и искажение результатов контроля целостности системы;
- необходимость создания системы оперативной связи с применением спутников-ретрансляторов для связи контрольных станций с центром управления системой и центра управления системой со спутником;
- низкая чувствительность наземных средств измерений к определению продольных и поперечных смещений спутников на орбите.
Наиболее близким по технической сущности к заявляемому техническому решению является способ и устройство контроля целостности спутниковой навигационной системы, раскрытый в /9/, сущность которого заключается в следующем.
Осуществляется контроль целостности спутниковой навигационной системы без участия средств наземного комплекса управления и контрольных станций, размещаемых глобально. При этом спутники системы определяют собственное местоположение и время места нахождения; выбирают спутники системы, находящиеся в зоне видимости, по заданному алгоритму и альманаху системы. Далее спутники принимают навигационные сигналы от выбранных спутников системы, содержащие информацию о местоположении и времени места нахождения выбранных спутников системы; определяют расчетные дальности до выбранных спутников системы, измеряют псевдодальности до выбранных спутников системы путем сравнения фазы навигационного сигнала выбранных спутников с собственной шкалой времени, после чего сравнивают расчетные дальности с измеренными псевдодальностями до выбранных спутников (определение невязок). Если невязки измерений превышают заданный допуск, то спутники системы излучают недостоверный навигационный сигнал и записывают признак недостоверности в навигационный кадр, если невязки измерений не превышают заданный допуск, то спутники излучают достоверный сигнал.
Указанное техническое решение имеет недостаток, заключающийся в невысокой достоверности контроля целостности. Из-за случайных сочетаний знаков и значений коэффициентов влияния, с некоторой вероятностью приводящих к взаимной компенсации, анализируемые разности измеренной псевдодальности и расчетной дальности в ряде случаев могут быть нечувствительны к аномальным отклонениям параметров орбиты спутников.
В частности, разности измеренной псевдодальности и расчетной дальности оказываются нечувствительны в пределах отдельной орбитальной плоскости к поперечным отклонениям параметров орбиты спутника.
В целях устранения указанного недостатка предлагается следующее изобретение.
Раскрытие изобретения
Задачей настоящего изобретения является осуществление контроля целостности спутниковой навигационной системы без участия средств наземного комплекса управления и контрольных станций, размещаемых глобально.
Техническим результатом заявленного технического решения является:
- повышение достоверности контроля целостности системы;
- повышение надежности контроля целостности системы.
Технический результат заявленного изобретения достигается тем, что способ контроля целостности спутниковой навигационной системы, заключающийся в том, что:
- определяют спутниками системы собственное местоположение и время предыдущего местоположения, например на 15 или 45 минуте каждого часа, на основе альманаха системы;
- определяют спутниками системы путем экстраполяции собственное местоположение и время места нахождения на текущую секунду на основе альманаха системы;
- выбирают спутниками системы спутники системы, находящиеся в зоне видимости, по заданному алгоритму и альманаху системы;
- принимают навигационные сигналы спутниками системы от выбранных спутников системы, находящихся в зоне видимости;
- считывают спутниками системы местоположение и время предыдущего местоположения с выбранных спутников системы, находящихся в зоне видимости, например на 15 или 45 минуте каждого часа, на основе навигационных сигналов от выбранных спутников системы;
- определяют спутниками путем экстраполяции местоположение и время местоположения выбранных спутников системы, находящихся в зоне видимости, на текущую секунду на основе альманаха системы;
- определяют расчетные дальности спутниками системы до выбранных спутников системы, находящихся в зоне видимости на любую текущую секунду;
- измеряют псевдодальности на любую текущую секунду спутниками системы до выбранных спутников системы, находящихся в зоне видимости, путем сравнения фазы навигационного сигнала выбранных спутников системы, находящихся в зоне видимости, с собственной шкалой времени;
отличающийся тем, что
- передают спутниками системы на выбранные спутники системы, находящиеся в зоне видимости, навигационный сигнал;
- принимают выбранными спутниками системы, находящимися в зоне видимости, от спутников системы, находящихся в зоне видимости, навигационный сигнал;
- считывают выбранными спутниками системы, находящимися в зоне видимости, навигационный сигнал, передаваемый со спутников;
- определяют выбранными спутниками путем экстраполяции собственное предшествовавшее текущему и текущее местоположение и время на основе альманаха системы, например на 15 или 45 минуте каждого часа;
- определяют расчетные дальности выбранными спутниками системы до спутников системы, находящихся в зоне видимости на любую текущую секунду;
- измеряют псевдодальности выбранными спутниками системы до спутников системы, находящихся в зоне видимости, путем сравнения фазы навигационного сигнала спутников системы, находящихся в зоне видимости, с собственной шкалой времени на любую текущую секунду;
- передают выбранными спутниками системы на спутники системы, находящиеся в зоне видимости, навигационный сигнал и информацию об измеренных псевдодальностях;
- вычисляют полусуммы и полуразности расчетных дальностей и измеренных псевдодальностей между спутниками и выбранными спутниками, находящимися в зоне видимости на любую текущую секунду;
- вычисляют значения величин смещения положения спутников от их оценочного положения на орбите и смещения шкалы времени на любую текущую секунду;
- сравнивают на спутниках системы рассчитанные значения величин смещения положения спутников от их оценочного положения на орбите и смещения шкал времени с пороговыми значениями на любую текущую секунду;
- по результатам сравнения рассчитанных значений, превышающих пороговые значения, делают вывод, что спутники излучают достоверный сигнал.
Устройство контроля целостности спутниковой навигационной системы, в состав которого входят спутники, при этом каждый спутник системы включает: вычислитель; формирователь навигационного сигнала; источник-передатчик навигационного сигнала; измеритель псевдодальностей до выбранных спутников системы, находящихся в зоне видимости; блок расчета дальностей до выбранных спутников системы, находящихся в зоне видимости; блок управления; блок принятия решений, причем вход-выход вычислителя соединен с блоком расчета дальностей до выбранных спутников системы, находящихся в зоне видимости, выход вычислителя соединен с первым входом формирователя навигационного сигнала; второй вход формирователя навигационного сигнала соединен с выходом блока принятия решений; второй вход блока принятия решений соединен с третьим выходом блока управления; второй выход измерителя псевдодальностей до выбранных спутников системы, находящихся в зоне видимости, соединен с первым входом блока расчета дальностей до выбранных спутников системы, находящихся в зоне видимости; первый выход блока управления соединен со вторым входом блока расчета дальностей до выбранных спутников системы, находящихся в зоне видимости; второй выход блока управления соединен с входом измерителя псевдодальностей до выбранных спутников системы, находящихся в зоне видимости; выход формирователя навигационного сигнала соединен с первым входом источника-передатчика навигационного сигнала; отличающееся тем, что в состав устройства введены блок расчета суммы и разности измеренных и расчетных значений псевдодальностей; блок расчета значений составляющих смещения положения спутника и его шкалы времени; блок сравнения разностей измеренных и расчетных смещений положения и шкалы времени спутника с порогом, причем первый вход блока принятия решений соединен с выходом блока сравнения разностей измеренных и расчетных смещений положения и шкалы времени спутника с порогом, первый вход блока сравнения разностей измеренных и расчетных смещений положения и шкалы времени спутника с порогом соединен с выходом блока расчета значений составляющих смещения положения спутника и его шкалы времени, первый вход блока расчета значений составляющих смещения положения спутника и его шкалы времени соединен с выходом блока расчета суммы и разности измеренных и расчетных значений псевдодальностей, первый вход блока расчета суммы и разности измеренных и расчетных значений псевдодальностей соединен с выходом блока расчета дальностей до выбранных спутников системы, находящихся в зоне видимости, второй вход блока расчета суммы и разности измеренных и расчетных значений псевдодальностей соединен с первым выходом измерителя псевдодальностей до выбранных спутников системы, находящихся в зоне видимости, третий вход блок расчета суммы и разности измеренных и расчетных значений псевдодальностей соединен с третьим выходом блока управления, четвертый выход блока управления соединен со вторым входом блока сравнения разностей измеренных и расчетных смещений положения и шкалы времени спутника с порогом, пятый выход блока управления соединен со вторым входом блок расчета значений составляющих смещения положения спутника и его шкалы времени, второй выход блока расчета дальностей до выбранных спутников, находящихся в зоне видимости, соединен со вторым входом источника-передатчика навигационного сигнала.
Вычислитель выполнен с возможностью определения цифровой информации для навигационного кадра, блок управления осуществляет координацию работы блока расчета дальностей до выбранных спутников системы, находящихся в зоне видимости, блока принятия решения и измерителя псевдодальностей до выбранных спутников системы, находящихся в зоне видимости.
В качестве выбранных спутников системы, находящихся в зоне видимости, используют спутники системы из той же плоскости и/или из других плоскостей.
Блок расчета дальностей до выбранных спутников системы, находящихся в зоне видимости, рассчитывает дальности на любую текущую секунду. Блок расчета дальностей до выбранных спутников системы, находящихся в зоне видимости, рассчитывает дальности последовательно или параллельно (одновременно). Измеритель псевдодальностей до выбранных спутников системы, находящихся в зоне видимости, измеряет псевдодальности последовательно или параллельно (одновременно).
Блок управления осуществляет координацию работы блока расчета суммы и разности измеренной псевдодальности и расчетной дальности, блок расчета суммы и разности измеренной псевдодальности и расчетной дальности определяет суммы и разности измеренной псевдодальности и расчетной дальности на любую текущую секунду последовательно или параллельно (одновременно).
В качестве выбранных спутников системы, находящихся в зоне видимости, используют спутники системы из той же плоскости и/или из других плоскостей.
С помощью наземного комплекса управления заблаговременно закладывают через приемопередающее устройство на каждый спутник альманах системы, содержащий по всем спутникам спутниковой навигационной системы справочную информацию о параметрах движения, а также данные по шкале времени бортового стандарта частоты. Выбор спутников, находящихся в зоне видимости, осуществляется по заданному алгоритму и альманаху системы.
Определение каждым спутником навигационной спутниковой системы полусумм и полуразностей расчетных дальностей и измеренных псевдодальностей между определяющимися спутниками и опорно-расчетными спутниками, находящимися в зоне видимости, осуществляют на любую текущую секунду. Измерение псевдодальности до выбранных спутников осуществляется последовательно или параллельно (одновременно) на основании альманаха системы или по программе, заблаговременно заложенной наземным комплексом управления.
Краткое описание чертежей
Признаки и сущность настоящего изобретения поясняются в последующем детальном описании, иллюстрируемом чертежами, где показано следующее:
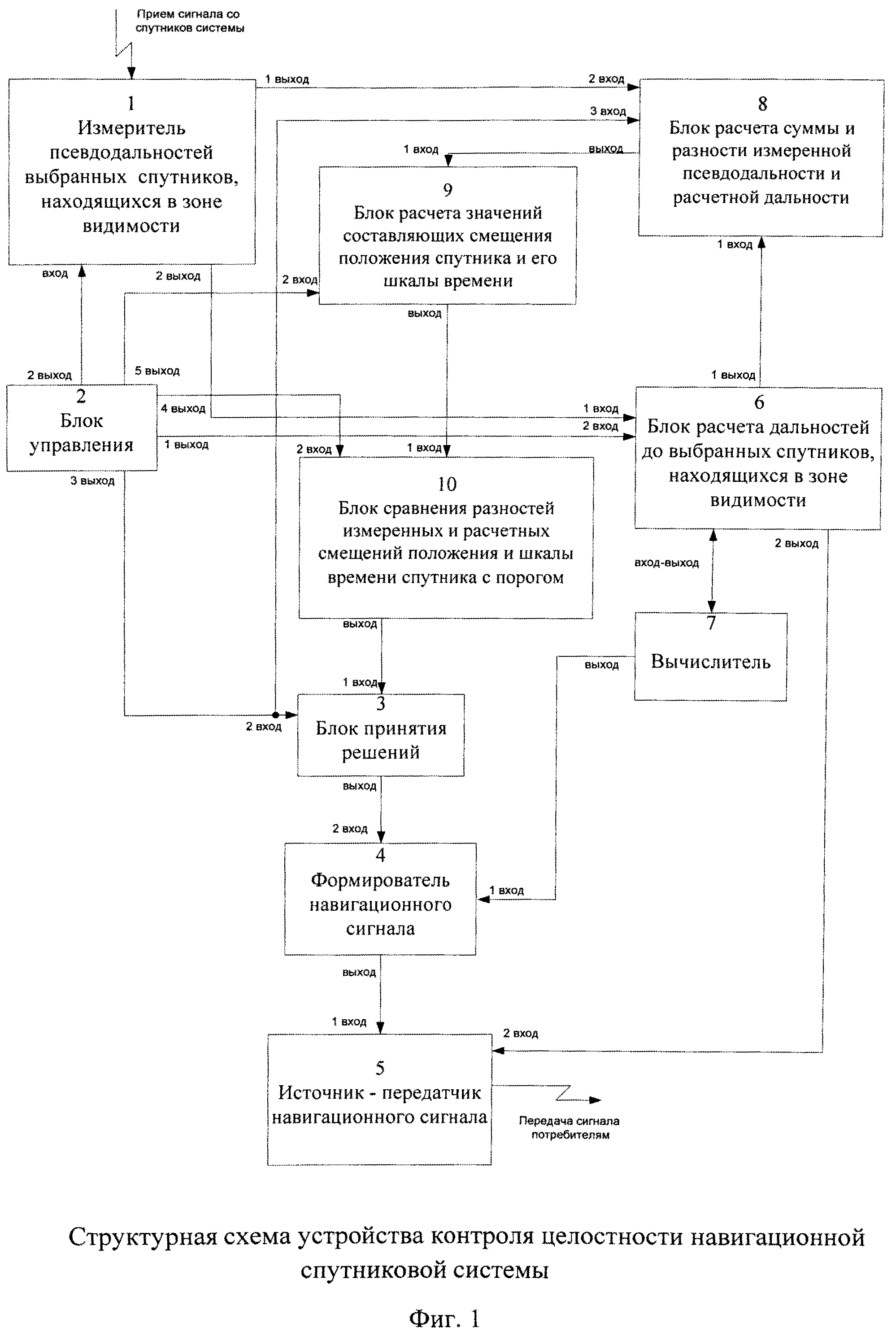
На фиг.1 представлена структурная схема устройства контроля целостности навигационной спутниковой системы, содержащая следующие блоки и обозначения:
1 - Измеритель псевдодальностей до выбранных спутников системы, находящихся в зоне видимости по заданному алгоритму и альманаху системы;
2 - Блок управления;
3 - Блок принятия решений;
4 - Формирователь навигационного сигнала;
5 - Источник-передатчик навигационного сигнала;
6 - Блок расчета дальностей до выбранных спутников системы, находящихся в зоне видимости;
7 - Вычислитель;
8 - Блок расчета суммы и разности измеренных и расчетных значений псевдодальностей;
9 - Блок расчета значений составляющих смещения положения спутника и его шкалы времени;
10 - Блок сравнения разностей измеренных и расчетных смещений положения и шкалы времени спутника с порогом.
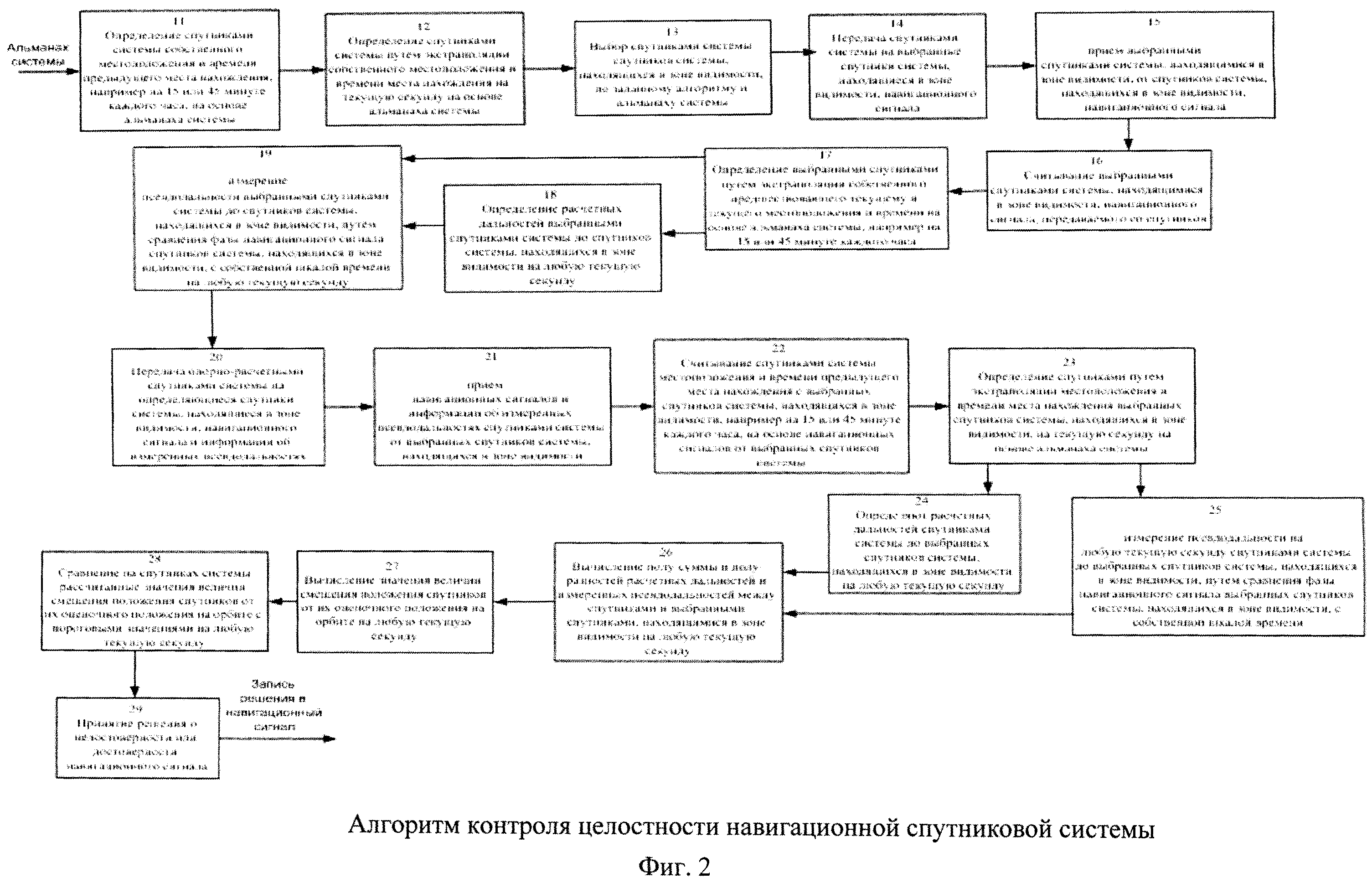
На фиг.2 представлен алгоритм контроля целостности навигационной спутниковой системы, где:
11 - Определение спутниками системы собственного местоположения и времени предыдущего места нахождения, например на 15 или 45 минуте каждого часа, на основе альманаха системы;
12 - Определение спутниками системы путем экстраполяции собственного местоположения и времени места нахождения на текущую секунду на основе альманаха системы;
13 - Выбор спутниками системы спутников системы, находящихся в зоне видимости, по заданному алгоритму и альманаху системы;
14 - Передача спутниками системы на выбранные спутники системы, находящиеся в зоне видимости, навигационного сигнала;
15 - Прием выбранными спутниками системы, находящимися в зоне видимости, от спутников системы, находящихся в зоне видимости, навигационного сигнала;
16 - Считывание выбранными спутниками системы, находящимися в зоне видимости, навигационного сигнала, передаваемого со спутников;
17 - Определение выбранными спутниками путем экстраполяции собственного предшествовавшего текущему и текущего местоположения и времени на основе альманаха системы, например на 15 или 45 минуте каждого часа;
18 - Определение расчетных дальностей выбранными спутниками системы до спутников системы, находящихся в зоне видимости на любую текущую секунду;
19 - Измерение псевдодальности выбранными спутниками системы до спутников системы, находящихся в зоне видимости, путем сравнения фазы навигационного сигнала спутников системы, находящихся в зоне видимости, с собственной шкалой времени на любую текущую секунду;
20 - Передача опорно-расчетными спутниками системы на определяющиеся спутники системы, находящиеся в зоне видимости, навигационного сигнала и информации об измеренных псевдодальностях;
21 - Прием навигационных сигналов и информации об измеренных псевдодальностях спутниками системы от выбранных спутников системы, находящихся в зоне видимости;
22 - Считывание спутниками системы местоположения и времени предыдущего места нахождения с выбранных спутников системы, находящихся в зоне видимости, например на 15 или 45 минуте каждого часа, на основе навигационных сигналов от выбранных спутников системы;
23 - Определение спутниками путем экстраполяции местоположения и времени места нахождения выбранных спутников системы, находящихся в зоне видимости, на текущую секунду на основе альманаха системы;
24 - Определение расчетных дальностей спутниками системы до выбранных спутников системы, находящихся в зоне видимости на любую текущую секунду;
25 - Определение расчетных дальностей спутниками системы до выбранных спутников системы, находящихся в зоне видимости на любую текущую секунду;
26 - Вычисление полусуммы и полуразностей расчетных дальностей и измеренных псевдодальностей между спутниками и выбранными спутниками, находящимися в зоне видимости на любую текущую секунду;
27 - Вычисление значения величин смещения положения спутников от их оценочного положения на орбите и смещения шкал времени на любую текущую секунду;
28 - Сравнение на спутниках системы рассчитанных значений величин смещения положения спутников от их оценочного положения на орбите и смещения шкал времени с пороговыми значениями на любую текущую секунду;
29 - Принятие решения о недостоверности или достоверности навигационного сигнала
Осуществление изобретения
Суть технического решения заключается в том, что каждый навигационный спутник определяет достоверность собственного излучаемого навигационного сигнала без участия наземных комплексов управления и контрольных станций, размещаемых глобально.
Причиной недостоверности может быть некорректная цифровая информация навигационного сигнала, ее несоответствие реальному состоянию спутника или несанкционированное нарушение стабильности бортового стандарта частоты.
Определение достоверности осуществляется путем расчета и оценивания значений величин смещения положения определяющихся спутников от их оценочного положения на орбите (вычисление полусумм и полуразностей расчетных и измеренных значений псевдодальностей между двумя спутниками, находящимися в зоне видимости, в прямом и в обратном направлениях с дальнейшим вычислением величин смещения) по отношению к другим спутникам системы.
В случае если величины смещения положения спутников от их оценочного положения на орбите по результатам измерений по нескольким выбранным опорным спутникам системы, находящимся в зоне видимости, превышают заданный допуск, это свидетельствует, что данный спутник излучает недостоверный навигационный сигнал и он должен в свой навигационный кадр записать признак недостоверности.
Поскольку каждый спутник системы непрерывно или синхронно с обновлением информации в навигационном кадре проводит указанные операции, то вся навигационная система находится под постоянным контролем целостности. При этом с минимальной задержкой, не превышающей времени обмена и срабатывания вычислительных процессов спутников, обеспечивается достоверность навигационного поля.
Реализации контроля целостности навигационной спутниковой системы осуществляется следующим образом.
На каждый спутник системы заблаговременно закладывается альманах системы, содержащий справочную информацию по всем спутникам системы, содержащую начальные условия движения, а также данные по шкале времени бортового стандарта частоты. На основании этой информации спутники определяют собственное положение на моменты времени, предшествующие текущему и текущий. Далее на спутниках происходит выбор опорных спутников по заданному алгоритму или по данным, заложенным наземным комплексом управления. Блок управления задает измерителю псевдодальностей до выбранных спутников, находящихся в зоне видимости, последовательное или одновременное измерение псевдодальности до выбранных спутников системы. В направлении выбранных опорных спутников излучается навигационный сигнал. На опорных спутниках измеритель псевдодальностей выбранных спутников системы измеряет псевдодальность до определяющихся спутников системы, находящихся в зоне видимости, на любую текущую секунду. Измерение псевдодальности осуществляется сравнением фазы навигационного сигнала выбранных спутников с собственной шкалой времени. Измеренные и расчетные значения псевдодальности и навигационный сигнал излучаются на определяющиеся спутники. Определяющиеся спутники по совокупности полученной информации вычисляют величины собственного смещения относительно расчетного оценочного положения и сравнивают их с порогом. При превышении порога одной или несколькими величинами смещения определяющегося спутника по результатам контроля от нескольких опорных спутников делается вывод о недостоверности излучаемого определяющимся спутником навигационного сигнала. Блок принятия решений при этом вносит в навигационный кадр, содержащий оперативную информацию для решения пользователем задачи позиционирования, определения вектора движения и привязки к времени системы, Госэталона, всемирного времени, признак недостоверности.
Для обеспечения надежности контроля операции измерения псевдодальностей и вычисления невязок проводятся каждым определяющимся спутником с несколькими (не менее трех) опорными спутниками, находящимися в зоне видимости.
Причиной недостоверности навигационного сигнала (сигнал на несущих частотах 1600 МГц, 1200 МГц, содержащий псевдослучайную кодовую последовательность, оцифрованную секунду и значения эфемерид и поправок к системному времени) могут быть:
- искажение цифровой информации навигационного кадра, составляемого вычислителем;
- несоответствие параметров движения спутника прогнозным значениям, вызываемое поведением спутника (погрешности ориентации, прохождение теней Земли и Луны и т.д.), нарушение стабильности бортового стандарта частоты и времени.
Выбор опорных спутников для осуществления контроля выполняется по алгоритму, реализуемому в вычислителе спутника.
Назначение блоков устройства (по фиг.1).
1. Измеритель псевдодальностей до выбранных спутников системы, находящихся в зоне видимости (поз.1) получает команду на выбор спутников, находящихся в зоне видимости, как объекта измерений от блока управления и предназначен для измерения псевдодальности до выбранных спутников системы, находящихся в зоне видимости. Измерение проводится путем приема и анализа навигационного сигнала с выбранных спутников, находящихся в зоне видимости, относительно собственной шкалы времени, контролируемыми спутниками. Значение измеренной псевдодальности поступает в блок расчета суммы и разности измеренных и расчетных значений псевдодальностей (поз.8) для определения смещений спутников.
2. Блок управления (поз.2) координирует работу составных частей устройства, реализуя задание на контроль целостности. Блок выполняет функцию выбора и/или задание на выполнение режима измерения псевдодальности до выбранных спутников, находящихся в зоне видимости: последовательно или одновременно (параллельно). Блок задает блоку (поз.6) расчет дальности до выбранных спутников, находящихся в зоне видимости.
3. Блок принятия решений (поз.3) сравнивает полученные значения величин смещения положения спутников от их оценочного положения на орбите по заданным спутникам, находящимся в зоне видимости, и смещения шкал времени с заданными пороговыми значениями (допусками), и выдает сигналы в формирователь навигационного сигнала (поз.4) для записи в цифровую информацию признака недостоверности или достоверности навигационного сигнала.
4. Формирователь навигационного сигнала (поз.4) с использованием информации вычислителя (поз.7) формирует цифровую информацию навигационного кадра. В структуре навигационного кадра предусмотрен разряд двоичного кода, в который по сигналу от блока принятия решения (поз.3) заносится признак недостоверности или достоверности.
5. Источник-передатчик навигационного сигнала (поз.5) на принятых в системе частотах излучает навигационный сигнал.
6. Блок расчета дальностей до выбранных спутников системы, находящихся в зоне видимости (поз.6).
В составе навигационного кадра (цифровая информация навигационного сигнала) содержится альманах системы, включающий справочные данные по параметрам движения и шкале времени всех спутников системы. Используя эти данные и цифровую часть навигационного сигнала от выбранных спутников, находящихся в зоне видимости, блок (поз.6) определяет параметры движения и фазу шкалы времени выбранных спутников системы, находящихся в зоне видимости. Имея значение местоположения, фазы шкалы времени, например, двух спутников (собственного и выбранного) блок (поз.6) вычисляет расчетное значение дальности между спутниками, которое затем используется для определения смещения положения спутников от их оценочного положения на орбите.
7. Вычислитель (поз.7).
В современных навигационных спутниках формирование цифровой составляющей навигационного сигнала происходит непосредственно на спутнике. Для этого с некоторой периодичностью, определяемой допустимой деградацией параметров движения и бортовой шкалы времени, обновляют средствами наземного комплекса управления начальные условия движения и полином «размножения» (определение прогнозных значений местоположения спутника и фазы бортовой шкалы времени). На основании этой информации вычислитель (поз.7) определяет указанные параметры и в цифровом виде выдает их в формирователь навигационного сигнала (поз.4). На момент времени осуществления контроля целостности системы вычислитель (поз.7) экстраполирует значение навигационных параметров, определяя их значение на секунду осуществления контроля. Выбор спутников (опорных), находящихся в зоне видимости, для осуществления контроля осуществляется по заданному алгоритму и альманаху системы, реализуемому в вычислителе спутника.
8. Блок расчета суммы и разности измеренных и расчетных значений псевдодальностей (поз.8) рассчитывает значения полусумм и полуразностей расчетной и измеренной псевдодальностей на основании измеренных и расчетных значений псевдодальности, полученных на определяющемся спутнике и полученных с опорного спутника. Сравнение может проводиться как в единицах измерения псевдодальности (километрах), так и в единицах времени (наносекундах). Определенные значения полусумм и полуразностей расчетной и измеренной псевдодальностей по каждому выбранному спутнику, находящемуся в зоне видимости, поступают в блок расчета значений составляющих смещения положения спутника и его шкалы времени (поз.9).
9. Блок расчета значений составляющих смещения положения спутника и его шкалы времени (поз.9) на основании данных, полученных из блока расчета суммы и разности измеренных и расчетных значений псевдодальностей (поз.8), рассчитывает значения смещения положения навигационного спутника от оценочного положения и смещение его шкалы времени.
10. Блок сравнения разностей измеренных и расчетных смещений положения и шкалы времени спутника с порогом (поз.10) сравнивает значения, полученные из блока расчета значений составляющих смещения положения спутника и его шкалы времени (поз.9) с порогом, задаваемым НКУ.
Алгоритм контроля целостности спутниковой навигационной системы (см. фиг.2) реализуется следующим образом.
Каждый спутник навигационной системы передает неограниченному кругу пользователей навигационный сигнал, содержащий расчетное значение его местоположения. С использованием начальных условий движения пользователь системы или контролирующие средства могут определять местоположение спутника на любую текущую секунду, включая назначаемую вперед. Контролируемые спутники выполняют эту операцию на основании цифровой информации, которую передают в своем навигационном сигнале. Имея альманах системы, операцию определения расчетного текущего местоположения на выбранную для выполнения операции контроля секунду можно определить для любого спутника системы. Выбор спутников (опорных), для которых определяется местоположение, осуществляется спутниками (контролируемыми) по заданному алгоритму и альманаху системы, но может задаваться заблаговременно наземным комплексом управления. Наличие местоположения спутников (контролируемого и опорных) обеспечивает возможность определения расчетной дальности между спутниками. Поскольку каждый спутник системы излучает навигационный сигнал, то у спутников есть возможность измерить эту дальность путем приема навигационного сигнала от выбранного спутника. С опорных спутников кроме навигационного сигнала на определяющиеся спутники передается измеренная на опорных спутниках псевдодальность и рассчитанная на опорных спутниках дальность.
Используя измеренную псевдодальность и расчетную дальность до выбранных спутников системы, находящихся в зоне видимости, на определяющихся спутниках можем вычислить полусуммы и полуразности этих величин. При наличии такой информации на определяющемся спутнике имеется возможность вычислить величины смещения его положения относительно расчетного и смещение шкалы времени. Сравнение полученных величин смещения с порогом может дать один из двух результатов:
1 - величины находятся в пределах допуска - свидетельствует о достоверности навигационного сигнала спутника (контролируемого), допуск на расхождение значений определяется владельцем навигационной системы в зависимости от того, какую предельную погрешность навигационных определений он считает возможным предоставить пользователю;
2 - величины не находятся в пределах допуска - свидетельствует о недостоверности навигационного сигнала одного из спутников системы.
Предложенное техническое решение исключает необходимость глобального размещения контрольных станций, создание системы связи контрольных станций с центром управления системой, включая применение спутников-ретрансляторов, вмешательство третьих лиц в процесс контроля целостности системы. Техническое решение обеспечивает предельно возможную оперативность контроля целостности системы.
Настоящее изобретение полезно тем, что оно может быть практически применено для развития и совершенствования спутниковой навигационной системы.
Промышленная применимость.
Настоящее изобретение относится к космической области и может быть использовано для радионавигационных определений с помощью искусственных спутников Земли, в частности для осуществления контроля целостности системы без участия средств наземного комплекса управления и контрольных станций, размещаемых глобально. Данное изобретение позволяет повысить оперативность оповещения пользователя о недостоверности навигационного сигнала; снизить затраты на реализацию задачи контроля целостности системы ввиду отсутствия наземных станций контроля и управления, размещаемых глобально; исключить дополнительные радиолинии; повысить достоверность контроля целостности системы; повысить надежность.
Проведенный анализ позволил установить: аналоги с совокупностью признаков, тождественных признакам заявленного технического решения, отсутствуют, что указывает на соответствие заявленного решения условию «новизна».
Результаты поиска известных решений с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленной системы, показали, что они не следуют явным образом из уровня техники, а также не установлена известность влияния отличительных признаков на указанный авторами технический результат. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
Источники информации, принятые во внимание
1. Спутниковая навигационная система по патенту Российской Федерации №2253128, оп. 27.05.2005, МПК7 G01S 5/00.
2. Спутниковая навигационная система по патенту Российской Федерации №2115137, оп. 10.07.1998, МПК7 G01S 5/00.
3. Спутниковая навигационная система по патенту Российской Федерации №2152050, оп. 27.06.2000, MПK7 G01S 5/14.
4. Спутниковая навигационная система по патенту Российской Федерации №2175771, оп. 10.11.2001, МПК7 G01S 5/14.
5. Спутниковая навигационная система по патенту США №5621646, оп. 15.04.1997, МПК G01S 1/00.
6. Спутниковая навигационная система по патенту США №5644318, оп. 01.07.1997, МПК G01S 5/14.
7. Спутниковая навигационная система по патенту США №5752218, оп. 12.05.1998, МПК G01S 5/00.
8. Спутниковая навигационная система по патенту США №5585800, оп. 17.12.2000, МПК G01S 5/14.
9. Способ и устройство контроля целостности спутниковой навигационной системы по патенту Российской Федерации №2411533, оп. 10.02.2011, МПК7 G01S 5/14 (прототип).
Малогабаритная свч-антенна на основе метаматериала
Электронное устройство оперативного восстановления измерений псевдодальности
Способ формирования навигационных радиосигналов навигационных космических аппаратов (нка) на геостационарной орбите (гсо) и/или навигационных космических аппаратов (нка) на геосинхронной наклонной орбите (гсно) с помощью земных станций и система для его реализации
Способ радиосвязи с землей постоянно действующей обитаемой базы на обратной (невидимой) стороне луны и система для осуществления данного способа
Способ обеспечения постоянной радиосвязи обитаемой базы на поверхности марса с землей и система для осуществления данного способа
Способ изготовления шунтирующего диода для солнечных батарей космических аппаратов
Устройство для приема дискретных сигналов
Активная пространственная передающая антенная решетка
Многодиапазонная антенна круговой поляризации с метаматериалом
Система для проведения испытаний на безотказность и электротермотренировки цифровых интегральных схем (ис) и сверхбольших интегральных схем (сбис)
Малогабаритная свч-антенна на основе метаматериала
Электронное устройство оперативного восстановления измерений псевдодальности
Способ формирования навигационных радиосигналов навигационных космических аппаратов (нка) на геостационарной орбите (гсо) и/или навигационных космических аппаратов (нка) на геосинхронной наклонной орбите (гсно) с помощью земных станций и система для его реализации
Способ радиосвязи с землей постоянно действующей обитаемой базы на обратной (невидимой) стороне луны и система для осуществления данного способа
Способ обеспечения постоянной радиосвязи обитаемой базы на поверхности марса с землей и система для осуществления данного способа
Способ изготовления шунтирующего диода для солнечных батарей космических аппаратов
Устройство для приема дискретных сигналов
Активная пространственная передающая антенная решетка
Многодиапазонная антенна круговой поляризации с метаматериалом
Система для проведения испытаний на безотказность и электротермотренировки цифровых интегральных схем (ис) и сверхбольших интегральных схем (сбис)

