Результат интеллектуальной деятельности: СПОСОБ ИНДИКАЦИИ ЛЕТЧИКУ О ПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ЗАДАННОЙ ГЛИССАДЫ ПРИ ЗАХОДЕ НА ПОСАДКУ НА КОРАБЛЬ
Вид РИД
Изобретение
Изобретение относится к области приборного оборудования летательных аппаратов (ЛА) и исследований устойчивости, управляемости и динамики посадки самолетов и может быть использовано для повышения безопасности полета ЛА при посадке на малоразмерные взлетно-посадочные полосы (ВПП), корабль или плавучую платформу.
Одним из способов ручной посадки на корабль является управление ЛА по сигналам визуальных оптических систем посадки. Для обеспечения посадки на авианесущие корабли в США разработаны визуальные системы посадки, которые обеспечивают летчика информацией о положении ЛА в вертикальной и горизонтальной плоскостях относительно заданной глиссады. Эти системы визуальной посадки имеют различные зоны действия по удалению до корабля.
В ближней зоне (на удалении от 0 до 0,75…1,25 морских миль) используются хорошо зарекомендовавшие себя оптические системы посадки (ОСП) типа FLOLS (Improved Fresnel Lens Optical Landing System) или IFLOLS (Improved Fresnel Lens Optical Landing System). На большом удалении сигнал ОСП различим плохо. В дальней зоне (на удалении от 4 до 10 морских миль) применяются системы LGI (Laser Glideslope Indicator), которая обеспечивает летчика цветовой информацией о положении самолета в вертикальной плоскости, и LCL (Laser Centerline Localizer), которая обеспечивает летчика цветовой информацией о положении самолета в горизонтальной плоскости. В средней зоне (на удалении от 0,75…1,25 до 4 морских миль) предлагаются системы Fore & Aft (Laser Glideslope Indicator), которая обеспечивает летчика цветовой информацией о положении самолета в вертикальной плоскости, и система CrossBar, которая обеспечивает летчика цветовой и позиционной информацией о положении самолета в горизонтальной плоскости. (1. Navy Test Lasers To Help Carrier Pilots, Bruce D. Nordwall/Naval Air Engineering Center, Lakehurt, NJ, 2. Beyond the lens, By Commander Frank G. Pfeiffer, US Navy).
На российском корабле используется оптическая система посадки «Луна-3», которая включает как позиционный принцип индикации, так и цветовой и обеспечивает летчика информацией о положении самолета в вертикальной плоскости. Эта система обеспечивает ручную посадку самолета с расстояния 2000…2500 м.
В ближней зоне летчик оценивает свое положение в горизонтальной плоскости по видимой конфигурации положения осевой линии посадочной палубы и вертикальной линии, расположенной на кормовом срезе корабля. Этот принцип индикации бокового отклонения самолета от заданной глиссады применяется как при посадке на зарубежные, так и на отечественные авианесущие корабли. В отечественной палубной авиации визуальные системы, обеспечивающие летчика информацией о его положении относительно заданной глиссады на удалении более 2000…2500 м, отсутствуют. Летчик ориентируется либо по навигационным системам, либо по речевым сигналам руководителя визуальной посадки.
К недостаткам приведенных зарубежных систем, действующих на удалении более 2000 м, можно отнести наличие только цветовой кодировки сигнала, необходимость переориентации летчика с цветовой кодировки на позиционно-цветовую кодировку ОСП типа IFOLS при приближении к кораблю.
В последнее время уделяется много внимания отображению ВПП на экране индикатора на лобовом стекле (ИЛС) с использованием средств глобального позиционирования объектов (GPS, ГЛОНАСС и др.).
Известен, принятый за прототип, способ отображения на экране индикатора на лобовом стекле (HUD - head-up-display) внешней обстановки, который в зарубежной литературе имеет обозначение SVS (Synthetic Vision System), (см. NASA Technical Reports Server (NTRS) Added to NTRS: 2007-06-08, Document ID: 20070018289 Author(s): Lawrence J. Prinzel III., Lynda J. Kramer, and Randall E. Bailey, NASA Langley Research Center, Hampton, VA, Going Below Minimums: The Efficacy Of Display Enhanced/Synthetic Vision Fusion for Go-Around Decisions During Non-Normal Operations). Этот способ индикации предназначен для обеспечения летчика информацией о его положении относительно ВПП и посадочной глиссады и других объектов в условиях плохой видимости и основан на формировании изображения этих объектов на HUD (т.е. на ИЛСе) или другом пилотажном индикаторе с помощью бортовой вычислительной машины (БЦВМ) и совмещаемого в пространстве с реальной ВПП на основе информации, получаемой от систем измерения координат самолета и аэродромной ВПП, например, спутниковой системы глобального позиционирования (GPS). Недостатком такой системы индикации внешней обстановки является сложность восприятия летчиком изображения на значительном удалении самолета таких объектов, как корабль и оптическая система посадки и формирования на их основе управляющих действий.
Задачей изобретения является создание способа индикации летчику о положении ЛА относительно заданной глиссады при заходе на посадку на корабль, обеспечивающего летчика на ИЛС информацией о положении ЛА относительно посадочной глиссады на удалении самолета от корабля, существенно превышающем дальность различимости стандартных визуальных систем посадки и самой ВПП или корабля. При этом информация летчику на ИЛС идентична информации стандартных визуальных систем посадки, расположенных на ВПП или корабле, и наблюдаемых летчиком на удалении менее одного километра.
Техническим результатом является повышение безопасности посадки на малоразмерную ВПП или корабль, обеспечение захода ЛА в зону видимости сигнала стандартных визуальных корабельных систем посадки, обеспечение посадки в сложных метеоусловиях при плохой видимости малоразмерной ВПП или корабля и стандартных визуальных систем посадки, разработка информационного кадра ИЛС или МФИ при посадке на малоразмерную ВПП или корабль.
Задача и технический результат достигаются тем, что в способе индикации летчику о положении летательного аппарата относительно заданной глиссады при заходе на посадку на корабль, основанном на определении положения летательного аппарата и корабля с помощью глобальной или корабельной локальной системы позиционирования и формировании на индикаторе на лобовом стекле или многофункциональном индикаторе виртуальных корабля и оптической системы посадки, на основе изображений которых летчик осуществляет управление летательным аппаратом путем перемещения рычагов управления и выводит летательный аппарат в зону наблюдаемости штатной реальной оптической системы посадки, с помощью бортовой цифровой вычислительной машины определяют взаимное положение летательного аппарата и корабля, рассчитывают положение виртуального корабля, увеличивают его в размерах по сравнению с реальным кораблем, рассчитывают сигнал оптической системы посадки относительно реального корабля, формируют увеличенные изображения виртуального корабля и виртуальной оптической системы посадки и отображают их на индикаторе на лобовом стекле или многофункциональном индикаторе в кабине летательного аппарата, летчик четко определяет отклонение летательного аппарата по высоте относительно глиссады и боковое отклонение относительно оси посадочной палубы и осуществляет управление летательным аппаратом точно так, как это он делает на близком расстоянии от корабля, при этом коэффициент увеличения размера виртуального корабля и оптической системы посадки задают в виде функции дальности до корабля и летчик на любом удалении от корабля при необходимости регулирует коэффициент увеличения размера виртуального корабля и на всем протяжении захода на посадку и при посадке летчик имеет однотипную индикацию для обеспечения стереотипа управления летательным аппаратом.
Перечень фигур на чертежах.
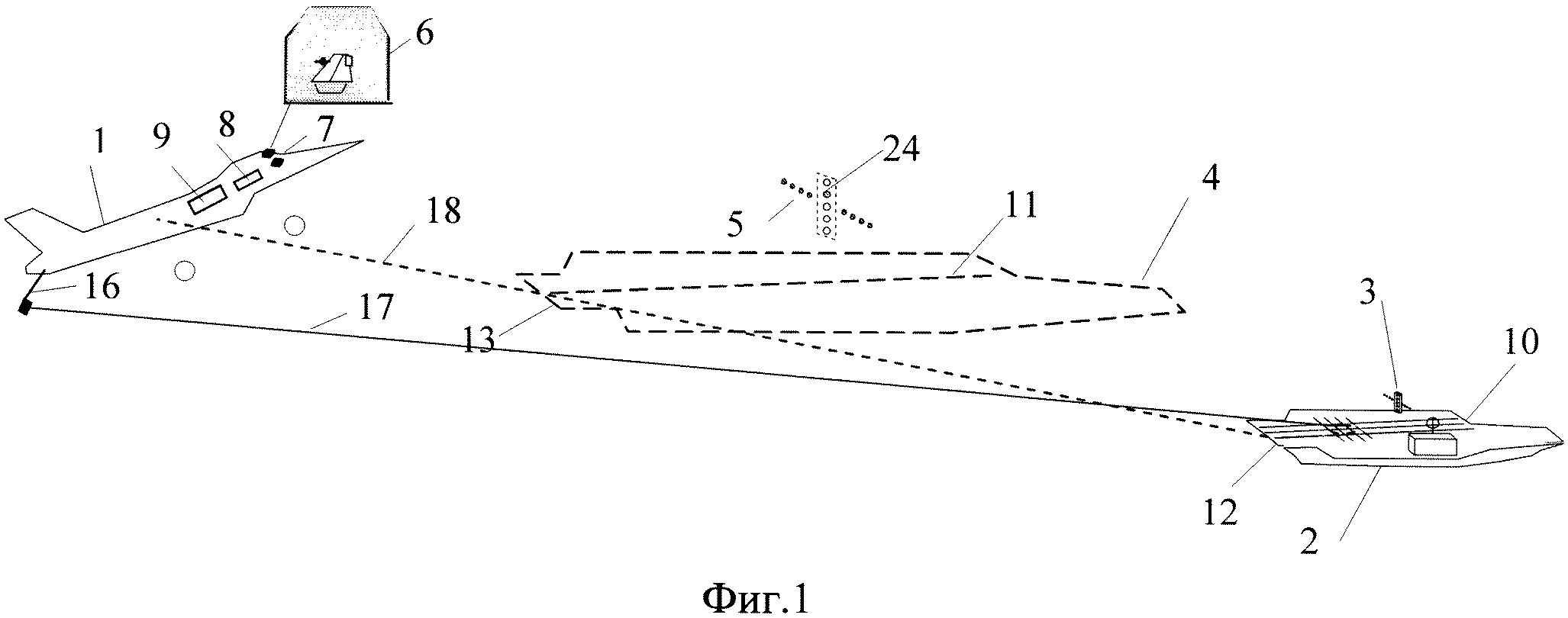
На фиг. 1 проиллюстрирована схема реализации способа индикации летчику о положении самолета относительно заданной глиссады при заходе на посадку на корабль.
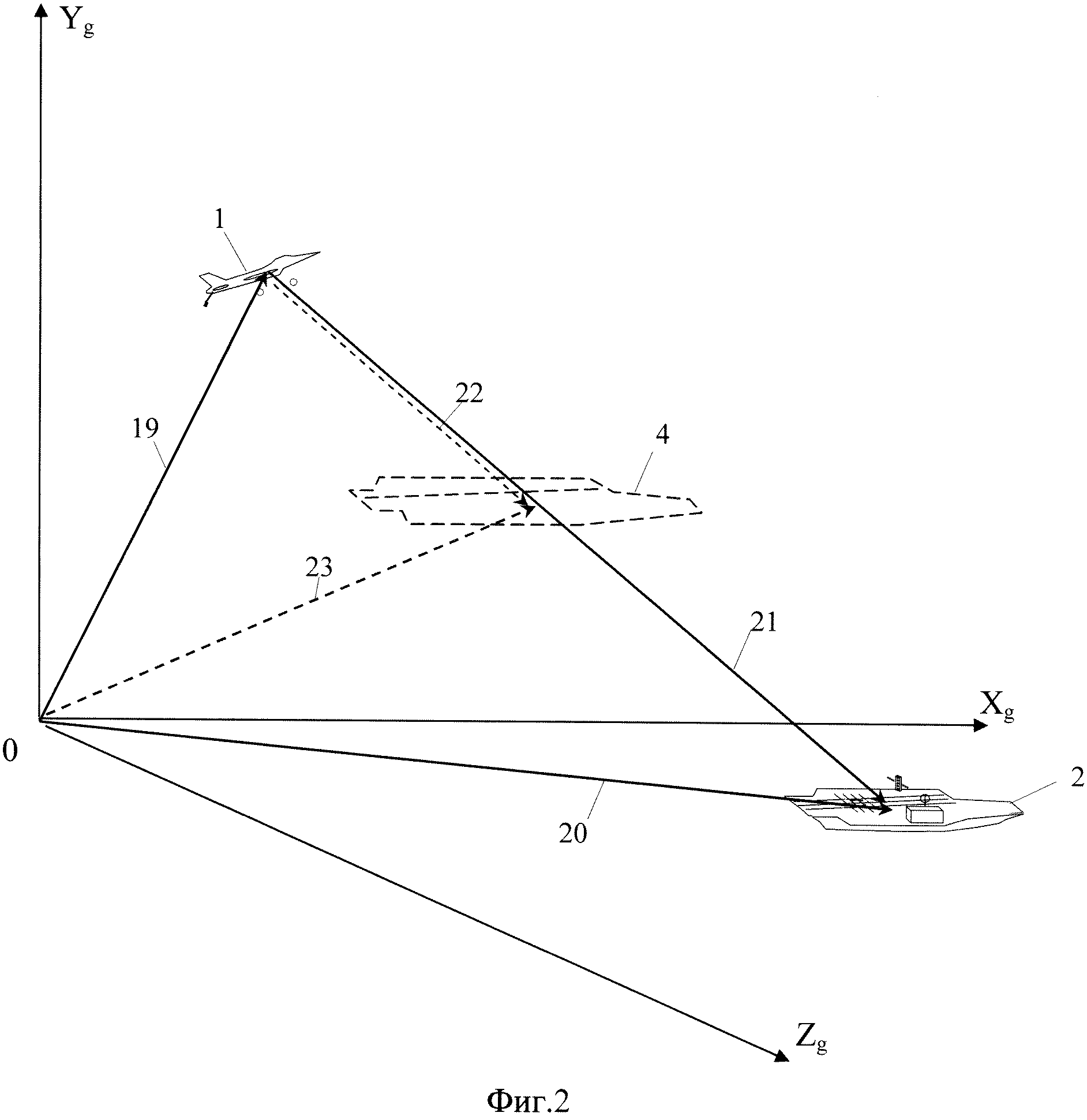
На фиг. 2 показана схема расчета положения виртуального корабля относительно ЛА и реального корабля.
На фиг. 3 показан вид на экране ИЛС при посадке ЛА при индикации виртуальных корабля и оптической системы посадки на фоне реального корабля при боковом отклонении ЛА относительно оси посадочной палубы.
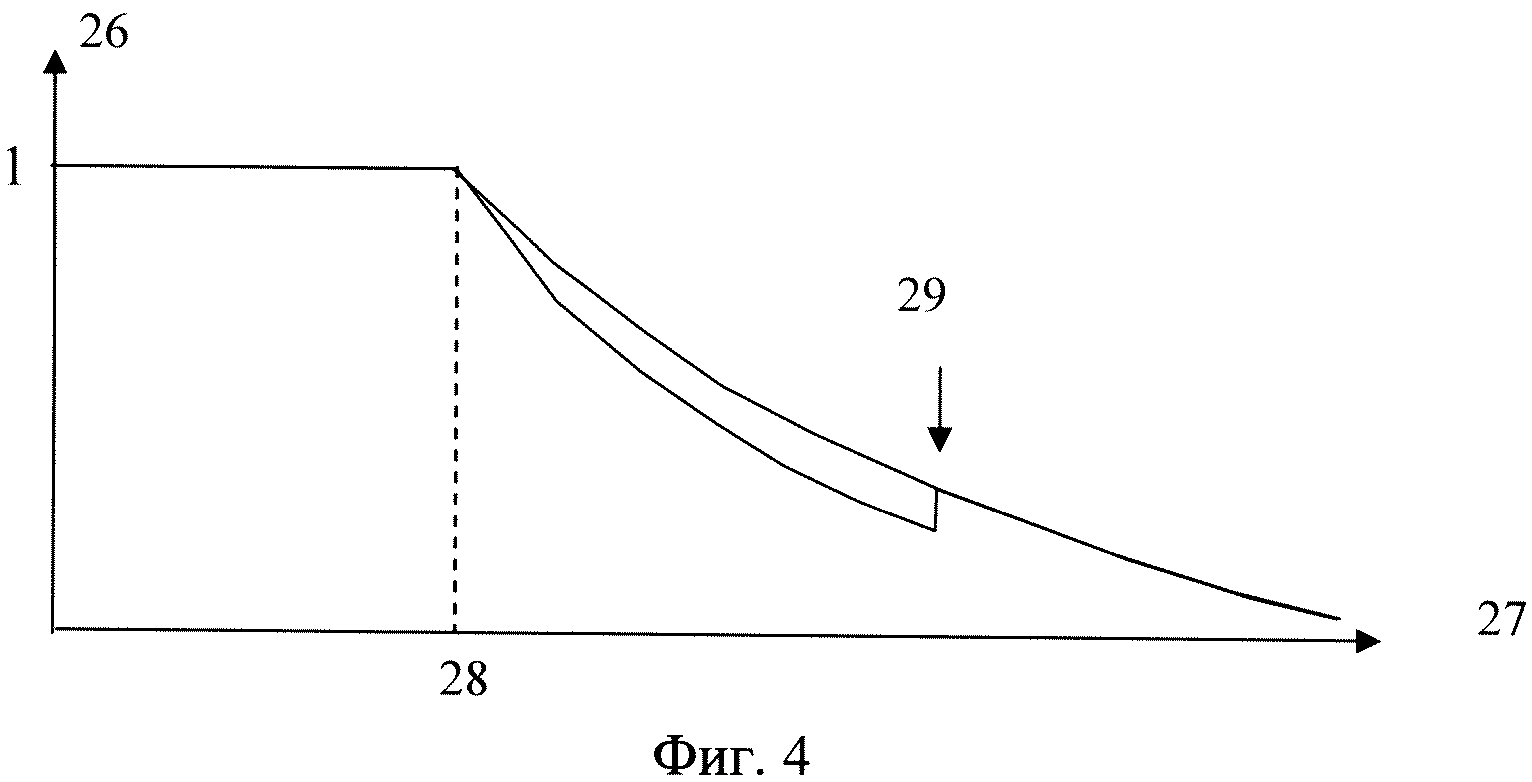
На фиг. 4 показан вид изменения коэффициента увеличения размера виртуального корабля и оптической системы посадки в виде функции от удаления ЛА от реального корабля.
На фигурах обозначены:
1 - ЛА,
2 - корабль,
3 - оптическая система посадки,
4 - виртуальный корабль,
5 - виртуальная оптическая система посадки,
6 - индикатор на лобовом стекле,
7 - многофункциональный индикатор,
8 - бортовая цифровая вычислительная машина,
9 - приемник спутника навигационной системы,
10 - ось посадочной палубы корабля,
11 - ось посадочной палубы виртуального корабля,
12 - горизонтальная кормовая линия корабля,
13 - горизонтальная кормовая линия виртуального корабля,
14 - вертикальная кормовая линия корабля,
15 - вертикальная кормовая линия виртуального корабля,
16 - тормозной гак,
17 - глиссада тормозного гака,
18 - линия привязки виртуального корабля, на которой располагается самолет, некоторая заданная точка на корабле и соответствующая ей точка виртуального корабля,
19 - вектор положения самолета относительно земной системы координат,
20 - вектор положения корабля относительно земной системы координат,
21 - вектор положения корабля относительно самолета,
22 - вектор положения виртуального корабля относительно самолета,
23 - вектор положения виртуального корабля относительно земной системы координат,
24 - сигнал виртуальной оптической системы посадки,
25 - изображение виртуального следа за кораблем.
26 - коэффициент увеличения размера виртуального корабля,
27 - удаление самолета от реального корабля,
28 - удаление самолета от реального корабля, менее которого виртуальный корабль совпадает с реальным кораблем,
29 - коррекция летчиком коэффициента увеличения размера виртуальных корабля и оптической системы посадки путем перемещения переключателя в кабине самолета.
Способ осуществляется следующим образом.
При выполнении захода на посадку на корабль 2 на удалении от корабля более 1…2 км при плохой различимости сигнала оптической системы посадки 3 и видимости разметки на палубе корабля (оси посадочной палубы 10, горизонтальной кормовой линии корабля 12 и вертикальной кормовой линии корабля 14) летчик включает режим работы навигационной системы, который соответствует выполнению режима захода на посадку и посадки. При появлении на индикаторе на лобовом стекле 6 или многофункциональном индикаторе 7 изображения виртуального корабля 4 и виртуальной оптической системы посадки 5, летчик определяет положение ЛА относительно заданной траектории посадки по сигналу 24 виртуальной оптической системы посадки 4, который соответствует сигналу оптической системы посадки 3, установленной на корабле 2. Боковое отклонение ЛА от оси посадочной палубы корабля 10 летчик определяет по взаимному положению оси 11, кормовой горизонтальной линии 13 и вертикальной линии 15 виртуального корабля. На основании сигнала 24 и бокового отклонения относительно оси посадочной палубы корабля 10 летчик формирует управляющие отклонения рычагов управления самолетом. При недостаточном или чрезмерном увеличении виртуального корабля 4 и виртуальной оптической системы посадки 5 по отношению к кораблю 2 и его оптической системы посадки 3 летчик регулирует 29 коэффициент увеличения размера виртуального корабля 26 путем перемещения переключателя в кабине ЛА. При приближении к кораблю на расстояние четкой видимости корабля 2 и оптической системы посадки 3 и ее сигнала летчик выключает индикацию виртуального корабля 4 и виртуальной системы посадки 5 на индикаторе на лобовом стекле 6. Далее летчик управляет ЛА по сигналу штатной оптической системы посадки 3 и наблюдаемой разметке посадочной палубы корабля 2.
При этом ось посадочной палубы виртуального корабля 11 параллельна оси посадочной палубы реального корабля 10, горизонтальная кормовая линия виртуального корабля 13 параллельна горизонтальной кормовой линии реального корабля 12, вертикальная кормовая линия виртуального корабля 15 параллельна вертикальной кормовой линии реального корабля 14. В соответствии с этим летчик может определить боковое отклонение ЛА относительно оси посадочной реального корабля по взаимному положению оси посадочной палубы 11 и вертикальной кормовой линии виртуального корабля 15, аналогично тому, как он это делает при оценке бокового отклонения самолета по взаимному положению оси посадочной палубы 10 и вертикальной кормовой линии 12 при близком расстоянии самолета относительно реального корабля 2.
При реализации предлагаемого способа летчик формирует управляющие действия ручкой ЛА по тангажу, наблюдая сигнал 24 виртуальной оптической системы посадки 5, совпадающий с сигналом реальной оптической системы посадки 3, а управление ручкой по крену и педалями формирует по наблюдаемому виду разметки виртуального корабля 4 на основе наблюдаемых им изображений виртуальных корабля 4 и оптической системы посадки 5 на пилотажном индикаторе летчика 6 - индикаторе на лобовом стекле или многофункциональном индикаторе 7. Бортовая цифровая вычислительная машина 8 с учетом векторов положения самолета 19 и корабля 20 в земной системе координат, измеренных глобальной системой позиционирования или корабельной системой позиционирования, качки корабля, углового положения самолета, положения летчика относительно центра масс самолета, положения оптической системы посадки 3 на палубе корабля 2, угла наклона глиссады, закона стабилизации и диаграммы видимости оптической системы посадки обеспечивает расчет сигнала 24 виртуальной оптической системы посадки 5 и его соответствие сигналу реальной оптической системы посадки 3 и создает на экране пилотажного индикатора летчика увеличенные изображения виртуального корабля 4 и виртуальной оптической системы посадки 5 по сравнению с их реальными размерами. Уровень увеличения виртуальных изображений корабля, оптической системы посадки и ее сигнала зависит от коэффициента 26 и может быть изменен летчиком путем введения коррекции 29. На расстоянии около 2 км размер виртуального корабля более чем 5 раз больше размера реального корабля, на расстоянии около 500 м их размеры совпадают.
При расчете положения в пространстве виртуального корабля 4 и виртуальной оптической системы посадки 5 используются следующие алгоритмы:




где
 - вектор положения ЛА относительно земной системы координат 19,
- вектор положения ЛА относительно земной системы координат 19,
 - вектор положения корабля относительно земной системы координат 20,
- вектор положения корабля относительно земной системы координат 20,
 - вектор положения корабля относительно ЛА 21,
- вектор положения корабля относительно ЛА 21,
 - вектор положения виртуального корабля относительно самолета 22,
- вектор положения виртуального корабля относительно самолета 22,
 - вектор положения виртуального корабля относительно земной системы координат 23,
- вектор положения виртуального корабля относительно земной системы координат 23,
λ - коэффициент увеличения размера виртуального корабля 26,
 - удаление ЛА от реального корабля 27,
- удаление ЛА от реального корабля 27,
 - положение точки на реальном корабле или ВПП, к которой осуществляется привязка виртуального корабля.
- положение точки на реальном корабле или ВПП, к которой осуществляется привязка виртуального корабля.
Предлагаемый способ индикации был опробован на пилотажном стенде ЦАГИ ПС-10М путем моделирования захода на посадку и посадки ЛА на палубу корабля с отображением виртуального корабля и его оптической системы посадки на индикаторе на лобовом стекле.
При предлагаемом способе индикации корабля и его визуальных систем посадки обеспечивается выход ЛА в зону видимости сигнала корабельных визуальных систем посадки с большого удаления от корабля или при плохой видимости корабля и его систем визуальной посадки и тем самым обеспечивается повышение безопасности по сравнению с принятыми в настоящее время методами индикации при заходе и посадке на корабль.
Способ индикации летчику о положении летательного аппарата относительно заданной глиссады при заходе на посадку на корабль, основанный на определении положения летательного аппарата и корабля с помощью глобальной или корабельной локальной системы позиционирования и формировании на индикаторе на лобовом стекле или многофункциональном индикаторе виртуальных корабля и оптической системы посадки, на основе изображений которых летчик осуществляет управление летательным аппаратом путем перемещения рычагов управления и выводит летательный аппарат в зону наблюдаемости штатной реальной оптической системы посадки, отличающийся тем, что с помощью бортовой цифровой вычислительной машины определяют взаимное положение летательного аппарата и корабля, рассчитывают положение виртуального корабля, увеличивают его в размерах по сравнению с реальным кораблем, рассчитывают сигнал оптической системы посадки относительно реального корабля, формируют увеличенные изображения виртуального корабля и виртуальной оптической системы посадки и отображают их на индикаторе на лобовом стекле или многофункциональном индикаторе в кабине летательного аппарата, летчик четко определяет отклонение летательного аппарата по высоте относительно глиссады и боковое отклонение относительно оси посадочной палубы и осуществляет управление летательным аппаратом точно так, как это он делает на близком расстоянии от корабля, при этом коэффициент увеличения размера виртуального корабля и оптической системы посадки задают в виде функции дальности до корабля и летчик на любом удалении от корабля при необходимости регулирует коэффициент увеличения размера виртуального корабля и на всем протяжении захода на посадку и при посадке летчик имеет однотипную индикацию для обеспечения стереотипа управления летательным аппаратом.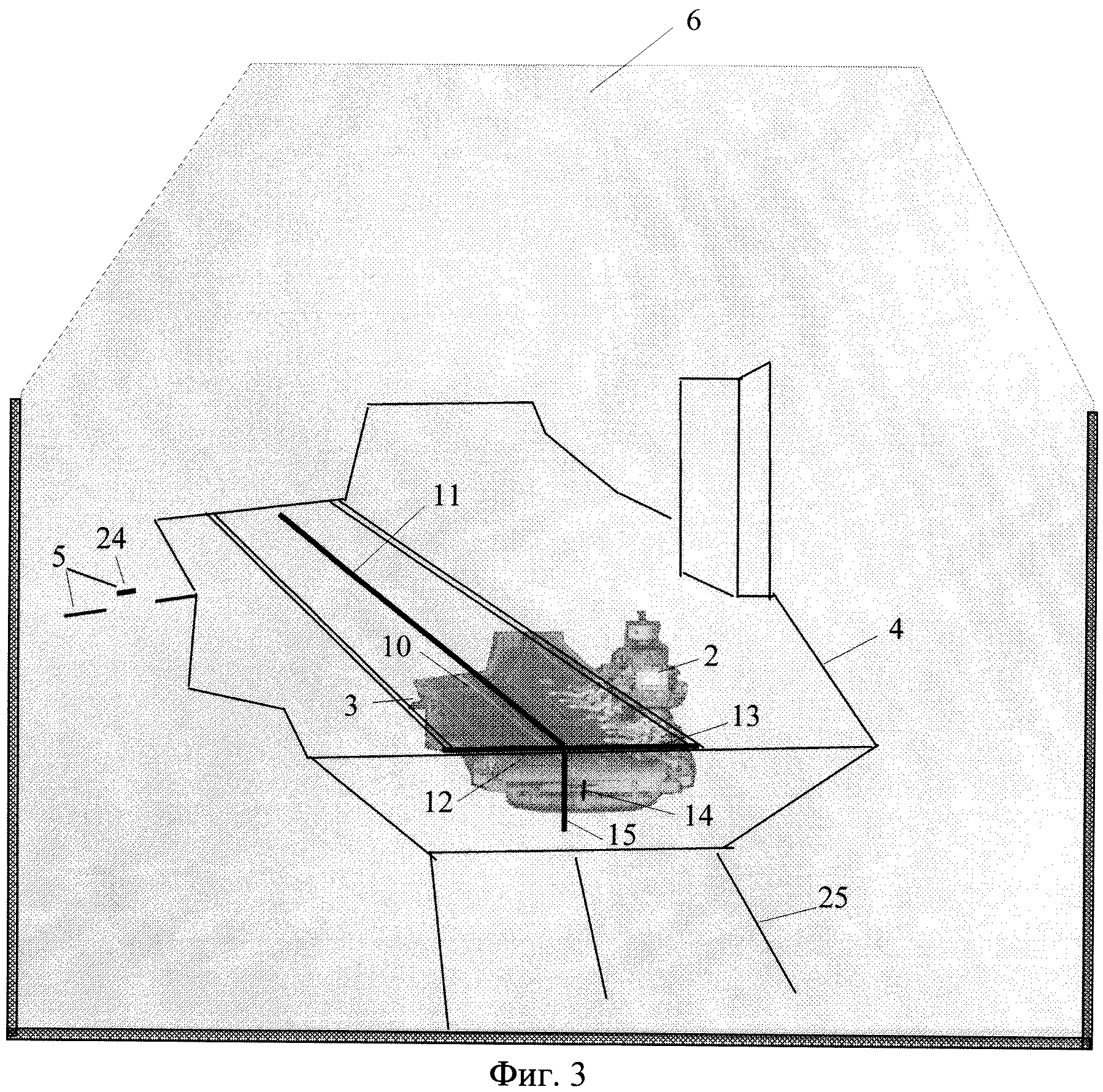
Стенд для измерения стато - динамических характеристик физических объектов
Устройство для контроля подводного плавсредства с самого плавсредства
Способ контроля обледенения жалюзи воздухоприемной решетки
Крупногабаритная воздухоприемная решетка с обогреваемыми жалюзи
Способ защиты воздухозаборных решеток с жалюзи от обледенения и устройство для его осуществления
Способ двухступенчатого преобразования энергии ионизирующего излучения в электрическую энергию
Способ легирования стали
Способ получения пенополиуретанового нанокомпозита
Пьезоэлектрический акселерометр
Лигатура для титановых сплавов
Композиционный наноструктурированный порошок для нанесения покрытий
Способ импульсно-дуговой сварки плавящимся электродом алюминиевых сплавов
Износо-коррозионностойкий медно-никелевый сплав
Движительно-рулевая колонка
Способ термической обработки поковок из высокопрочной коррозионно-стойкой стали мартенситного класса
Устройство активной теплозащиты и модуляции аэродинамического сопротивления гиперзвукового бпла
Способ активной теплозащиты и модуляции аэродинамического сопротивления гиперзвукового летательного аппарата
Состав эпоксиполиуретанового компаунда и способ его получения
Способ получения многослойного материала
Способ получения композиционного плакированного порошка для нанесения покрытий

