СИСТЕМА РАДИОСВЯЗИ С КОНТРОЛИРУЕМЫМИ ОБЪЕКТАМИ
Вид РИД
Изобретение
Изобретение относится к электрорадиотехнике, а именно системам радиосвязи с контролируемыми стационарными или подвижными объектами, и, в частности, может использоваться в охранных системах и системах мониторинга состояния контролируемых объектов.
Известны системы радиосвязи, обеспечивающие передачу по радиоканалу сигналов о состоянии контролируемых объектов.
Например, известно устройство по патенту DE №195063385, включающее объект охраны, снабженный двумя радиопередатчиками, работающими с взаимным разносом частот, два приемника, расположенных на пункте централизованного наблюдения.
Наличие двух радиоканалов повышает надежность объекта. Однако данный аналог имеет недостаток, заключающийся в том, что повышение надежности охраны требует существенного усложнения устройства и, как следствие, часто неоправданно высоких экономических затрат на его производство и эксплуатацию.
Известна также система радиосвязи с контролируемым объектом по патенту RU №2165677. Известное устройство состоит из приемной и передающей частей, образующих канал радиосвязи. Приемная часть расположена в пункте централизованного наблюдения (ПЦН) и включает в состав приемную антенну и радиоприемник. Передающая часть установлена на контролируемом объекте (КО) и включает источник информации и генератор несущей частоты, выход которого подключен к входу балансового модулятора, выход которого в свою очередь через усилитель мощности подключен к передающей антенне. Недостатком известного аналога является относительно малая зона устойчивого контроля, система радиосвязи обеспечивает уверенный прием сигналов от КО на ПЦН на удалении единиц километров, а в городских условиях это расстояние уменьшается.
Наиболее близким аналогом (прототипом) по своей технической сущности к заявленной является известная система радиосвязи с контролируемыми объектами по патенту RU №2391711, МПК Н04В 1/68, G08B 25/0, опубликованному 10.06.2010, бюллетень №16.
Известная система радиосвязи с контролируемыми объектами состоит из пункта централизованного наблюдения (ПЦН), снабженного средством визуализации состояния контролируемых объектов (КО), приемной и передающей части. Приемная часть расположена в ПЦН и включает блок приемников, подключенный через антенный разветвитель к приемной антенне, и блок цифровой обработки сигналов (БЦОС). Выход приемников подключен к входам средства визуализации. Передающая часть установлена на каждом КО и включает источник информации, модулятор несущей частоты, генератор несущей частоты, балансный модулятор, усилитель мощности, сумматор, генератор поднесущей частоты, формирователь напряжения баланса и передающую антенну.
Ближайший аналог за счет принятого способа формирования в передающей части информационного сигнала обеспечивает некоторое повышение помехозащищенности канала радиосвязи.
Недостатком ближайшего аналога остается относительно малая зона устойчивого и надежного наблюдения состояния КО в силу нормативных ограничений на мощность используемых на КО передатчиков.
Целью заявляемого технического решения является разработка системы радиосвязи с контролируемыми объектами, обеспечивающей расширение зоны устойчивого и надежного наблюдения за состоянием КО без увеличения мощности устанавливаемых на КО передатчиков.
Поставленная цель достигается тем, что в известной системе радиосвязи с КО, содержащей ПЦН, снабженный средством визуализации состояний КО с установленным на каждом из них передающим устройством (ПрдУ), содержащим передатчик (Прд), выход которого подключен к передающей антенне, приемную станцию (ПрмС), содержащую приемник (Прм), вход которого через первый антенный усилитель подключен к приемной антенне, и блок цифровой обработки сигналов (БЦОС), вход которого подключен к выходу Прм, дополнительно введены N≥1 территориально разнесенных ПрмС, с выходов которых информационные сигналы по дополнительным каналам связи передают на соответствующие входы ПЦН. В каждой ПрмС приемная антенна выполнена в виде двух пространственно-разнесенных антенных элементов, которые соответственно через первый и дополнительно введенный второй антенные усилители подключены к первому и второму входам двухканального Прм, первый и второй выходы двухканального Прм подключены соответственно к первому и второму входам БЦОС. Выход БЦОС подключен к входу блока вторичной цифровой обработки сигналов (БВЦОС). Выход БВЦОС подключен к входу блока передачи данных (БПД), выход которого является выходом ПрмС. В каждое ПрдУ дополнительно введены спутниковый навигационной приемник (СНП), выход которого подключен к входу «координаты» управляющего контроллера, информационный выход которого подключен к входу Прд, и блок согласования интерфейсов (БСИ). Р≥1 информационных входов и К≥1 управляющих выходов БСИ подключены соответственно к Р датчикам состояния КО и к К исполнительным элементам и индикаторам, размещенным на КО. Шина информационных сигналов БСИ подключена к информационным входам/выходам управляющего контроллера. БЦОС состоит из аналого-цифрового преобразователя (АЦП), первый и второй входы которого являются первым и вторым входами БЦОС, выход АЦП подключен к входу цифрового фильтра, выход которого подключен к входу цифрового сигнального процессора (ЦСП), выход которого является выходом БЦОС.
БВЦОС состоит из электронно-вычислительной машины (ЭВМ) с установленным специальным программным обеспечением, вход и выход которой являются соответственно входом и выходом БВЦОС.
Указанная новая совокупность существенных признаков заявленной системы радиосвязи с контролируемыми объектами за счет пространственного разнесения ПрмС и передачи с их выходов принятых от КО информационных сигналов о состоянии КО обеспечивает расширение зоны устойчивого и надежного наблюдения за состоянием КО без увеличения нормативно установленной предельно допустимой мощности излучения передатчиков, установленных на КО. Кроме того, за счет применения двух пространственно-разнесенных на ПрмС антенных элементов достигается снижение интерференционных замираний принятых Прм сигналов в городских условиях, обусловленных многолучевостью сигналов, отраженных от городских строений.
Заявленная система радиосвязи с КО поясняется чертежами, на которых показано:
Фиг.1 - общая структурная схема системы радиосвязи;
Фиг.2 - структурная схема ПЦН;
Фиг.3 - структурная схема ПрмС;
Фиг.4 - структурная схема передающего устройства;
Фиг.5 - блок-схема алгоритма работы системы радиосвязи с КО;
Фиг.6 - структурная схема БЦОС.
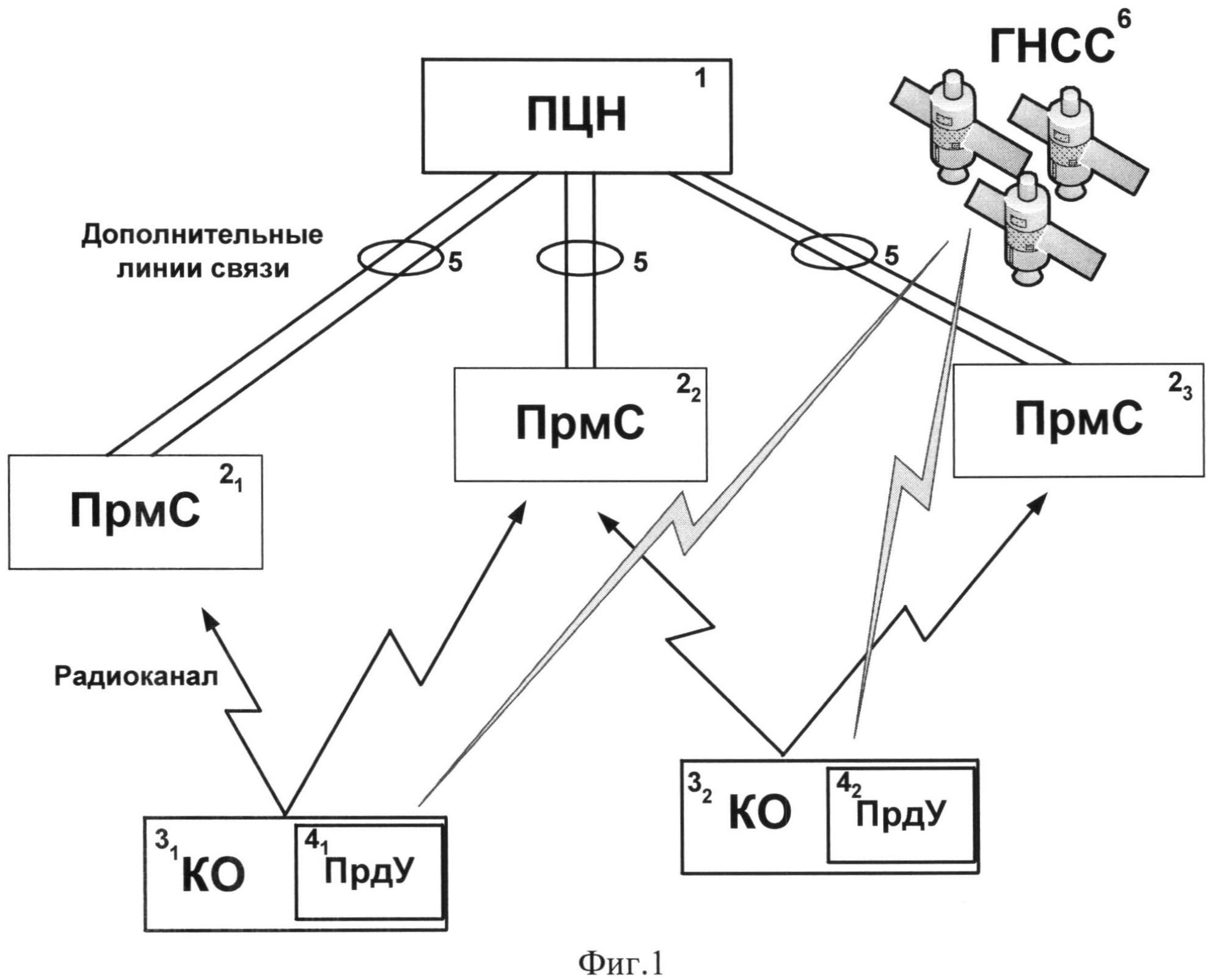
Заявленная система радиосвязи с КО, показанная на фиг.1, состоит из ПЦН 1, N≥1 ПрмС 21-2N, совокупности КО 31, 32, …, каждый из которых снабжен ПрдУ 4. Выходы ПрмС 2 дополнительными каналами связи 5 соединены с входами ПЦН1. Дополнительные каналы связи 5 могут быть реализованы по кабельным (проводным, волоконно-оптическим) линиям или с использованием дополнительных каналов связи, например, радиорелейных.
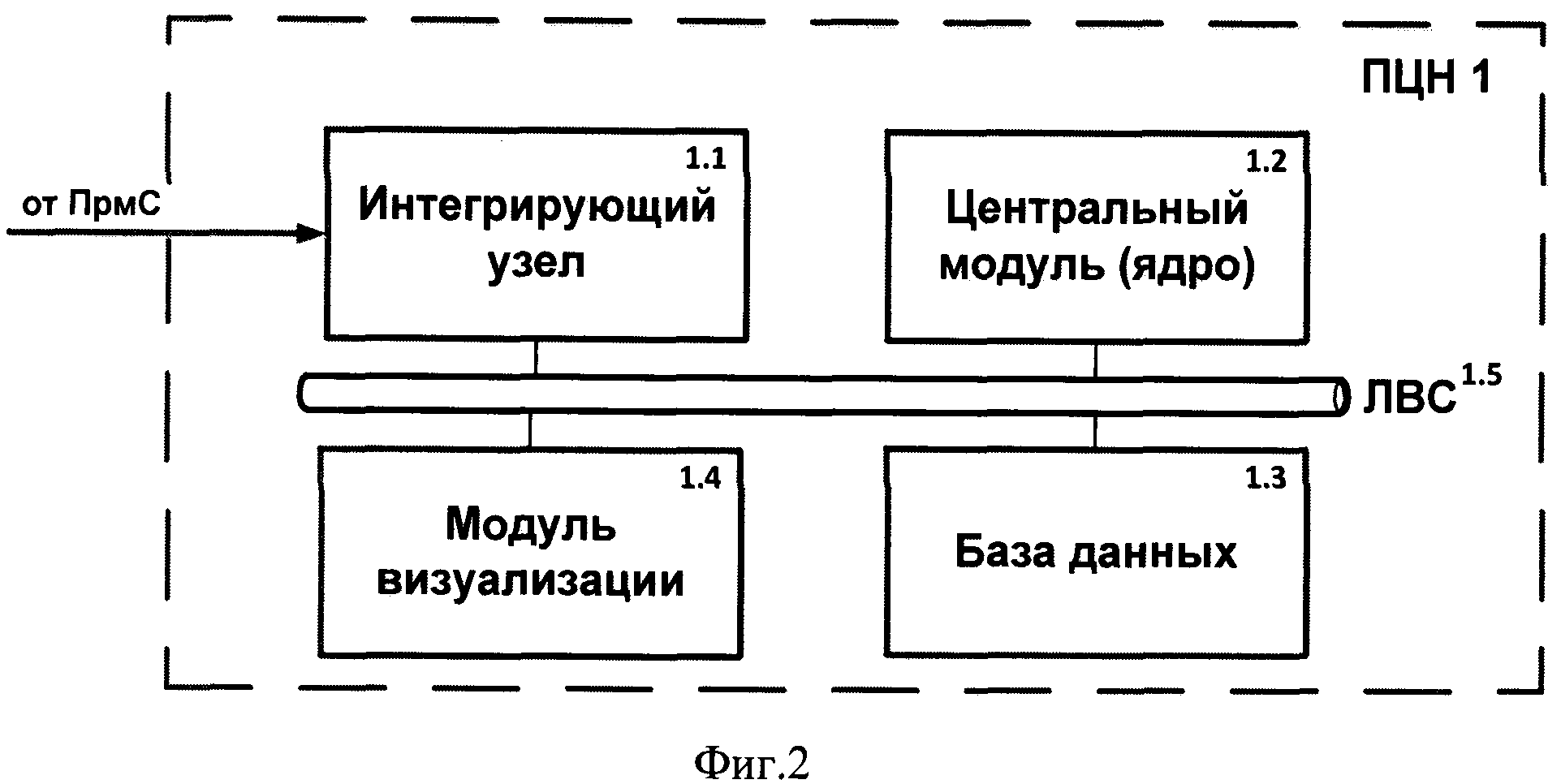
ПЦН 1, структурная схема которого показана на фиг.2, предназначен для приема сигналов состояния контролируемых объектов от различных подсистем, включая ПрмС, последующей их обработки, записи в базу данных и визуализации на автоматизированных рабочих местах операторов. ПЦН 1 состоит из узлов: интегрирующий узел 1.1, центральный модуль 1.2, база данных 1.3, модуль визуализации 1.4. Все узлы ПЦН 1 соединены между собой через локальную вычислительную сеть (ЛВС) 1.5, которая обеспечивает двустороннюю передачу информации между узлами.
Интегрирующий узел 1.1 предназначен для приема сообщений от различных ПрмС, их декодирования, приведения в единый формат и передачи на центральный модуль 1.2 для последующей обработки. Интегрирующий модуль может быть реализован на базе сервера, построенного на платформе х86 с установленным специальным программным обеспечением.
Центральный модуль 1.2 предназначен для получения информации о состоянии КО от интегрирующего узла 1.1, ее обработки в соответствии с заданными настройками и правилами, записи в базу данных 1.3 и передачи на модуль визуализации 1.4. Центральный модуль может быть реализован на базе сервера, построенного на платформе х86 с установленным специальным программным обеспечением.
База данных 1.3 предназначена для структурированного хранения данных получаемых от центрального модуля и последующей выдачи на модуль визуализации 1.4. База данных может быть реализована на базе сервера, построенного на платформе х86 с установленным специальным программным обеспечением.
Модуль визуализации предназначен для визуализации информации о состоянии КО на экране монитора в текстовом и/или графическом виде. В качестве модуля визуализации может быть использовано автоматизированное рабочее место (АРМ) оператора, включающее ЭВМ, монитор, манипуляторы (клавиатура, мышь) и специальное программное обеспечение.
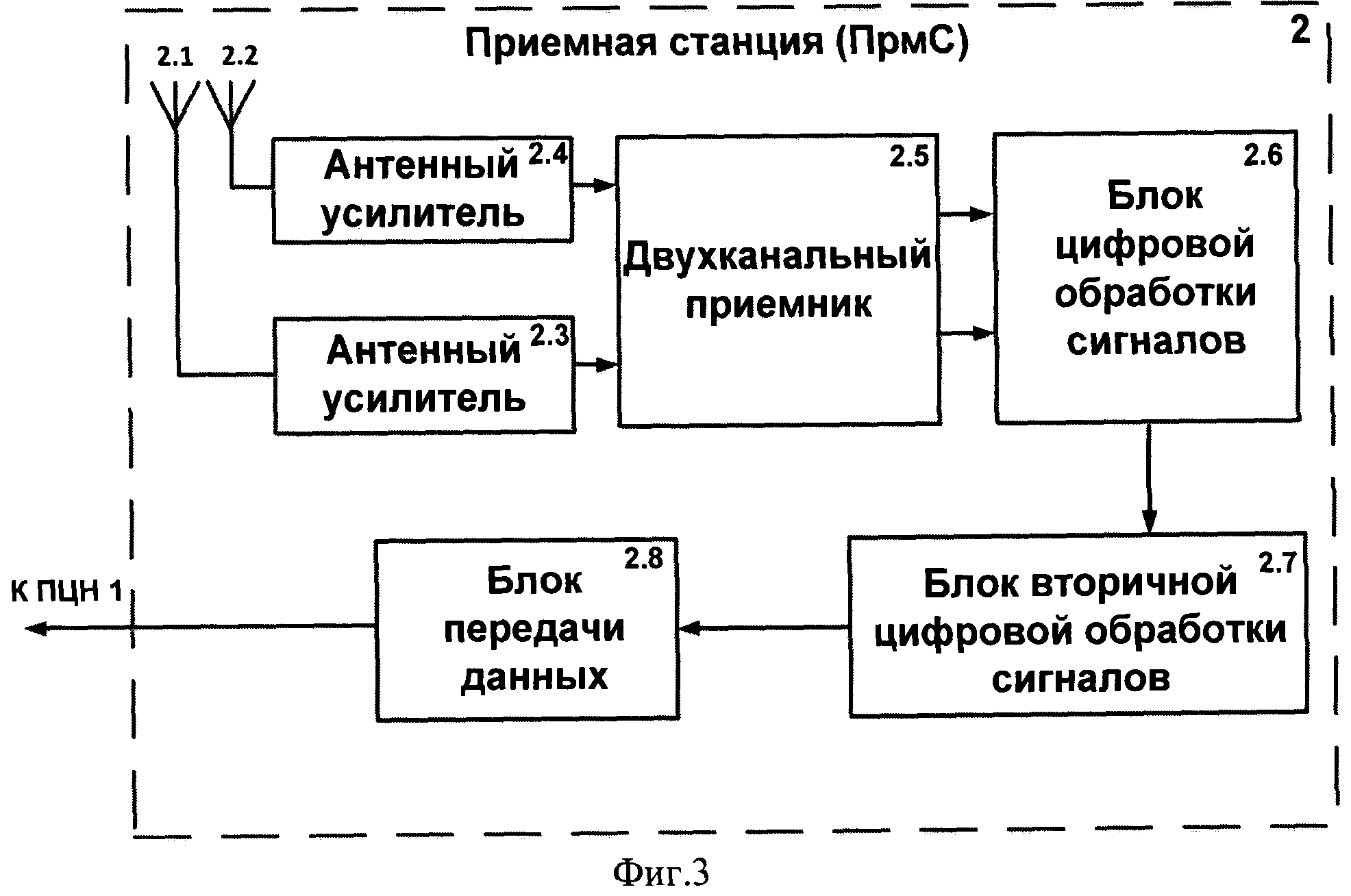
ПрмС 2, структурная схема которой показана на фиг.3, предназначена для приема радиосигналов от Прд 4, установленных на КО, их обработки, декодирования и передачи ПЦН 1. ПрмС 2 состоит из двух пространственно-разнесенных антенных элементов 2.1 и 2.2, которые через соответственно первый 2.3 и второй 2.4 антенные усилители подключены к первому и второму входам двухканального приемника 2.5. Первый и второй выходы двухканального приемника 2.5 подключены соответственно к первому и второму входам БЦОС 2.6, выход которого подключен к входу БВЦОС 2.7. Выход БВЦОС подключен к входу БПД 2.8, выход которого является выходом ПрмС 2.
В качестве антенных элементов 2.1 и 2.2 могут использоваться, например, несимметричные вертикальные вибраторы, настроенные на рабочую полосу частот.
Антенные усилители 2.3 и 2.4 предназначены для предварительной селекции и усиления сигналов, принятых от КО 3. В качестве антенных усилителей 2.3 и 2.4 могут быть использованы серийно выпускаемые усилители Radial AGS-19V.
Двухканальный приемник 2.5 предназначен для селекции и усиления сигналов, принятых от КО 3, переноса спектра на промежуточную частоту (ПЧ) и передачи сигналов на БЦОС. В качестве двухканального приемника может быть использован сдвоенный приемник на базе серийно выпускаемых модулей ICOM IC-R8500.
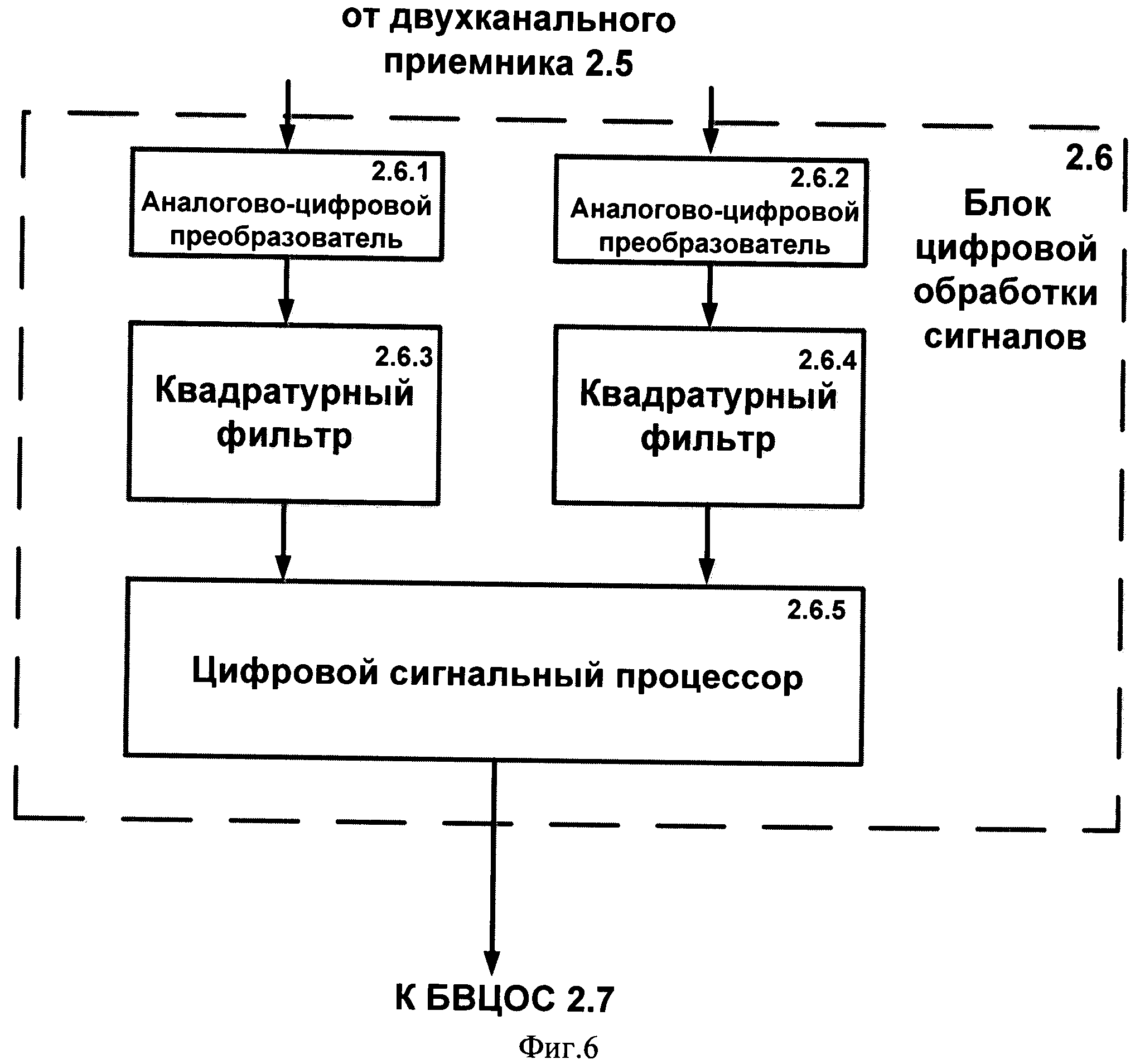
БЦОС 2.6 предназначен для оцифровки сигналов, их квадратурной фильтрации, переноса спектра на нулевую частоту, расчета спектральной мощности.
Структурная схема БЦОС 2.6, показанная на фиг.6, состоит из двух аналогово-цифровых преобразователей 2.6.1 и 2.6.2, входы которых являются входами БЦОС 2.6, а выходы которых подключены к соответствующим входам двух квадратурных фильтров 2.6.3 и 2.6.4. Выходы квадратурных фильтров 2.6.3 и 2.6.4 подключены к входу цифрового сигнального процессора (ЦСП) 2.6.5, выход ЦСП является выходом БЦОС 2.6.
В качестве БЦОС может быть использован серийно выпускаемый модуль ADP160QPCI.
БВЦОС 2.7 предназначен для выделения сообщения в каждом частотном канале, его декодирования и передачи в БПД 2.8.
БВЦОС 2.7 может быть реализована на базе ЭВМ, построенной на платформе х86 с установленным специальным программным обеспечением.
БПД 2.8 предназначен для передачи обработанных данных в канал передачи данных между ПрмС 2 и ПЦН 1.
В качестве БПД может быть использован модем либо сетевая плата, тип которой определяется физическим интерфейсом подключения к каналу передачи данных.
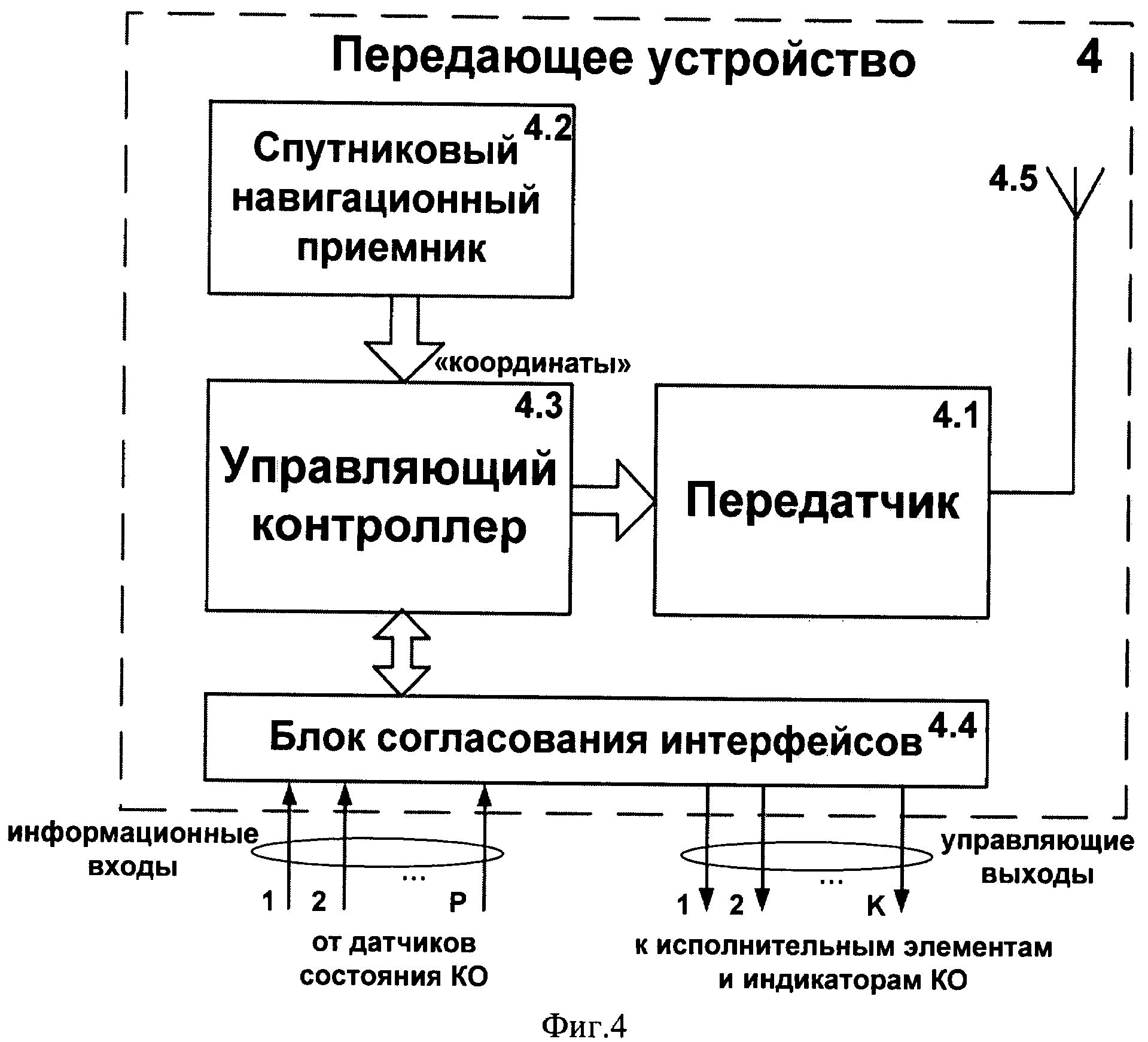
ПрдУ 4 предназначено для контроля датчиков состояния КО 3, управления исполнительными элементами и индикаторами, определения текущего положения КО 3 и передачи информации о состоянии КО 3 на ПрмС 2.
ПрдУ 4, структурная которого показана на фиг.4, состоит из Прд 4.1, выход которого подключен к передающей антенне 4.5, СНП 4.2, выход которого подключен к входу «координаты» управляющего контроллера 4.3, и БСИ 4.4, Р≥1 информационных входов и К≥1 управляющих выходов которого подключены соответственно к Р датчикам состояния КО 3 и к К исполнительным элементам и индикаторам, размещенным на КО 3 (на фиг.4 не показаны). Шина информационных сигналов БСИ 4.4 подключена к информационным входам/выходам управляющего контроллера 4.3, информационный выход которого подключен к входу передатчика 4.1.
СНП 4.2 предназначен для определения местоположения через один из сегментов глобальной навигационной спутниковой системы (ГНСС) GPS/ГЛОНАСС 6 (см. фиг.1).
В качестве СНП может быть использован один из серийно выпускаемых спутниковых навигационных приемников, например ГЕОС1М.
Управляющий контроллер 4.3 предназначен для обработки полученных сигналов от СНП 4.2 и БСИ 4, формирования соответствующих управляющих сигналов, поступающих через БСИ 4.4 на исполнительные элементы и индикаторы, а также для формирования пакета данных для Прд 4.1. В качестве управляющего контроллера может быть использован серийно выпускаемый микроконтроллер Atmel ATMega 32.
БСИ 4.4 предназначен для согласования электрического интерфейса управляющего контроллера 4.3 и электрических интерфейсов подключения датчиков состояния КО 3 и исполнительных элементов и индикаторов КО.
БСИ может быть выполнен с использованием серийно выпускаемых электронных компонентов (резисторы, конденсаторы, транзисторы, твердотельные реле, диоды и т.д.). Конкретная схема реализации будет определяться типами электрических интерфейсов выбранного управляющего контроллера 4.3 и подключаемых датчиков состояния, исполнительных элементов и индикаторов КО 3.
Прд 4.1 предназначен для излучения сигналов о состоянии КО 3 в радиоэфир, которые принимают ПрмС 2 общей системы.
Прд 4.1 может быть выполнен на базе серийно выпускаемого модуля ADF4360.
Заявленное устройство работает следующим образом.
Предварительно на каждый КО 3 (как подвижный, так и стационарный) устанавливают ПрдУ 4. К Р информационным входам ПрдУ 4 подключают установленные на КО датчики состояния объекта (замок зажигания, концевые выключатели двери, датчик движения, температуры, уровня топлива и т.п. для подвижных объектов; датчик пожара, открытия дверей и т.д. для стационарных объектов).
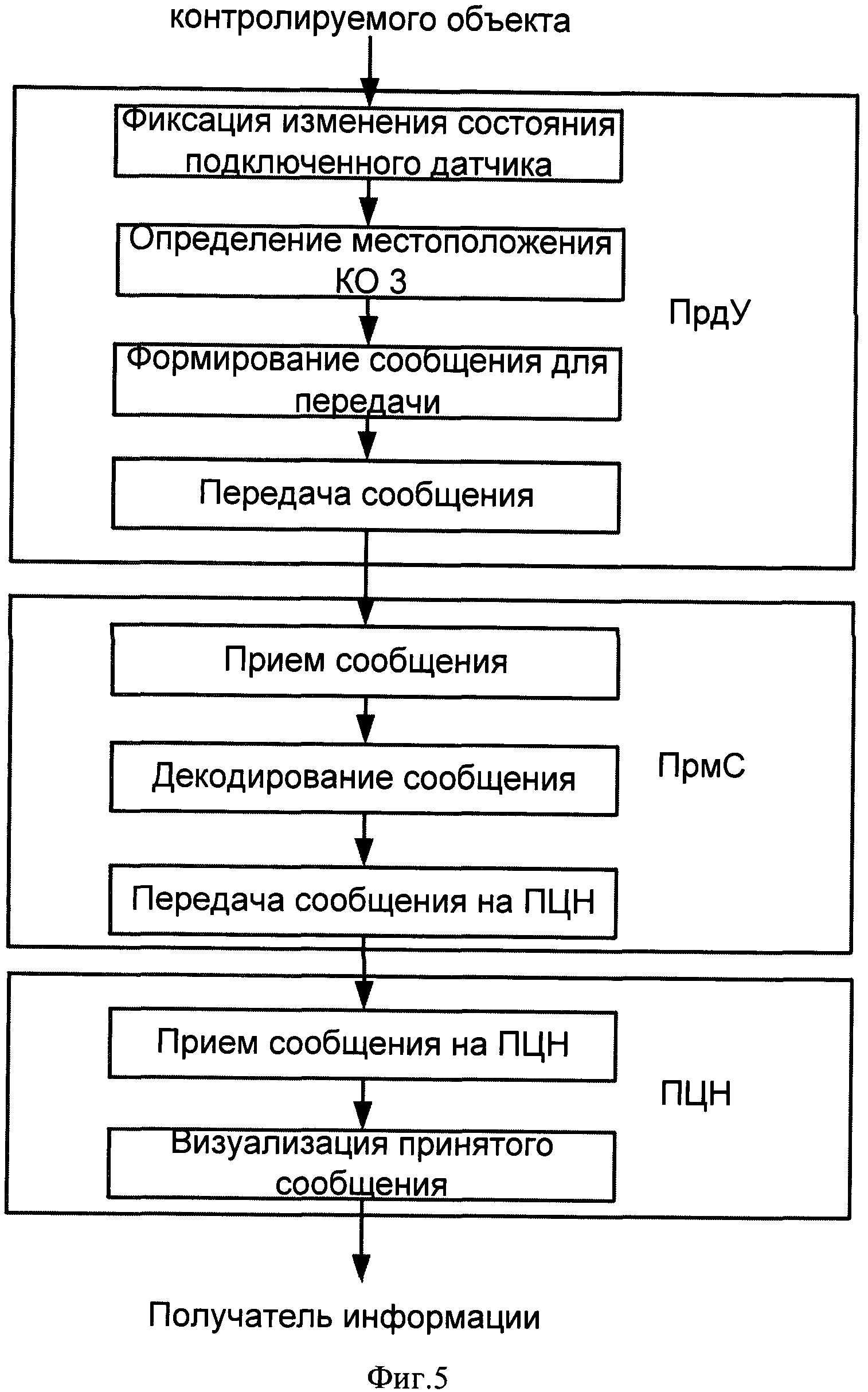
Управляющие К выходы БСИ 4.4 подключают к исполнительным элементам и индикаторам КО 4 (индикатор состояния, реле блокировки двигателя и т.д.). Далее заявленная система работает по алгоритму, структурная схема которого показана на фиг.5
Сигналы об исходном состоянии объекта и координаты местоположения объекта фиксируют в управляющем контроллере 4.3. По установленной программе управляющий контроллер 4.3 периодически «опрашивает» состояние подключенных датчиков и определяет текущее местоположение КО 4. В случае изменения состояния одного или нескольких датчиков либо изменения текущего местоположения КО 4 относительно первоначального в управляющем контроллере по установленному алгоритму формируют управляющий сигнал для приведения в соответствующее положение соответствующие исполнительные элементы или индикаторы. Одновременно управляющий контроллер 4.4 формирует информационный сигнал об изменении состояния КО 3, координатах его местоположения, состояния датчиков. Сформированный информационный сигнал подают на модулирующий вход Прд 4.1, с выхода которого высокочастотный сигнал, промодулированный информационным сигналом, с помощью передающей антенны 4.5 излучают в эфир.
Далее переданные в эфир сигналы состояния КО 3 принимают ПрмС 2 с помощью двух антенных элементов 2.1 и 2.2, с выхода которых они поступают на входы первого 2.3 и второго 2.4 антенных усилителей для предварительной селекции и усиления с последующей передачей на входы двухканального приемника 2.5. В двухканальном приемнике 2.5 принятые по каждому каналу сигналы фильтруют, усиливают и преобразуют на промежуточную частоту. С выходов двухканального приемника 2.5 сигналы подают на входы БЦОС 2.6, где аналоговые сигналы оцифровывают, фильтруют и переносят на нулевую частоту, далее в ЦСП 2.6.5 над полученными сигналами выполняют дискретное преобразование Фурье, рассчитывают спектральную мощность сигналов в каждом частотном канале, выделяют канал с наибольшим уровнем сигнала. Использование двухэлементной приемной антенны и дальнейшая обработка принятых сигналов по двум каналам позволяет повысить качество приема сигналов в условиях интерференционных замираний при многолучевом распространении сигнала, которое имеет место в городских условиях работы системы. Оцифровка сигналов на промежуточной частоте с последующей квадратурной обработкой, переносом спектра на нулевую частоту и выполнением быстрого преобразования Фурье позволяет повысить отношение сигнал/шум, а следовательно, увеличить дальность действия ПрмС 2. Полученный массив обработанных цифровых сигналов в форме частотно-временной матрицы о состоянии КО 3 подают на БВЦОС 2.7. В БВЦОС 2.7 выделяют сообщения о состоянии КО 3 в каждом частотном канале, декодируют и передают их по дополнительным линиям связи на вход интегрирующего узла 1.1 ПЦН 1 (см. фиг.2). Использование БВЦОС 2.7 позволяет повысить производительность системы, расширить диапазон рабочих частот и увеличить пропускную способность системы 1.
Далее на интегрирующем узле 1.1 ПЦН 1 производят прием сообщений от разных ПрмС 2, объединяют их и приводят приведение в единый формат с дальнейшей передачей на центральный модуль 1.2. На центральном модуле 1.2 сообщения обрабатывают в соответствии с заданными настройками и правилами, записывают в базу данных 1.3 и передают на модуль визуализации 1.4. С помощью модуля визуализации 1.4 информация о текущем состоянии КО 3 служит основанием операторам системы для принятия ими управленческих решений.
Таким образом, в заявленной системе благодаря использованию совокупности пространственно-разнесенных приемных станций, приему сигналов на пару разнесенных антенных элементов и дальнейшей их обработке по двум независимым приемным трактам достигается более устойчивое и надежное наблюдение на контролируемыми объектами, в более широкой зоне контроля и при относительно малой мощности передатчиков, устанавливаемых на контролируемых объектах, что подтверждает возможность достижения сформулированного технического результата при работ заявленной системы.