Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМОМ ДВУХКОРПУСНОГО ПЛАВУЧЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области судостроения, в частности к спуско-подъемным устройствам (СПУ).
Известна конструкция бортового СПУ, установленного на спасательном судне пр. 537 «Алагез» водоизмещением 14300 т, для спуска и подъема двухкорпусных подводных аппаратов (ПА). СПУ состоит из фермы, двух выдвижных мостов (каждый с двумя грузовыми подвесками), следящих лебедок с направляющими канатами на барабанах, грузовых лебедок, гидромоторов, соединительной муфты и системы автоматического выбора момента подъема (АСВМП). Грузовой канат СПУ коренным концом закреплен за ферму СПУ, а ходовой конец проведен через блоки каждой грузовой подвески с автоматическим захватом (ЗА) и закреплен на барабане грузовой лебедки. СПУ грузоподъемностью 100 т обеспечивает подъем ПА с вершины волны с водой в легком корпусе при волнении моря до 5 баллов.
В надводном положении ПА в проницаемых частях его легкого корпуса в момент подъема может находиться до 30-40% воды от массы ПА.
Недостатками устройства являются завышенная грузоподъемность, большие массо-габаритные характеристики (МГХ).
Известен способ управления подъемом двухкорпусных ПА спуско-подъемным устройством, установленным на спасательном судне пр. 537. Способ управления механизмами и устройствами СПУ обеспечивает подъем ПА с воды проведением ряда последовательных операций.
Выдвигают за борт мост СПУ. Направляющие канаты следящих лебедок соединяют с подъемными штоковыми устройствами (ШУ) ПА и включают приводы лебедок в режим слежения за натяжением направляющих канатов. По направляющим канатам опускают грузовые подвески с ЗА. После стыковки автоматических захватов с ШУ ПА барабаны грузовых лебедок соединяют муфтой с гидромоторами, работающими в режиме слежения за колебаниями ПА на волнении для предотвращения образования слабины в канатах, а электродвигатели грузовых лебедок включают в работу на холостом ходу (режим ожидания подъема). Для перевода работы грузовых лебедок СПУ в режим подъема ПА включают автоматическую систему выбора момента подъема (АСВМП), которая автоматически переключает муфту на соединение барабанов грузовых лебедок с электродвигателями в момент нахождения ПА на вершине волны [1].
Недостатком способа управления подъемом двухкорпусного ПА с вершины волны является то, что нагрузка на грузовые канаты СПУ в начальный момент подъема с уходом волны к подошве увеличивается за счет массы воды, которая не успевает сливаться из легкого корпуса ПА за быстро уходящей волной.
Подъем ПА с водой в легком корпусе бортовым СПУ приводит к росту кренящего момента судна и необходимости увеличения его ширины для обеспечения остойчивости и водоизмещения. Суда большого водоизмещения имеют высокую стоимость постройки и эксплуатации.
На тихой воде ПА также поднимают на борт с водой в легком корпусе. Вода сливается в воздухе по мере подъема ПА до конечного выключателя на ноке СПУ.
Известно устройство для спуска и подъема плавучих объектов, содержащее ферму, на которой расположены следящая лебедка с направляющим канатом, ходовой конец которой соединяется с подъемным штоковым устройством объекта, датчик натяжения направляющего каната и ветви грузового каната, один конец каждой ветви запасован на барабан грузовой лебедки, а второй проходит через блоки грузовой подвески с автоматическим захватом и уложен на барабан следящей лебедки грузового каната, при этом датчик натяжения направляющего каната функционально связан с блоком управления следящей лебедки грузового каната таким образом, что при спуске грузовой подвески обе следящие лебедки работают синхронно с колебаниями объекта через нормально замкнутый контакт реле, установленного в цепи управления грузовой лебедкой при травлении каната.
Предложенная схема запасовки грузового каната и способ управления спуском грузовой подвески СПУ позволяет исключить динамические удары при захвате штокового устройства объекта в условиях морского волнения [2] (прототип).
Способ управления подъемом объекта с воды не раскрывается, однако из описания устройства и рисунка следует, что объект поднимают с водой в легком корпусе. Грузовую лебедку включают на подъем при нахождении объекта на вершине волны. При этом работа следящей лебедки грузового каната блокируется. С уходом волны к подошве объект отрывается от поверхности моря и его поднимают на борт с водой в легком корпусе, которая сливается в воздухе.
Недостатком способа подъема является то, что режим управления лебедками не обеспечивает слив воды из легкого корпуса объекта до его отрыва от поверхности воды.
Недостатком устройства являются завышенные грузоподъемность и МГХ.
Задачей изобретения является снижение грузоподъемности и МГХ СПУ, предназначенных для подъема с воды двухкорпусных объектов.
Задача решается тем, что при подъеме объекта на борт судна слив воды из проницаемых частей легкого корпуса обеспечивают до его отрыва от поверхности моря, и грузоподъемность снижается на величину, соответствующую массе воды в легком корпусе.
Сущность заявляемого способа заключается в том, что подъем двухкорпусного объекта до его отрыва от поверхности моря обеспечивают со скоростью слива воды из проницаемых частей легкого корпуса, для чего грузовые лебедки включают на подъем независимо от фазы волны, а следящие лебедки грузового каната устанавливают на тормоз и создают усилие выбирания в грузовых канатах, адекватное подъемному весу объекта без воды в легком корпусе, которое в ходе последовательных колебаний поддерживают постоянным по величине работой амортизатора.
Для реализации указанного способа предлагается устройство, содержащее ферму, следящую лебедку с направляющим канатом, ходовой конец которого соединяется со штоковым устройством объекта, грузовую лебедку, канат которой проходит через блоки грузовой подвески с автоматическим захватом и заведен на барабан следящей лебедки грузового каната, и систему управления подъемом, включающую панель управления, функционально связанную с блоками управления электродвигателями лебедок, реле управления питанием катушек тормозов, реле в цепи включения электродвигателя грузовой лебедки на подъем с нормально разомкнутым контактом в цепи управления следящей лебедкой грузового каната и амортизатор.
Существенным отличием от прототипа является способ управления подъемом двухкорпусного объекта с воды, при котором в ходе последовательных колебаний на волнении создают и поддерживают усилие в грузовых канатах, адекватное подъемному весу объекта без воды в легком корпусе, а также конструкция СПУ с системой управления подъемом, включающей панель управления, блоки управления электродвигателями лебедок, реле управления питанием катушек тормозов, реле в цепи включения электродвигателя грузовой лебедки на подъем с нормально разомкнутым контактом в цепи управления следящей лебедкой грузового каната и амортизатор.
Полезность отличительных признаков состоит в том, что предложенный способ управления подъемом и конструкция устройства обеспечивают по сравнению с прототипом:
- уменьшение грузоподъемности СПУ за счет слива воды из легкого корпуса объекта до выхода его из воды;
- уменьшение кренящего момента судна при подъеме двухкорпусных объектов бортовым СПУ;
- возможность уменьшения водоизмещения и стоимости судна-носителя двухкорпусного объекта;
- возможность повышения допустимой степени волнения моря для СПУ, ранее установленных на судне для подъема двухкорпусных объектов;
- возможность спуска и подъема как однокорпусных, так и двухкорпусных объектов равной массы в воздухе.
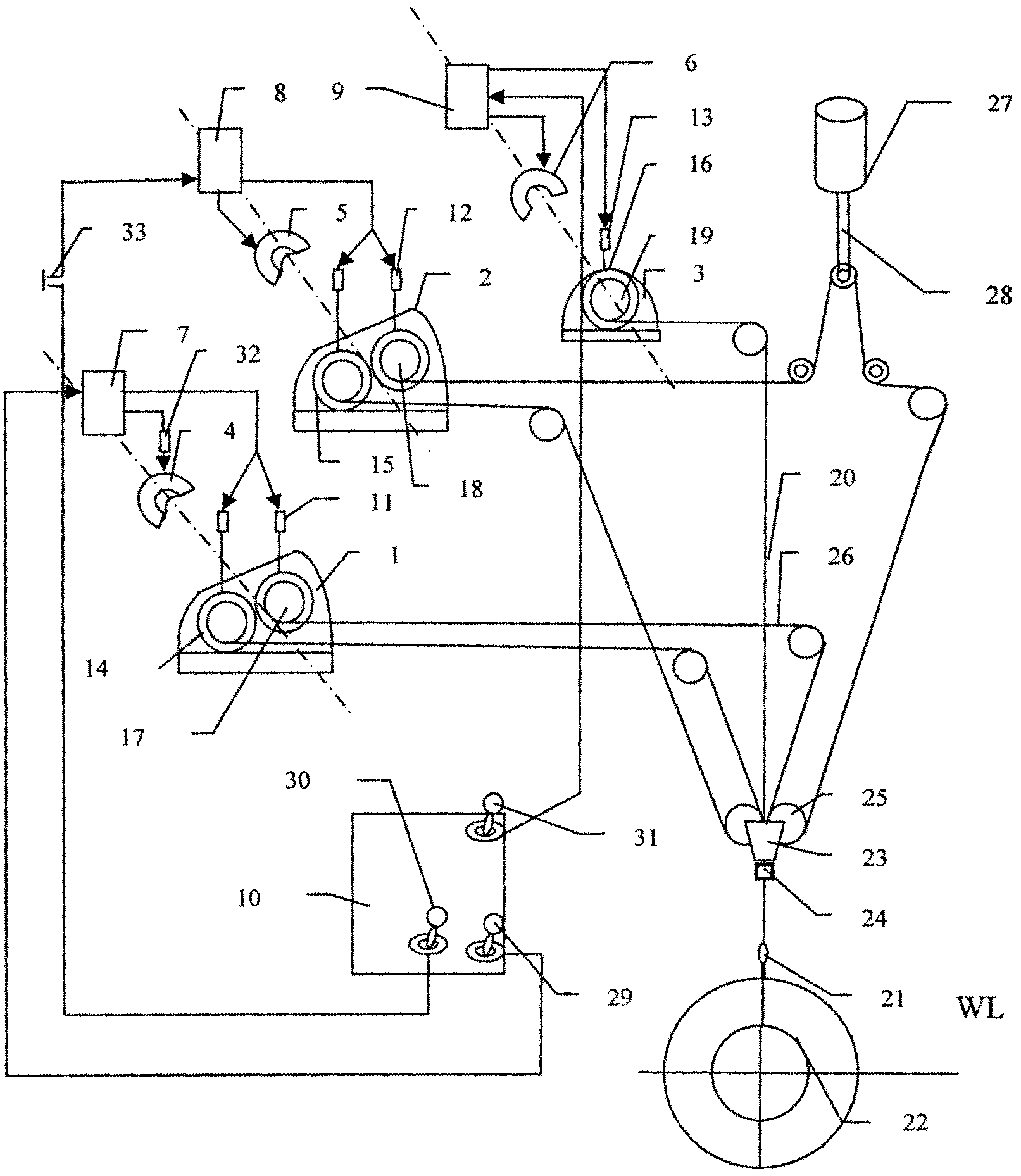
Сущность изобретения поясняется чертежом.
На чертеже изображена схема системы управления подъемом объекта для одной грузовой подвески бортового СПУ. Ферма СПУ на чертеже не показана.
Система управления подъемом включает в себя грузовую лебедку 1, следящую лебедку 2 грузового каната 26, следящую лебедку 3 направляющего каната 20, панель управления (ПУ) 10, блоки управления 7, 8, 9 электродвигателями 4, 5, 6 лебедок, реле управления 11, 12, 13 механическими тормозами 14, 15, 16 барабанов 17, 18, 19 лебедок 1, 2, 3. Направляющий канат 20 уложен на барабан 19 следящей лебедки 3, соединяется со штоковым устройством 21 поднимаемого объекта 22 и служит для перемещения грузовой подвески 23 с автоматическим захватом 24. Через блоки 25 грузовой подвески 23 проходят ветви грузового каната 26. Один конец каждой ветви каната 26 запасован на барабан 17 грузовой лебедки 1, а другой - через блоки амортизатора 27 со штоком 28 на барабан 18 следящей лебедки 2 грузового каната 26. На ПУ 10 расположены джойстики 29, 30, 31 блоков управления 4, 5, 6. В цепи питания электродвигателя 7 грузовой лебедки 1 предусмотрено реле 32 с нормально разомкнутым контактом 33, установленным в цепи управления следящей лебедкой 2.
Устройство работает следующим образом.
В исходном для подъема положении объект 20 удерживается у борта спасательного судна спуско-подъемным устройством. Автоматические захваты 24 грузовой подвески 23 соединены с ШУ 21. Джойстик 29 в нейтральном положении. Электродвигатель 7 грузовой лебедки 1, реле 32 и реле управления 11 тормозами 14 обесточены. Грузовая лебедка 1 выключена и установлена на тормоза 14. Контакт 33 реле 32 замкнут. Джойстики 30 и 31 установлены в положение АВТОМАТ. Следящие лебедки 2 и 3 работают в режиме «слежения» за перемещениями объекта 20 на волнении. Усилие следящей лебедки 2 соответствует массе грузовой подвески 23 с автоматическим захватом 24. Усилие следящей лебедки 3 соответствует заданному натяжению направляющего каната 20. Осадка объекта соответствует его надводному водоизмещению с учетом усилия натяжения следящей лебедки 2.
Для подъема объекта с воды джойстик 29 устанавливают в положение ПОДЪЕМ. Блок управления 7 подает команду реле 11 на снятие барабанов 25 лебедки 1 с тормозов 14. На электродвигателе 4 грузовой лебедки 1 создают момент на выбирание грузового каната с заданным усилием натяжения (с учетом динамики), адекватным подъемному весу объекта в воздухе. При этом кренящий момент судна будет минимальным. Одновременно получает питание реле 32. Реле 32 контактом 33 размыкает цепь блока управления 8 следящей лебедкой 2. Электродвигатель 5 и реле управления 12 механическими тормозами 15 теряют питание, и лебедка 2 затормаживается.
Амортизатор 27 отрегулирован на заданное натяжение, и его шток 26 выдвинут в среднее положение.
По мере подъема объекта с уменьшением осадки вода из проницаемых частей корпуса, находящаяся выше ватерлинии, будет сливаться через вырезы в его легком корпусе в соответствии с грузовым размером проницаемых частей [3].
При движении волны к подошве уменьшается сила плавучести объекта. При этом под воздействием массы воды в легком корпусе, остающейся по мере слива выше ватерлинии, объект опускается вслед за волной с отставанием по фазе.
При превышении заданного усилия натяжения грузовых канатов подключается в работу на травление амортизатор 27. Шток 26 амортизатора 27 выдвигается, поддерживая заданное натяжение каната. У подошвы волны осадка объекта уменьшится по сравнению с исходной.
При движении волны к вершине сила плавучести объекта увеличивается. Амортизатор 27 работает на выбирание каната, поддерживая заданное натяжение. На вершине волны осадка объекта уменьшится по сравнению с положением у подошвы.
Таким образом, подъем объекта до отрыва от поверхности производится со скоростью слива воды из легкого корпуса при минимальном кренящем моменте судна.
Под скоростью слива воды из легкого корпуса через площадь отверстий понимается изменение уровня водной поверхности внутри легкого корпуса двухкорпусного объекта в единицу времени под суммарным воздействием подъемного усилия СПУ, сил веса и плавучести объекта.
Цикл колебаний повторяется до полного слива воды из легкого корпуса объекта, после чего усилием в грузовых канатах обеспечивают отрыв объекта от поверхности воды и его подъем на борт судна.
После установки объекта на кильблоки СПУ приводят в исходное положение.
Таким образом, использование предлагаемого изобретения обеспечивает подъем с воды двухкорпусного объекта минимальным подъемным усилием при минимальном кренящем моменте судна.
Изобретение обладает новизной и полезностью. Снижаются грузоподъемность СПУ и его МГХ, что позволяет уменьшить водоизмещение и стоимость судна.
Предложенный способ подъема двухкорпусных объектов может быть использован при создании СПУ бортового, кормового или шахтного типа.
Предложенная конструкция СПУ обеспечит также спуск и подъем однокорпусных объектов равной массы в воздухе.
Изобретение может быть реализовано при проектировании спасательных и других судов-носителей подводных аппаратов, сверхмалых ПЛ и других двухкорпусных объектов.
Литература
1. Козюков Л.В. История создания и развития спасательных судов ВМФ. Судостроение №5, 1997.
2. Устройство для спуска и подъема плавучих объектов. А.С. 919264 (Обзор изобретений, ранее закрытых для печати, «Судостроение и судовождение, океанография», часть 1, п. 111), 2004.
3. Справочник специалиста аварийно-спасательной службы, часть II, с. 27, М.: Воениздат, 1963.
Способ бесстробового автоматического сопровождения подвижной цели
Способ передачи информации в сдв диапазоне
Способ роботизированного обеспечения применения высокоточного оружия
Устройство управления резервированной с выбором среднего арифметического значения выходных параметров системой
Система телеуправления подводным аппаратом
Устройство для буксировки подводных аппаратов подводной лодкой
Формирователь последовательности прямоугольных импульсов с изменяемой длительностью и интервалом
Способ лазерной локации и селекции подвижной цели
Автоматизированный испытательный комплекс для электрических испытаний космических аппаратов
Комбинированная ложная цель для имитации зенитно-артиллерийских средств
Импульсный источник напряжения
Способ бесстробового автоматического сопровождения подвижной цели
Способ передачи информации в сдв диапазоне
Способ роботизированного обеспечения применения высокоточного оружия
Устройство управления резервированной с выбором среднего арифметического значения выходных параметров системой
Система телеуправления подводным аппаратом
Устройство для буксировки подводных аппаратов подводной лодкой
Формирователь последовательности прямоугольных импульсов с изменяемой длительностью и интервалом
Способ лазерной локации и селекции подвижной цели
Автоматизированный испытательный комплекс для электрических испытаний космических аппаратов

