Результат интеллектуальной деятельности: ПОСАДОЧНЫЙ РАДИОЛОКАТОР
Вид РИД
Изобретение
Изобретение относится к радиолокационным средствам автоматизированных систем управления полетами и посадкой воздушных судов (ВС) в аэродромной зоне, использующим первичные средства радиолокации с формированием и излучением высокочастотных зондирующих импульсов, последующим приемом и обработкой радиолокационных сигналов, отраженных от ВС и других воздушных объектов.
Известны посадочные радиолокаторы (ПРЛ) для управления полетами и посадкой ВС в аэродромной зоне: ПРЛ-4 [1], РП-3Г [2], ПРЛ радиолокационных систем посадки (РСП) РСП-6М2 [3] и РСП-7 [4], посадочный канал радиолокационного комплекса AN/TPN-31[5], ПРЛ PAR 2090С [6] и посадочный радиолокатор RP-5M [7].
Посадочные радиолокаторы ПРЛ-4 [1] и РП-3Г [2], а также ПРЛ радиолокационных систем посадки РСП-6М2 [3] и РСП-7 [4] разработаны с использованием зеркальных антенн с механическим сканированием (обзором), позволяют осуществлять равномерный последовательный обзор воздушного пространства и наблюдение ВС в контролируемой воздушной зоне, а также совместно с другими радиотехническими средствами участвуют в обеспечении посадки ВС на взлетно-посадочную полосу (ВПП) аэродрома. Недостатком данных ПРЛ является громоздкость конструкции, низкая эксплуатационная технологичность, практическая невозможность их серийного изготовления (ввиду морального устаревания элементной базы и материалов), низкая надежность, а также несоответствие точности измерения основных параметров положения (координат) и движения ВС требованиям современных нормативных документов РФ [8] и мировых стандартов. Другим недостатком данных ПРЛ является отсутствие возможности организации квазислучайного обзора пространства (неравномерного в плоскости сканирования) с реализацией режима обнаружения и сопровождения ВС с укороченным (по сравнению с периодом обзора) интервалом обновления информации, позволяющим улучшить его энергетические и точностные характеристики.
Посадочный канал радиолокационного комплекса AN/TPN-31 [5] разработан с использованием неподвижных курсовой и глиссадной активных антенных решеток (АР) на базе активных приемо-передающих модулей и позволяет наряду с последовательным обзором осуществлять квазислучайный обзор воздушного пространства, предоставляющий возможность организации режима обнаружения и сопровождения ВС в любом произвольном направлении с меняющимся и укороченным периодом обновления информации. Недостатком данного посадочного канала является его высокая стоимость, обусловленная использованием в АР дорогих активных приемо-передающих модулей, и отсутствие возможности оперативной смены направления посадки вследствие наличия одной неподвижной комбинированной глиссадно-курсовой антенны, ориентированной вдоль только одного из двух возможных противоположных направлений посадки ВС на ВПП.
Посадочный радиолокатор PAR 2090С [6] разработан с применением независимых курсовой и глиссадной пассивных антенных решеток, устанавливаемых в заданном направлении путем разворота с использованием соответствующих опорно-поворотных устройств и выполняющих механическое сканирование зоны обзора. Недостатком ПРЛ PAR 2090С является механическое движение антенн при сканировании, что снижает надежность ПРЛ и не позволяет организовать квазислучайный обзор пространства для реализации режима обнаружения и сопровождения ВС с укороченным периодом обновления информации. Другим недостатком ПРЛ PAR 2090С является сложность конструктивного исполнения, предполагающего размещение аппаратуры ПРЛ в двух контейнерах.
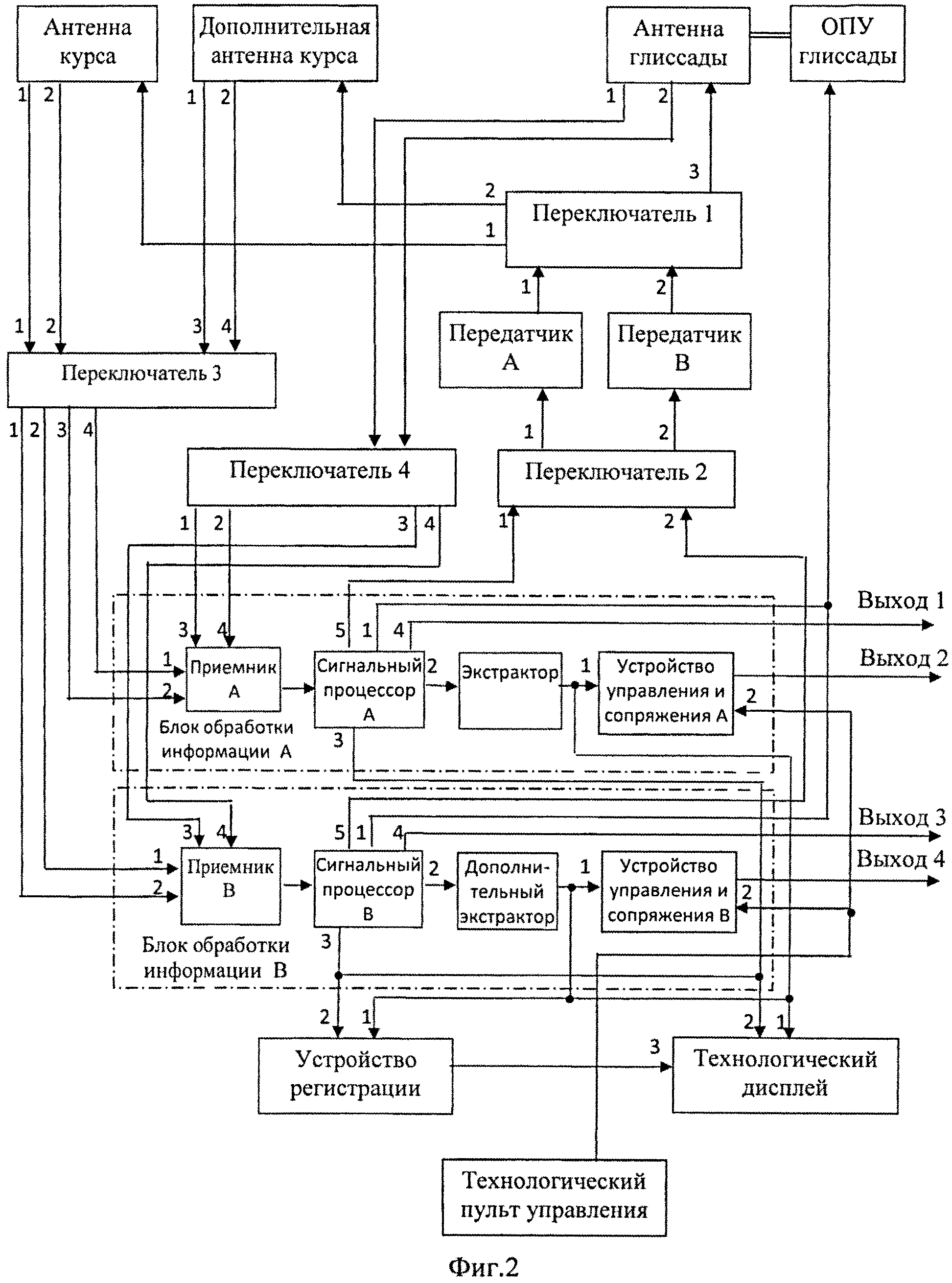
Наиболее близким по технической сущности к предлагаемому ПРЛ является ПРЛ RP-5M (фиг.1) [7] (прототип), используемый в современных системах управления воздушным движением для обнаружения и контроля за полетом ВС на траектории захода на посадку.
ПРЛ RP-5M содержит два идентичных приемо-передающих канала А и В, каждый из которых состоит из передатчика, циркулятора, приемника и сигнального процессора, а также зеркальные антенны курса и глиссады, перемещаемые в заданном секторе пространства с помощью соответственно опорно-поворотных устройств, переключатель приемо-передающих трактов каналов А и В, экстрактор, технологический дисплей и устройство регистрации.
Недостатком ПРЛ RP-5M является использование зеркальных антенн с механическим равномерным сканированием зоны обзора и поворотом антенн на заданное направление посадки, что снижает показатели надежности ПРЛ и не позволяет организовать квазислучайный обзор контролируемого воздушного пространства, обеспечивающий режим сопровождения ВС с укороченным периодом обновления информации. Кроме того, в ПРЛ используется традиционный метод обнаружения и измерения координат ВС по огибающей пакета эхо-сигналов, последовательно принимаемых от ВС в пределах монотонно сканирующей ДН антенны, что приводит к возникновению ошибок измерения координат при флюктуациях или пропадании отдельных импульсов пакета и не позволяет сократить время, необходимое для обнаружения и измерения параметров положения и движения ВС.
Цель изобретения - повышение надежности функционирования, оперативности наблюдения, энергетических и точностных характеристик ПРЛ.
Поставленная цель достигается заменой в прототипе механически перемещаемых зеркальных антенн с соответствующими опорно-поворотными устройствами на две неподвижные пассивные моноимпульсные курсовые АР, ориентированные на противоположные направления посадки, одну пассивную моноимпульсную глиссадную АР, устанавливаемую на заданное направление посадки путем соответствующего поворота в горизонтальной плоскости, и введением режима оперативного квазислучайного обзора воздушного пространства благодаря использованию частотного сканирования и моноимпульсной обработки отраженных радиолокационных эхо-сигналов.
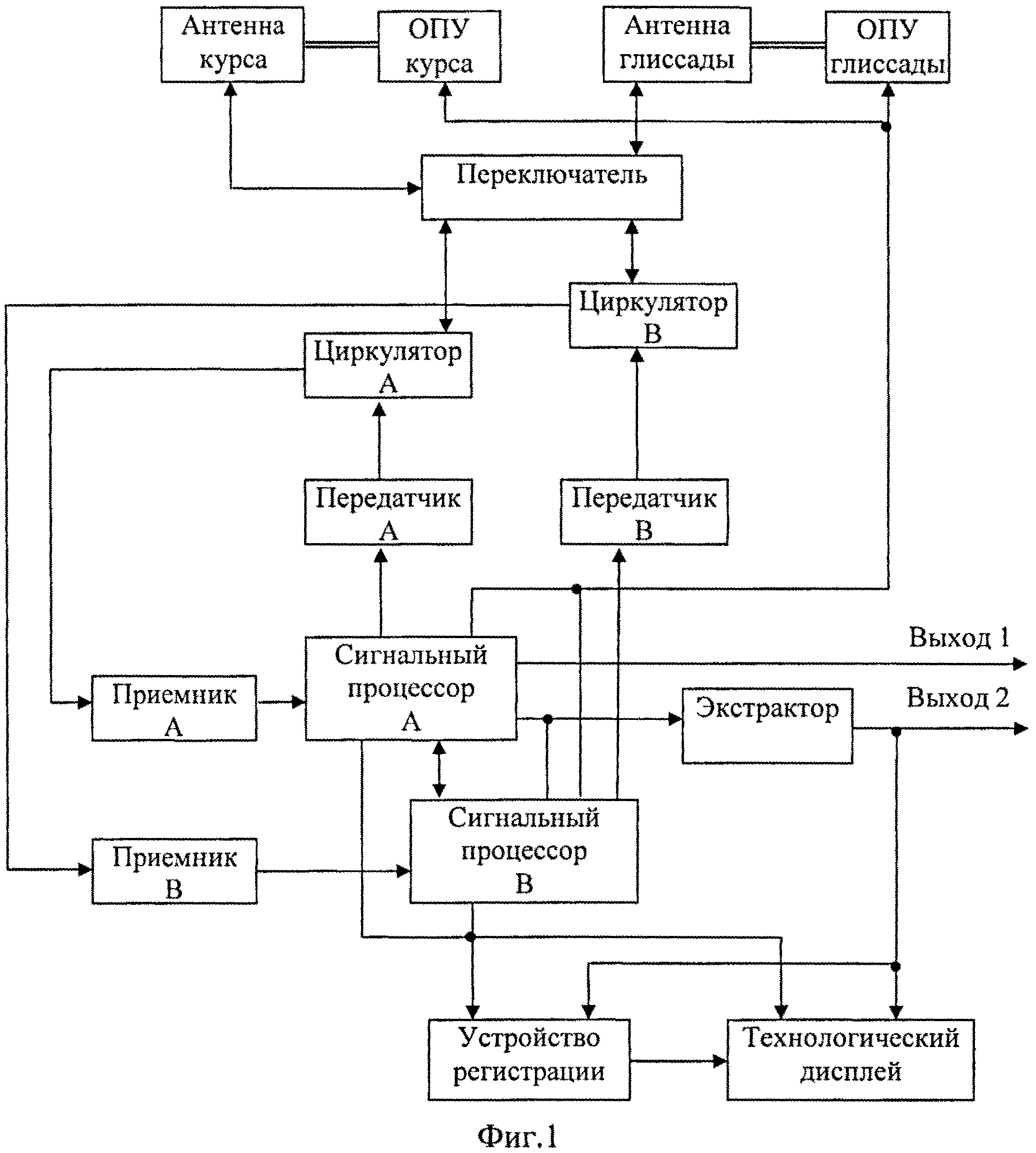
На фиг.2 представлена функциональная схема предлагаемого ПРЛ.
ПРЛ содержит два идентичных приемо-передающих канала А и В, каждый из которых состоит из передатчика, приемника, сигнального процессора, причем в каждом канале выход приемника соединен со входом сигнального процессора, а также антенну курса, антенну глиссады, опорно-поворотное устройство глиссады, на котором устанавливается антенна глиссады и управляющий вход которого подключается к соединенным вместе выходам 1 сигнальных процессоров А и В, экстрактор, вход которого соединен с выходом 2 сигнального процессора канала А, технологический дисплей и устройство регистрации, входы 1 которых соединены и подключены к выходу экстрактора, а входы 2 соединены и подключены к соединенным вместе выходам 3 сигнальных процессоров А и В, выход 4 сигнального процессора А является выходом 1 ПРЛ, дополнительную антенну курса, дополнительный экстрактор, переключатели 1, 2, 3 и 4, устройства управления и сопряжения каналов А и В, а также технологический пульт управления, причем входы антенны курса, дополнительной антенны курса и антенны глиссады соединены соответственно с выходами 1, 2 и 3 переключателя 1, входы 1 и 2 которого соединены соответственно с выходами передатчиков А и В, входы которых подключены соответственно к выходам 1 и 2 переключателя 2, входы которого 1 и 2 соединены соответственно с выходами 5 сигнальных процессоров А и В, выходы 1 и 2 антенны курса подключены соответственно ко входам 1 и 2 переключателя 3, входы которого 3 и 4 соединены с выходами 1 и 2 дополнительной антенны курса, а выходы 1, 2, 3 и 4 подключены соответственно ко входам 1 и 2 приемника А и входам 1 и 2 приемника В, выходы 1 и 2 антенны глиссады подключены соответственно ко входам 1 и 2 переключателя 4, выходы которого 1, 2, 3 и 4 подключены соответственно ко входам 3 и 4 приемника А и входам 3 и 4 приемника В, выходы экстрактора и дополнительного экстрактора соединены вместе и подключены к соединенным вместе входам 1 устройств управления и сопряжения А и В, а также к входам 1 устройства регистрации и технологического дисплея, входы 2 устройств управления и сопряжения соединены вместе и подключены к выходу технологического пульта управления, выход 4 сигнального процессора В является выходом 3 ПРЛ, а выходы устройств управления и сопряжения А и В являются соответственно выходами 2 и 4 ПРЛ.
Антенна курса, дополнительная антенна курса и антенна глиссады содержат по одной передающей антенне и по две идентичные приемные антенны, обеспечивающие реализацию амплитудного моноимпульсного метода обнаружения и оценки координат ВС.
Антенны курса и глиссады, ориентированные на противоположные направления посадки, неподвижны при обзоре, причем каждая из приемных и передающих антенн, входящих в состав антенн курса и глиссады, выполнена в виде антенной решетки, вибраторы которой подключены к замедляющей волноводной линии, имеющей один запитывающий конец и реализующей равномерное периодическое или квазислучайное сканирование антенного луча в пределах зоны обзора путем соответствующего изменения несущей частоты сигналов.
Аппаратура приема и обработки сигналов каналов А и В, включающая приемник, сигнальный процессор, экстрактор и устройство управления и сопряжения, выполнена в виде двух автономных блоков обработки информации А и В.
ПРЛ содержит дублированные каналы передачи данных на выносной диспетчерский пункт управления воздушным движением в виде широкополосной линии передачи информации и узкополосной линии передачи данных.
В целом введение дополнительной неподвижной антенны курса, дополнительного экстрактора, переключателей 1-4, устройств управления и сопряжения каналов А и В, а также пульта технологического управления позволяет повысить надежность функционирования, оперативность наблюдения, а также энергетические и точностные характеристики ПРЛ.
Работа предлагаемого посадочного радиолокатора состоит в следующем.
В основу работы ПРЛ положено использование двух независимых идентичных приемо-передающих каналов А и В, каждый из которых обеспечивает реализацию алгоритма амплитудного моноимпульсного измерения координат ВС. В ходе штатной работы с целью достижения максимального энергетического потенциала в ПРЛ используются одновременно оба передатчика А и В, а также приемник, сигнальный процессор и экстрактор одного из приемных каналов А или В, причем каждый из приемных каналов является четырехканальным и выполняет одновременную обработку радиолокационных сигналов, поступающих с выходов 1 и 2 антенны курса или дополнительной антенны курса и с выходов 1 и 2 антенны глиссады.
Каждая из антенн курса и глиссады состоит из одной передающей антенны и двух приемных антенн. Вход передающей антенны является входом антенн курса и глиссады, а выходы приемных антенн являются выходами 1 и 2 антенн.
При помощи переключателя 1 передатчик А подсоединяется ко входу одной из антенн курса, ориентированной на выбранное направление посадки, а передатчик В к антенне глиссады или наоборот. В случае выхода одного из передатчиков из строя данный передатчик отключается, и ПРЛ на время ремонта неисправного передатчика переходит на резервный экономичный режим работы только с одним исправным передатчиком. Для этого при помощи переключателя 1 выполняется подключение выхода исправного передатчика одновременно ко входам работающей антенны курса и антенны глиссады.
На выходах 5 сигнальных процессоров А и В формируются высокочастотные зондирующие импульсы (ЗИ) низкого уровня мощности, которые поступают соответственно на входы 1 и 2 переключателя 2. На выходы 1 и 2 переключателя 2 поступает один из входных ЗИ, который далее с указанных выходов поступает на входы соответственно передатчиков А и В. Таким образом переключатель 2 обеспечивает одновременную работу передатчиков А и В.
В ПРЛ антенны курса и глиссады имеют ортогональные поляризационные свойства: антенна курса и дополнительная антенна курса являются горизонтально поляризованными, а антенна глиссады имеет вертикальную поляризацию. Благодаря этому, отраженные радиолокационные сигналы, одновременно принимаемые по каналам курса и глиссады, в ПРЛ будут иметь энергетическую развязку по поляризации. При этом обеспечивается практическое отсутствие взаимных помех между курсовым и глиссадным каналами при одновременной работе антенн курса и глиссады на излучение и прием отраженных сигналов на близких или даже равных несущих частотах.
С помощью антенны курса для одного направления посадки или дополнительной антенны курса для противоположного направления посадки и антенны глиссады, устанавливаемой в заданное направление посадки при помощи опорно-поворотного устройства глиссады, производится одновременный секторный обзор пространства соответственно в азимутальной (горизонтальной) и угломестной (вертикальной) плоскостях с центром в месте расположения ПРЛ вдоль ВПП аэродрома.
Обзор пространства в отличие от прототипа производится не с помощью механического равномерного циклического движения антенн курса и глиссады в пределах заданных секторов, а с использованием неподвижных антенн, что повышает эксплуатационную надежность антенн и ПРЛ в целом.
Перемещение антенного луча в пространстве при неподвижных антеннах обеспечивается за счет реализации алгоритма частотного сканирования путем дискретного изменения несущей частоты зондирующих импульсов и соответствующего изменения частоты гетеродинов приемников по определенному периодическому (при равномерном обзоре) или квазислучайному (при поиске ВС в направлении их наиболее вероятного появления или их сопровождении) закону.
Максимальный сигнал, излучаемый антенной, зависит от фазового сдвига φ между вибраторами передающей антенны и соответствует направлению αo, удовлетворяющему условию [9]

где b - расстояние между вибраторами антенны; λ - длина волны излучаемых сигналов (λ=c/ƒ, где с - скорость распространения электромагнитных волн в воздушном пространстве, ƒ - частота),
так как сигналы, излучаемые в этом направлении отдельными вибраторами, будут суммироваться в фазе и создадут максимальную напряженность электромагнитного поля.
Аналогично принимаемые колебания создадут в этом направлении максимальную интенсивность входного радиолокационного сигнала, отраженного от воздушных объектов, на выходе приемной антенны.
В антеннах используется способ электрического частотного сканирования антенного луча посредством перестройки частоты ƒ сигнала и питания вибраторов антенной решетки от замедляющей волноводной линии с одного конца. Набег фазы от вибратора к вибратору определяется длиной L отрезка питающего замедляющего волновода между соседними вибраторами

где λв - длина волны, распространяющейся в замедляющей волноводной линии (λв=cв/ƒ, где св - скорость распространения электромагнитных волн в волноводной линии).
При излучении зондирующих импульсов за счет изменения частоты передатчика меняется λв и φ согласно (2), благодаря чему происходит сканирование луча по углу αo с учетом (1) в соответствии с формулой

Частотное сканирование путем скачкообразной перестройки частоты обеспечивает возможность в соответствии с (1)-(3) практически мгновенно изменить направление расположения максимума диаграммы направленности антенны в плоскости сканирования и оставаться в этом направлении в течение произвольного времени. Такой режим квазислучайного обзора позволяет повысить оперативность наблюдения, а также энергетический потенциал и соответственно точностные характеристики ПРЛ по сравнению с режимом циклического равномерного обзора.
При равномерном обзоре с периодом То эффективное число интегрируемых импульсов, определяющих энергетический потенциал ПРЛ, зависит от угловой скорости перемещения антенного луча Ω в пределах зоны обзора Δα, эффективной ширины диаграммы направленности θ и частоты повторения Fп зондирующих импульсов ПРЛ [9]

При квазислучайном обзоре эффективное число интегрируемых импульсов когерентно-импульсного ПРЛ определяется периодом обзора и заданным максимальным количеством ВС m, которые должны быть обнаружены в пределах зоны обзора и взяты на сопровождение

Выигрыш квазислучайного режима обзора относительно равномерного обзора в эффективном числе интегрируемых импульсов с учетом (4) и (5) определяется выражением

При нормативных величинах параметров, входящих в выражение (5), m=10, Δα=35 град и θ=1,2 град (для азимутальной плоскости сканирования), из последнего выражения получим Nк/Nр=~6. Следовательно, при такой организации квазислучайного режима обзора энергетический потенциал ПРЛ повышается в ~6 раз.
Таким образом, переход на квазислучайный режим обзора позволяет в зависимости от заданного количества обслуживаемых ВС получить существенный выигрыш в эффективном числе интегрируемых импульсов и соответственно в энергетическом потенциале ПРЛ.
Повышение энергетического потенциала позволяет улучшить точностные характеристики ПРЛ, зависящие от отношения А амплитуды сигнального импульса длительностью τ к среднеквадратическому значению шума и числа Nк:
- потенциальную точность измерения дальности, определяемую величиной потенциальной среднеквадратической ошибки измерения дальности [9]

- потенциальную точность измерения угловых координат, определяемую величиной потенциальной среднеквадратической ошибки измерения угла [9]

Как следует из выражений (6) и (7), увеличение эффективного числа интегрируемых импульсов Nк, достигаемое при квазислучайном режиме обзора ПРЛ, обеспечивает уменьшение величин σд и σу, то есть повышает точностные характеристики ПРЛ.
Формирование зондирующих импульсов, величина несущей частоты которых устанавливается в зависимости от требуемого направления αо излучения и приема отраженных радиолокационных сигналов, производится в высокочастотном формирователе одного из выбранных для работы сигнальных процессоров А или В. При помощи переключателя 2 высокочастотные зондирующие импульсы направляются на входы передатчиков А и В, где они усиливаются по мощности. Выходные импульсные сигналы передатчиков через переключатель 1 направляются ко входам антенн курса и глиссады для излучения в пространство.
Радиолокационные сигналы, являющиеся результатом отражения зондирующих импульсов от воздушных судов и других объектов, через рабочую антенну курса и антенну глиссады поступают соответственно на переключатель 3 и переключатель 4. С выхода переключателя 3 сигналы курса, а с выхода переключателя 4 сигналы глиссады поступают на соответствующие входы приемника А, если работает канал А, или на входы приемника В, если для работы выбран канал В. Выходные сигналы приемника на промежуточной частоте поступают в сигнальный процессор, где производится их аналого-цифровое преобразование, когерентная межпериодная частотная фильтрация на фоне шумов и пассивных помех, выполняется процедура обнаружения по критерию Неймана-Пирсона, обеспечивающему получение максимальной вероятности правильного обнаружения ВС при фиксированной вероятности ложных тревог по шумам и остаткам пассивных помех, временная взвешенная обработка, а также формирование плотов и оценка сферических координат (дальность, азимут и угол места) ВС.
В каналах А и В приемник, сигнальный процессор, экстрактор и устройство управления и сопряжения объединены в блоки обработки информации А и В, образуя дублированную аппаратура приема и обработки сигналов основного и резервного каналов.
На выходах 1-4 ПРЛ обеспечивается формирование дублированных каналов передачи данных на выносной командный диспетчерский пункт (КДП) управления воздушным движением в виде широкополосных линий передачи информации (Выходы 1 и 3) и узкополосных линий передачи данных (Выходы 2 и 4).
Переход на работу с одним каналом аппаратуры А или В при выходе из строя аппаратуры другого канала может производиться автоматически или вручную с технологического пульта управления ПРЛ или с рабочего места диспетчера на КДП в зависимости от состояния и режима эксплуатации ПРЛ.
Разработан и изготовлен опытный образец ПРЛ, успешно проведены его заводские и полигонные государственные испытания. Готовится запуск серийного производства ПРЛ.
Эффективность ПРЛ подтверждена положительными результатами полигонных государственных испытаний опытного образца, показавшими, что построение ПРЛ на базе недорогих пассивных неподвижных антенных решеток с равномерным и квазислучайным частотным сканированием антенного луча, предусматривающим моноимпульсную обработку отраженных радиолокационных сигналов, позволяет повысить надежность функционирования, оперативность наблюдения, энергетические и точностные характеристики ПРЛ.
Литература
1. Описание ПРЛ-4 [он-лайн, найдено в Интернете на http://hist.rloc.ru/lobanov/6_16_5.htm].
2. Описание ПРЛ-ЗГ найдено в монографии «П.С. Давыдов, А.А. Сосновский, И.А. Хаймович. Авиационная радиолокация. Справочник. /Под ред. П.С.Давыдова. - М., изд-во «Транспорт», 1984 г. (с.125)».
3. Описание РСП-6М2 [он-лайн, найдено в Интернете на http://www.eandc.ru/news/detail.php?ID=18434 или на http://www.tc-alet.ru/Produksia7.html].
4. Описание РСП-7 [он-лайн, найдено в Интернете на http://museum.radioscanner.ru/avionika/aviomuzejs/rsp_7/rsp_7.html].
5. Описание ANTPN-31 [он-лайн, найдено в Интернете на http://www.fas.org/man/dod-10l/sys/ac/equip/an-tpn-31.htm или на http://www.deagel.com/Special-Purpose-Vehicles/ANTPN-31-ATNAVICS_a000607001.aspx].
6. Описание PAR 2090 С [он-лайн, найдено в Интернете на http://www.selex-sas.com/EN/Common/files/SELEX_Galileo/Products/PAR_2090.pdf].
7. Описание RP-5M [он-лайн, найдено в Интернете на http://www.eldis.cz/files/katalog_list/radar-RP-5M-en.pdf].
8. Федеральные авиационные правила "Радиотехническое обеспечение полетов и авиационная электросвязь. Сертификационные требования". - М., 1999 г. [он-лайн, найдено в Интернете на http://www.stroyplan.ru/docs.php?showitem=6495#i 106600].
9. Теоретические основы радиолокации./Под ред. В.Е. Дулевича. - М., изд-во «Сов.радио», 1964 г.
Оптическая система тепловизионного прибора
Инфракрасная система с двумя полями зрения
Устройство обработки фазоманипулированных радиолокационных сигналов
Двухканальная зеркально-линзовая система
Оптическая система тепловизионного прибора с двумя полями зрения
Инфракрасная зеркально-линзовая система
Светосильная инфракрасная система
Способ селекции морской цели оптико-электронной системой летательного аппарата
Посадочный радиолокатор
Устройство контроля мощности и ксвн свч трактов передатчиков
Способ противодействия беспилотным летательным аппаратам
Астровизирующий прибор
Оптическая система
Инфракрасная система с двумя полями зрения
Оптическая система тепловизионного прибора с двумя полями зрения

