Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЗИРОВАННОГО ВЫЯВЛЕНИЯ КОМПАКТНЫХ ГРУПП ВЗАИМОДЕЙСТВУЮЩИХ ВОЗДУШНЫХ ОБЪЕКТОВ
Вид РИД
Изобретение
Изобретение относится к радиолокации и может быть использовано для радиолокационного сопровождения воздушных объектов (ВО).
В настоящее время радиолокационные системы (РЛС) являются основным средством обнаружения и сопровождения ВО. Все современные РЛС имеют ограниченную пропускную способность. В связи с этим в случаях массированного применения ВО, характерного для военных конфликтов последних десятилетий, количество обнаруженных ВО может превысить указанное ограничение, в результате чего РЛС не сможет в полной мере обеспечить решение поставленной перед ней задачи. Это явление известно под названием «эффекта роя» [1].
Современные способы применения авиации предусматривают широкое использование групповых действий ВО, в том числе в составе групп с малым расстоянием между объектами. В связи с этим возникает необходимость выявления таких групп ВО в процессе анализа воздушной обстановки. Кроме того, сопровождение одиночных объектов в составе таких групп, выполняемое в современных РЛС с помощью стробов отождествления, существенно осложняется из-за многократного пересечения стробов [2].
Эти проблемы могут быть преодолены путем обобщения (укрупнения) обрабатываемой и отображаемой информации о воздушной обстановке. Обобщение информации может заключаться в выявлении компактных групп (группировании) ВО, решающих общую задачу в ходе боевых действий. Выявленная группа взаимодействующих ВО может сопровождаться и отображаться как одна цель, а не как несколько целей, что позволит снизить нагрузку на РЛС и ее операторов [3].
В настоящее время группирование взаимодействующих ВО как правило выполняется вручную оператором РЛС [3], что создает для него дополнительную нагрузку.
Таким образом, задача автоматизации выявления компактных групп взаимодействующих ВО является весьма актуальной.
Известные в настоящее время способы автоматизированного группирования ВО предназначены для достижения следующих целей:
- сокращения объема информации, отображаемой для лиц, принимающих решения (ЛПР);
- облегчения определения состава группировки и выявления замысла удара средств воздушного нападения;
- сокращения объема информации, обрабатываемой вычислительными средствами и передаваемой по канала передачи данных.
Группирование как правило осуществляется с использованием следующих признаков взаимодействия ВО в составе группы [4, 5]:
- относительно малого расстояния между объектами в пространстве, обеспечивающего возможность визуального или радиолокационного контакта между ними;
- совпадения курсов и скоростей объектов в группе.
Таким образом, для группирования могут использоваться такие координаты состояния (КС) ВО, как дальности до ВО, их азимуты, углы места, радиальные скорости, прямоугольные координаты, модули скоростей и курсы. Выделяют группирование на основе первичной радиолокационной информации (РЛИ), включающей в себя наклонные дальности, азимуты, углы места и радиальные скорости ВО [3]. Группирование ВО и формирование трасс групповых объектов непосредственно по данным первичной РЛИ позволяет решить следующие задачи:
- предварительного анализа воздушной обстановки;
- исключения трудоемкой операции селекции отметок отдельных ВО, выполняющих полет в составе группы с малым расстоянием между объектами, полученных на разных обзорах воздушного пространства РЛС, необходимой для индивидуального сопровождения ВО.
Известны различные подходы к автоматизации группирования ВО. В [4] предлагается производить группирование так, чтобы обеспечить минимум отношения rср/Rср, где rср - среднее расстояние между объектами в группе, Rcp - среднее расстояние между группами в пространстве, включающем координаты объектов, их курсы, скорости, а также признаки государственной принадлежности и т.п. Автоматическое решение данной задачи основывается на упорядоченном переборе вариантов разбиения множества наблюдаемых ВО на группы и поиске варианта, обеспечивающего минимум rср/Rср. Основным недостатком этого подхода является необходимость многократного порождения вариантов разбиения множества ВО на группы.
Более простой с точки зрения реализации способ группирования предложен в [5]. Согласно этому способу множество обнаруженных ВО представляется в виде графа их взаимодействия. Вершины этого графа соответствуют наблюдаемым ВО, а ребра отражают возможность взаимодействия между парой ВО. Связные компоненты данного графа [6] представляют собой группы взаимодействующих ВО. При этом можно выделить два вида взаимодействия в составе группы:
- непосредственное взаимодействие, когда пара ВО связана ребром в графе взаимодействия;
- опосредованное взаимодействие, когда между парой ВО существует не менее одного пути в графе взаимодействия и все пути между содержат более одного ребра.
Условие непосредственного взаимодействия пары ВО формально выражается следующим образом. Пусть для ВО p и q заданы векторы их КС  и
и  соответственно. Компонентами данных векторов могут быть наклонная дальность, азимут, угол места и радиальная скорость ВО. Тогда непосредственное взаимодействие между ВО p и q возможно при выполнении следующего условия:
соответственно. Компонентами данных векторов могут быть наклонная дальность, азимут, угол места и радиальная скорость ВО. Тогда непосредственное взаимодействие между ВО p и q возможно при выполнении следующего условия:

где εi - априорно заданное максимально допустимое для взаимодействующих ВО различие значений i-x КС. Значение εi может быть определено априорно на основе изучения опыта групповых действий авиации [7].
Единого подхода к выбору значения εi для различных КС в настоящее время не существует. Так, например, в [3] значения εi для пространственных координат ВО определяются исходя из того, что ВО взаимодействуют в составе группы на основе визуального или радиолокационного наблюдения друг друга. При этом выбор значения εi зависит от освещенности, метеоусловий, характеристик бортовых РЛС ВО и других факторов. С учетом этих обстоятельств в [3] для прямоугольных координат ВО на плоскости предлагается использовать значения εi в пределах от 200 м до 5000 м.
Таким образом, в качестве подхода для определения размеров строба группирования ВО по различным КС можно принять экспертную оценку значений εi.
Задача группирования ВО решается как задача выявления связных компонент графа взаимодействия ВО. В [5] показано, что наилучшим с точки зрения временных затрат алгоритмом решения данной задачи является алгоритм обхода графа в глубину [8].
Существенный недостаток описанного способа группирования ВО заключается в том, что результат проверки условий (1) может меняться при случайных изменениях разностей КС пары ВО вблизи порогового значения, вызванных ошибками их оценивания, в то время как действительного изменения состава групп ВО не происходит. В то же время, поскольку с тактической точки зрения наибольшую опасность представляют собой именно группы взаимодействующих ВО, важно, с одной стороны, как можно раньше выявлять образование таких групп, а с другой стороны, не допускать преждевременного снятия их с сопровождения в результате кратковременного расхождения ВО или случайных изменений оценок их КС.
Для преодоления указанного недостатка необходимо использовать более мягкие условия принадлежности пары ВО к одной группе, позволяющие производить оценку достоверности решения о принадлежности ВО к выявленным группам. При этом использование нескольких степеней достоверности позволит смягчить влияние случайных изменений оценок КС ВО на результат группирования. Для этого нужно представлять в явном виде неопределенность значений КС ВО, возникающую вследствие ошибок их оценивания, и учитывать ее при проверке пар ВО на принадлежность к одной группе.
В настоящее время неизвестны источники, в которых опубликованы способы группирования ВО, реализующие учет неопределенности КС ВО и оценку достоверности принадлежности ВО к выделенным группам.
Ближайшим аналогом (прототипом) является указанный выше способ группирования ВО, использующий выражение (1) в качестве условия принадлежности пары ВО к одной группе, представление множества ВО в виде графа их взаимодействия и алгоритм поиска в глубину для выявления групп ВО.
Целью заявленного изобретения является разработка способа выявления компактных групп взаимодействующих ВО, обеспечивающего учет неопределенности значений их КС в явном виде и оценку достоверности принадлежности ВО к выделенным группам.
Технический результат изобретения состоит в увеличении времени сопровождения групп ВО за счет более раннего их выявления и предотвращения преждевременного снятия с сопровождения, снижении нагрузки на операторов РЛС, получении явных оценок степени достоверности результатов группирования с учетом неопределенности КС ВО.
Технический результат достигается за счет того, что в отличие от прототипа значения числовых КС ВО представляют интервалами. Вводят три типа отношений между парами ВО (отсутствие взаимодействия, возможное взаимодействие, достоверное взаимодействие). Для задания этих отношений используют арифметические операции и отношения над интервалами [9, 10]. Все множество наблюдаемых ВО представляют в виде графа их взаимодействия с двумя типами ребер, соответствующих возможной и достоверной принадлежности пары объектов к одной группе. С помощью модифицированного алгоритма поиска в глубину выявляют возможные и достоверные группы ВО. Состав достоверных и возможных групп ВО отображают для ЛПР.
Исходными данными для группирования ВО являются оценки КС ВО, полученные в результате первичной обработки РЛИ. Информация о каждом наблюдаемом ВО p поступает в виде вектора измеренных значений его КС  , где для всех
, где для всех 
 - фактическое значение i-й КС ВО p,
- фактическое значение i-й КС ВО p,  - ошибка ее измерения. Координата
- ошибка ее измерения. Координата  соответствует наклонной дальности до ВО,
соответствует наклонной дальности до ВО,  - азимуту ВО,
- азимуту ВО,  - углу места ВО,
- углу места ВО,  - радиальной скорости ВО.
- радиальной скорости ВО.
Поскольку на результат измерений КС оказывает воздействие совокупность большого количества разнообразных случайных процессов, то в силу центральной предельной теоремы можно считать распределение значений величины
гауссовским. Тогда отклонение измеренного значения i-й КС ВО р от фактического с вероятностью, близкой к единице, не превышает  , где
, где  - среднеквадратичное отклонение (СКО) величины
.
- среднеквадратичное отклонение (СКО) величины
.
Таким образом, каждая КС может быть представлена интервалом с нижней и верхней границами

соответственно, где  - текущая оценка i-й КС ВО p,
- текущая оценка i-й КС ВО p,  .
.
Неопределенность сравниваемых интервальных КС ВО приводит к неопределенности результатов их попарного сравнения и, как следствие, к неопределенности результата проверки условий взаимодействия пары ВО, предложенных в [5]. Для учета этой неопределенности на множестве ВО вводятся три типа отношений взаимодействия между парами ВО:
- отсутствия взаимодействия;
- возможного взаимодействия;
- достоверного взаимодействия.
Как и в прототипе данного изобретения, для представления информации о ВО и отношений между ними используется граф взаимодействия ВО G=〈V, E〉, где V - множество вершин графа, каждая из которых соответствует некоторому ВО, Е - множество ребер, отражающих наличие взаимодействия между ВО.
Однако в отличие от прототипа ребро графа может отображать уже один из двух видов непосредственного взаимодействия, а именно:
- возможное непосредственное взаимодействие;
- достоверное непосредственное взаимодействие.
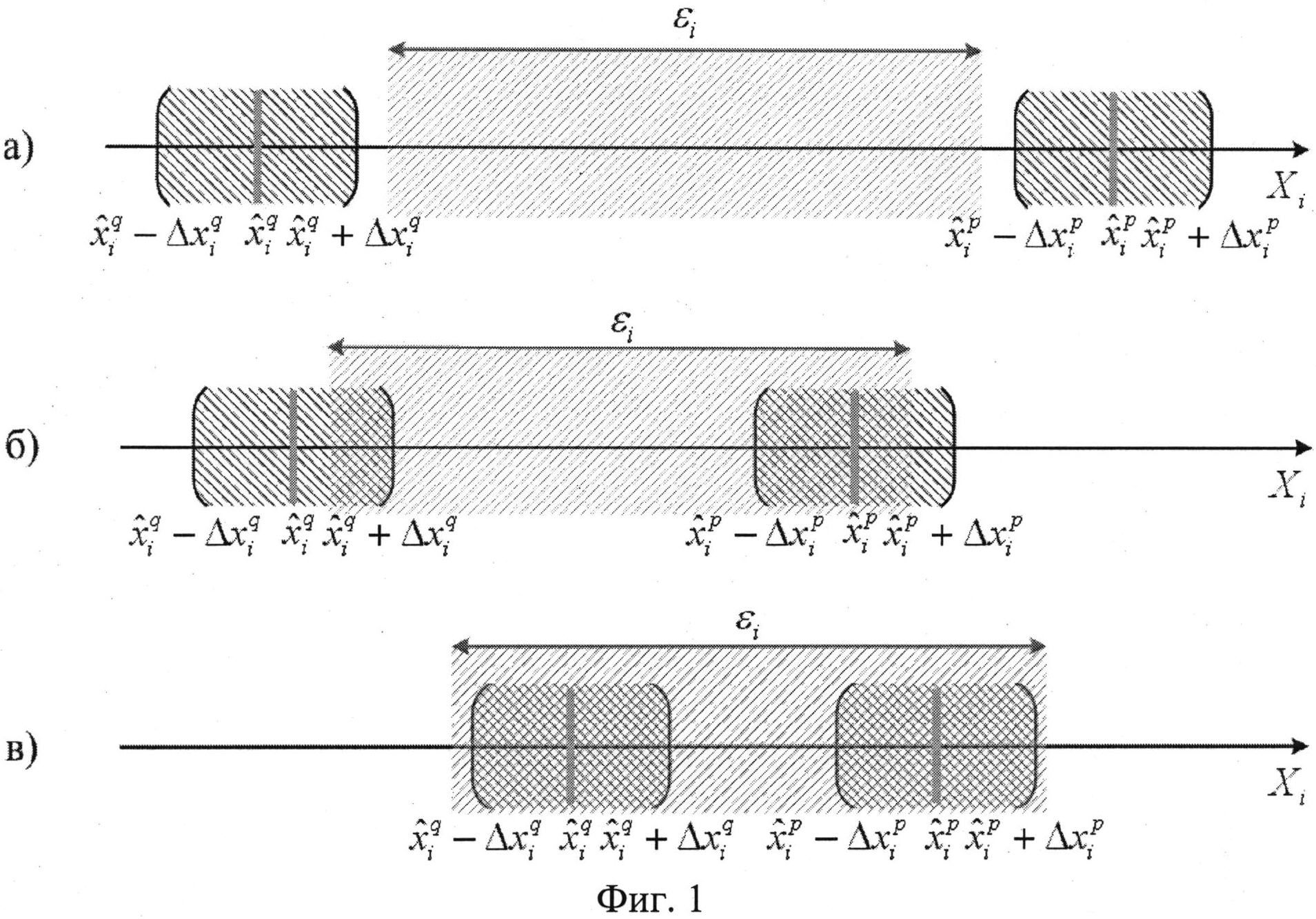
В отличие от прототипа применяется следующее правило проверки наличия непосредственного взаимодействия между парой ВО р и q, полученное путем модификации условия (1) с использованием арифметических операций над интервалами [9] и отношения неравенства интервалов [10].
Если существует i∈{1, 2, …, n} такое, что  (см. фиг.1а), то ВО p и q не взаимодействуют.
(см. фиг.1а), то ВО p и q не взаимодействуют.
В противном случае, если существует i∈{1, 2, …, n} такое, что  и
и  (см. фиг.1б), то ВО р и q возможно непосредственно взаимодействуют.
(см. фиг.1б), то ВО р и q возможно непосредственно взаимодействуют.
В противном случае, когда для всех 
 (см. фиг.1в), ВО р и q достоверно непосредственно взаимодействуют.
(см. фиг.1в), ВО р и q достоверно непосредственно взаимодействуют.
Кроме того, в отличие от прототипа вводятся два вида опосредованного взаимодействия, а именно:
- возможное опосредованное взаимодействие;
- достоверное опосредованное взаимодействие.
Возможное опосредованное взаимодействие между парой ВО р и q существует тогда, когда между вершинами графа взаимодействия, соответствующими объектам р и q, существует хотя бы один путь, на любом пути между этими вершинами есть хотя бы одно ребро, отображающее возможное непосредственное взаимодействие пар ВО, каждый путь между этими вершинами включает в себя более одного ребра.
Достоверное опосредованное взаимодействие между вершинами графа взаимодействия, соответствующими объектам р и q, существует тогда, когда между этими вершинами графа существует хотя бы один путь, все ребра которого отображают достоверное непосредственное взаимодействие пар ВО, и каждый такой путь включает в себя более одного ребра.
В отличие от прототипа выделяют два вида групп ВО: возможные группы и достоверные группы.
Возможной группой называется такой набор ВО, в котором имеется хотя бы одна пара ВО, которые находятся в отношении возможного непосредственного взаимодействия, но при этом не находятся в состоянии достоверного опосредованного взаимодействия.
Достоверной группой называется такой набор ВО, в котором любая пара объектов находится в отношении достоверного непосредственного или достоверного опосредованного взаимодействия.
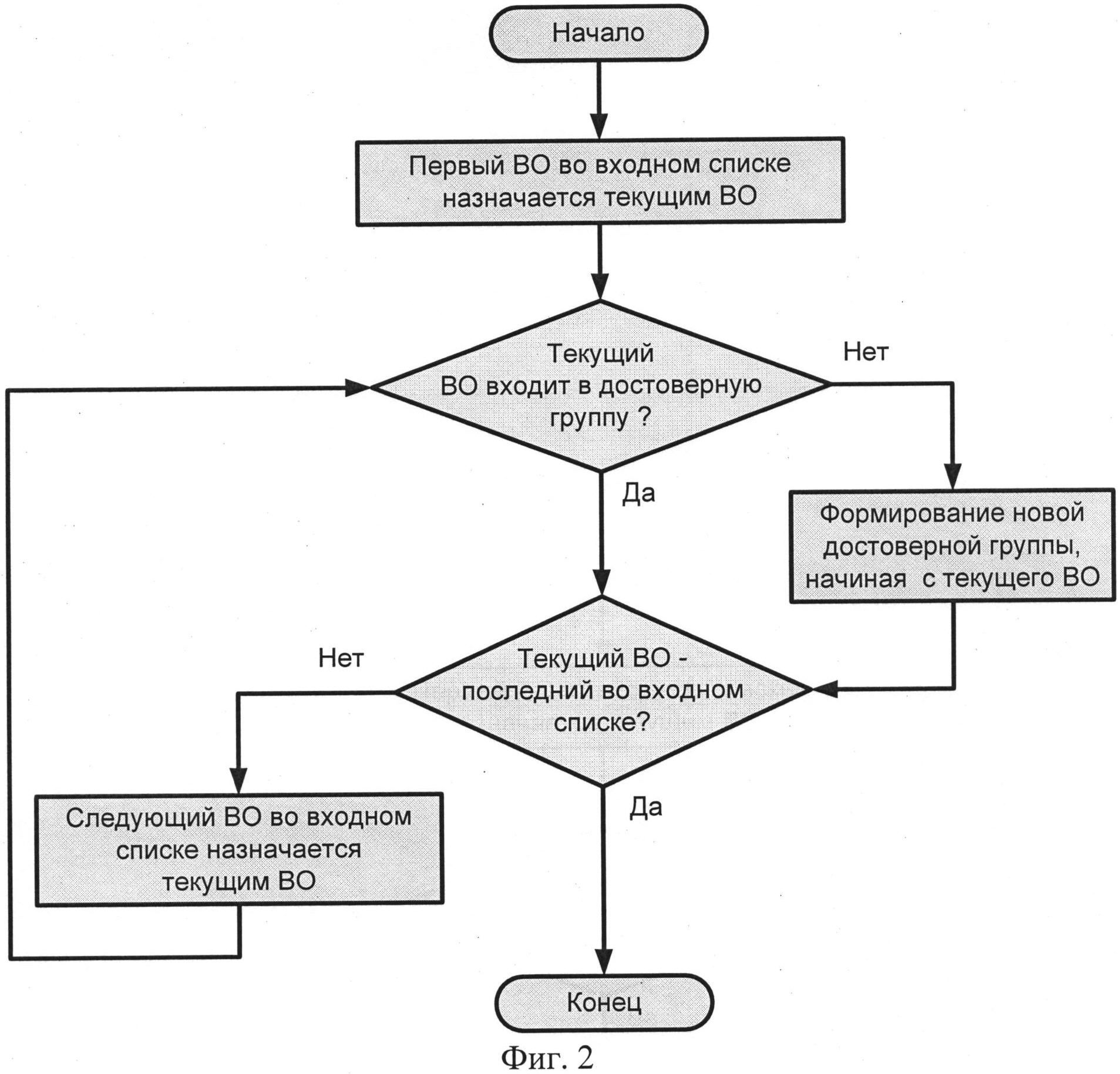
Для выявления достоверных и возможных групп ВО в отличие от прототипа предлагается модифицированный алгоритм обхода графа в глубину, схема которого представлена на фиг.2.
На вход алгоритма подается список ВО с их порядковыми номерами и интервальными значениями КС.
Первый ВО из входного списка назначается текущим ВО. Если текущий ВО не включен в какую-либо достоверную группу, то запускается рекурсивная процедура формирования новой достоверной группы, схема которой приведена на фиг.3. Первым в данную группу включается текущий ВО. По завершении процедуры формирования группы или в случае, если текущий ВО уже был включен в какую-либо группу, проверяется, не является ли текущий ВО последним во входном списке. Если это так, то работа алгоритма завершается. В противном случае следующий ВО из входного списка назначается текущим ВО, и для него повторяется описанная процедура.
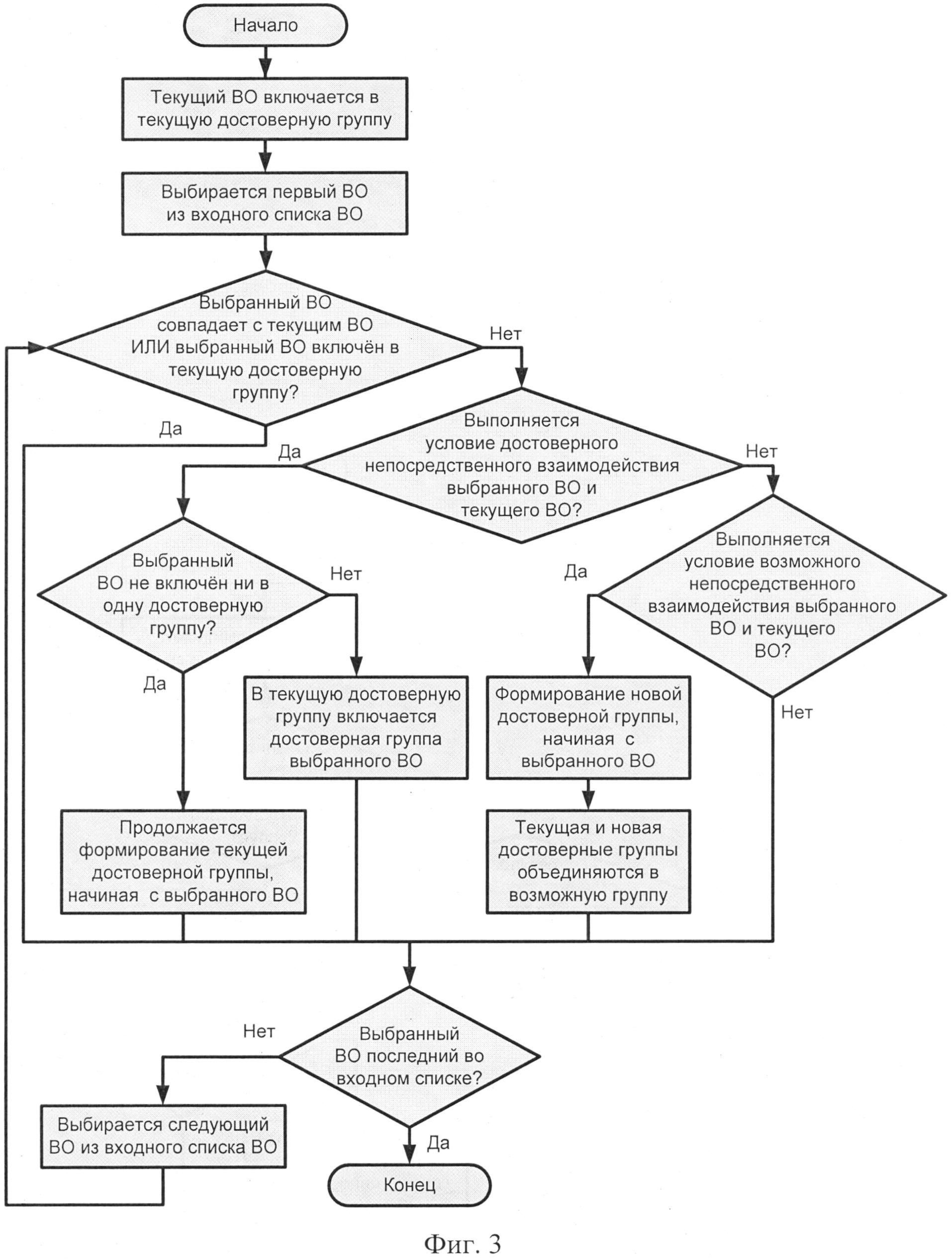
На вход рекурсивной процедуры формирования группы ВО, представленной на фиг.3, подается номер текущей формируемой достоверной группы и текущий несгруппированный ВО.
В ходе выполнения рекурсивной процедуры формирования группы пары ВО проверяются на наличие непосредственного взаимодействия. При этом формируются достоверные группы, которые при выполнении условий непосредственного возможного взаимодействия для пар ВО из разных достоверных групп объединяются в возможные группы ВО. Если обнаруживается, что для пары ВО, которые ранее были включены в одну возможную группу, выполняется условие непосредственного достоверного взаимодействия, то возможная группа ВО преобразуется в достоверную.
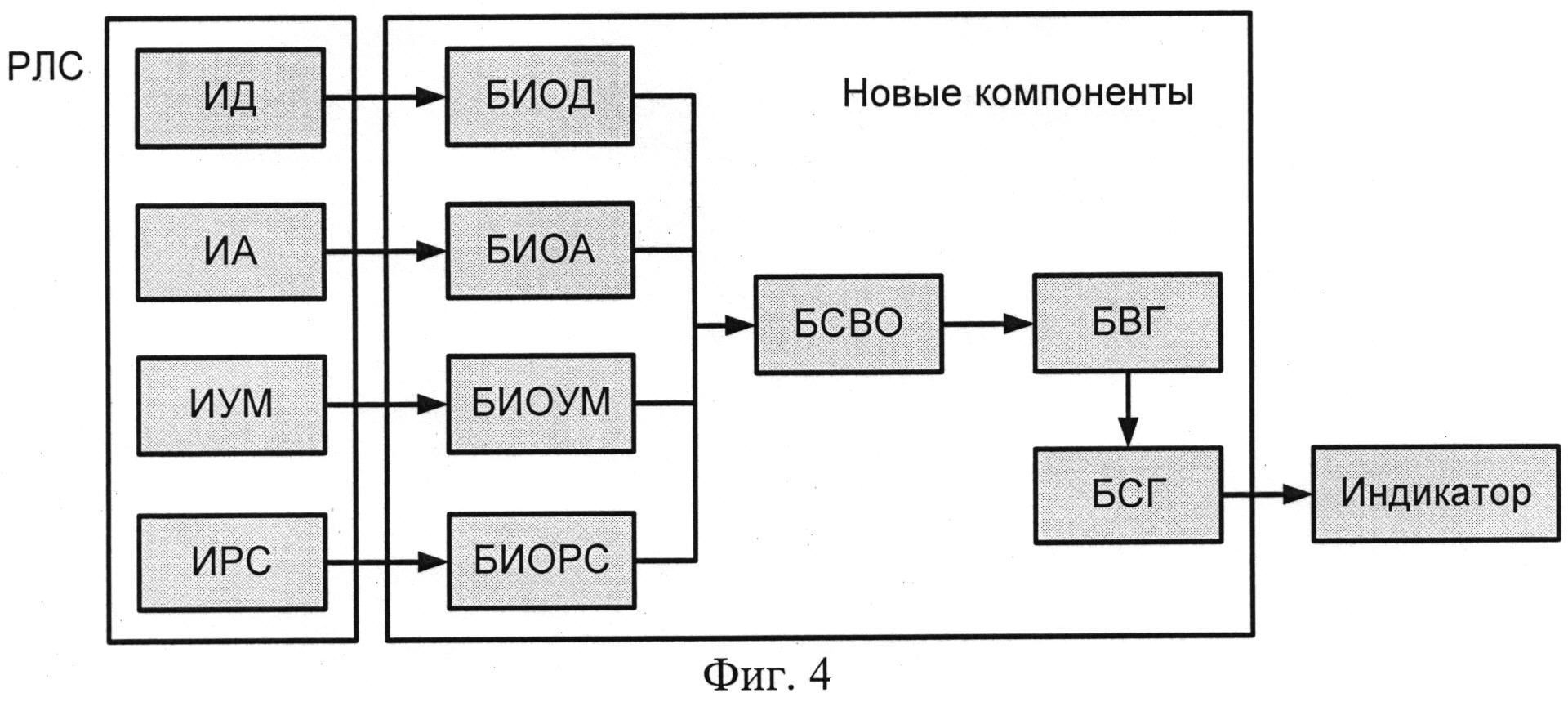
Для реализации предлагаемого способа автоматизированного выявления компактных групп взаимодействующих ВО с учетом неопределенности значений их КС используется типовая РЛС [11], обобщенная функциональная схема которой показана на фиг.4. РЛС включает в себя измеритель дальности (ИД), измеритель азимута (ИА), измеритель угла места (ИУМ) и измеритель радиальной скорости (ИРС), которые осуществляют измерение наклонных дальностей до ВО, их азимутов, углов места и радиальных скоростей соответственно. По сравнению с типовой РЛС добавлены: блок формирования интервальной оценки наклонной дальности до ВО (БИОД), блок формирования интервальной оценки азимута ВО (БИОА), блок формирования интервальной оценки угла места ВО (БИОУМ) и блок формирования интервальной оценки радиальной скорости ВО (БИОРС), в которые из ИД, ИА, ИУМ и ИРС поступают измеренные значения дальности до ВО  , азимута
, азимута  , угла места
, угла места  и радиальной скорости ВО
и радиальной скорости ВО  соответственно. БИОД, БИОА, БИОУМ, БИОРС с учетом полученных оценок КС ВО и их известных СКО формируют интервальные оценки дальности до ВО
соответственно. БИОД, БИОА, БИОУМ, БИОРС с учетом полученных оценок КС ВО и их известных СКО формируют интервальные оценки дальности до ВО  , азимута ВО
, азимута ВО  , угла места ВО
, угла места ВО  и радиальной скорости ВО
и радиальной скорости ВО  по формулам (2) соответственно. Интервальные оценки КС ВО поступают в блок формирования списка ВО (БСВО), который составляет список ВО, присваивает им уникальные номера и передает список блоку выявления групп ВО (БВГ). БВГ выполняет процедуру выявления достоверных и возможных групп ВО и приписывает ВО номера достоверных и возможных групп, в которые они входят. БВГ передает информацию о выявленных группах ВО в блок сопровождения групп ВО (БСГ). БСГ формирует трассы групп ВО и передает информацию о них в индикатор РЛС. Индикатор выполняет отображение информации о трассах групп ВО для оператора РЛС.
по формулам (2) соответственно. Интервальные оценки КС ВО поступают в блок формирования списка ВО (БСВО), который составляет список ВО, присваивает им уникальные номера и передает список блоку выявления групп ВО (БВГ). БВГ выполняет процедуру выявления достоверных и возможных групп ВО и приписывает ВО номера достоверных и возможных групп, в которые они входят. БВГ передает информацию о выявленных группах ВО в блок сопровождения групп ВО (БСГ). БСГ формирует трассы групп ВО и передает информацию о них в индикатор РЛС. Индикатор выполняет отображение информации о трассах групп ВО для оператора РЛС.
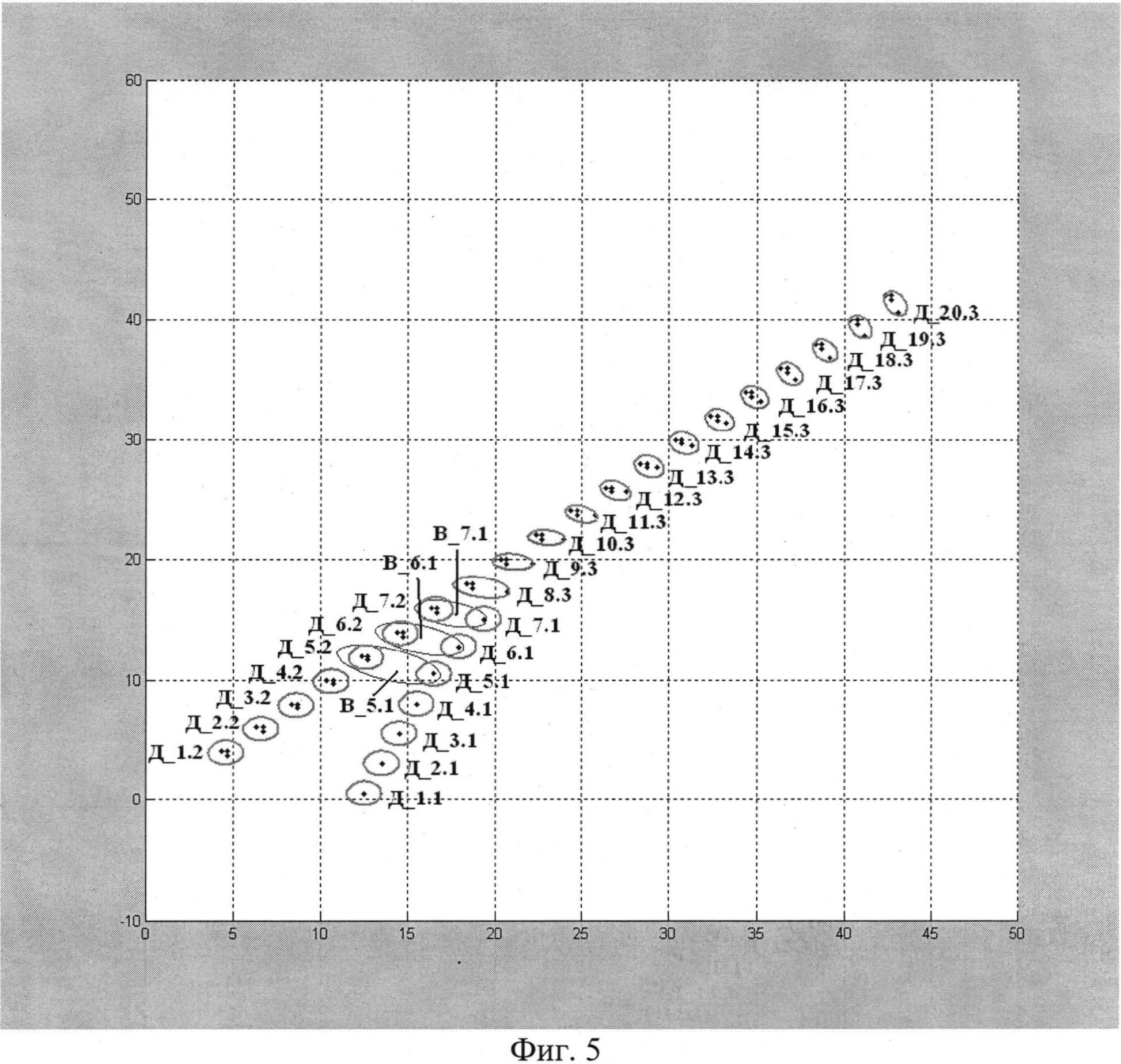
В ходе проведенного компьютерного моделирования исследовалась возможность применения заявленного способа при сопровождении групп ВО. В частности, было смоделировано сопровождение групп ВО в процессе их слияния и разделения. Результаты компьютерного моделирования заявленного способа представлены на фиг.5 и фиг.6. Выявленные достоверные и возможные группы обведены эллипсами. Расстояния по осям координат на фиг.5 и фиг.6 указаны в условных величинах.
На фиг.5 показан пример выявления и сопровождения двух групп ВО в процессе их слияния в одну группу. В данном случае к достоверной группе из трех ВО присоединился одиночный ВО, также считающийся достоверной группой. На фиг.5 достоверные группы ВО обозначены кодами вида «Д_k.i», где k - номер обзора воздушного пространства, на котором выявлена данная группа, а i - уникальный номер среди достоверных групп, присвоенный ей в процессе сопровождения. Возможные группы обозначены кодами вида «B_k.i», где k - номер обзора воздушного пространства, на котором выявлена данная группа, а i - уникальный номер среди возможных групп, присвоенный ей в процессе сопровождения.
На фиг.5 видно, что в процессе сопровождения четырех ВО по данным обзоров 1-7 выявлялись и сопровождались достоверная группа 1, состоящая из одного ВО (коды группы Д_1.1-Д_7.1), и достоверная группа 2, состоящая из трех ВО (коды группы Д_1.2-Д_7.2). По данным обзоров 5-7 было обнаружено слияние достоверных групп 1 и 2 в новую возможную группу с номером 1 (коды группы В_5.1-В_7.1). В процессе дальнейшего сближения ВО из достоверных групп 1 и 2 (возможной группы 1) по данным обзора 8 было выявлено их слияние в новую достоверную группу Д_8.3. В дальнейшем эта группа сопровождалась как одна достоверная группа (коды группы Д_9.3-Д_20.3), а достоверные группы 1 и 2 были сняты с сопровождения.
Приведенный пример показывает, что сопровождение групп ВО с использованием заявленного способа их выявления позволяет обнаруживать объединение групп ВО вначале по возможному критерию, а затем по достоверному. Благодаря этому, достигается возможность более раннего по сравнению с прототипом обнаружения объединения ВО в группы.
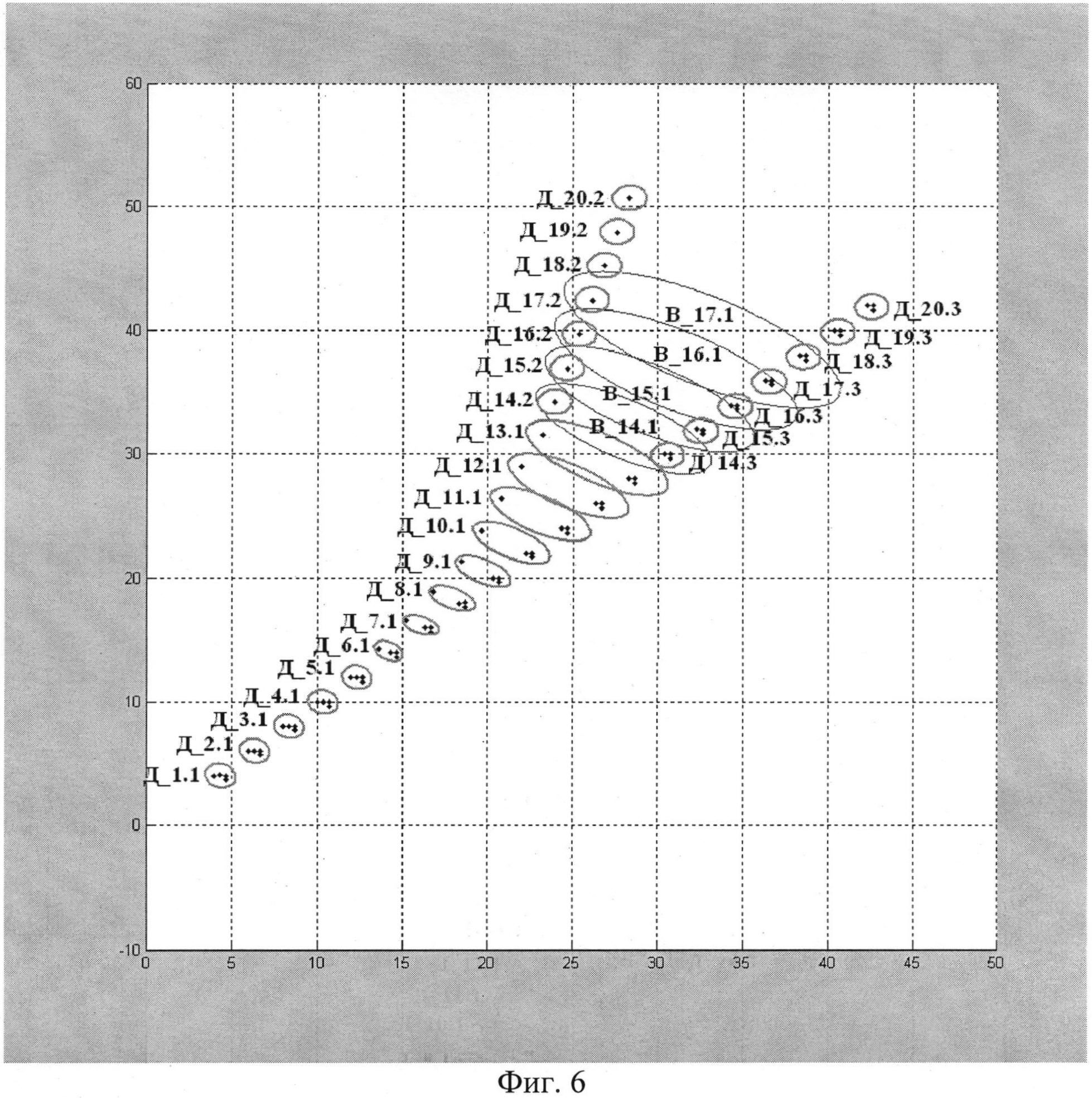
На фиг.6 представлен пример сопровождения группы ВО в процессе отделения одного ВО от группы. Обозначения групп ВО аналогичны тем, что использованы на фиг.5.
Как показано на фиг.6, по данным обзоров 1-13 выявлялась и сопровождалась достоверная группа ВО 1 (коды группы Д_1.1-Д_13.1), состоящая из четырех ВО. Однако в процессе сопровождения один из объектов постепенно отдалялся от трех других, в результате чего на обзоре 14 было обнаружено разделение достоверной группы 1 по достоверному критерию. Были выделены новые достоверные группы 2 (1 ВО) и 3 (3 ВО) (коды Д_14.2, Д_14.3), которые образовали возможную группу 1 (код В_14.1). Достоверная группа 1 была снята с сопровождения, однако все входившие в нее объекты продолжали сопровождаться как возможная группа 1.
В ходе сопровождения ВО на обзорах 14-17 наблюдалось дальнейшее расхождение достоверных групп 2 и 3 (коды групп Д_14.2-Д_17.2 и Д_14.3-Д_17.3 соответственно), при этом продолжалось сопровождение возможной группы 1 (коды группы В_14.1-В_17.1). На обзоре 18 был обнаружен распад возможной группы 1 и она была снята с сопровождения. В дальнейшем по данным обзоров 18-20 выявлялись и сопровождались достоверные группы 2 и 3 (коды групп Д_18.2-Д_20.2 и Д_18.3-Д_20.3 соответственно).
То обстоятельство, что после разделения группы ВО по достоверному критерию она в течение некоторого времени продолжает сопровождаться как возможная группа, позволяет не допустить преждевременного снятия групп с сопровождения в результате кратковременного расхождения ВО или случайных изменений оценок их КС.
Поскольку с точки зрения тактики группы взаимодействующих ВО представляют наибольшую опасность, то возможность увеличения времени их сопровождения за счет более раннего выявления и предотвращения преждевременного снятия с сопровождения является существенным преимуществом заявленного способа по сравнению с прототипом.
Кроме того, заявленный способ в отличие от прототипа позволяет в процессе группирования ВО учитывать в явном виде неопределенность оценок КС ВО и производить оценку степени достоверности принадлежности объектов к выделенным группам. Благодаря этому появляется возможность снизить нагрузку на операторов РЛС за счет автоматизации группирования ВО, сократить объем информации о воздушной обстановке, отображаемой для операторов РЛС и обрабатываемой в РЛС, предоставлять операторам и ЛПР информацию о степени достоверности результатов группирования с учетом неопределенности КС ВО.
Литература
1. Канащенков А.И., Меркулов В.И., Самарин О.Ф. Облик перспективных бортовых радиолокационных систем. Возможности и ограничения. - М.: ИПРЖР, 2002.
2. Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. - М.: Радио и связь. 1993.
3. Верба B.C., Меркулов В.И., Дрогалин В.В. и др. Оценивание дальности и скорости в радиолокационных системах. Ч.3. / Под. ред. B.C. Вербы и В.И. Меркулова - М.: Радиотехника, 2010. - 427 с.
4. Горощенко Л.Б. Методы координированного наведения и атаки несколькими истребителями группы самолетов противника. // Полет. - 2000, №6. С.32-36.
5. Кирсанов А.П., Сорвенков О.С., Сузанский Д.Н. Методы обработки радиолокационной информации при сопровождении компактных групп воздушных объектов // Радиотехника. - 1996, №10. С.102-108.
6. Татт У. Теория графов: Пер. с англ. - М.: Мир, 1988. - 424 с.
7. Федосов Е.А. Авиация ВВС России и научно-технический прогресс. Боевые комплексы и системы вчера, сегодня, завтра. - М.: Дрофа, 2005.
8. Ахо А., Хопкрофт Дж., Ульман Дж. Построение и анализ вычислительных алгоритмов: Пер. с англ. - М.: Мир, 1979. - 536 с.
9. Алефельд Г., Херцбергер Ю. Введение в интервальные вычисления: Пер. с англ. - М.: Мир, 1987. - 360 с.
10. Нариньяни А.С. Недоопределенность в системе представления и обработки знаний // Изв. АН СССР. Техн. кибернетика, 1986. №5. - С.3-28.
11. Авиационные радиолокационные комплексы и системы: учебник для слушателей и курсантов ВУЗов ВВС/ П.И. Дудник, Г.С. Кондратенков, Б.Г. Татарский, А.Р. Ильчук, А.А. Герасимов. Под ред. П.И. Дудника. - М.: Изд. ВВИА им. проф. Н.Е. Жуковского, 2006. - 1112 с.











Способ совместного арифметического и помехоустойчивого кодирования
Система электропитания импульсного усилителя мощности
Сканирующая многочастотная антенная решетка для формирования в пространстве последовательности сверхширокополосных импульсных сигналов с управляемой частотой повторения импульсов
Способ изготовления резистора на кристаллической или поликристаллической подложке
Блокинг-генератор для работы в режиме автогенератора
Система управления в продольном канале пилотируемых и беспилотных летательных аппаратов в режиме увода с опасной высоты при работе по наземным объектам
Способ изготовления устройства энергонезависимого шифрования многопотокового оптического сигнала в каналах передачи информации
Устройство формирования и излучения мощных радиоимпульсов
Система автоматизированного модального управления в продольном канале летательных аппаратов
Дистанционная резервированная система автоматизированного модального управления в продольном канале маневренных пилотируемых и беспилотных летательных аппаратов
Квазиоптимальный гребенчатый фильтр для последовательности широкополосных и сверхширокополосных когерентных радиоимпульсов со сжатием спектра сигнала
Способ совместного арифметического и помехоустойчивого кодирования
Система электропитания импульсного усилителя мощности
Сканирующая многочастотная антенная решетка для формирования в пространстве последовательности сверхширокополосных импульсных сигналов с управляемой частотой повторения импульсов
Способ изготовления резистора на кристаллической или поликристаллической подложке
Блокинг-генератор для работы в режиме автогенератора
Система управления в продольном канале пилотируемых и беспилотных летательных аппаратов в режиме увода с опасной высоты при работе по наземным объектам
Способ изготовления устройства энергонезависимого шифрования многопотокового оптического сигнала в каналах передачи информации
Устройство формирования и излучения мощных радиоимпульсов
Система автоматизированного модального управления в продольном канале летательных аппаратов

