Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И СКОРОСТИ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ
Вид РИД
Изобретение
Заявляемый способ определения координат и скорости источника радиоизлучения (ИРИ) относится к радиотехнике и может быть использован в навигационных, пеленгационных, локационных средствах для определения местоположения и скорости априорно неизвестного источника радиоизлучения (ИРИ).
Известен «Способ определения координат ИРИ», описанный в патенте США №4728959, МПК G01S 5/04, опубл. 08.08.1986 г. Он основан на приеме сигналов источников радиоизлучений в заданной полосе частот F группой из R>1 взаимосвязанных периферийных и центрального пеленгаторных пунктов с известным местоположением, измерении первичных пространственно-информационных параметров, преобразовании на пеленгаторных пунктах первичных пространственно-информационных параметров в пространственные параметры: азимутальный угол θ и угол места β с помощью преобразований Гильберта, определении уровня достоверности к полученным результатам по методу ХИ-квадрат, передаче результатов измерений пространственных параметров с периферийных пеленгаторных пунктов на центральный пеленгаторный пункт, определении местоположения ИРИ решением системы нелинейных уравнений методом наименьших квадратов.
Недостатками способа является отсутствие возможности определения скорости движущегося ИРИ вследствие неполного учета информации, заключенной в принимаемом сигнале, и низкая точность измерения координат вследствие реализации двухэтапного алгоритма измерений.
Наиболее близким по технической сущности к заявленному является "Способ и устройство определения координат источника радиоизлучения", описанный в патенте России RU №2263328, МПК 7 G01S 5/04, опубл. 27.10.2005 г. Способ основан на вычислении на подготовительном этапе количества N=S/S0 элементарных зон привязки, где S и S0 - соответственно площади зоны контроля и элементарной зоны привязки, определении координат местоположения центров элементарных зон привязки, присвоении каждой элементарной зоне привязки порядкового номера n=1, 2, …, N, определении для центрального и R периферийных пеленгаторных пунктов, антенная система каждого из которых включает M>2 антенных элементов, значений эталонных первичных пространственно-информационных параметров на выходах Ar, m-го антенного элемента, где r=1, 2, …, R+1; m=1, 2 … M, относительно координат местоположения центров каждой элементарной зоны привязки, причем эталонные первичные пространственно-информационные параметры рассчитывают для средних частот fp=Δf(2p-1)/2, где p=1, 2, … P, P=F/Δf - число частотных поддиапазонов, Δf - ширина частотного поддиапазона, в процессе работы при обнаружении сигнала источника радиоизлучения на частоте fp основан на измерении первичных пространственно-информационных параметров на выходах Ar, m-ных антенных элементов, причем измеренные первичные пространственно-информационные параметры на выходах антенных элементов периферийных пеленгаторных пунктов передают на центральный пеленгаторный пункт, вычислении для каждой n-й элементарной зоны привязки разности между эталонными и измеренными первичными пространственно-информационными параметрами, возведении их в квадрат и суммировании, выделении из N полученных сумм Kn(fp) минимальной, принятии за координаты местоположения обнаруженного источника радиоизлучения координат местоположения центра элементарной зоны привязки, соответствующих минимальной сумме min Kn(fp).
Из приведенного описания следует, что способ-прототип, обеспечивая местоопределение координат ИРИ, не обладает избирательностью по скорости движущегося ИРИ и, следовательно, не извлекает всю имеющуюся в принимаемых сигналах информацию. Таким образом способ-прототип не позволяет измерять скорость ИРИ.
Вместе с тем в современных условиях широкого распространения активных радиоэлектронных средств различных типов и назначения одним из основных направлений повышения качества информационного обеспечения управления в гражданской и военной сферах является совершенствование методов и техники радиоэлектронной разведки и, в частности, многопозиционных пассивных локационных систем, обеспечивающих высокоточное определение параметров ИРИ, основными из которых являются координаты, скорость и направление движения, как наиболее устойчивых признаков для разведки (идентификации) объектов.
Технической задачей заявляемого решения является расширение функциональных возможностей средств данного назначения за счет обеспечения одновременного измерения координат и скорости ИРИ.
В заявляемом способе поставленная цель достигается тем, что в известном способе определения координат источника радиоизлучения, основанном на вычислении количества N элементарных зон привязки возможного расположения ИРИ, определении координат местоположения центров элементарных зон привязки, присвоении каждой элементарной зоне привязки порядкового номера n=1, 2, …, N, задании полосы частот ΔF в которой ведется прием сигналов, разбиении заданной полосы частот ΔF на P поддиапазонов шириной Δf, присвоении каждому поддиапазону порядкового номера p=1, 2, …P, определении для R взаимосвязанных периферийных и центрального пеленгаторных пунктов (ПП) с известным их местоположением, каждый из которых включает M антенных элементов, значений эталонных первичных пространственно-информационных параметров (ППИП), на выходах всех антенных элементов, которые рассчитывают для средних частот всех частотных поддиапазонов, приеме сигналов ИРИ в заданной полосе частот ΔF всеми ПП, измерении ППИП для каждого антенного элемента всех ПП и передаче их с периферийных ПП на центральный ПП, дополнительно перед определением эталонных ППИП задают диапазоны ΔV1 и ΔV2 возможных значений составляющих скорости ИРИ, разбивают заданные диапазоны на G каналов каждый, присваивают каждому каналу порядковый номер c=1, 2 … G; d=1, 2…G, задают интервал обработки τ, определяемый шириной полосы частотного поддиапазона, и время накопления сигнала T, определяемое исходя из размеров рабочей зоны и конфигурации системы ПП, для каждого канала составляющих скорости, каждой элементарной зоны привязки, каждого антенного элемента всех ПП определяют значения эталонных ППИП, измеряют ППИП принятых сигналов исходя из ожидаемого положения ИРИ в каждом частотном поддиапазоне, на каждом антенном элементе всех ПП, далее для каждой элементарной зоны привязки, каждого антенного элемента всех ПП, каждого частотного поддиапазона и для каждого канала составляющих скорости определяют произведение измеренных и эталонных ППИП, полученные произведения суммируют по всем антенным элементам, находят абсолютное значение суммы и результат суммируют по частотным каналам, и по положению максимума результирующей суммы, определяемого по совокупности значений суммы в дискретных точках n, c, d, определяют координаты ИРИ и его скорость.
Скорость ИРИ V характеризуется величиной и направлением движения, т.е. представляет собой вектор. Вектор скорости V можно разложить относительно любого антенного элемента на две составляющие: радиальную VR и тангенциальную VT, причем VR направлена по прямой, проходящей через антенный элемент и ИРИ, a VT перпендикулярна VR. Вследствие эффекта Доплера при движении ИРИ изменяются как несущая частота и начальная фаза, так и наблюдаемое направление распространения сигнала излучаемого ИРИ (аберрация). При этом радиальная составляющая скорости обуславливает изменение несущей частоты и начальной фазы, а тангенциальная составляющая - явление аберрации. В способе-прототипе при формировании выходной статистики изменение параметров принимаемых сигналов под воздействием движения ИРИ не учитываются, что приводит к невозможности измерения скорости и может привести к значительным ошибкам измерения координат. В отличие от прототипа в заявляемом способе при формировании выходной статистики учитывается вызываемое эффектом Доплера изменение как частоты и начальной фазы, так и явление аберрации. Это обеспечивает полное согласование по координатам, скорости и направлению движения максимума выходной статистики предлагаемого способа с истинными параметрами ИРИ.
Проведенный анализ уровня техники позволяет установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявляемого способа определения координат и скорости источника радиоизлучения, в общедоступных источниках информации отсутствуют и, следовательно, заявляемый объект обладает свойством «новизна».
Исследование известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявляемого способа, показало, что они не следуют явным образом из уровня техники, из которого не выявлена также известность влияния преобразований, предусматриваемых существенными признаками заявляемого изобретения, на достижение указанного результата, что позволяет считать заявляемый объект соответствующим условию патентоспособности «изобретательский уровень».
Предлагаемый способ промышленно применим, так как совокупность характеризующих его признаков обеспечивает возможность его существования, работоспособности и воспроизводимости, а для реализации способа могут быть использованы известные материалы и оборудование, таким образом заявляемый объект обладает свойством «техническое решение».
Заявляемый способ поясняется чертежами, на которых показаны:
на фиг. 1 - структурная схема устройства, реализующая предлагаемый способ;
на фиг. 2 - порядок формирования элементарных зон привязки и присвоения им порядкового номера, порядок разбиения заданной полосы частот на поддиапазоны, порядок разбиения составляющих вектора скорости на каналы;
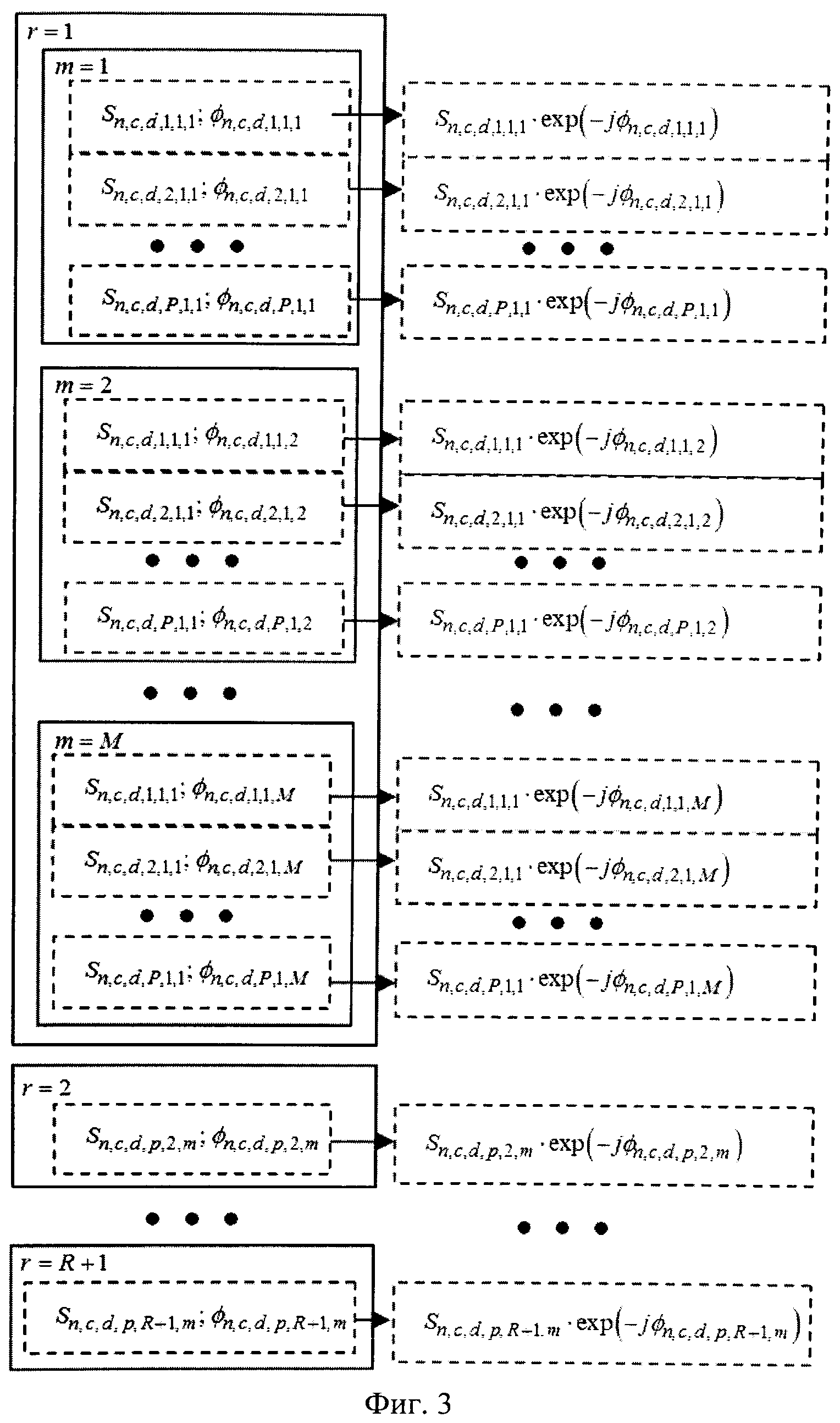
на фиг. 3 - порядок формирования эталонных массивов первичных пространственно-информационных параметров;
на фиг. 4 - порядок формирования массива измеренных первичных пространственно-информационных параметров;
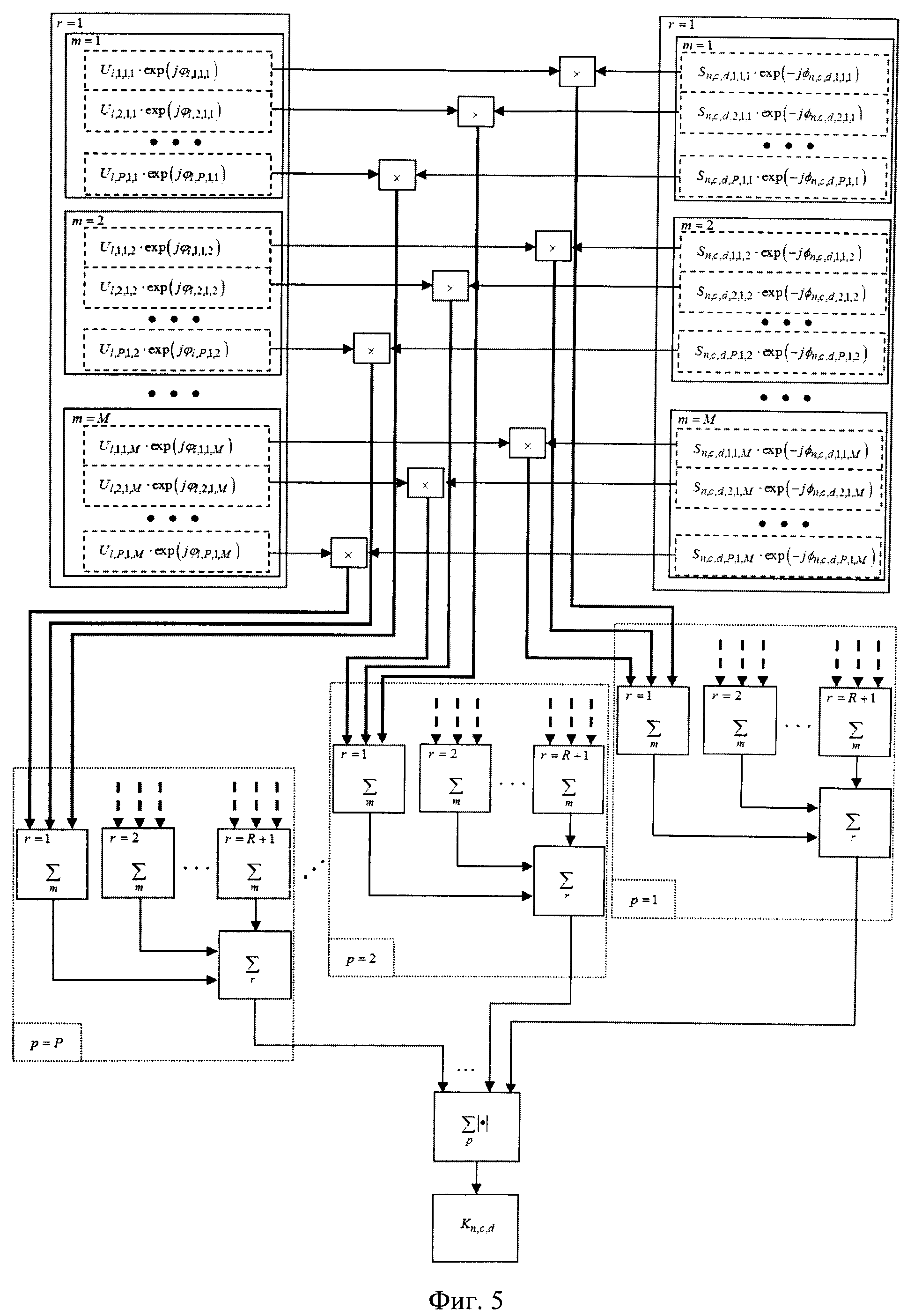
на фиг. 5 - очередность вычисления выходной статистики для n-й элементарной зоны привязки c, d-го каналов, составляющих вектора скорости;
на фиг. 6 - исходные данные для моделирования предлагаемого способа;
на фиг. 7 - результаты моделирования выходной статистики предлагаемого способа.
Устройство, реализующее предлагаемый способ, структурно представлено на фиг. 1. Оно содержит R идентичных периферийных пеленгаторных пунктов (ППП) 1, каждый из которых включает М идентичных антенных элементов (АЭ) 2, каждый из которых подключен к первым входам соответствующих цифровых радиоприемных устройств (ЦРПУ) 3, подключенных к запоминающим устройствам (ЗУ) 4, подключенным к первому входу аппаратуры передачи данных (АПД) 5, первым выходом соединенной со вторым входами ЦРПУ 3. И ЦПП 6, содержащий MАЭ 7, подключенных к первым входам соответствующих ЦРПУ 8, ЗУ 9.1-9.3, блок формирования выходной статистики (БФВС) 10, управляющее устройство (УУ) 11, двухканальный приемник (ДКП) 12, блок формирования эталонного набора первичных пространственно-информационных параметров (БФЭ ППИП) 13, АПД 14, блок принятия решения (БПР) 15. ЦРПУ 8 выходами подключены к первому входу ЗУ 9.2, выходом подключенному к первому входу БФВС 10, выходом подключенным к ЗУ 9.3, выходом подключенным к первому входу БПР 15. УУ 11 первым выходом подключено к входу ДКП 12, выходом подключенного к первому входу УУ 11, вторым выходом УУ 11 подключено ко второму входу БФВС 10, третьим выходом УУ 11 соединено с вторым входом БПР 15, четвертым выходом УУ 11 соединено с первым входом БФЭ ПИПП 13, выходом соединенным с ЗУ 9.1, выходом соединенным с третьим входом БФВС 10, пятым выходом УУ 11 соединено со вторым входом АПД 14, шестым выходом УУ 11 соединено со вторыми входами ЦРПУ 8. Первый выход АПД 14 соединен со вторым входом АПД 5, вторым выходом соединенным с первым входом АПД 14, вторым выходом АПД 14 связан со вторым входом ЗУ 9.2, третий выход АПД 14 связан со вторым входом БФЭ ППИП 13.
Устройство, реализующее заявляемый способ, функционирует следующим образом.
Перед началом работы осуществляют синхронизацию, определяют и вводят в УУ 11 исходные параметры системы:
1. Параметры зоны контроля S, в рамках которой осуществляют местоопределение ИРИ, делят S на элементарные зоны привязки S0. Размеры элементарной зоны привязки выбирают из условия обеспечения требуемой инструментальной точности местоопределения координат ИРИ, присваивают каждой из них порядковый номер из набора n=1, 2…. N. Определяют географические координаты центров элементарных зон привязки {Xn, Yn} (см. фиг. 2а).
2. Пространственные характеристики ПП: количество ППП R, количество антенных элементов в каждом ПП M, координаты (xr, m, yr, m} антенных элементов ПП.
3. Начальную частоту f0 и ширину частотного диапазона ΔF в рамках которого осуществляется определение координат и скорости ИРИ.
4. Заданный диапазон частот шириной ΔF делят на поддиапазоны, шириной Δf (см. фиг. 2б), причем ширину поддиапазона выбирают исходя из конфигурации системы согласно следующему правилу  где
где  - расстояние между центром n-й зоны привязки и Ar, m-м антенным элементом. Поддиапазоны, количество которых P=ΔF/Δf, также нумеруют p=1, 2, …, Р.
- расстояние между центром n-й зоны привязки и Ar, m-м антенным элементом. Поддиапазоны, количество которых P=ΔF/Δf, также нумеруют p=1, 2, …, Р.
5. Интервал обработки τ, определяемый шириной полосы частотного поддиапазона  , и время накопления сигнала T, определяемое исходя из размеров рабочей зоны и конфигурации системы приемных пунктов следующим образом
, и время накопления сигнала T, определяемое исходя из размеров рабочей зоны и конфигурации системы приемных пунктов следующим образом 
где  - время распространения сигнала из центра n-й точки рабочей зоны до Ar, m-го антенного элемента, С - скорость света.
- время распространения сигнала из центра n-й точки рабочей зоны до Ar, m-го антенного элемента, С - скорость света.
6. Задают диапазоны ΔV1 и ΔV2 возможных значений радиальной и тангенциальной составляющих скорости ИРИ относительно первого антенного элемента первого пеленгаторного пункта, разбивают заданные диапазоны на G каналов каждый, присваивают каждому каналу порядковый номер с=1,2…G; d=1,2…G (см. фиг. 2г).
На следующем этапе характеристики АЭ, координаты центров элементарных зон привязки УУ 11 вводятся в БФЭ ППИП 13, который определяет эталонные значения ППИП для средних частот  всех поддиапазонов частот. В качестве эталонных ППИП используют набор комплексных чисел, получаемых следующим образом
всех поддиапазонов частот. В качестве эталонных ППИП используют набор комплексных чисел, получаемых следующим образом 
где j - мнимая единица, Sn, c, d, p, r, m, ϕn, c, d, p, r, m - значения амплитуд и фаз сигналов, соответствующие каждому p-у частотному поддиапазону, Ar, m-у антенному элементу, n-й зоне привязки, c, d-м каналам радиальной и тангенциальной составляющих вектора скорости. Значения Sn, c, d, p, r, m и ϕn, c, d, p, r, m определяются в соответствии со следующими выражениями

 где
где  - вектор, соединяющий первый антенный элемент центрального пеленгаторного пункта с Ar, m-м антенным элементом;
- вектор, соединяющий первый антенный элемент центрального пеленгаторного пункта с Ar, m-м антенным элементом;
 - вектор, соединяющий центр n-й зоны привязки с первым антенным элементом центрального пеленгаторного пункта;
- вектор, соединяющий центр n-й зоны привязки с первым антенным элементом центрального пеленгаторного пункта;
C - скорость света;
 - c-й канал радиальной составляющей вектора скорости;
- c-й канал радиальной составляющей вектора скорости;
 - d-й канал тангенциальной составляющей вектора скорости;
- d-й канал тангенциальной составляющей вектора скорости;
Полученные эталонные первичные пространственно-информационные параметры сохраняют в ЗУ 9.1 в виде N×G×G эталонных массивов данных, вариант представления информации в которых показан на фиг. 3. Здесь в рамках первого массива приведена очередность следования эталонной информации для первой элементарной зоны привязки n=1, для первого канала радиальной составляющей вектора скорости c=1 и первого канала тангенциальной составляющей вектора скорости d=1 по всем R+1 пеленгаторным пунктам и P поддиапазонам частот. Порядок формирования остальных N×G×G-1 эталонных массивов данных аналогичен.
УУ 11 передает на ЦРПУ 8(3) начальную частоту f0, ширину частотного диапазона ΔF, ширину частотного поддиапазона Δf.
В процессе работы устройство, реализующее предлагаемый способ на ЦПП 6 с помощью ДКП 12, осуществляет поиск и обнаружение сигналов ИРИ в заданной полосе частот ΔF. При обнаружении сигнала УУ 11 формирует команду управления на начало работы, которая передается на ЦРПУ 8 и с помощью АПД 14(5) на ЦРПУ 3. По команде управления в ЦРПУ 8(3) из принятых каждым антенным элементом 7(2) сигналов длительностью T, для каждого k-го возможного положения ИРИ, k=1, …, N и частотного поддиапазона p измеряют значения амплитуд Uk, p, r, m, фаз φk, p, r, m и формируют значения ППИП  несущие всю необходимую информацию о поле сигнала в точках его приема, причем измерения ведутся по реализациям сигналов Sk, p, r, m(t), получаемым выборкой из принятых начиная с момента времени Ωr, m, n=t r, m, n-min t r, m, n и длительностью τ. Этим достигает компенсация фазовых набегов, обусловленных различным удалением ИРИ от ПП, и возможность дальнейшей когерентной обработки.
несущие всю необходимую информацию о поле сигнала в точках его приема, причем измерения ведутся по реализациям сигналов Sk, p, r, m(t), получаемым выборкой из принятых начиная с момента времени Ωr, m, n=t r, m, n-min t r, m, n и длительностью τ. Этим достигает компенсация фазовых набегов, обусловленных различным удалением ИРИ от ПП, и возможность дальнейшей когерентной обработки.
После завершения операции измерения первичных пространственно-информационных параметров на ППП 1 значения ПИПП через АПД 5(14) передаются на ЦПП 6, где записываются ЗУ 9.2. Значения параметров ППИП, измеренные ЦРПУ 8, также записываются в запоминающее устройство 9.2. Выполнение этих операций соответствует формированию массива измеренных первичных пространственно-информационных параметров, приведенных на фиг. 4. После завершения данной операции измеренные ППИП поступают на информационные входы БФВС 10. Также в БФВС 10 поступают эталонные значения ППИП, хранящиеся в ЗУ 9.1.
На следующем этапе реализации заявляемого способа в БФВС 10 для каждой n-й элементарной зоны привязки, каждого антенного элемента Ar, m всех ПП, каждого частотного поддиапазона p, каждого канала радиальной и тангенциальной составляющих вектора скорости c и d последовательно определяют произведения эталонных и измеренных первичных пространственно-информационных параметров, которые суммируют по всем антенным элементам, находят абсолютное значение суммы и результат суммируют по частотным каналам в соответствии с выражением

На фиг. 5 иллюстрируется порядок вычисления суммы Kn, c, d для n-й элементарной зоны привязки, с-го канала радиальной составляющей вектора скорости, d-го канала тангенциальной составляющей вектора скорости. Результаты формирования выходной статистики в БФВС 10 поступают на информационные входы ЗУ 9.3 и накапливаются там. БПР 15 осуществляет сравнение всех хранящихся в ЗУ 9.3 сумм и выбирает среди них максимальную. Номера ячеек памяти в блоке 9.3 находятся в однозначном соответствии с номерами элементарных зон привязки и каналов, составляющих вектора скорости, что позволяет БПР 15 принять решение о наиболее вероятном местоположении и значении скорости ИРИ в зоне контроля. На выходе БПР 15 формируются данные о координатах ИРИ и его скорости.
Таким образом, вся необходимая информация о поле сигнала из всех точек приема поступает на центральный пеленгаторный пункт и за один этап обработки преобразуется в искомые координаты и скорость ИРИ. Изложенное показано на фиг. 6, где представлены геометрия рассматриваемой системы и исходные данные для моделирования, и на фиг. 7, где показаны результаты моделирования заявляемого способа. На фиг. 7а представлена зависимость выходной статистики Kn, c, d от координаты X, при истинных значениях координаты Y и скорости ИРИ. На фиг. 7б представлена зависимость выходной статистики Kn, c, d от координаты Y, при истинных значениях координаты X и скорости ИРИ. На фиг. 7в представлена зависимость выходной статистики Kn, c, d от значений радиальной скорости VR, при истинных значениях координат и тангенциальной скорости VT ИРИ. На фиг. 7г представлена зависимость выходной статистики Kn, c, d от значений тангенциальной скорости VT, при истинных значениях координат и радиальной скорости VR ИРИ.
Таким образом из приведенных зависимостей следует, что максимум выходной статистики, формируемой заявляемым способом, соответствует искомым координатам и скорости ИРИ. Исходя из этого можно сделать вывод, что заявляемый способ позволяет за один этап обработки одновременно определять как координаты, так и скорость ИРИ.
В устройстве, реализующем предложенный способ, используются известные элементы и блоки, описанные в научно-технической литературе.
Варианты реализации антенных элементов 2(8) широко известны, в качестве них могут использоваться, например, антенны Rohde & Schwarz R&S®AC008 [Описание: httphttp://www.rohde-schwarz.ru/products/radiomonitoring/antennas/AC008/]. Цифровые радиоприемные устройства 3(8) могут быть реализованы с помощью модулей Rohde & Schwarz R&S®FSV с расширением R&S®IQR [Описание: httphttp://www.rohde-schwarz.ru/products/test_and_measurement/spectrum_analysis/FSV]. В качестве двухканального приемника 12 может быть использован Rohde & Schwarz R&S®UMS200 [Описание: httphttp://www.rohde-schwarz.ru/products/radiomonitoring/receivers/UMS200/]. Блоки формирования эталонного набора первичных пространственно-информационных параметров 13, формирования выходной статистики 10, принятия решения 15 и управляющее устройство 11 могут быть реализованы на базе цифровых сигнальных препроцессоров, например процессоров на микросхемах серии "Мультикор" [Описание: httphttp://multicore.ru/index.php?id=27]. Запоминающие устройства 4(9) представляют собой стандартные модули SDRAM/FLASH/SSD, например Micron MT16JSF25664H [Описание: httphttp://download.micron.com/pdf/datasheets/modules/ddr3/file:///jsfl6c256x64h.pdf×]. Аппаратура передачи данных 5(14) может быть реализована на базе стандартных Ethernet модулей, например Intel® 82541ER Gigabit Ethernet Controller [Описание: httphttp://www.intel.com/content/www/us/en/ethernet-controllers/82541er-gbe-controller-datasheet.html].
Способ определения координат и скорости источника радиоизлучения (ИРИ), основанный на вычислении количества N элементарных зон привязки возможного расположения ИРИ, определении координат местоположения центров элементарных зон привязки, присвоении каждой элементарной зоне привязки порядкового номера n=1, 2, …, N, задании полосы частот ΔF, в рамках которой ведется прием сигналов, разбиении заданной полосы частот ΔF на P поддиапазонов шириной Δf, присвоении каждому поддиапазону порядкового номера p=1, 2, … P, определении для R взаимосвязанных периферийных и центрального пеленгаторных пунктов (ПП) с известным их местоположением, каждый из которых включает M антенных элементов, значений эталонных первичных пространственно-информационных параметров (ППИП), на выходах всех антенных элементов, которые рассчитывают для средних частот всех частотных поддиапазонов, приеме сигналов ИРИ в заданной полосе частот ΔF всеми ПП, измерении ППИП для каждого антенного элемента всех ПП и передаче их с периферийных ПП на центральный ПП, отличающийся тем, что перед определением эталонных ППИП задают диапазоны ΔV1 и ΔV2 возможных значений составляющих скорости ИРИ, разбивают заданные диапазоны на G каналов каждый, присваивают каждому каналу порядковый номер c=1, 2 … G, d=1, 2 … G, задают интервал обработки τ, определяемый шириной полосы частотного поддиапазона, и время накопления сигнала T, определяемое исходя из размеров рабочей зоны и конфигурации системы ПП, для каждого канала составляющих скорости, каждой элементарной зоны привязки, каждого антенного элемента всех ПП определяют значения эталонных ППИП, измеряют ППИП принятых сигналов исходя из ожидаемого положения ИРИ в каждом частотном поддиапазоне, на каждом антенном элементе всех ПП, далее для каждой элементарной зоны привязки, каждого антенного элемента всех ПП, каждого частотного поддиапазона и для каждого канала составляющих скорости определяют произведение измеренных и эталонных ППИП, полученные произведения суммируют по всем антенным элементам, находят абсолютное значение суммы и результат суммируют по частотным каналам, и по положению максимума результирующей суммы, определяемого по совокупности значений суммы в дискретных точках n, c, d, определяют координаты ИРИ и его скорость.

Способ выделения вектора признаков для распознавания изображений объектов и устройство для его осуществления
Преобразователь частоты с использованием зеркального канала
Способ оптимального восстановления изображений в радиолокационных системах дистанционного зондирования земли в телескопическом режиме
Способ устранения импульсных помех на цветных изображениях
Радиолокационная станция
Датчик для исследования потоков метеороидных и техногенных частиц в космическом пространстве
Генератор паров щелочного металла
Сверхзвуковой летательный аппарат и способ реализации его полета
Акустооптический приемник
Способ регистрации подводных объектов
Преобразователь частоты с использованием зеркального канала
Способ оптимального восстановления изображений в радиолокационных системах дистанционного зондирования земли в телескопическом режиме
Способ устранения импульсных помех на цветных изображениях
Радиолокационная станция
Датчик для исследования потоков метеороидных и техногенных частиц в космическом пространстве
Генератор паров щелочного металла
Сверхзвуковой летательный аппарат и способ реализации его полета
Акустооптический приемник
Способ регистрации подводных объектов
Пироклапан

