Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ
Вид РИД
Изобретение
Изобретение относится к радиолокации и может использоваться при радиоизмерениях для определения расстояния до источника излучения и направления на него, а также в комплексах радиоэлектронного подавления для повышения качества решаемых задач.
В настоящее время для некоторых измерительных комплексов (например, систем определения дальности до объектов радиотехническими методами, радионавигации и комплексах радиоэлектронного подавления) актуальна задача оперативного приближенного определения дальности до цели, получаемых автономной угломерной системой.
Известен ряд способов, используемых для определения дальности до подвижной цели по минимальному количеству пеленгов, текущих координат подвижных целей [см. 1. Мельников, Ю.П. Точность определения дальности до неизлучающих объектов аппаратурой воздушной радиотехнической разведки / Ю.П. Мельников С.В. Попов // Радиотехника. - 2005. - №10. - С. 124-128].
В данном способе для определения дальности до цели пассивная станция радиотехнической разведки (РТР) принимает отраженное от цели излучение активной РЛС, облучающей цель. Пассивная станция РТР по принятому излучению измеряет азимут и угол места цели, измерению также подлежат разности моментов прихода прямого (по боковому излучению РЛС) и отраженного от объекта сигнала. По данным измерениям и известному расстоянию до активной РЛС определяется расстояние до цели.
Однако в данном способе требуется использование дополнительной активной РЛС с известными координатами.
Известен способ определения местоположения источника радиоизлучения [см. 2. Патент РФ №2334244, МПК G01S 5/02, опубл. 20.09.2008], включающий измерение пеленга на источник радиоизлучения и определение дальности до источника радиоизлучения, основанный на том, что измеряют одновременно на одной высоте амплитуды напряженности электромагнитного поля источника радиоизлучения E1, E2 в двух разнесенных соответственно точках на расстояние b по линии пеленга и определяют дальность до источника радиоизлучения в соответствии с формулой  , при этом когда E1≤E2, то такие измерения отфильтровывают и в определении дальности не используют.
, при этом когда E1≤E2, то такие измерения отфильтровывают и в определении дальности не используют.
Однако при данном способе определения координат при определенных углах визирования источника радиоизлучения амплитуды напряженности электромагнитного поля источника радиоизлучения E1, E2 в двух разнесенных соответственно точках мало различаются друг от друга, что в совокупности с малым расстоянием между антеннами b предопределяет низкую точность измерения дальности.
Известен способ определения местоположения передатчика мобильным пеленгатором [см. 3. Патент РФ №2316784, МПК G01S 5/02, опубл. 10.02.2008], включающий периодическое измерение курсового угла и собственных координат мобильного пеленгатора, синхронно с этим прием радиосигналов передатчика с помощью антенн, образующих антенную решетку, и многоканального приемного устройства, проводящего измерения в каждом периоде принятых радиосигналов, которые затем преобразуют в пространственный спектр путем компенсации их расчетных, с учетом собственных координат и курсового угла мобильного пеленгатора, набегов фаз, последующего сложения радиосигналов и определения амплитуды суммарного радиосигнала, значения полученного пространственного спектра с весами, пропорциональными расчетному ослаблению радиосигналов передатчика при распространении их до мобильного пеленгатора, накапливают за все время движения пеленгатора, нормируют на среднее квадратичное весов с получением усредненного пространственного спектра, а местоположение передатчика определяют по максимуму усредненного пространственного спектра.
Однако в предложенном техническом решении возникает необходимость использования расчетного значения ослабления радиосигналов передатчика разведываемого РЭС, что накладывает определенные ограничения на использование способа. Кроме того, способ критичен к совокупности следующих факторов: мощности передатчика разведываемого РЭС, действующей высоте и высоте поднятия его антенны, высоте, на которой производится прием радиоизлучения, длине волны, параметрам подстилающей поверхности и затенений на трассе распространения радиоволн, шумам и помехам, приводящим к флуктуациям уровня принимаемых радиосигналов, что накладывает некоторые ограничения на использование данного способа.
Известен разностно-дальномерный способ пеленгования источника радиоизлучения и реализующее его устройство [см. 4. Патент РФ №2204145, МПК G01S 3/46, опубл. 10.05.2003]. Способ заключается в приеме и измерении задержек Δτi сигнала группой взаимосвязанных с известным местоположением пунктов приема, решении гиперболических уравнений на центральном приемном пункте, на основе которого определяют координаты источника радиоизлучения.
Однако для реализации данного способа необходимо использовать минимум три измерительных пункта и системы связи между ними, при этом все измерения должны производиться одновременно, и, как следствие, необходимость использования достаточно сложной системы единого времени, что затрудняет реализацию данных технических решений.
Известен разностно-доплеровский способ определения координат [см. 5. Кондратьев B.C. и др. Многопозиционные радиотехнические системы. - М.: Радио и связь, 1986. - 264 с.]. Сущность способа заключается в приеме сигнала источника радиоизлучения (ИРИ) на двух перемещающихся измерителях, ретрансляции сигналов на центральный пункт обработки, вычислении разности доплеровских частот и разности радиальных скоростей измерителей с последующим вычислением координат источника радиоизлучения (ИРИ) по разности доплеровских частот и разности радиальных скоростей.
Однако для реализации данного способа возникает необходимость использования минимум двух измерительных пунктов, кроме того, данные пункты должны перемещаться с достаточно большой скоростью, и данный способ не позволяет измерять координаты ИРИ, излучающих непрерывные или квазинепрерывные сигналы, т.к. в данном случае нельзя точно измерить разность частот сигнала.
Известен способ определения координат источников радиоизлучений [см. 6. Патент РФ №2306579, МПК G01S 5/02, опубл. 20.09.2007].
Данный способ включает прием сигналов источников радиоизлучений в заданной полосе частот ΔF перемещающимся в пространстве измерителем, измерение первичных координатно-информативных параметров обнаруженных сигналов с одновременным измерением и запоминанием вторичных параметров: координат местоположения измерителя, многократное повторное измерение совокупности первичных и вторичных параметров в процессе перемещения измерителя по свободной траектории, отличиями способа являются: выбор в качестве первичных координатно-информативных параметров уровня сигнала, при этом измеряют уровни сигнала в N (N≥4) точках при перемещении измерителя, последовательно вычисляют N-1 отношений уровней сигнала, по вычисленным отношениям строят N-1 круговых линий положения и определяют координаты источников радиоизлучений как точку пересечения N-1 круговых линий положения. Кроме того, при определении координат источников радиоизлучений используют  круговых линий положения, где
круговых линий положения, где  - число всех различных сочетаний из 2 по N.
- число всех различных сочетаний из 2 по N.
Однако необходимость измерения энергетических параметров сигналов для определения приращения уровня сигнала при движении измерителя накладывает ограничения при работе с передающими устройствами, использующими режимы вобуляции мощности, взаимное изменение в течение времени ориентации диаграмм направленности антенн, ввиду невозможности прогнозирования быстроменяющегося окружения измерителя затухание сигналов при дифракции от крыши ближайшего к измерителю здания и затухание сигналов от множественной дифракции плоских волн, вызванной рядами зданий на трассе, эти величины принимаются постоянными величинами на интервале соседних измерений, что может привести к ошибками измерений.
Известен [7. Патент РФ 2251709, МПК G01S 13/42, опубл. 10.05.2005] способ определения дальности до источника радиоизлучения и скорости сближения летательного аппарата с ним. Сущность предлагаемого способа заключается в том, что в момент времени t1 принимают радиосигналы от источника радиоизлучений (ИРИ) и измеряют значения углов поворота антенны в горизонтальной и вертикальной плоскостях. По принятым радиосигналам и измеренным значениям углов поворота антенны оценивают значения углов пеленга ИРИ и угловых скоростей его линии визирования в двух упомянутых плоскостях. По оцененным значениям углов пеленга ИРИ и угловых скоростей его линии визирования вычисляют экстраполированные значения углов пеленга ИРИ в вертикальной и горизонтальной плоскостях на следующий такт обработки сигналов. По экстраполированным значениям углов пеленга ИРИ в вертикальной и горизонтальной плоскостях и значениям углов поворота антенны формируют сигналы для управления антенной, по которым ее устанавливают в направление на ИРИ. Дополнительно измеряют частоту повторения импульсов Fп принятых радиосигналов, и если частота повторения импульсов Fп принятых радиосигналов низкая или средняя, то в момент времени t2=t1+Δt, где Δt - временной интервал обработки измерений, измеряют значения углов поворота антенны в горизонтальной и вертикальной плоскостях, скорость летательного аппарата и снова принимают радиосигналы от ИРИ, по принятым радиосигналам и измеренным значениям углов поворота антенны оценивают значения углов пеленга ИРИ и угловых скоростей линии визирования в соответствующих плоскостях, измеряют значение скорости летательного аппарата. Далее вычисляют дальность до ИРИ, используя для этого измеренное значение скорости, величину временного интервала Δt и значения измеренных и экстраполированных углов пеленга.
Если измеренная частота повторения импульсов Fп принятых радиосигналов высокая, то дальность до цели вычисляется по максимальному и минимальному значениям периода повторения импульсов и скорости света.
Скорость сближения с ИРИ вычисляют на основании полученного значения дальности, максимальному и минимальному значениям периода повторения импульсов, длительности цикла изменения периода повторения этих импульсов и скорости света. Вычисленные значения дальности и скорости сближения фильтруют, формируя их оценки, и выдают потребителям информации.
Однако в данном способе при экстраполяции на незначительное время значений углов пеленга ИРИ точность измерения дальности невелика. При пеленгации ИРИ с шумоподобным сигналом, измерение дальности и скорости сближения ИРИ с летательным аппаратом, используя значения периодов повторения, невозможно.
Известен [8. Патент РФ №2444748, МПК G01S 5/02, опубл. 10.03.2012] способ определения дальности до излучающей обзорной радиолокационной станции, заключающийся в обнаружении и пеленговании сигналов радиолокационных станций (РЛС) радиопеленгатором, измерение параметров сигналов РЛС, времени прихода отдельных импульсов и их амплитуд, пачечных сигналов и периода сканирования антенны РЛС. Обнаружение сигналов дополнительным приемным пунктом, антенна которого образует с антенной пеленгатора измерительную базу, или дополнительным приемным пунктом, измерительную базу которого образуют за счет перемещения носителя радиопеленгатора, измерение параметров сигналов и их идентификация с сигналами, обнаруженными пеленгатором. При этом пачечные сигналы, обнаруженные пеленгатором и дополнительным приемным пунктом, нормируют по амплитуде и запоминают. По измеренным временным и нормированным амплитудным характеристикам пачек сигналов рассчитывают обусловленное проходом сканирующего луча антенны РЛС по измерительной базе время запаздывания между пачками сигналов как среднее значение временного интервала, который вычисляется в каждом периоде повторения сигналов РЛС, представляющее собой отношение разности времен прихода текущего и предыдущего импульсов одной пачки к разности их нормированных амплитуд, умноженное на разность нормированных амплитуд текущих импульсов обеих пачек сигналов. По найденному времени запаздывания между пачками сигналов и измеренному ранее периоду сканирования антенны РЛС определяют угол поворота антенны РЛС, соответствующий данной измерительной базе и дальности до РЛС. Вычисляют дальность до РЛС как отношение проекции измерительной базы на плоскость фронта приходящих сигналов от РЛС к углу поворота антенны РЛС, выраженному в радианах, при этом в случае установления промахов в определении дальности исключают их и повторяют вычисление времени запаздывания между пачками сигналов, угла поворота антенны РЛС и дальности до РЛС.
Однако данным способом определение дальности возможно только до сканирующей РЛС, работающей в режиме кругового обзора. При этом точность определения дальности данным способом зависит от величины измерительной базы и курса носителя.
В качестве прототипа выбран [см. 9. Патент РФ на изобретение №2406098, М. кл. G01S 3/00, опубл. 10.12.2010 г.] способ определения наклонной дальности до движущейся цели по минимальному числу пеленгов, в котором решена задача определения дальности до цели по измерениям пеленгов цели и мощности принятых колебаний, полученных в двух последовательных во времени отсчетах. При этом полагается, что цель движется прямолинейно и равномерно с априорно известной величиной скорости.
Данный способ включает в себя два последовательных во времени измерения пеленга сигнала, а также мощности данного сигнала. Далее с учетом априорно известной скорости сигнала и с использованием полученных измерений определяют дальность до движущейся цели.
Однако необходимое в прототипе знание априорной информации о скорости движения цели зачастую не приемлемо на практике.
Технический результат изобретения заключается в обеспечении возможности определения наклонной дальности до прямолинейно движущейся цели в отсутствии априорных данных о скорости ее движения путем двух последовательных измерений не только пеленгов (углов азимута) и мощностей, но и частот сигналов, принимаемых автономной угломерной однопозиционной системой.
Достижение указанного технического результата обеспечивается в предлагаемом способе определения наклонной дальности до движущейся цели, при котором совместно обрабатывают два последовательных во времени измерения пеленгов (углов азимута на цель β1 и β2) и мощностей сигналов Pc1 и Рс2, принимаемых автономной угломерной системой для рассматриваемых моментов измерений t1, t2, учитывая, что базовая точка измерения соответствует геометрическому центру автономной угломерной системы, а линия Ц1ЦN - траектория движения цели - соответствует точкам Ц1 и Ц2 измерения пеленга на цель в моменты времени t1 и t2, предполагая, что цель движется прямолинейно, при этом проходимое расстояние описывают моделью:  t≥t0, где:
t≥t0, где:  i! - переменная суммирования, являющаяся степенью полинома S(t) и имеющая смысл, например, координаты, скорости изменения координаты, ускорения, далее на основании полученных значений Pc1 и Рс2 вычисляют величину:
i! - переменная суммирования, являющаяся степенью полинома S(t) и имеющая смысл, например, координаты, скорости изменения координаты, ускорения, далее на основании полученных значений Pc1 и Рс2 вычисляют величину:  отличающемся тем, что дополнительно производят два последовательных измерения принятых сигналов частот f1, f2 в моменты времени измерений t1, t2 соответственно и на основании этих измерений определяют величину
отличающемся тем, что дополнительно производят два последовательных измерения принятых сигналов частот f1, f2 в моменты времени измерений t1, t2 соответственно и на основании этих измерений определяют величину  а на основании измеренных углов азимута β1, β2 определяют Δβ21=β2-β1, после чего определяют дальность до цели по формуле:
а на основании измеренных углов азимута β1, β2 определяют Δβ21=β2-β1, после чего определяют дальность до цели по формуле:  где с - скорость света, а Т=Δt12.
где с - скорость света, а Т=Δt12.
Достижение указанного технического результата предлагаемыми отличиями можно пояснить с использованием геометрии задачи, представленной на фиг. 1, где точка 0 соответствует геометрическому центру автономной угломерной системы, Ц1ЦN - линия перемещения цели, точки Ц1 и Ц2 соответствуют измерениям углов азимута на цель β1 и β2, мощностей PC1 и РС2, и частот f1 и f2 колебаний в моменты времени t1 и t2 соответственно. Кроме того, на фиг. 1 указаны расстояния 
 углы азимута β1 и β2, курсовые углы θ1 и θ2, вектор скорости цели - V, курсовой параметр цели - Р и дальности до курсового параметра в моменты времени t1 и t2 - S1 и S2 - соответственно.
углы азимута β1 и β2, курсовые углы θ1 и θ2, вектор скорости цели - V, курсовой параметр цели - Р и дальности до курсового параметра в моменты времени t1 и t2 - S1 и S2 - соответственно.
Предполагается, что цель - источник радиоизлучения - движется прямолинейно, при этом проходимое расстояние описывается моделью:
 где:
где: 
По теореме косинусов из треугольника 0Ц1Ц2 выразим дальность на момент первого измерения  учитывая, что:
учитывая, что:  получим:
получим:

Выразим величину ΔS=S1-S2=VΔt12=VT как:

Примем, что в моменты времени t1 и t2 измеряется частота сигнала источника радиоизлучения, которая определяется зависимостью:

где: ƒ0 - несущая частота разведываемого средства; FR1, FR2 - доплеровская частота на момент первого и второго измерения;  ,
,  - радиальная скорость цели на момент первого и второго измерения, c - скорость света.
- радиальная скорость цели на момент первого и второго измерения, c - скорость света.
Отношение частот колебаний равно:

Учитывая, что дальности до цели в соответствующие моменты времени определяются как:

и дифференцируя (6) по времени, полагая, что  и
и  , и учитывая, что цель летит равномерно и прямолинейно на постоянной высоте, т.е. P=const, а
, и учитывая, что цель летит равномерно и прямолинейно на постоянной высоте, т.е. P=const, а  , получим выражения для радиальной скорости на момент первого и второго измерения:
, получим выражения для радиальной скорости на момент первого и второго измерения:

Выразим радиальную скорость цели на момент первого измерения:

На основании (2), (3), (5) и (7)-(8) получим систему уравнений:



Известно [см. например 10. Справочник по радиолокации: перевод с английского. Под ред. К.Н. Трофимова. Том №4. М.: Сов. радио, 1976], что мощность Pc=Pc(t) сигнала на входе автономной угломерной системы обратно пропорциональна квадрату дальности R=R(t) до цели: Pc=µR-2, где µ=µ(t) - коэффициент пропорциональности, сложным образом зависящий от условий наблюдения цели.
За промежуток времени Δt12=T мощность принимаемых сигналов на входе автономной угломерной системы меняется от величины Pc1=Pc(t1) до величины Pc2=Pc(t2), поэтому справедливы соотношения


Поскольку на практике для малых временных интервалов Δt12=T, принимается ограничение µ1=µ2=µ, тогда получим следующую формулу для отношения дальностей

Откуда выразим дальность на момент первого измерения:

С учетом (15) запишем (9)-(11) как:



Из выражений (16)-(18) получим формулу для дальности на момент второго измерения:

Таким образом, с помощью дополнительного измерения частот принимаемого сигнала и полученного выражения, можно рассчитать наклонную дальность до источника движущейся цели без априорных данных о скорости ее движения.
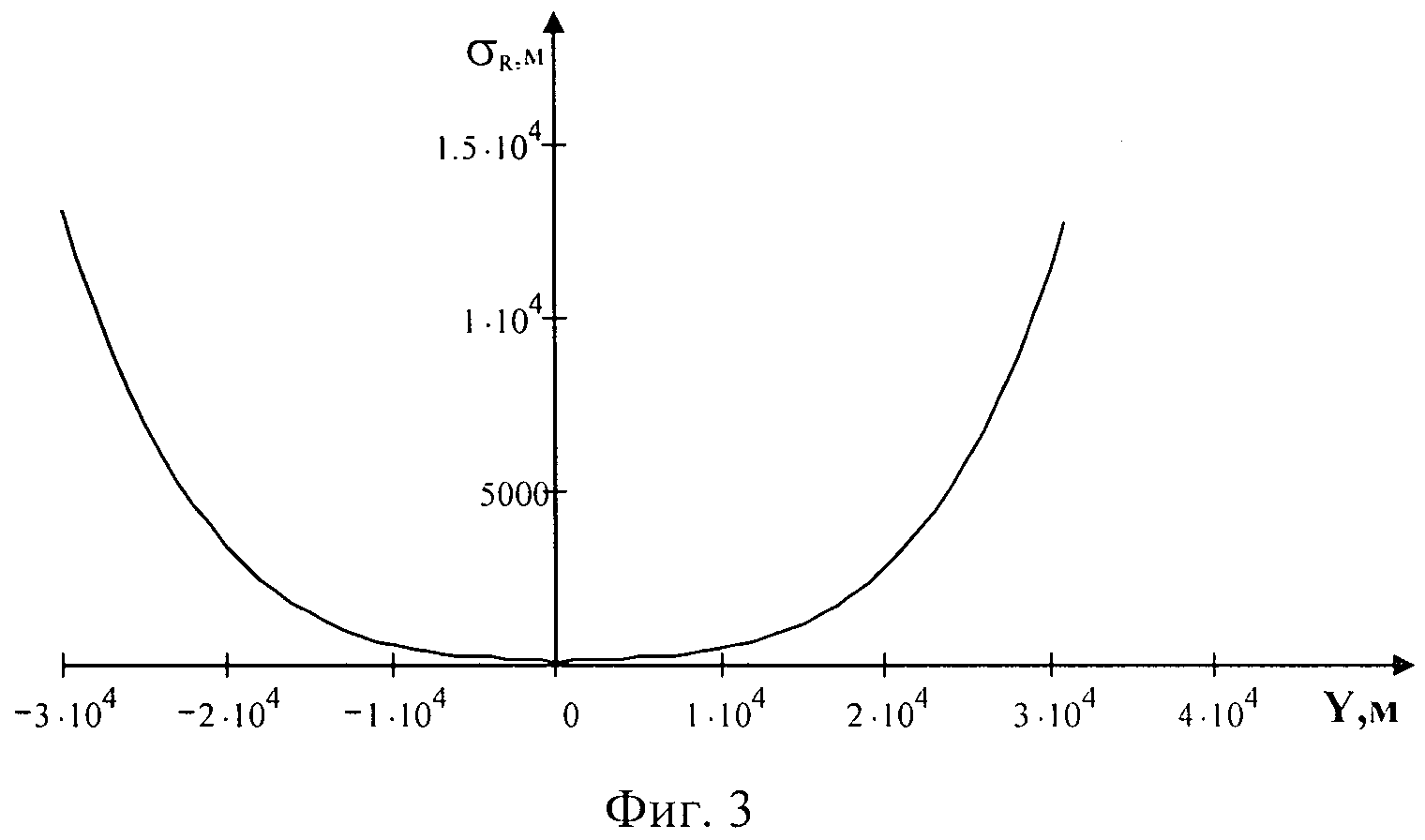
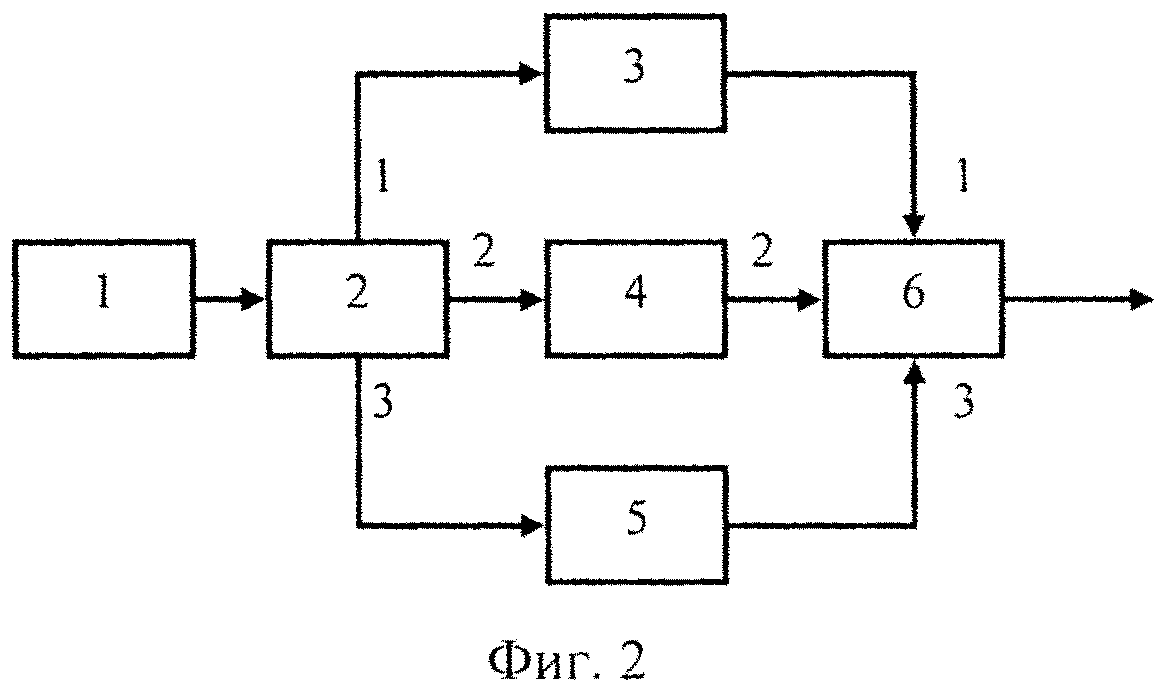
Предлагаемый способ поясняется чертежами, где на фиг. 1 приведена геометрическая интерпретация задачи определения параметров движения объекта, на фиг. 2 приведен пример устройства для реализации предлагаемого способа, на фиг. 3, 4 показана среднеквадратическая ошибка определения дальности предлагаемым способом для разных дальностей до объекта.
Согласно фиг. 2 устройство для реализации предлагаемого способа содержит:
1 - антенну;
2 - приемное устройство;
3 - измеритель мощности;
4 - угломерное устройство;
5 - измеритель частоты;
6 - вычислительное устройство.
При этом выход антенны 1 соединен со входом приемного устройства 2, первый выход которого соединен со входом измерителя 3 мощности, второй выход соединен со входом угломерного устройства 4, третий выход соединен со входом измерителя 5 частоты, а выход измерителя 3 мощности, угломерного устройства 4 и измерителя 5 частоты соединены соответственно с первым, вторым и третьим входами вычислительного устройства 6, выход которого является выходом системы.
Предлагаемый способ осуществляется данным устройством следующим образом: принятые антенной 1 колебания радиочастоты канализируются в приемное устройство 2, где осуществляется процедура обнаружения и усиления сигналов до требуемого уровня.
С первого выхода приемного устройства 1 сигналы поступают на измеритель 3 мощности, где формируется оценка мощности принятого сигнала.
Со второго выхода приемного устройства 1 сигналы поступают на угломерное устройство 4, где формируется оценка азимута объекта.
С третьего выхода приемного устройства 1 сигналы поступают на измеритель 5 частоты, где формируется оценка частоты принятых колебаний.
Вычислительное устройство 6 задерживает на величину Δt12=T оценки принятой мощности РC1, РC2, частоты ƒ1, ƒ2, углов азимута β1, β2, полученные в моменты времени t1 и t2 соответственно. На основании полученных оценок вычисляются величины 
 и Δβ21=β2-β1, на основании чего вычисляется дальность до цели по формуле:
и Δβ21=β2-β1, на основании чего вычисляется дальность до цели по формуле:

Рассмотрим пример выполнения блоков устройства для реализации предлагаемого способа.
Антенна 1 может быть выполнена как в [11. Бакулев П.А., Радиолокационные системы - М.: Радиотехника, 2004, 320 с. рис. 11.12 стр. 261].
Приемное устройство 2 может быть выполнено как в [12. Проектирование радиоприемных устройств под ред. Сиверса А.П. М.: «Сов. радио», 1976 г. стр. 68 рис. 2.25, 485 с.].
Измеритель 3 мощности может быть выполнен на основе измерителей мощности фирмы Rohde & Schwarz [13. Двухканальный измеритель мощности httphttp://www.rohde-schwarz.ru/products/test_and_measurement/power_volt_meter/NRVD/,] либо на основе [см. 14. Патент РФ №2472167, MПK G01R 29/26, опубл. 10.01.2013] Цифровой измеритель мощности сигнала и мощности помехи в полосе пропускания канала радиоприемника в реальном масштабе времени.
Угломерное устройство 4 может представлять собой фазометр [15. Теоретические основы радиолокации. Под. ред. Ширмана Я.Д. М.: «Советское радио» 1970, 560 стр. стр. 300 рис. 5.65.], при использовании амплитудного моноимпульсного метода угломерное устройство 4 может быть выполнено на основе схемы сравнения амплитуд или схемы вычитания [16. Теоретические основы радиолокации. Под ред. Ширмана Я.Д. М.: «Советское радио» 1970, 560 стр., стр. 297 рис. 5.62.].
Измеритель 5 частоты может быть выполнен на основе известных устройств, например [см. 17. Патент РФ №2210785, МПК 7 G01R 23/10. Цифровой частотомер. Опубл. 20.08.2003], или в виде программируемого частотомера НМ8123 [см. 18. httphttp://www.rohdeschwarz].
Вычислительное устройство 6, реализующее вычислительные процедуры, может быть выполнено как в [19. Патент на полезную модель РФ №72339, МПК G06F 15/16 опубл. 10.04.2008].
Используемые в изобретении блоки могут быть выполнены на основе стандартных, типовых радиотехнических элементов.
Ошибку измерения дальности от основных параметров, входящих в формулы для определения дальности, получим на основании теоремы о линеразации функции нескольких случайных аргументов. При этом предположим, что ошибки измерения подчиняются нормальному закону распределения и являются некоррелированными:

Зададимся следующей моделью движения цели:  ,
,  ,
,  ,
,  ,
,  , Х01=10000 м, X02=20000 м, Х03=30000 м, Y=30000 м, T=Δt21=10 сек.
, Х01=10000 м, X02=20000 м, Х03=30000 м, Y=30000 м, T=Δt21=10 сек.
На фиг. 3 представлен график зависимости σR2 для Y=30000 и Х01=10000.
На фиг. 4 представлен график зависимости σR2 для Y=30000 и Х02=20000.
На фиг. 5 представлен график зависимости σR2 для Y=30000 и Х03=30000.
Причем σQ21=0.009, σΔβ21=5 угл. с,  .
.
Современные станции радиоконтроля обладают высокой точностью измерения частоты. Так в [20. Стационарная СРК «ИРГА» httphttp://irga.sut.ru/irga.html] приведены следующие характеристики: погрешность измерения частоты f смодулированного сигнала при уровне сигнала на входе измерительного РПУ не менее 10 мкВ в диапазоне частот 0,1-30 МГц не хуже ±1 Гц. Погрешность измерения частоты немодулированного сигнала при отношении сигнал/шум более 20 дБ в диапазоне частот 30-3000 МГц не хуже ±(7·10-9+1/(f·T)), где f - измеренное значение частоты, Гц; T - время измерения частоты, с.
Приборы фирмы Rohde & Schwarz обеспечивают разрешение по частоте порядка Δf=1 Гц [21. Модель Rohde & Schwarz FS300 httphttp://semicon.ru/chastotoiTieri/rohde-schwarz-fs300.htinll].
Способ определения наклонной дальности до движущейся цели, при котором совместно обрабатывают два последовательных во времени измерения пеленгов (углов азимута на цель β и β) и мощностей сигналов Pc1 и Рс2, принимаемых автономной угломерной системой для рассматриваемых моментов измерений t, t, учитывая, что базовая точка измерения соответствует геометрическому центру автономной угломерной системы, а линия ЦЦ - траектория движения цели - соответствует точкам Ц и Ц измерения пеленга на цель в моменты времени t и t, предполагая, что цель движется прямолинейно, при этом проходимое расстояние описывают моделью: где: i! - переменная суммирования, являющаяся степенью полинома S(t) и имеющая смысл, например, координаты, скорости изменения координаты, ускорения, далее на основании полученных значений Pc1 и Рс2 вычисляют величины: отличающийся тем, что дополнительно производят два последовательных измерения принятых сигналов частот f, f в моменты времени измерений t, t соответственно и на основании этих измерений определяют величину а на основании измеренных углов азимута β, β определяют Δβ=β-β, после чего определяют дальность до цели по формуле: , где с - скорость света, а Т=Δt, t.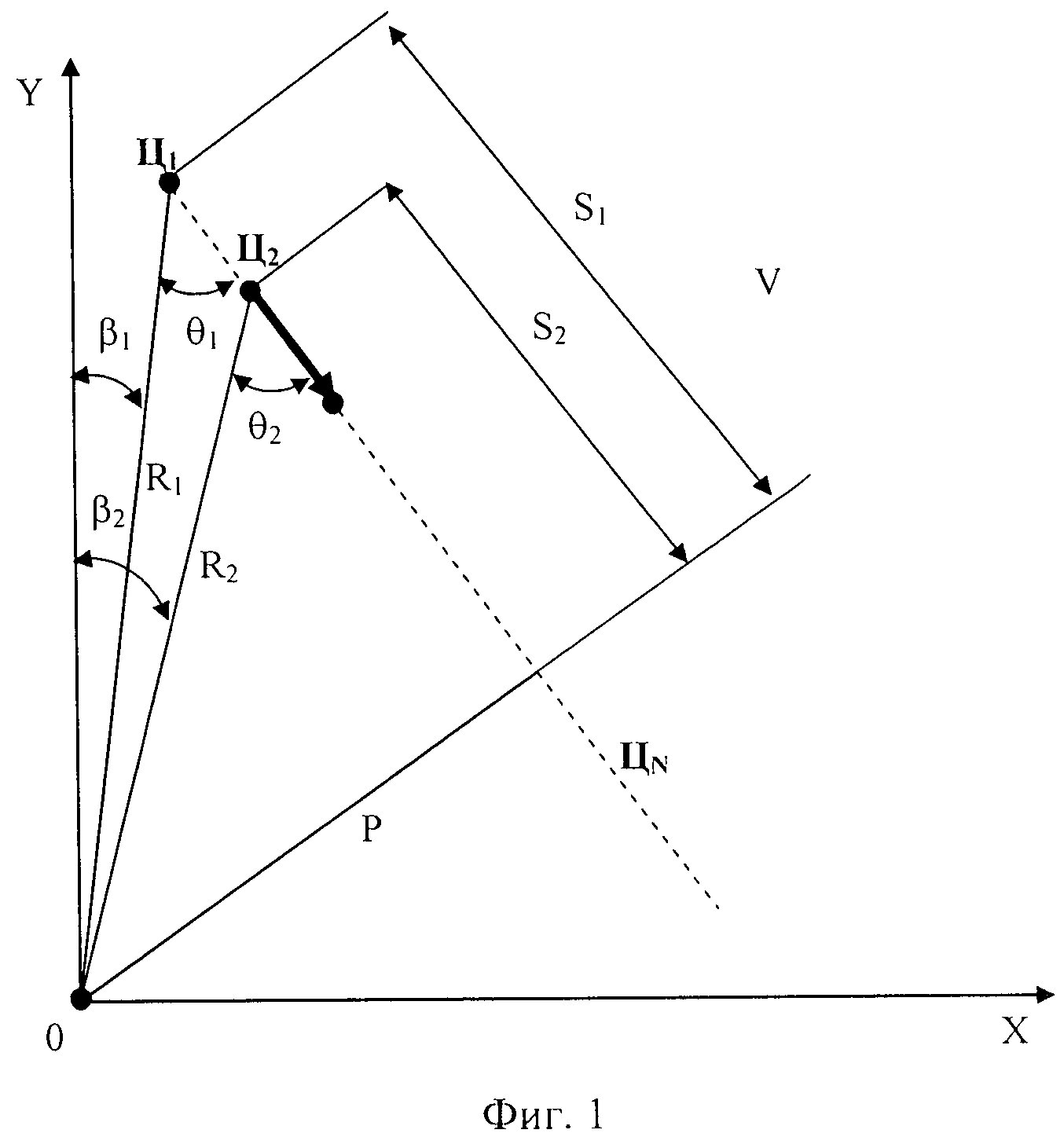

Всенаправленная антенна излучения
Устройство акустического представления пространственной информации для пользователей
Устройство для определения параметров движения цели
Адаптивное устройство разделения неортогональных цифровых сигналов двоичной фазовой манипуляции
Устройство для образования скважин в грунте ударным способом
Способ измерения установившегося после включения питания значения постоянного электрического сигнала на выходе измерительного преобразователя
Способ акустического представления пространственной информации для пользователей
Устройство для определения параметров движения объекта
Способ формирования заверенного цифровым водяным знаком цветного электронного изображения
Способ аутентификации пользователей с защитой от подсматривания
Всенаправленная антенна излучения
Устройство акустического представления пространственной информации для пользователей
Устройство для определения параметров движения цели
Адаптивное устройство разделения неортогональных цифровых сигналов двоичной фазовой манипуляции
Устройство для образования скважин в грунте ударным способом
Способ измерения установившегося после включения питания значения постоянного электрического сигнала на выходе измерительного преобразователя
Способ акустического представления пространственной информации для пользователей
Устройство для определения параметров движения объекта
Способ формирования заверенного цифровым водяным знаком цветного электронного изображения
Способ аутентификации пользователей с защитой от подсматривания

