Результат интеллектуальной деятельности: СПОСОБ КОМБИНИРОВАННОГО СГЛАЖИВАНИЯ КООРДИНАТ ПОДВИЖНОЙ ЦЕЛИ
Вид РИД
Изобретение
Изобретение относится к радиоэлектронике и касается принципов построения системы обработки гидроакустической или радиолокационной информации в части автоматического сопровождения подвижной цели.
Возрастающий поток информации в условиях воздействия интенсивного нестационарного шума заставляет разработчиков систем обработки информации предъявлять все более высокие требования к надежности системы обработки информации. Только автоматическое сопровождение целей позволяет справиться с возросшим потоком информации, однако надежность автоматического сопровождения при воздействии шумов по-прежнему остается невысокой.
Система обработки информации ГАС, реализующая известный способ автоматического сопровождения подвижной цели [С.З. Кузьмин. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио, 1974, прототип], предполагает излучение и прием зондирующих сигналов от отражающих объектов, после чего принимают решение об обнаружении отметки цели (истинной или ложной), которой соответствуют некоторые измеренные значения координат xn, например, дальности Dn и пеленга Pn.
Каждую обнаруженную в текущем цикле обработки (локации) отметку проверяют на ее принадлежность уже сопровождаемым траекториям по отклонению координат отметки от предполагаемых (экстраполируемых) значений. Если эти отклонения по всем сопровождаемым траекториям превышают допустимый порог, отметку считают вновь обнаруженной («первичной»). Вокруг каждой вновь обнаруженной отметки на второй цикл обработки (n=2) формируют строб «первичного» сопровождения («автозахвата»), положение которого по координатам и размеры выбирают исходя из координат «первичной» отметки и максимально возможной скорости движения цели, длительности цикла обработки и измерительных ошибок. Если на втором цикле обработки в пределах данного строба обнаруживают отметку, то принимают решение об обнаружении траектории. Если отметка цели не была обнаружена на втором цикле обработки, принимают решение о прекращении процедуры обнаружения траектории или ее продолжении на следующий цикл (n=3) с соответствующим увеличением строба «автозахвата».
Воздействие нестационарного интенсивного шума приводит к появлению на входе системы обработки ложных отметок. Если в пределах строба обнаруживают несколько отметок, то выбирают отметку, ближайшую к центру строба.
Как правило, полагают траекторию цели обнаруженной при обнаружении не менее двух отметок в пределах строба «автозахвата» в трех смежных циклах обработки, после чего известным способом определяют направление и скорость изменения положения цели в принятой системе координат, выполняют оценку (сглаживание) координат цели и прогнозируют (экстраполируют) ее положение на последующие циклы обработки.
Оценку или сглаживание координат сопровождаемой цели выполняют с использованием фильтров сглаживания, например экспоненциального фильтра, фильтра Калмана, фильтра «скользящего» сглаживания и др.
Для экспоненциального фильтра оценку или сглаженное значение координаты цели  и скорости ее изменения Vn на n-ом цикле обработки определяют с использованием следующих рекуррентных выражений:
и скорости ее изменения Vn на n-ом цикле обработки определяют с использованием следующих рекуррентных выражений:


где α и β - коэффициенты сглаживания экспоненциального фильтра,
xen - экстраполируемое на n - цикл значение координаты цели,
T - период цикла обработки (локации).
Обычно полагают, что цель движется в пространстве с постоянной скоростью и курсом, тогда экстраполируемое значение координаты цели определяют, используя выражение:

Экстраполированные значения координат цели определяют положение центра строба сопровождения на следующий цикл обработки. Размеры строба сопровождения по каждой координате выбирают соответственно предполагаемым ошибками экстраполяции и измерительным ошибкам.
Сброс траектории цели с сопровождения выполняют при отсутствии обнаруженных отметок в трех и более смежных циклах обработки.
Недостатком экспоненциального фильтра сглаживания является низкая точность сопровождения, которая, как показали результаты статистического моделирования, на участке устойчивого сопровождения достигает уровня 70-80% от измерительной ошибки.
Существенно более высокую точность на участке устойчивого сопровождения (до 30-40% от измерительной ошибки) удается получить для линейного фильтра Калмана. Оценки координаты цели и скорости ее изменения для такого фильтра определяют с использованием следующих рекуррентных выражений:


где ψ11n и ψ12n - коэффициенты сглаживания для фильтра Калмана, вычисляемые согласно рекуррентным выражениям:
где  ,
,  - дисперсия измеренных значений координаты,
- дисперсия измеренных значений координаты,
τe - интервал времени, на который выполняют экстраполяцию координаты, обычно берут τe=kT(k=1, 2, …).
Недостатком линейного фильтра Калмана является его инерционность, что обуславливает низкую точность сопровождения на начальном участке сопровождения, т.е. при малом числе контактов с целью (n<10). Ошибки сглаживания в этом случае могут на 20% и более превышать измерительные ошибки, а ошибки экстраполяции - в 2 и более раз.
Целью настоящего изобретения является снижение ошибок сопровождения при малом числе контактов с целью.
Достигается это согласно предлагаемому способу комбинацией нескольких фильтров сглаживания, отличающихся своей инерционностью, например экспоненциального фильтра и фильтра Калмана. При этом на начальном этапе сопровождения (n≤m) оценку (сглаживание) координат выполняют с использованием фильтра малой инерционности, например экспоненциального фильтра. Эти данные применяют для расчета экстраполированных на n+1 цикл обработки значений координат сопровождаемой цели. На m+1 цикле обработки сглаженное значение координаты определяют с использованием фильтра большой инерционности, например фильтра Калмана. При этом коэффициент усиления фильтра Калмана берут соответственно текущему номеру цикла обработки. Полученное сглаженное значение координаты используют для вычисления ее экстраполированного на следующий (m+2) цикл обработки значения. Далее процесс определения сглаженного и экстраполированного значений координат сопровождаемой цели повторяют с использованием только фильтра Калмана, пока не будет принято решение о сбросе цели с сопровождения.
По результатам статистического моделирования была рассчитана дисперсия случайной ошибки оценки дальности Dsnj ( ) для M=100 реализации после n циклов обработки (контактов с целью).
) для M=100 реализации после n циклов обработки (контактов с целью).
Сглаженные и экстраполированные значения дальности рассчитывались согласно выражениям (1-7), дисперсия  - согласно выражению:
- согласно выражению:

где Dистn - истинное значение дальности для n цикла обработки.
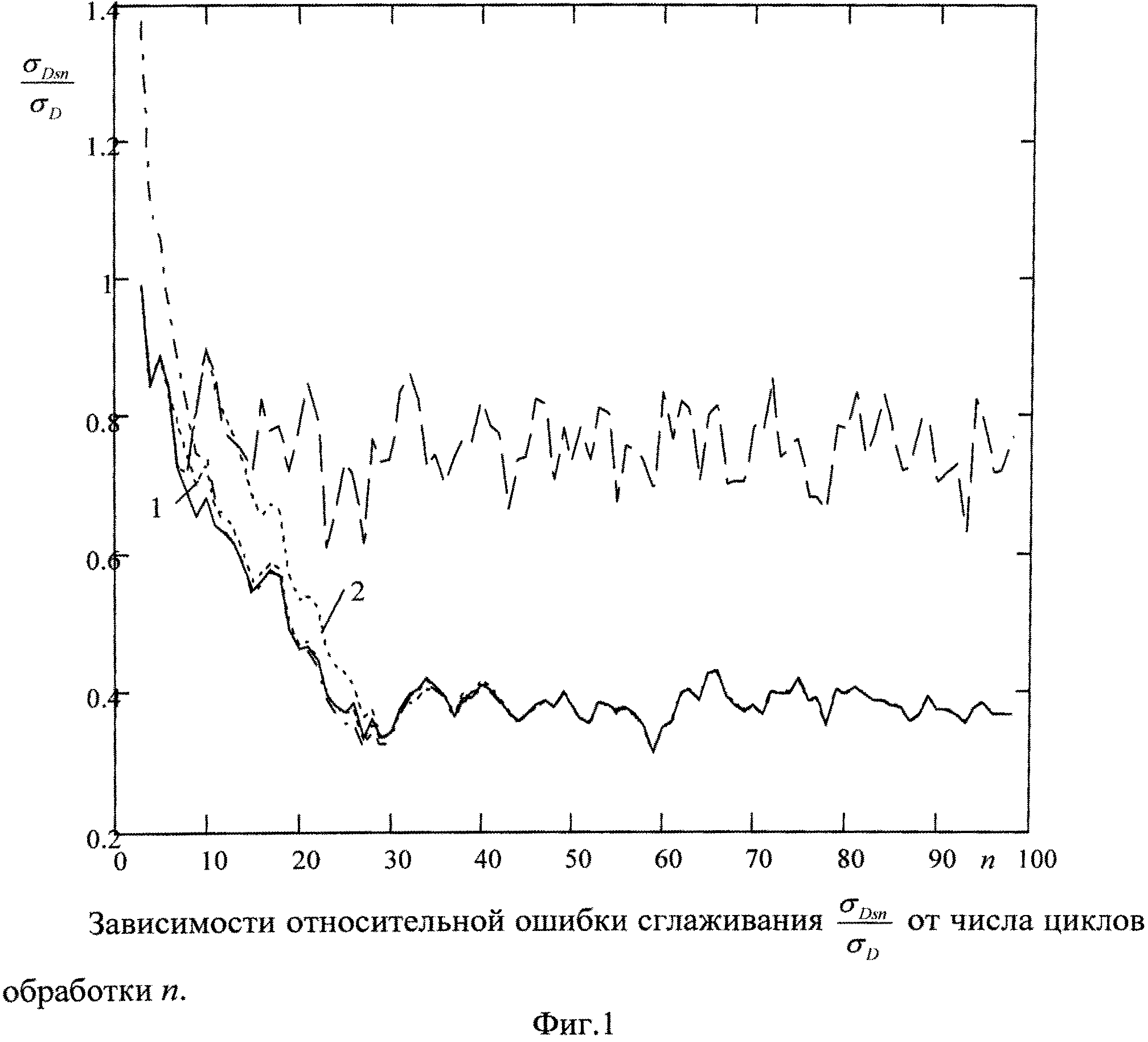
На фиг.1 построены рассчитанные по результатам статистического моделирования зависимости отношения среднего квадратического отклонения случайной ошибки (СКО) сглаживания к СКО измеренных значений координаты (σD) -  от числа циклов обработки n при использовании фильтра Калмана (штрихпунктирная линия), экспоненциального фильтра (пунктирная линия) и предлагаемого способа (точки и сплошная линия). При моделировании полагали m=5 (точки, кривая 7), m=7 (сплошная линия) и m=10 (точки, кривая 2). Наилучшие результаты были получены при m=7.
от числа циклов обработки n при использовании фильтра Калмана (штрихпунктирная линия), экспоненциального фильтра (пунктирная линия) и предлагаемого способа (точки и сплошная линия). При моделировании полагали m=5 (точки, кривая 7), m=7 (сплошная линия) и m=10 (точки, кривая 2). Наилучшие результаты были получены при m=7.
Как следует из представленных зависимостей, предлагаемый способ сглаживания позволяет получить ошибку сглаживания, не превышающую измерительной ошибки, на всем участке автоматического сопровождения, причем на участке устойчивого сопровождения она равна точности сопровождения, достижимой для фильтра Калмана, т.е. порядка 30-40% от измерительной ошибки.
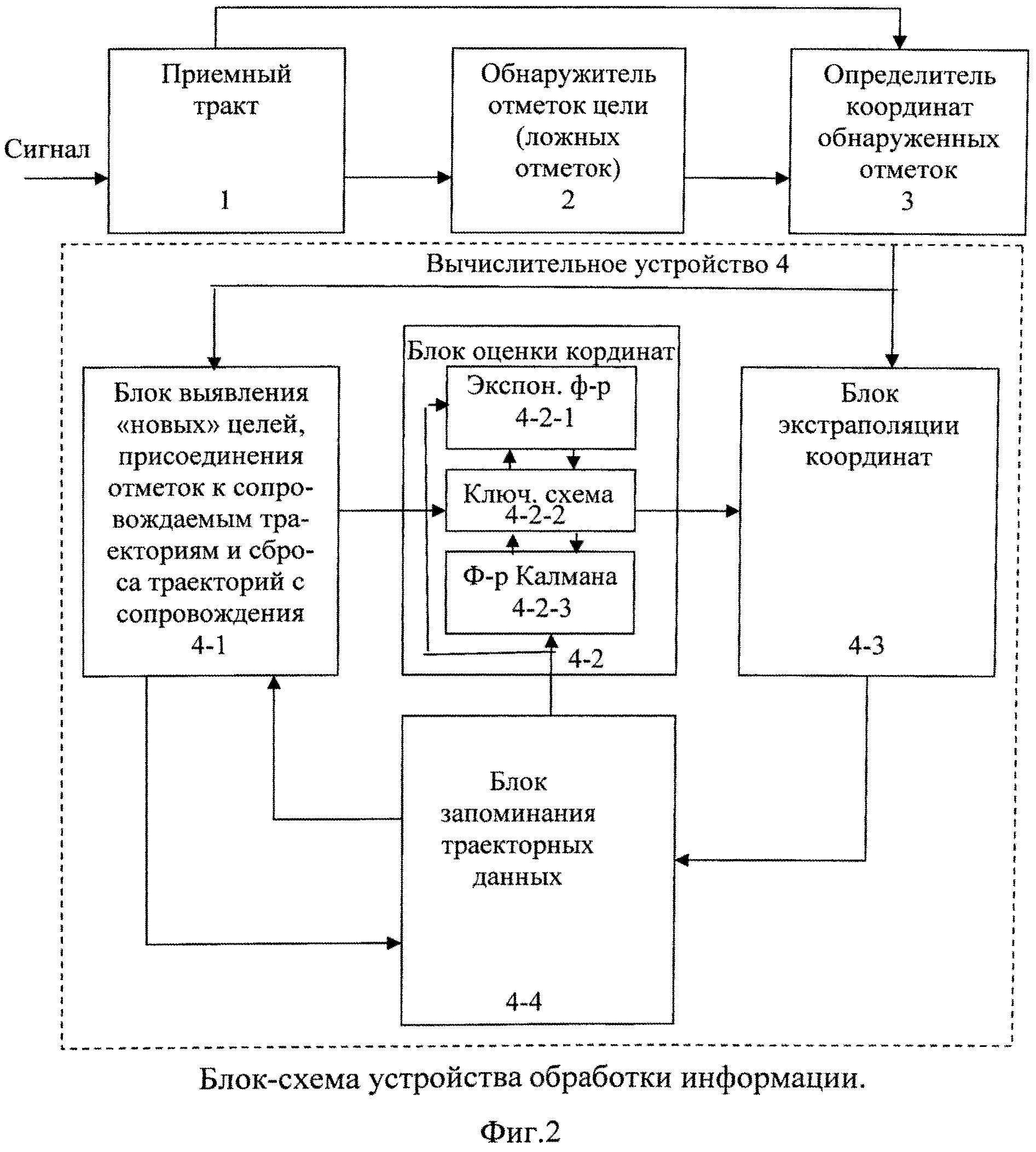
Предлагаемый способ может быть реализован в системе обработки информации, блок-схема которой представлена на фиг.2 и состоящей из последовательно соединенных приемного тракта 1, обнаружителя отметок цели (ложных отметок) 2, определителя координат обнаруженных отметок 3 и вычислительного устройства 4. Приемный тракт 1 дополнительным выходом соединен с дополнительным входом определителя координат 3.
Вычислительное устройство 4 состоит из последовательно соединенных блока выявления «новых» целей, присоединения отметок к сопровождаемым траекториям и сброса траекторий с сопровождения 4-1, вход которого является входом устройства 4, блока оценки координат 4-2, блока экстраполяции координат 4-3 и блока запоминания траекторных данных 4-4, выход которого соединен с дополнительным входом блока выявления 4-1. Дополнительный выход последнего соединен с дополнительным входом блока запоминания 4-4, дополнительный выход которого соединен со вторым входом блока оценки 4-2. Вход вычислительного устройства 4 также соединен с дополнительным входом блока экстраполяции 4-3.
Блок оценки координат 4-2 состоит из экспоненциального фильтра 4-2-1, ключевой схемы 4-2-2 и фильтра Калмана 4-2-3. Основным входом блока оценки 4 является вход ключевой схемы 4-2-2, выходы которой соединены с первыми входами фильтров 4-2-1 и 4-2-3. При этом выходы фильтров 4-2-1 и 4-2-3 через ключевую схему 4-2-2 соединены с входом блока экстраполяции 4-3. Вторые входы фильтров 4-2-1 и 4-2-3 соединены с дополнительным выходом блока запоминания 4-4.
Принимаемый антенной сигнал поступает на вход приемного тракта 1 и далее - на обнаружитель 2, где его сравнивают с порогом обнаружения. В случае превышения сигналом порога поступает команда на определитель координат 3, с выхода которого измеренные значения координат обнаруженной отметки поступают в вычислительную систему 4.
В блоке 4-1 вычислительной системы 4 обнаруженную отметку присоединяют к одной из сопровождаемых траекторий или идентифицируют как «первичную». Эти данные поступают в блок запоминания 4-4 или на вход ключевой схемы 4-2-2 блока оценки координат 4-2. В блоке 4-1 также принимают решение о прекращении сопровождения траекторий целей, отметки которых не были обнаружены в текущем цикле обработки.
В блоке 4-2 выполняют оценку (сглаживание) координат обнаруженной отметки согласно предлагаемому способу и с учетом запомненных на предыдущем цикле обработки данных. Переключение фильтров сглаживания выполняют с помощью ключевой схемы 4-2-2, которая выбирает фильтр сглаживания соответственно текущему номеру цикла обработки n и, если n≤m, то присоединяют экспоненциальный фильтр, если n>m, то присоединяют фильтр Калмана.
В блоке 4-3 определяют экстраполируемые на следующий цикл обработки значения координат, которые запоминают в блоке 4-4.
Источники информации
1. Кузьмин С.З. Цифровая обработка радиолокационной информации. - М.: Сов. радио, 1967.
2. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: Сов. радио, 1974.
3. Least squares algorithms for constant-acceleration target tracking. Dagancay Kutluyil, Proceedinos of the International Conference on Radar, Adelaide, 3-5 Sept., 2003. Piscataway (N.J.); IEEE. 2003. p.566-571.
Понтон для подъема затонувших объектов
Способ пеленгования воздушного объекта
Способ защиты средства спутниковой радиосвязи от самонаводящегося на радиоизлучение элемента поражения
Способ поражения объектов, прикрываемых аэрозольной завесой
Способ обнаружения мерцающей помехи с плавным изменением мощности сигнала
Когерентно-импульсная радиолокационная станция
Способ обнаружения высокоскоростных воздушных целей
Система глобального мониторинга в режиме реального времени параметров состояния многопараметрических объектов
Устройство для определения утечек взрывоопасных жидкостей на основе пьезосенсора
Манжетное уплотнительное устройство
Стенд для раскрытия батареи солнечной
Понтон для подъема затонувших объектов
Способ пеленгования воздушного объекта
Способ защиты средства спутниковой радиосвязи от самонаводящегося на радиоизлучение элемента поражения
Способ поражения объектов, прикрываемых аэрозольной завесой
Способ обнаружения мерцающей помехи с плавным изменением мощности сигнала
Когерентно-импульсная радиолокационная станция
Способ обнаружения высокоскоростных воздушных целей
Система глобального мониторинга в режиме реального времени параметров состояния многопараметрических объектов
Устройство для определения утечек взрывоопасных жидкостей на основе пьезосенсора

