НАВИГАЦИОННАЯ СИСТЕМА
Вид РИД
Изобретение
Изобретение относится к радионавигации.
В настоящее время широко известны спутниковые навигационные системы, такие как GPS, ГЛОНАСС и др. [1]. Навигационные приемники, способные осуществлять навигацию (позиционирование) с помощью радиосигналов этих систем, широко распространены. Одним из недостатков спутниковых навигационных систем является небольшая мощность радиосигналов спутниковых передатчиков. По этой причине радиосигналы, доходящие до навигационных приемников спутниковых навигационных систем, очень слабы. Это затрудняет или делает полностью невозможным использование спутниковых навигационных систем для навигации в условиях плотной городской застройки, внутри помещений и в других сложных случаях, где радиосигналы этих систем претерпевают сильное ослабление.
Улучшить работу навигационного приемника спутниковых навигационных систем в сложных условиях могут системы поддержки навигации, типа A-GPS или их аналоги [2]. В зависимости от варианта поддержки навигационный приемник по системе связи может получать от системы поддержки эфемериды спутников, примерные координаты своего местоположения, отправлять в вычислительный центр характеристики принимаемых радиосигналов (например, задержка, частота и т.д.) для расчета своего местоположения и получения результата, а также получать другие вспомогательные данные. Как правило, в таких случаях системой связи является система сотовой (мобильной) связи, а навигационный приемник интегрирован в сотовый (мобильный) телефон. Системы сотовой (мобильной) связи имеют свои возможности более или менее точного определения местоположения сотового (мобильного) телефона и отправки ему этого результата. Некоторые из этих возможностей описаны в [3]. Применение систем поддержки позволяет ускорить старт навигационного приемника, улучшить обнаружение и захват слабых радиосигналов. К сожалению, сами по себе системы поддержки не могут улучшить качество принимаемых навигационным приемником радиосигналов и. как результат, может быть относительно большая ошибка навигации в сложных условиях.
Существуют также наземные радионавигационные системы. В этом случае расстояния между передатчиками радионавигационной системы и навигационным приемником значительно меньше, чем в случае применения спутниковых навигационных систем, что обеспечивает гораздо более высокий уровень мощности радиосигналов. Наземные радионавигационные системы можно использовать для навигации в условиях плотной городской застройки, внутри помещений и в других сложных случаях. Помимо высокой мощности радиосигналов, преимуществами наземных радионавигационных систем являются отсутствие неточностей определения координат их передатчиков, отсутствие влияния ионосферы на радиосигналы, меньшее влияние тропосферы на радиосигналы, гибкость и возможность оптимизации наземной сети передатчиков.
В частности, известна наземная радионавигационная система Locata [4]. Навигационная система Locata представляет собой наземную сеть передатчиков. Передатчики разбиты на подсети и передают в эфир навигационные радиосигналы, в целом очень похожие на радиосигналы спутниковых навигационных систем. Навигационный приемник, приспособленный для приема и обработки сигналов передатчиков системы Locata, находясь в зоне действия какой-либо из ее подсетей, способен самостоятельно осуществлять навигацию, в целом очень похожую на навигацию (позиционирование) по радиосигналам спутниковых навигационных систем.
Основные отличия системы Locata от систем спутниковой навигации: временное разделение каналов (ВРК) в подсети (временное разделение радиосигналов передатчиков в подсети); изменение в процессе работы временного расположения сигнала передатчика в пределах подкадра; отличающаяся информация навигационного сообщения в каждом передатчике; произвольные допустимые рабочие частоты подсетей; отличающаяся система синхронизации передатчиков подсети и групп подсетей [4-7].
Навигационная система Locata выбрана за прототип и имеет следующие недостатки: возможность любого (несанкционированного, неавторизованного) пользователя, имеющего соответствующий навигационный приемник, использовать данную систему для навигации; отсутствие хэндовера для навигационного приемника между различными подсетями; отсутствие взаимодействия (помимо сигналов передатчиков) между навигационной системой и навигационными приемниками, в частности, затрудняющее изменение сигналов передатчиков в процессе ее работы и изменения структуры и режима работы навигационной системы; сложная структура вещания сигналов посредством ВРК, требующая соответствующего навигационного приемника. Описанные недостатки в соответствующем отношении порождают недостатки навигационного приемника сигналов системы Locata и способов его работы.
Более подробно описываемый здесь уровень техники изложен в литературе [1-7], которая включена в это описание в качестве ссылки. Технологии, описанные в [5-7], используются для реализации системы Locata.
Цель изобретения - создание навигационной системы с отсутствием указанных недостатков прототипа.
Сущность изобретения
В общем виде навигационная система состоит из нескольких передатчиков, передающих радионавигационные сигналы, с помощью которых любой навигационный приемник, способный обрабатывать эти сигналы, в состоянии осуществить навигацию -определить свои координаты и, по возможности, другие свои характеристики, например, скорость, вектор движения и т.д. Навигационная система может содержать подсистему управления, необходимую для управления работой передатчиков и/или для взаимодействия с навигационными приемниками. Радионавигационные сигналы в данном описании могут быть обозначены также как навигационные сигналы или радиосигналы, или навигационные радиосигналы, или сигналы. Радионавигационный сигнал любого передатчика в своей основе может содержать дальномерный код, модулирующий несущую частоту этого передатчика.
I. Структура навигационной системы и синхронизация
Передатчики навигационной системы могут быть разделены на группы, являющиеся подсетями. Навигационная система может состоять из отдельных передатчиков не входящих в структурные единицы. Возможен также смешанный вариант структуры сети, на основе двух вышеперечисленных вариантов.
Для правильной работы навигационной системы важную роль играет синхронизация сигналов передатчиков. Общее правило: сигналы тех передатчиков, которые используются навигационным приемником (или другими устройствами) для реализации навигации, должны быть либо синхронизированы, либо для них можно определить относительные временные смещения любым возможным способом. Это общее правило может быть реализовано различными конкретными способами, в частности, такой же синхронизацией, какая используется в системе-прототипе [4-7].
1. Первый вариант синхронизации предполагает непосредственную синхронизацию сигналов передатчиков. В таком случае сигналы этих передатчиков излучаются в радиоэфир синхронно.
2. Второй вариант предполагает передачу информации о параметрах синхронизации между определенными передатчиками в составе информации (навигационных сообщений) их навигационных сигналов. В таком случае сигналы этих передатчиков могут излучаться в радиоэфир несинхронно, но по поправкам, извлеченным из навигационных сообщений передатчиков, можно учесть эту несинхронность.
3. Третий вариант предполагает передачу информации о параметрах синхронизации между определенными передатчиками в составе информации, получаемой навигационным приемником через взаимодействие с подсистемой управления.
4. Четвертый вариант предполагает определение параметров синхронизации между определенными передатчиками через подсистему управления (или через другие устройства). В таком случае подсистема управления (или другие устройства) выполняет также функцию (процесс, вычисление) навигации, а навигационный приемник получает лишь результат навигации.
5. Пятый вариант предполагает любую возможную комбинацию всех перечисленных выше вариантов синхронизации.
Таким образом, все или часть сигналов передатчиков одной подсети или нескольких подсетей могут быть синхронизированы. В другом случае сигналы передатчиков внутри одной подсети могут быть несихронизированы. Навигационный приемник или другие устройства могут использовать для навигации сигналы передатчиков одной подсети или нескольких подсетей, или сигналы отдельных передатчиков (не входящих в какие-либо структурные единицы), или произвольную комбинацию всех этих случаев.
II. Разделение каналов
1. Первый вариант предполагает использование частотного разделения каналов (ЧРК) для передатчиков. Аналогом является система ГЛОНАСС [1]. В этом случае каждый передатчик на заданной для него несущей частоте транслирует соответствующий ему радионавигационный сигнал. Расположение несущих частот по спектру может быть произвольным. Однако, учитывая большой динамический диапазон радиосигналов. желательно выполнять ЧРК без наложения спектров сигналов разных частотных каналов. ЧРК возможно при любой реализации навигационной системы по разделу I. Например, ЧРК внутри одной подсети, а другие подсети могут использовать эти же частоты. Или, например, ЧРК между сигналами нескольких подсетей. Основным (но не обязательным) вариантом работы для передатчика при ЧРК является постоянная передача заданного дальномерного кода.
2. Второй вариант предполагает использование ВРК. Аналогом является система Locata [4]. В отличие от системы Locata также дополнительно возможно введение защитных временных интервалов между сигналами различных каналов. ВРК возможно при любой реализации навигационной системы по разделу I. Например, ВРК внутри одной подсети, а другие подсети могут использовать эти же временные интервалы. Или, например, ВРК между сигналами нескольких подсетей. Основным (но не обязательным) вариантом работы для передатчика при ВРК является передача заданного дальномерного кода в отведенные интервалы времени. Защитные временные интервалы устраняют недостаток системы Locata - наложение сигналов разных каналов во времени вследствие разных расстояний от разных передатчиков до навигационного приемника.
3. Третий вариант предполагает совместное использование ЧРК и ВРК (ЧРК-ВРК). В таком случае в навигационной системе используется более одной несущей частоты, а для каждой этой несущей частоты реализуется разделение каналов в соответствии с предыдущим вариантом. ЧРК-ВРК возможно при любой реализации навигационной системы по разделу I.
Предполагается, что основным вариантом работы для любого передатчика является передача сигнала только одного канала. Однако не исключается, что один передатчик может передавать сигналы нескольких каналов. Одному передатчику в каждый конкретный момент времени соответствуют только одни его характеристики (например, координаты, время и т.п.).
III. Модуляция
В общем случае модуляция несущей частоты передатчика навигационной системы может быть любой. Модуляции различных передатчиков могут различаться.
Предпочтительным вариантом является модуляция несущей частоты дальномерным кодом псевдослучайной последовательности (ПСП), а поверх этой модуляции (если это необходимо) накладывается модуляция информационным сигналом навигационного сообщения. Таким образом, сигнал передатчика может являться сигналом с расширением спектра прямой последовательностью. Навигационное сообщение может передаваться путем сложения сигнала ПСП и информационного сигнала по модулю 2.
Несущая частота может модулироваться с помощью бинарной фазовой манипуляции (BPSK), квадратурной фазовой манипуляции (QPSK) или другими видами модуляции. Скорость манипуляции для различных компонент модулированного сигнала передатчика может быть произвольной. Например, синфазная компонента QPSK модулируется ПСП со скоростью 1023 бит за 1 мс, а квадратурная компонента QPSK модулируется ПСП со скоростью 10230 бит за 1 мс. Различные компоненты модулированного сигнала могут быть промодулированы одинаковыми или разными способами, эти способы могут быть синхронными или несинхронными, эти компоненты могут передавать одинаковые или разные навигационные сообщения или не передавать никаких сообщений.
Так как спектры некоторых модулированных сигналов симметричны относительно несущей частоты (например, BPSK, QPSK, амплитудная манипуляция и т.д.), то можно передавать в радиоэфир только одну боковую полосу частот промодулированного сигнала. Таким образом, можно использовать однополосную модуляцию.
Таким образом, сигналы передатчиков навигационной системы могут быть промодулированы самыми различными способами и эти способы возможны настолько насколько не противоречат другим характеристикам навигационной системы.
В частности, сигналы передатчиков могут быть промодулированы способами, известными из других навигационных систем [1, 2, 4].
IV. Навигационное сообщение
1. Первый вариант предполагает отсутствие навигационного сообщения в сигнале передатчика. В этом случае навигационный приемник получает необходимые ему данные из других источников, например, от подсистемы управления и/или пересылает параметры принимаемых сигналов в другое устройство для выполнения функции навигации в нем, а навигационный приемник получает лишь результат навигации.
2. Второй вариант предполагает наличие навигационного сообщения в сигнале передатчика. В этом случае навигационное сообщение любого передатчика по аналогии с существующими спутниковыми навигационными системами может быть структурировано в строки, подкадры, кадры, суперкадры и т.п. Навигационное сообщение передатчика может содержать все или некоторые из перечисленных ниже данных:
- информация помехоустойчивого кодирования сообщения (проверочные биты);
- точки отсчета в навигационном сообщении (например, метки времени);
- координаты передатчика и/или система координат передатчика;
- время передатчика;
- идентификатор (ИД) передатчика (например, номер передатчика);
- ИД структурной единицы системы (например, номер подсети или номер подсистемы управления подсети, и т.п.);
- ИД структурной единицы навигационного сообщения (например, номер строки);
- ИД варианта передаваемого сообщения;
- временные поправки, синхронизирующие поправки и т.п.;
- ИД дальномерного кода (например, номер передаваемой ПСП);
- время действия (время завершения действия) данного сообщения;
- ИД изменения параметров сообщения;
- данные других передатчиков навигационной системы;
- данные других структурных единиц навигационной системы;
- грубые данные (альманах) заданного передатчика;
- координаты сети (например, границы подсети передатчика);
- радиус (или зона) действия заданного передатчика;
- ИД соседнего передатчика (например, номер соседнего передатчика);
- сообщение для заданного навигационного приемника;
- частотный план (например, несущие частоты передатчиков подсети);
- информацию о шифровании сообщения.
Шифрованию могут быть подвергнуты все данные сообщения или только их часть. Остальная часть может быть представлена в общедоступной форме. Помехоустойчивое кодирование может быть выполнено над уже зашифрованными данными.
Навигационное сообщение при необходимости может содержать и другие данные, кроме приведенных выше. Навигационное сообщение может содержать данные аналогичные используемым в прототипе [4] или в других навигационных системах [1-2]. Это зависит от конкретного варианта реализации навигационной системы на практике.
V. Защита доступа
Ниже рассматриваются некоторые варианты защиты навигационной системы от несанкционированного доступа (использования).
1. Первый вариант заключается в изменении во времени передаваемого дальномерного кода. В частности, происходит смена передаваемой ПСП, то есть, передатчик навигационной системы в разные моменты времени может использовать разные ПСП. В этом случае только тот навигационный приемник, который имеет информацию о том, какая ПСП передается передатчиком, способен использовать сигнал этого передатчика для навигации.
Под разными ПСП могут пониматься ПСП, имеющие одинаковую длительность, одинаковое число символов (битов), но с разными кодовыми последовательностями. Рис. 1 показывает пример навигационного сигнала с разными ПСП одинаковой длительности T1 (t - время). Рис. 2 показывает пример навигационного сигнала с разными ПСП одинаковой длительности Т2 и защитными интервалами одинаковой длительности T3 (t - время). Варианты навигационного сигнала одного из передатчиков навигационной системы, показанные на рис. 1 и 2, не являются единственно возможными и приведены в качестве примеров.
2. Второй вариант заключается в изменения временного расположения дальномерного кода передатчика в пределах подкадра. В частности, меняется временное положение ПСП передатчика в пределах подкадра. Только тот навигационный приемник, который знает правило чередования ПСП передатчика в пределах подкадра, способен использовать сигнал этого передатчика для навигации. Этот вариант предназначен для ВРК или для каждой отдельной несущей частоты при ЧРК-ВРК. Желательно, чтобы передатчики, имеющие общие зоны вещания, имели единый механизм изменения временного расположения своих дальномерных кодов для исключения взаимного наложения сигналов во времени. В отличие от системы-прототипа Locata правило чередования ПСП передатчиков в подкадре не является общеизвестным.
3. Третий вариант заключается в шифровании всего или части навигационного сообщения передатчика. В таком случае только тот навигационный приемник, который знает ключ (пароль) и алгоритм дешифрования навигационного сообщения передатчика, способен использовать данные из сообщения этого передатчика для навигации.
4. Четвертый вариант заключается в отсутствии такого навигационного сообщения в сигнале передатчика, которое бы позволяло навигационному приемнику автономно выполнять навигацию. При этом другие характеристики сигнала передатчика могут быть общеизвестны. В таком случае навигационный приемник может запрашивать необходимые ему данные у подсистемы управления, чтобы осуществлять навигацию. Навигационный приемник также может пересылать данные измерений навигационных сигналов передатчиков подсистеме управления и получать обратно результат навигации. Таким образом, только тот навигационный приемник, который имеет доступ к подсистеме управления, способен реализовать свою навигацию.
Также могут быть реализованы любые возможные комбинации перечисленных выше четырех вариантов защиты доступа. Если нет необходимости в защите навигационной системы от несанкционированного использования, то можно не использовать эти варианты. В таком случае навигационная система по аналогии с системой-прототипом может быть открытой (общедоступной) навигационной системой.
VI. Подсистема управления, авторизация навигационных приемников
Навигационная система может включать в себя подсистему управления для выполнения различных функций для управления работой передатчиков и/или для взаимодействия с навигационными приемниками. Для взаимодействия с навигационными приемниками подсистема управления может использовать систему связи. Такой системой связи может быть, например, система сотовой (мобильной) связи.
В свою очередь навигационные приемники могут содержать в своем составе модули связи для связи с подсистемой управления через заданную систему связи. Для получения необходимых данных для своей работы навигационный приемник через систему связи обращается к подсистеме управления. В случае успешной авторизации навигационного приемника в подсистеме управления с ним осуществляется установленное взаимодействие. В противном случае взаимодействие не осуществляется.
Для авторизации навигационного приемника в подсистеме управления могут быть использованы разные способы. В частности, наиболее очевидным представляется способ авторизации через систему сотовой (мобильной) связи. В этом случае модуль связи навигационного приемника осуществляет вызов подсистемы управления через систему связи. Подсистема управления проверяет номер вызывающего ее модуля связи навигационного приемника и принимает решение об авторизации или отказе в авторизации. Номера модулей связи тех навигационных приемников, которым разрешена авторизация, хранятся в подсистеме управления. Номера модулей связи в таком случае аналогичны номерам сотовых (мобильных) телефонов или их аналогам.
В частности, также возможен вариант обращения навигационного приемника через модуль связи и затем через сеть Интернет к серверу, принадлежащему подсистеме управления. В таком случае авторизация в сервере выполняется по установленным для этого правилам взаимодействия между сервером и навигационным приемником. Этот вариант аналогичен обращению навигационного приемника через сеть Интернет к системе поддержки типа A-GPS [1-2].
Для дешифровки зашифрованного навигационного сообщения передатчика навигационный приемник должен знать ключ (пароль) и знать алгоритм дешифровки этого навигационного сообщения. Ключи (пароли), алгоритмы дешифровки и другие соответствующие данные могут выдаваться пользователю навигационного приемника владельцем навигационной системы и/или передаваться через взаимодействие с подсистемой управления и/или рассылаться через навигационное сообщение передатчика.
В целом какой-либо конкретный механизм авторизации навигационного приемника в подсистеме управления и/или в навигационной системе в целом не является обязательным. Механизм авторизации исключает возможность несанкционированного использования навигационной системы. В случае открытой (общедоступной) навигационной системы авторизация также может осуществляться, но в этом случае любой навигационный приемник может авторизоваться в подсистеме управления или взаимодействовать с ней без авторизации.
VII. Работа навигационного приемника в навигационной системе
1. Первый вариант заключается в автономной работе навигационного приемника в навигационной системе. В этом случае подсистема управления ему не нужна. Навигационный приемник самостоятельно начинает работу, совершает поиск и обнаружение сигналов передатчиков, выполняет навигацию, завершает свою работу.
2. Второй вариант заключается во взаимодействии навигационного приемника с подсистемой управления. В этом случае навигационный приемник может получать параметры (данные) сигналов передатчиков для их обнаружения, обработки и для осуществления навигации, пересылать необходимые данные в подсистему управления, получать необходимые данные из подсистемы управления. При этом навигация может осуществляться в навигационном приемнике или результат навигации может передаваться в навигационный приемник от подсистемы управления.
При перемещении навигационного приемника в пространстве он может выходить из зоны вещания (действия) одних передатчиков навигационной системы и входить в зону вещания (действия) других передатчиков навигационной системы. В этом случае необходимо переключение работы навигационного приемника с сигналов одних передатчиков на сигналы других передатчиков, то есть, необходим хэндовер. Также навигационный приемник может в целом входить в зону вещания (действия) навигационной системы или начинать работу в зоне вещания (действия) навигационной системы. Также навигационный приемник может в целом выходить из зоны действия навигационной системы или завершать работу в зоне действия навигационной системы.
Возможны два обобщенных варианта хэндовера.
1. Автономный хэндовер. При этом навигационный приемник в состоянии самостоятельно осуществлять переключение своей работы. Это возможно при наличии в приемнике необходимой ему информации о параметрах сигналов тех передатчиков, в зоне действия которых он находится.
2. Неавтономный хэндовер. Такой хэндовер необходим в случаях, когда навигационный приемник не в состоянии самостоятельно осуществить переключение своей работы. Это возможно при отсутствии в приемнике необходимой ему информации о параметрах сигналов тех передатчиков, в зону действия которых он входит. Этот вариант хэндовера заключается во взаимодействии с подсистемой управления. Навигационный приемник в начале своей работы запрашивает через систему связи подсистему управления параметры сигналов передатчиков, в зоне действия которых он находится. При этом может определяться местоположение навигационного приемника. При этом навигационный приемник при необходимости также может извлекать данные из навигационных сообщений передатчиков. Подсистема управления решает, какие параметры сигналов каких передатчиков передать навигационному приемнику. Получив через систему связи необходимые данные от подсистемы управления, навигационный приемник начинает работать по заданному алгоритму. В случае перемещения навигационного приемника в пространстве он может попадать в зону действия других передатчиков. При этом он может запрашивать у подсистемы управления параметры их сигналов или подсистема управления может принимать решение и пересылать эти параметры и/или другие данные. При этом навигационный приемник при необходимости также может извлекать данные из навигационных сообщений передатчиков. Этот вариант хэндовера может также применяться в случае повторной работы навигационного приемника с полученными ранее данными, например, при повторном старте или повторном входе в зону действия навигационной системы.
В случае автономного хэндовера навигационный приемник извлекает необходимые ему данные из сообщений передатчиков и/или из других источников (например, из Интернета или из памяти навигационного приемника). Навигационные сообщения передатчиков могут содержать параметры сигналов других передатчиков (в том числе, соседних) и другие данные, позволяющие осуществлять автономный хэндовер. Другие источники могут содержать параметры сигналов других передатчиков (в том числе, соседних) и другие данные, позволяющие осуществлять автономный хэндовер. Автономный хэндовер возможен и в случае недостаточности данных в навигационном приемнике при осуществлении им самостоятельного поиска новых навигационных сигналов.
В случае неавтономного хэндовера определение передатчиков, необходимых навигационному приемнику для его работы может происходить при следующих обстоятельствах.
1. Навигационный приемник может самостоятельно определить необходимые ему для работы передатчики. Эти передатчики могут быть определены:
- из сообщений других передатчиков и/или по параметрам их сигналов;
- из сообщений этих же передатчиков и/или по параметрам их сигналов;
- по местоположению навигационного приемника и/или знанию расположения передатчиков.
Передатчики, необходимых навигационному приемнику для его работы также могут быть определены по любой возможной комбинации вышеперечисленных условий и/или по другим условиям.
2. Навигационный приемник может определить свои координаты способами, не связанными с возможностями его навигации. Тогда передатчики могут быть определены по местоположению навигационного приемника и знанию расположения передатчиков. В другом случае навигационный приемник передает свои координаты в подсистему управления, а она определяет, какие передатчики ему необходимы для работы.
3. Подсистема управления может установить координаты навигационного приемника, пославшего ей запрос о передаче данных, необходимых для его работы.
Навигационный приемник может определять свое местоположение способами не связанными с возможностями его навигации, также подсистема управления может получать это местоположение навигационного приемника от него самого или другим путем. Одним из вариантов определения такого местоположения являются возможности сетей сотовой (мобильной) связи определять местоположение сотовых (мобильных) телефонов [3]. В данном случае под сотовым (мобильным) телефоном нужно понимать соответствующий модуль связи навигационного приемника. Местоположение может использоваться в навигационном приемнике или пересылаться им в подсистему управления, или подсистема управления может получать его от системы связи.
Навигационный приемник может грубо (приблизительно) определять свое местоположение в автономном режиме по аналогии с использованием альманаха в спутниковых навигационных системах [1-3], если этот альманах передается в сообщении передатчиков и возможна соответствующая обработка сигналов этих передатчиков.
Навигационный приемник в качестве ИД передатчика может пересылать в подсистему управления любые данные, позволяющие ей однозначно определить передатчик по заранее установленному алгоритму взаимодействия.
Навигационный приемник может идентифицировать передатчик по его сообщению. Например, в сообщении передатчика передается номер передатчика или какие-либо другие данные, позволяющие навигационному приемнику и/или подсистеме управления однозначно определить этот передатчик.
Навигационный приемник, если это возможно, может идентифицировать передатчик по его сигналу. Например, по используемой в сигнале передатчика ПСП или по используемой несущей частоте передатчика и так далее.
В случае если навигационный приемник может идентифицировать передатчики, в зону действия которых он попадает, по принимаемым от них сигналам, то он может запрашивать подсистему управления параметры сигналов этих передатчиков. Это возможно при передаче в навигационном сообщении передатчика данных о соседних с ним передатчиках или в случае, если навигационный приемник может по сигналу одного передатчика определить его соседей. В таком случае приемник может принимать решение, какие передатчики ему нужны для работы, и запрашивать соответствующие данные у подсистемы управления.
В случае если навигационному приемнику известны зоны действия передатчиков, то он может, определяя свое местоположение, запрашивать у подсистемы управления параметры сигналов тех передатчиков, в зону действия которых он входит. В случае если навигационному приемнику известны зоны действия передатчиков, с сигналами которых он в данный момент работает, то он может, определяя свое местоположение и принимая решение о выходе из зон их действия, запрашивать подсистему управления параметры сигналов других передатчиков, в частности, запрашивать соседние передатчики. Зоны действия передатчиков могут храниться в памяти навигационного приемника, они могут заранее передаваться от подсистемы управления или поступать в навигационный приемник другим способом (например, через связь с Интернетом).
В общем случае соседним передатчиком по отношению к заданному передатчику может быть любой другой передатчик навигационной системы. Однако, желательно, чтобы для заданного передатчика его соседними передатчиками были наиболее близкие окружающие его в пространстве передатчики. Также желательно, чтобы заданный передатчик и соседний передатчик имели перекрывающиеся в пространстве зоны вещания для создания непрерывной зоны покрытия сигналами навигационной системы.
Зона действия передатчика может быть определена как некоторый радиус действия передатчика в заданной системе координат. Зона действия передатчика может быть определена некоторыми координатами или некоторой областью в заданном пространстве. Зона действия передатчика может быть определена другими способами.
Таким образом, если навигационному приемнику известны его текущие координаты и то, что он находится в зоне действия определенного передатчика, то он может запрашивать данные этого передатчика у подсистемы управления.
В случае автономного хэндовера, если навигационному приемнику известны его текущие координаты и то, что он находится в зоне действия определенного передатчика, то он может попытаться использовать сигнал этого передатчика для навигации.
Навигационный приемник может запрашивать данные других (например, соседних) передатчиков, если количество используемых им для навигации сигналов от разных передатчиков уменьшается до заданного числа.
Навигационный приемник может запрашивать данные других (например, соседних) передатчиков, если он находится на расстоянии большем, чем заданное от этого передатчика.
Навигационный приемник может запрашивать данные других (например, соседних) передатчиков, если количество передатчиков, сигналы которых он использует и удаленных от него на расстояние больше заданного, становится меньше заданного числа.
Навигационный приемник может запрашивать у подсистемы управления данные других передатчиков в любых других случаях, если это определено алгоритмом взаимодействия между навигационным приемником и подсистемой управления.
В случае если навигационный приемник запрашивает подсистему управления необходимые данные и подсистеме управления известно, что он при этом находится вне зоны действия (всех или менее чем некоторого заданного числа) передатчиков навигационной системы (вне сети), то подсистема управления может не удовлетворять запрос навигационного приемника. В ответ подсистема управления может передать навигационному приемнику информацию о том, что он вне сети. В случае если навигационному приемнику известно, что он вне сети, то он может не запрашивать подсистему управления. В этом случае он может также передавать в подсистему управления информацию об отсутствии его в сети.
В случае если навигационный приемник запрашивает подсистему управления необходимые данные и подсистеме управления известно, что он при этом выходит из зоны действия передатчиков навигационной системы (выходит из сети), то подсистема управления может не удовлетворять запрос навигационного приемника. В ответ подсистема управления может передать навигационному приемнику информацию о том, что он выходит из сети. В случае если навигационному приемнику известно, что он выходит из сети, то он может не запрашивать подсистему управления. В этом случае он может также передавать в подсистему управления информацию о процессе выхода из сети.
Процессом выхода из сети можно считать отсутствие передатчиков, данные которых могут быть переданы подсистемой управления в навигационный приемник или данные которых могут быть запрошены навигационным приемником, но еще не были переданы.
Для автономного и неавтономного хэндовера процессом выхода из сети можно считать отсутствие передатчиков, данные которых могут быть получены навигационным приемником, но еще не были им получены.
В случае срыва своей работы навигационный приемник может повторно запрашивать данные у подсистемы управления или не запрашивать их и использовать прежние данные, если они не устарели. Навигационный приемник может своевременно запрашивать данные передатчика, если они изменились или будут изменены.
В случае получения данных от подсистемы управления и невозможности с помощью них осуществить навигацию, навигационный приемник может сообщить об этом подсистеме управления. При этом навигационный приемник может повторно запрашивать необходимые ему данные по установленному алгоритму запросов. Подсистема управления в случае невозможности навигации навигационного приемника может пересылать ему данные повторно и/или пересылать новые данные. Режим повторного запроса данных навигационного приемника может определять подсистема управления и/или он содержится в навигационном сообщении (определяется из навигационных сообщений передатчиков) и/или может быть определен заранее.
Устаревание данных определяется по данным о времени действия этих данных (или времени окончания) и сверке их со временем, доступным навигационному приемнику.
Подсистема управления может передавать в навигационный приемник и/или он может запрашивать все или некоторые из характеристик любых заданных передатчиков, перечисленных в разделе IV.
Неиспользуемые данные для работы в навигационной системе навигационный приемник может хранить для повторного использования или может удалять. Неиспользуемые данные могут удалять только после их устаревания (невозможности повторного использования). Неиспользуемые данные могут удаляться навигационным приемником самостоятельно или по команде от подсистемы управления.
В частном случае автономный хэндовер или автономный режим работы можно определить по-другому: это случай, когда навигационный приемник получает данные от подсистемы управления без запроса и/или когда его запрос всегда должен быть удовлетворен подсистемой управления.
Подсистема управления может пересылать в навигационный приемник следующие данные или их эквиваленты (соответственно разделу V):
- характеристики используемых в сигналах передатчиков ПСП;
- информацию или алгоритмы смены используемых в сигналах передатчиков ПСП (например, алгоритмы для самостоятельного определения в навигационном приемнике используемых передатчиками ПСП в заданный момент времени);
- характеристики временного расположения в подкадрах используемых в сигналах передатчиков ПСП;
- информацию или алгоритмы смены временного расположения в подкадрах используемых в сигналах передатчиков ПСП (например, алгоритм для самостоятельного определения в навигационном приемнике времени начала передачи ПСП передатчиком в пределах подкадра);
- ключи (пароли) для дешифрования навигационных сообщений передатчиков;
- алгоритмы дешифрования навигационных сообщений передатчиков и/или информацию о характеристиках шифров навигационных сообщений передатчиков.
В целом в навигационный приемник должны быть заложены алгоритмы, позволяющие ему успешно работать в навигационной системе в автономном режиме (без подсистемы управления) и/или в неавтономном режиме (с подсистемой управления).
VIII. Взаимодействие с передатчиками
В одном из вариантов навигационной системы подсистема управления может управлять работой передатчиков. Здесь рассматривается только такое управление работой передатчиков, которое имеет отношение к работе навигационных приемников. Подсистема управления может передавать команды управления некоторым или всем передатчикам навигационной системы по отдельности. Для этого подсистема управления может быть соединена с каждым отдельным передатчиком системой связи. Команды управления от подсистемы управления передатчику могут изменять его сигнал.
Для соответствующего реагирования навигационного приемника на изменение принимаемого сигнала передатчика подсистема управления может своевременно передавать в навигационный приемник сообщение. Этого сообщения должно быть достаточно, чтобы навигационный приемник продолжил работать с сигналом передатчика после его изменения. Также подсистема управления может изменять навигационное сообщение передатчика с целью оповещения навигационных приемников об изменениях в сигнале одного или нескольких передатчиков. Команда от подсистемы управления может сообщать навигационному приемнику о необходимости принять обновленное навигационное сообщение передатчика. Оповещение через навигационное сообщение также может быть командой навигационному приемнику о необходимости запросить подсистему управления новые данные и/или принять от нее новые данные.
Обобщение описания разделов
Разделы I-VIII в совокупности дают множество комбинаций для реализации навигационной системы. Наиболее важными являются разделы V и VII, а также механизмы взаимодействия любого навигационного приемника с навигационной системой, в частности, с подсистемой управления. При реализации в навигационной системе характеристик одних разделов все остальные характеристики навигационной системы могут отличаться от описанных в других разделах. Таким образом, совместное исполнение именно таких характеристик, какие указаны в разделах I-VIII является необязательным и именно в таком виде понимается в формуле изобретения.
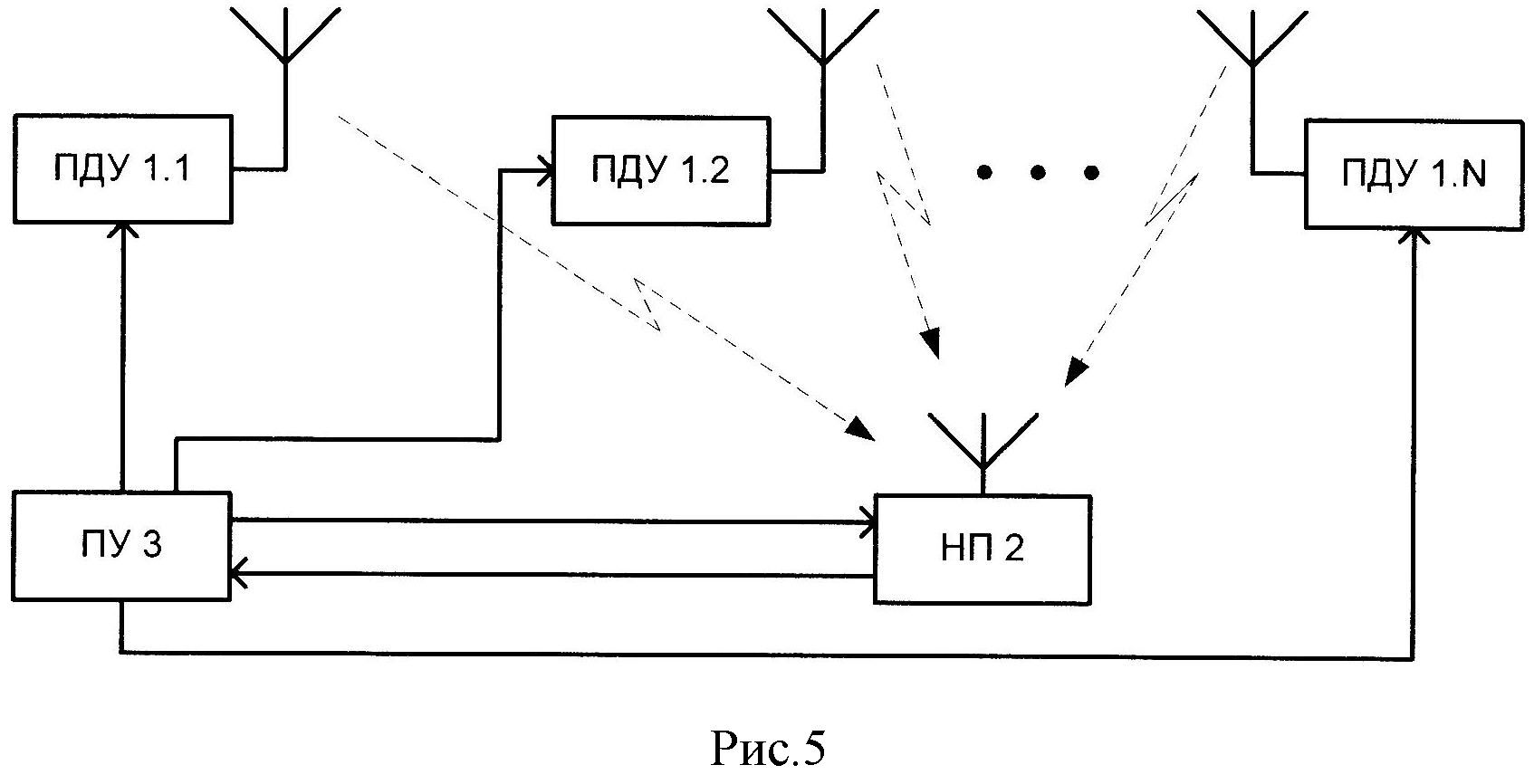
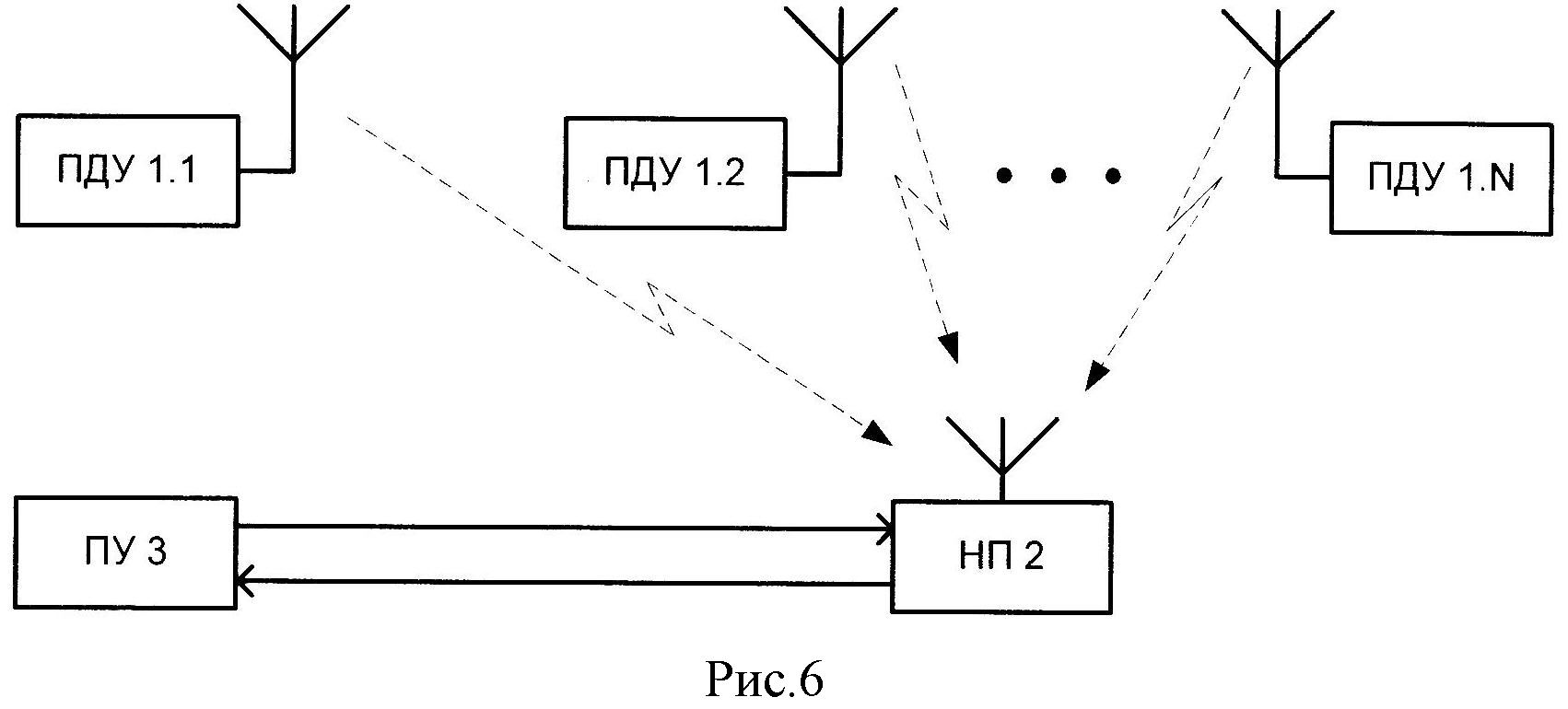
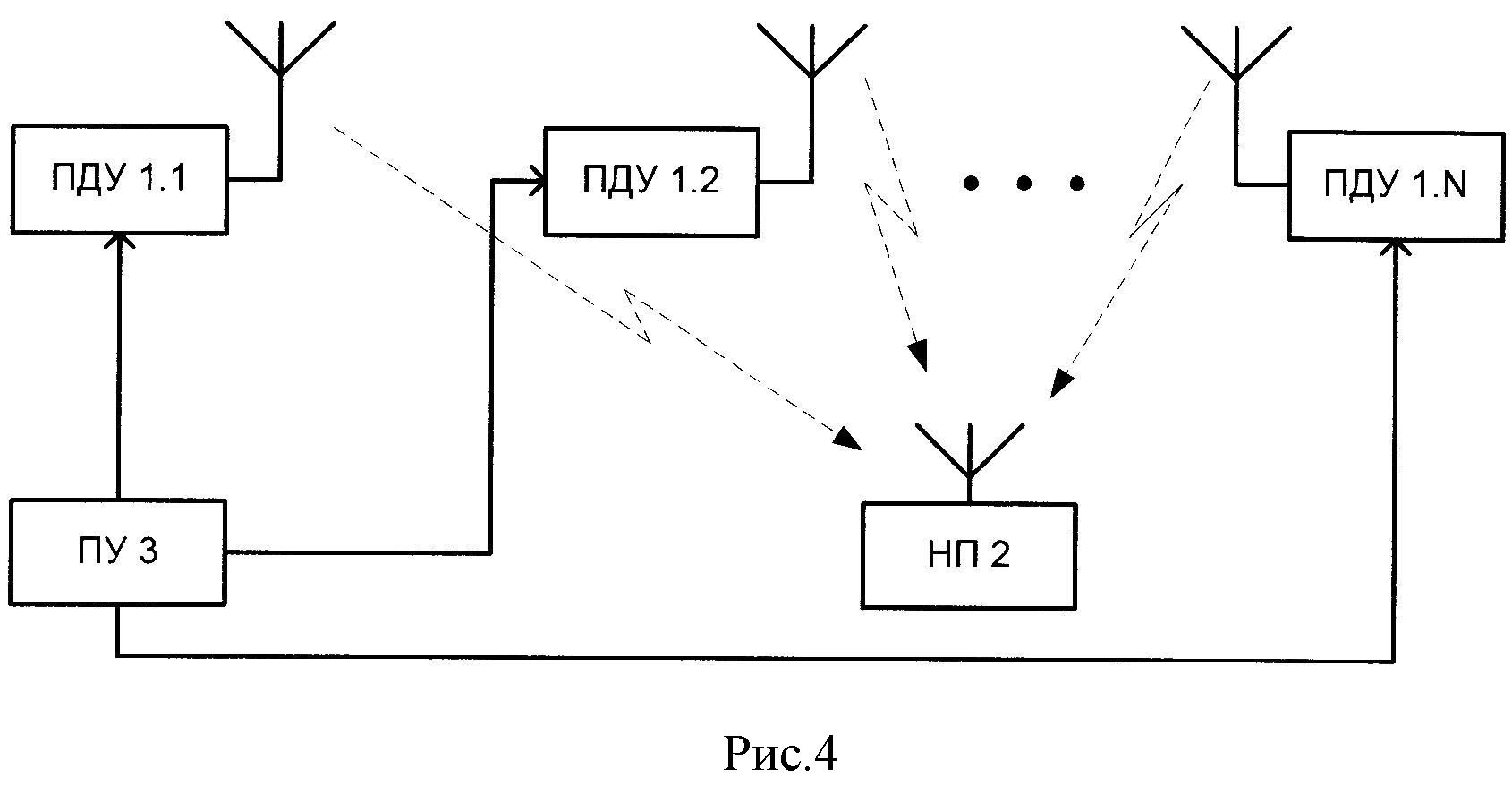
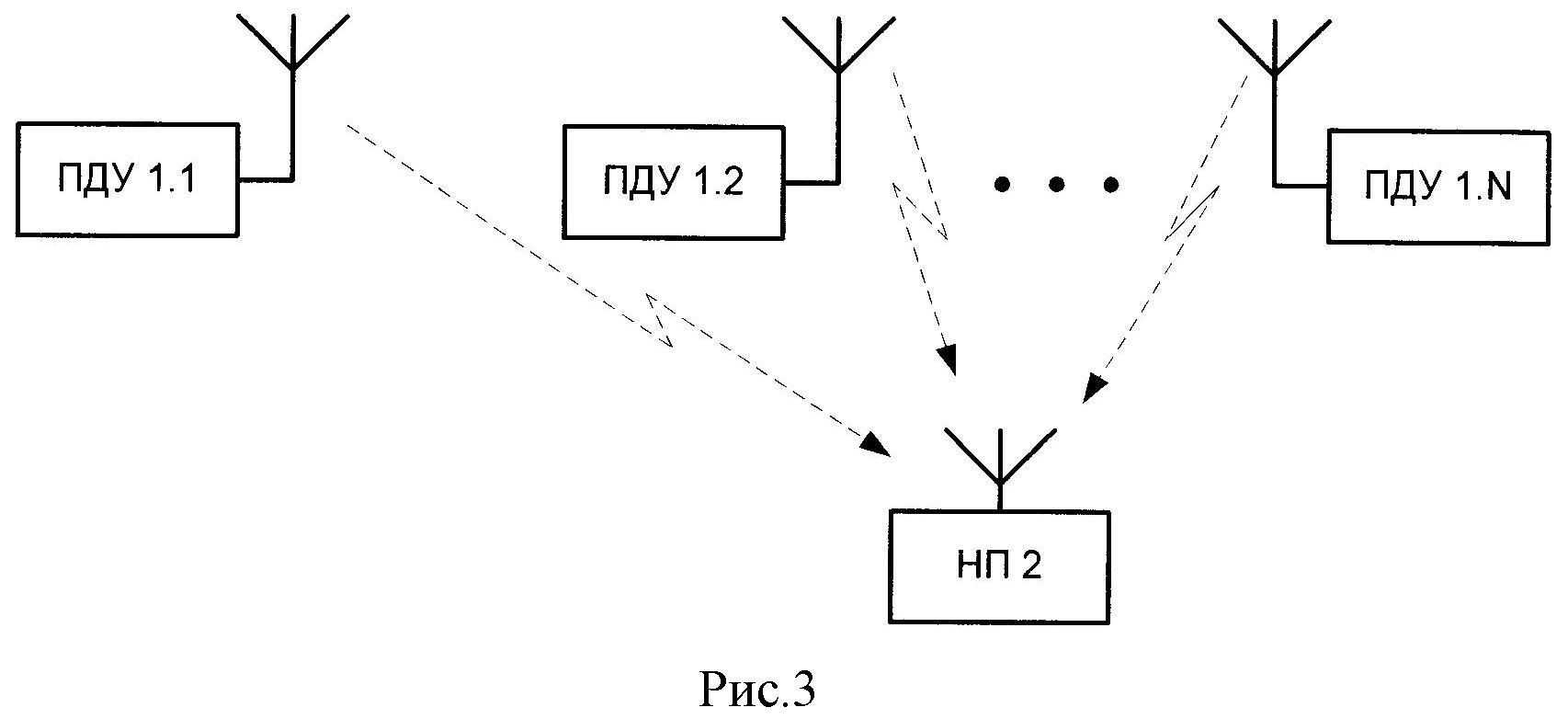
Навигационная система (рис. 3) состоит из нескольких передатчиков с номерами от 1.1 до 1.N (ПДУ 1.1…ПДУ 1.N), которые излучают сигналы для использования их в навигационных приемниках. Излучаемые сигналы показаны на рис. 3 и на других рисунках условно как прерывистые ломаные стрелки. Навигационный приемник 2 (НП 2) использует эти сигналы для осуществления своей навигации. Количество навигационных приемников, работающих в навигационной системе, теоретически не ограничено.
Подсистема управления 3 (ПУ 3) может взаимодействовать с передатчиками (рисунок 4) и/или с навигационными приемниками (рис. 5 и 6). Это взаимодействие показано (или может предполагаться) на рисунках как стрелки, идущие от ПУ 3 к другим устройствам или к ПУ 3 от других устройств.
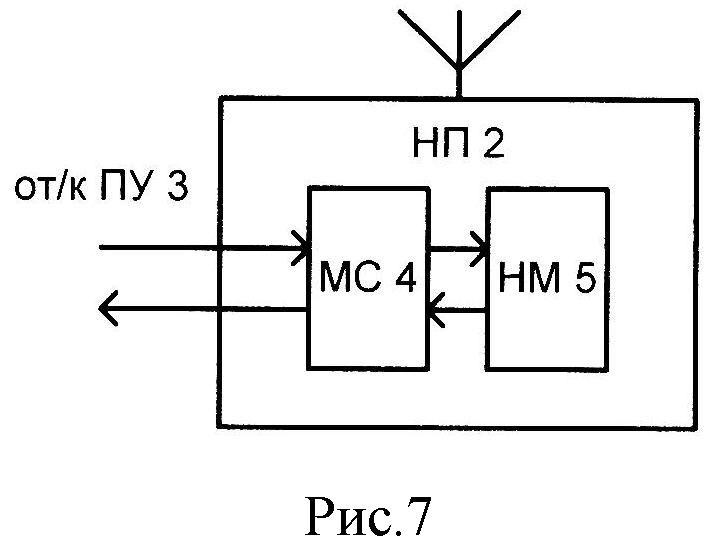
Навигационный приемник в случае взаимодействия с подсистемой управления состоит из модуля связи 4 (МС 4) и навигационного модуля 5 (НМ 5). Навигационный модуль выполняет прием и обработку навигационных сигналов. Навигационный модуль через модуль связи может взаимодействовать с подсистемой управления навигационной системы (рис. 7). Это взаимодействие показано на рис. 7 как стрелки, идущие от МС 4 к НМ 5, и наоборот.
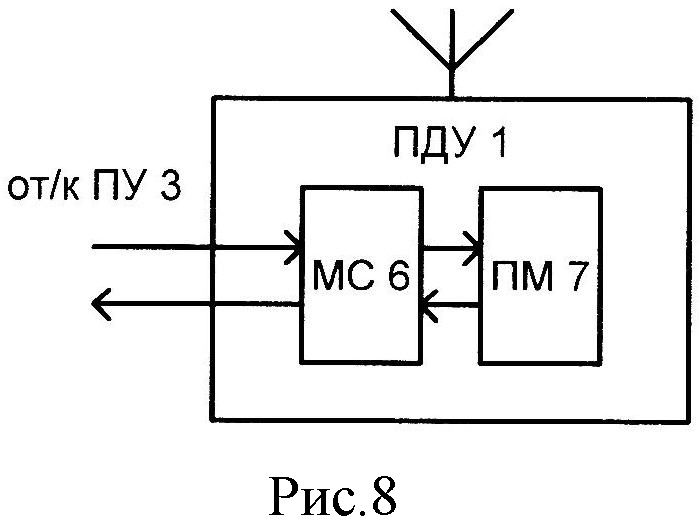
Передатчик (ПДУ 1) в случае использования подсистемы управления также содержит модуль связи 6 (МС 6) и передающий модуль (ПМ 7) для случая взаимодействия с ней (рис. 8). Это взаимодействие показано на рис. 8 как стрелки, идущие от МС 6 к ПМ 7, и наоборот.
Навигационный приемник в начале своей работы связывается через модуль связи с подсистемой управления и запрашивает данные, необходимые для его работы. Подсистема управления идентифицирует навигационный приемник, проверяет запрос навигационного приемника и, в случае положительного решения, передает приемнику запрошенные и/или другие данные. Навигационный приемник использует полученные данные для обработки навигационных сигналов передатчиков, при необходимости извлекает информацию из сигналов передатчиков и осуществляет навигацию. В процессе работы запросы навигационного приемника могут повторяться в соответствии с процедурой хэндовера, при потере сигнала и в других установленных случаях. При повторном включении навигационного приемника в работу он может использовать прежние данные, если они не устарели и сохранились в нем, или запрашивать заново данные у подсистемы управления. Подсистема управления при необходимости также управляет работой передатчиков, меняя режимы их работы, и при необходимости соответствующим образом оповещает навигационные приемники. Подсистема управление может передавать данные в передатчик для изменения его сигнала по установленному алгоритму взаимодействия. Подсистема управления также может сама инициировать связь с навигационными приемниками для передачи им необходимых данных для работы. Взаимодействие между навигационным приемником и подсистемой управления осуществляется по установленному для них алгоритму взаимодействия. В случае если нет необходимости связываться с подсистемой управления или она отсутствует, навигационный приемник может работать автономно. При этом данные и алгоритмы, необходимые ему для работы в навигационной системе могут быть заложены в него, и/или извлечены из сигналов передатчиков, и/или получены из других источников.
Осуществление навигации в навигационном приемнике может выполняться аналогично прототипу или известному уровню техники [1, 2, 4]. Для этого может использоваться слежение за задержкой и частотой сигналов передатчиков навигационной системы. Определяя псевдодальности и псевдоскорости, имея координаты передатчиков и временные параметры, навигационный приемник может определить свое местоположение в заданной системе координат, а по возможности и другие навигационные параметры.
Таким образом, в заявляемой навигационной системе есть механизмы защиты доступа, авторизация и хэндовер. Существует также возможность применения ЧРК, облегчающего архитектуру отдельных каналов навигационного приемника. При этом каждый канал может быть оптимизирован на сигнал заданного передатчика. Приведенное описание сущности изобретения позволяет установить достижение поставленной цели изобретения.
Литература
1. Understanding GPS: principles and applications/editors], Elliott Kaplan, Christopher Hegarty. - 2nd ed, 2006.
2. Frank van Diggelen. A-GPS: Assisted GPS, GNSS, and SBAS. Artech House, 2009.
3. Громаков Ю.А., Северин А.В., Шевцов В.А. Технологии определения местоположения в GSM и UMTS: Учеб. пособие. - М.: Эко-Трендз, 2005. - 144 с.: ил.
4. ICD-LOC-100A. LocataNet Positioning Control Document 2011. Locata Corp Pty Ltd, September 2011. www.locatacorp.com.
5. Патент США US 7616682 B2.
6. Патент США US 7848397 B2.
7. Патент США US 7859462 B2.


Способ селекции радиосигналов, устройство селекции радиосигналов и устройство определения подавления
Способ селекции радиосигналов, устройство селекции радиосигналов и устройство определения подавления

