Результат интеллектуальной деятельности: СПОСОБ РЫЧАЖНО-ГРАВИТАЦИОННОГО ПОДЪЕМА СПАРЕННЫХ РАБОЧИХ ТЕЛ
Вид РИД
Изобретение
Изобретение относится к области техники гравитационных механизмов и машин, принцип действия которых основан на преобразовании энергии гравитационного поля земли в механическую энергию, и может быть использовано в энергетических установках для подъема рабочего тела гравитационными силами.
Из уровня техники наиболее близким аналогом заявленного изобретения является средство, реализующее способ рычажного подъема рабочего тела, описанный, например, SU 49121 А, опубликовано: 31.08.1936 г. Известный способ основан на том, что рабочее тело, каким является бревно, захватывают двумя шарнирными зажимами с зубьями на концах каждого зажима, одним шарнирным зажимом захватывают комель бревна, а другим шарнирным зажимом захватывают вершину бревна, устанавливают между шарнирными зажимами штангу, оценивают, например, визуально, на штанге центр тяжести рабочего тела, соединяют один конец короткого плеча рычага с выявленной точкой центра тяжести рабочего тела на штанге, а другой конец короткого плеча рычага с поворотной осью устанавливают на вершину неподвижного упора, прикладывают усилие на длинный конец рычага и поворачивают относительно оси неподвижного упора длинный конец рычага, отслеживают моменты отделения концов поднимаемого рабочего тела от неподвижной поверхности, на которой рабочее тело располагалось, фиксируют момент отделения двух концов рабочего тела от неподвижной поверхности, перемещают рычаг с рабочим телом вдоль продольной прорези рычага, во внутри которой расположена поворотная ось неподвижного упора, и опускают рабочее тело, например, в кузов транспортного средства.
Недостаток известного способа рычажного подъема рабочего тела состоит в том, что гравитационная сила может использоваться всего лишь однократно для подъема рабочего тела, что не обеспечивает в полной мере последовательное многократное использование гравитационной энергии для механизированного подъема точки опоры рычага.
Технической задачей изобретения является расширение возможного использования энергии гравитационного поля Земли для механизированного подъема спаренных с помощью Г-образного рычага двух одинаковых по весу грузов под действием сил гравитации.
Технический результат изобретения состоит в том, что повышается производительность рычажного механизма передачи гравитационной энергии от одного рабочего тела к другому рабочему телу, которые связаны между собой Г-образным рычагом и имеют одинаковые массы, с возможностью подъема точки рычажной опоры под действием гравитационной силы Земли.
Сущность изобретения заключается в том, что фиксируют взаимное расположение двух соседних между собой рабочих тел одинакового веса относительно поверхности земли на концах Г-образного рычага с точкой опоры в его середине, смещают точку опоры Г-образного рычага в сторону, противоположную изгибу рычага на расстояние, не превышающее длины его изгиба, фиксируют смещенную точку опоры Г-образного рычага относительно земной поверхности, освобождают зафиксированные рабочие тела для их свободного рычажного поворота под действием гравитационной силы относительно зафиксированной смещенной точки опоры, фиксируют взаимное положение рабочих тел одно выше другого после завершения их рычажного поворота, соединяют с помощью Г-образного рычага с шарнирным изгибом нижнее зафиксированное рабочее тело с верхним зафиксированным рабочим телом по прямой линии, проходящей выше ранее зафиксированной смещенной точки опоры и состоящей из двух отрезков, верхний из которых длиннее нижнего отрезка, с присоединением шарнирного изгиба Г-образного рычага к верхнему рабочему телу, фиксируют второй по порядку раз поднятую точку опоры Г-образного рычага, освобождают зафиксированные рабочие тела для их свободного рычажного поворота под действием гравитационной силы относительно второй по порядку зафиксированной поднятой точки опоры Г-образного рычага, отслеживают угол поворота рабочих тел относительно второй по порядку зафиксированной поднятой точки опоры и в момент горизонтального положения Г-образного рычага устанавливают его шарнирный изгиб под прямым углом, фиксируют взаимное расположение рабочих тел после завершения их рычажного поворота относительно второй по порядку зафиксированной поднятой точки опоры Г-образного рычага, перемещают во встречном горизонтальном направлении друг к другу рабочие тела на расстояние, не превышающее первоначальной длины Г-образного рычага, соединяют с помощью Г-образного рычага с шарнирным изгибом нижнее перемещенное зафиксированное рабочее тело с верхним перемещенным зафиксированным рабочим телом по прямой линии, проходящей выше ранее зафиксированной второй по порядку поднятой точки опоры и состоящей из двух отрезков, верхний из которых длиннее нижнего отрезка, с присоединением шарнирного изгиба Г-образного рычага с верхним рабочим телом, фиксируют третий по порядку раз поднятую точку опоры Г-образного рычага, освобождают зафиксированные рабочие тела для их свободного рычажного поворота под действием гравитационной силы относительно третьей по порядку зафиксированной поднятой точки опоры Г-образного рычага, отслеживают угол поворота рабочих тел относительно третьей по порядку зафиксированной поднятой точки опоры и в момент горизонтального положения Г-образного рычага устанавливают его шарнирный изгиб под прямым углом, повторяют действия над рабочими телами с помощью Г-образного рычага с шарнирным изгибом, фиксируя каждый очередной возрастающий по порядку подъем точки опоры Г-образного рычага до максимально возможного значения.
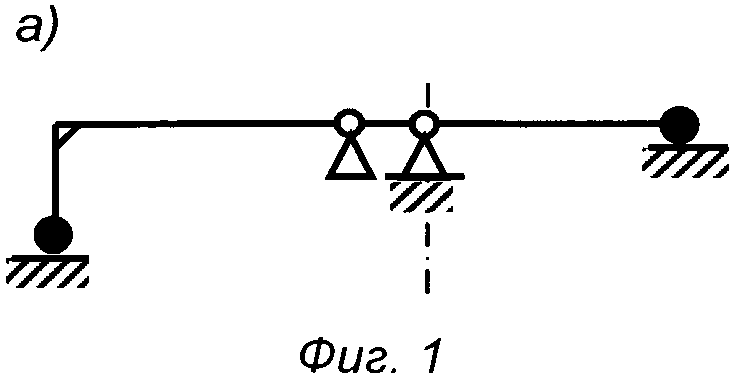
Пример технической реализации предлагаемого способа гравитационного подъема пары одинаковых по весу рабочих тел, связанных между собой Г-образным рычагом, проиллюстрирован на фиг. 1, где показано:
фиг. 1, а - исходное состояние Г-образного рычага с установленными рабочими телами на его концах в горизонтальном зафиксированном положении и со сдвинутой зафиксированной точкой опоры в направлении, противоположном изгибу под прямым углом рычага;
фиг. 1, б - зафиксированное состояние рабочих тел после окончания их рычажного поворота под действием гравитационных сил относительно ранее зафиксированной сдвинутой точки опоры;
фиг. 1, в - положение рабочих тел после окончания их рычажного поворота под действием гравитационных сил относительно ранее зафиксированной точки опоры с вновь установленным Г-образным рычагом, зафиксированная точка опоры которого располагается выше ранее зафиксированной точки опоры и верхнее плечо Г-образного рычага длиннее нижнего плеча этого Г-образного рычага и соединено с верхним рабочим телом с помощью шарнирного изгиба;
фиг. 1, г - свободное состояние рабочих тел, установленных на концах Г-образного рычага с шарнирным изгибом и с поднятой на высоту h1 зафиксированной точкой опоры;
фиг. 1, д - горизонтальное положение Г-образного рычага с шарнирным под прямым углом изгибом в момент его поворота под действием гравитационных сил относительно второй по порядку зафиксированной поднятой точки опоры и в момент установки прямого угла шарнирного изгиба Г-образного рычага;
фиг. 1, е - зафиксированное состояние рабочих тел после окончания их рычажного поворота под действием гравитационных сил относительно второй по порядку зафиксированной точки опоры;
фиг. 1, ж - расположение Г-образного рычага с шарнирным изгибом между верхним и нижним зафиксированными рабочими телами с шарнирным изгибом у верхнего рабочего тела при нахождении точки опоры рычага выше второй по порядку ранее зафиксированной точки опоры;
фиг. 1, з - передвижение зафиксированных рабочих тел навстречу друг другу в горизонтальном направлении на расстояние, не превышающее первоначальную длину Г-образного рычага, для предупреждения формирования чрезмерно большой длины Г-образного рычага при последующих поворотах рабочих тел относительно зафиксированных точек опоры;
фиг. 1, и - горизонтальное положение Г-образного рычага с зафиксированным под прямым углом шарнирным изгибом в момент его поворота под действием гравитационных сил относительно третьей по порядку зафиксированной поднятой точки опоры и в момент установки прямого угла шарнирного изгиба Г-образного рычага, которое совпадает с исходным состоянием (фиг. 1, а) рабочих тел и шарнира Г-образного рычага.
На фиг. 1 средства фиксации рабочих тел и точек опоры Г-образных рычагов не раскрыты, так как их функцию могут выполнять подвешенные канаты, веревки, тросы, цепи и др. с зацепками (трещетками) или различные подпорки, подставки, каменные блоки и др., включая те, которые возможно использовались при строительстве египетских пирамид. Средства фиксации обозначены на фиг. 1 штриховыми наклонными линиями. Длина Г-образного рычага может изменяться либо автоматически с использованием телескопических конструкций или вручную выбором рычага из заранее заготовленного комплекта
Г- образных рычагов. Г-образный рычаг всегда характеризуется наличием изгиба на его конце под различным углом, включая прямой угол. Рабочие тела обозначены залитыми черным цветом кружками, шарниры опор и рычагов показаны в виде кружков, прямой угол расположения шарнирного изгиба Г-образного рычага обозначен диагональной линией.
Техническая реализация предлагаемого способа рычажно-гравитационного подъема спаренных рабочих тел происходит следующим образом.
Зафиксированные рабочие тела на концах Г-образного рычага (фиг. 1, а) удалены друг от друга на одинаковое расстояние относительно незафиксированной точки опоры. Смещают точку опоры Г-образного рычага от его изгиба на расстояние, не превышающее длины этого изгиба Г-образного рычага, и фиксируют смещенную точку опоры, относительно которой длина плеча рычага с изгибом больше длины плеча рычага без изгиба. Далее освобождают от средств фиксации рабочие тела для их свободного под действием гравитационных сил рычажного поворота относительно зафиксированной смещенной точки опоры. Так как длина плеча Г-образного рычага с изгибом больше длины плеча рычага без изгиба на расстояние, не превышающее длины этого изгиба, то после завершения рычажного поворота рабочих тел относительно зафиксированной смещенной точки опоры, плечо рычага с изгибом всегда окажется ниже плеча рычага без изгиба и не пересекает вертикальную линию, проходящую через точку опоры, что проиллюстрировано на фиг. 1, б. Расстояние взаимного удаления верхнего и нижнего рабочих тел относительно вертикальной осевой линии одинаково. В этом состоянии фиксируют положения рабочих тел и точки опоры Г-образного рычага.
Далее соединяют Г-образным рычагом с шарнирным изгибом нижнее и верхнее рабочие тела (фиг. 1, в). Шарнирный изгиб Г-образного рычага устанавливают всегда для верхнего рабочего тела и длина плеча рычага с шарнирным изгибом всегда больше длины плеча этого Г-образного рычага без изгиба. После того, как установили Г-образный рычаг с шарнирным изгибом между зафиксированными рабочими телами повторно (вновь) фиксируют точку опоры этого рычага. Повторная (новая) зафиксированная точка опоры Г образного рычага с шарнирным изгибом всегда оказывается выше ранее зафиксированной точки опоры этого Г-образного рычага, что обеспечивает достижение технической задачи изобретения, а именно: использование гравитационной силы для подъема груза, каким являются спаренные рабочие тела. Достигаемый технический результат изобретения характеризуется значением высоты h1 подъема повторной зафиксированной точки опоры Г-образного рычага.
Следующее действие над материальными рабочими телами состоит в том, что освобождают (фиг. 1, г) рабочие тела от их фиксации для свободного рычажного поворота под действием гравитационных сил относительно повторной зафиксированной точки опоры. Гарантированный поворот рычага с рабочими телами относительно повторной зафиксированной точки опоры обеспечивается тем, что длина верхнего плеча Г-образного рычага больше длины нижнего плеча этого Г-образного рычага с шарнирным изгибом. Отслеживая поворот Г-образного рычага под действием сил гравитации относительно повторной зафиксированной точки опоры устанавливаем прямой угол (фиг. 1, д) изгиба шарнирного конца Г-образного рычага. В горизонтальном положении Г-образного рычага рабочие тела разнесены друг от друга относительно вертикальной линии подвеса зафиксированной точки опоры на разные расстояния, обеспечивая разной длины плечи рычага для дальнейшего его поворота под действием гравитационной силы.
После завершения поворота Г-образного рычага с шарнирным изгибом под прямым углом фиксируют положение рабочих тел, что проиллюстрировано на фиг. 1, е. Из фиг. 1, в видно, что рабочие тела удалены друг от друга относительно вертикальной линии на одинаковые расстояния. Вертикальная линия проходит через ранее зафиксированные точки опоры, полученные с использованием гравитационных сил, что расширяет область применения изобретения не только для подъема грузов, но и для определения положения вертикальной линии без известных отвесов.
Далее выполняют действие над рабочими телами с помощью Г-образного рычага (фиг. 1, ж), аналогичное действию над этими рабочими телами, проиллюстрированного на фиг. 1, в, а именно: устанавливают между зафиксированными рабочими телами Г-образный рычаг с шарнирным изгибом для верхнего рабочего тела. Прямолинейный участок Г-образного рычага проходит выше ранее повторно зафиксированной точки опоры на высоте, значение которой превышает h1, выполняя неравенство вида:
|
Из неравенства (1) следует, что техническая задача изобретения достигается и точка опоры Г-образного рычага поднимается под действием на рабочие тела гравитационной силы.
Дальнейший подъем точки опоры Г-образного рычага, связывающего между собой рабочие тела, требует дальнейшего увеличения длины плеч этого Г-образного рычага, что в свою очередь потребует увеличения прочности рычага и его веса, что крайне нежелательно. Поэтому на фиг. 1, з показано действие над рабочими телами по их сближению к друг другу в горизонтальном направлении к вертикальной линии. Для облегчения горизонтального перемещения рабочих тел целесообразно фиксирующие поверхности, например, подставки, выполнить с небольшим уклоном к вертикальной линии или использовать в качестве фиксирующих средств канаты (цепи, веревки), когда подвешенные на них рабочие тела сравнительно легко отклоняются от своего вертикального положения. После перемещения рабочих тел друг к другу на расстояние, не превышающее первоначальной длины Г-образного рычага (фиг. 1, а), фиксируют очередной, по порядку третий раз, точку его опоры и очередной раз освобождают рабочие тела для их свободного рычажного поворота под действием сил гравитации относительно зафиксированной точки опоры.
В результате очередного отслеживания угла поворота Г-образного рычага в момент нахождения его в горизонтальном положении (фиг. 1, и) устанавливают шарнирный изгиб Г-образного рычага под прямым углом, что аналогично действию над рабочими телами, ранее проиллюстрированному на фиг. 1, д. При этом выполнение неравенства (1) очередной раз подтверждает достижение технической задачи изобретения, а именно: расширение возможного использования энергии гравитационного поля земли для механизированного подъема спаренных с помощью Г-образного рычага двух одинаковых по весу грузов.
Промышленная осуществимость изобретения обосновывается тем, что в нем использованы известные в механике рычаги, шарниры и упоры по своему прямому функциональному назначению. В организации-заявителе изготовлена демонстрационная модель устройства, реализующего заявленный способ рычажно-гравитационного подъема рабочего тела в 2013 году.
Положительный эффект от использования изобретения состоит в том, что обеспечивается расширение не менее чем на 30…40% возможного использования энергии гравитационного поля Земли для механизированного подъема спаренных с помощью Г-образного рычага двух одинаковых по весу грузов.
Способ рычажно-гравитационного подъема спаренных рабочих тел, характеризующийся тем, что фиксируют взаимное расположение двух соседних между собой рабочих тел одинакового веса относительно поверхности земли на концах Г-образного рычага с точкой опоры в его середине, смещают точку опоры Г-образного рычага в сторону, противоположную изгибу рычага на расстояние, не превышающее длины его изгиба, фиксируют смещенную точку опоры Г-образного рычага относительно земной поверхности, освобождают зафиксированные рабочие тела для их свободного рычажного поворота под действием гравитационной силы относительно зафиксированной смещенной точки опоры, фиксируют взаимное положение рабочих тел одно выше другого после завершения их рычажного поворота, соединяют с помощью Г-образного рычага с шарнирным изгибом нижнее зафиксированное рабочее тело с верхним зафиксированным рабочим телом по прямой линии, проходящей выше ранее зафиксированной смещенной точки опоры и состоящей из двух отрезков, верхний из которых длиннее нижнего отрезка, с присоединением шарнирного изгиба Г- образного рычага к верхнему рабочему телу, фиксируют второй по порядку раз поднятую точку опоры Г-образного рычага, освобождают зафиксированные рабочие тела для их свободного рычажного поворота под действием гравитационной силы относительно второй по порядку зафиксированной поднятой точки опоры Г-образного рычага, отслеживают угол поворота рабочих тел относительно второй по порядку зафиксированной поднятой точки опоры и в момент горизонтального положения Г- образного рычага устанавливают его шарнирный изгиб под прямым углом, фиксируют взаимное расположение рабочих тел после завершения их рычажного поворота относительно второй по порядку зафиксированной поднятой точки опоры Г-образного рычага, перемещают во встречном горизонтальном направлении друг к другу рабочие тела на расстояние, не превышающее первоначальной длины Г-образного рычага, соединяют с помощью Г-образного рычага с шарнирным изгибом нижнее перемещенное зафиксированное рабочее тело с верхним перемещенным зафиксированным рабочим телом по прямой линии, проходящей выше ранее зафиксированной второй по порядку поднятой точки опоры и состоящей из двух отрезков, верхний из которых длиннее нижнего отрезка, с присоединением шарнирного изгиба Г-образного рычага с верхним рабочим телом, фиксируют третий по порядку раз поднятую точку опоры Г-образного рычага, освобождают зафиксированные рабочие тела для их свободного рычажного поворота под действием гравитационной силы относительно третьей по порядку зафиксированной поднятой точки опоры Г-образного рычага, отслеживают угол поворота рабочих тел относительно третьей по порядку зафиксированной поднятой точки опоры и в момент горизонтального положения Г-образного рычага устанавливают его шарнирный изгиб под прямым углом, повторяют действия над рабочими телами с помощью Г-образного рычага с шарнирным изгибом, фиксируя каждый очередной возрастающий по порядку подъем точки опоры Г-образного рычага до максимально возможного значения.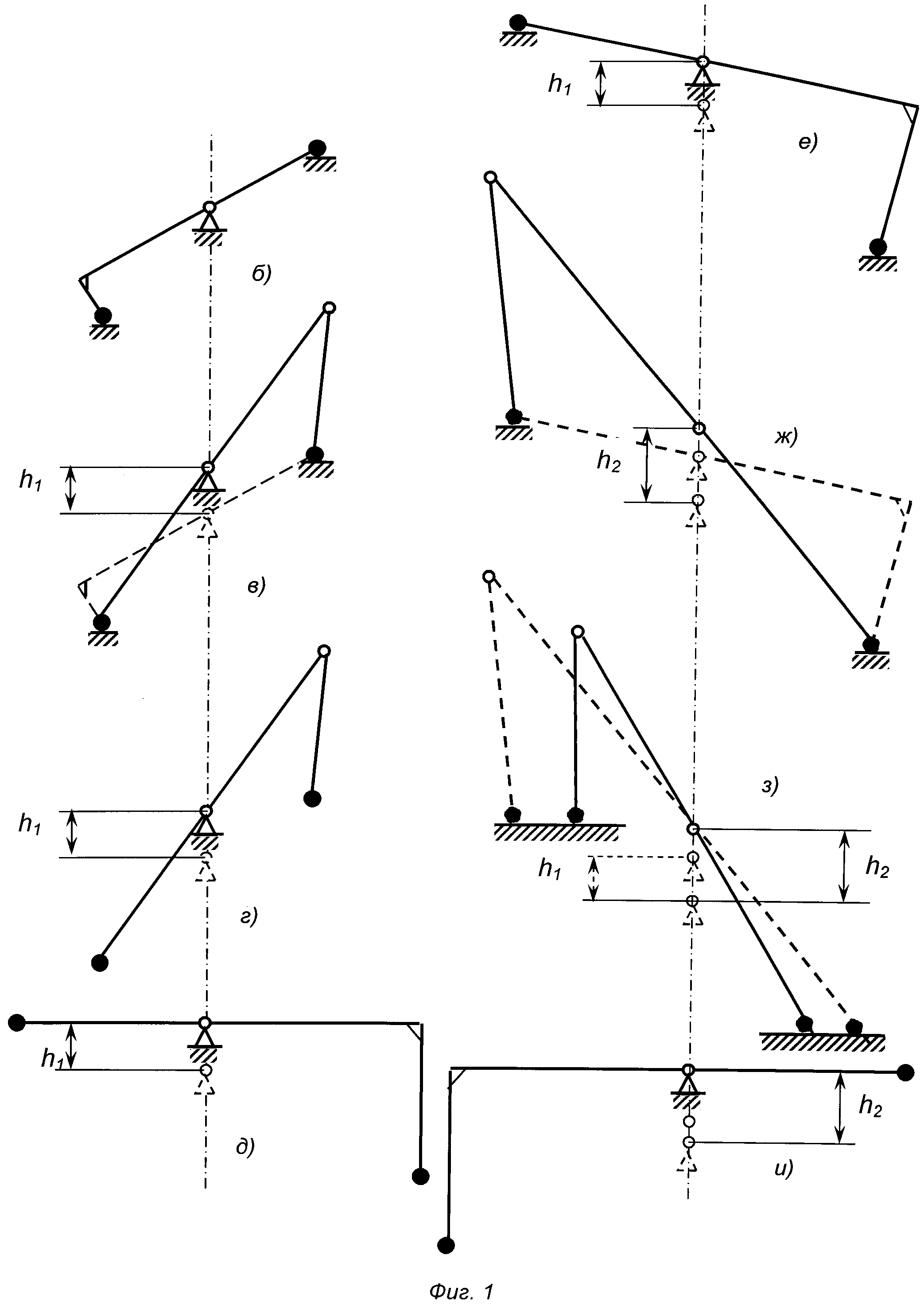
Способ преобразования ветровой энергии в механическую
Адаптивная система радиосвязи
Способ ввода букв и знаков для мобильных телефонов
Способ производства холода в криогенной компрессорно-детандерной установке разделения воздуха
Цилиндровый механизм замка с автоматической сменой кода и телескопическим ключом
Способ повышения скрытности радиоизлучающего средства в радиолинии с ппрч
Устройство пеленгации исскуственных ионосферных образований
Устройство для кислородно-флюсовой резки
Устройство хранения и передачи данных с исправлением ошибок в двух байтах информации
Устройство для демодуляции радиосигналов с плавно изменяющимися подъемами и спадами радиоимпульсов
Способ преобразования ветровой энергии в механическую
Адаптивная система радиосвязи
Способ ввода букв и знаков для мобильных телефонов
Способ производства холода в криогенной компрессорно-детандерной установке разделения воздуха
Цилиндровый механизм замка с автоматической сменой кода и телескопическим ключом
Способ повышения скрытности радиоизлучающего средства в радиолинии с ппрч
Устройство пеленгации исскуственных ионосферных образований
Устройство для кислородно-флюсовой резки
Устройство хранения и передачи данных с исправлением ошибок в двух байтах информации
Устройство для демодуляции радиосигналов с плавно изменяющимися подъемами и спадами радиоимпульсов

