Результат интеллектуальной деятельности: АППАРАТ ДЛЯ ПОМОЩИ ПРИ ХОДЬБЕ
Вид РИД
Изобретение
Изобретение относится к области медицины и протезирования, а именно к травматологии и ортопедии, а также может быть использовано в качестве аппаратов для помощи при ходьбе, используемых в туризме, спорте и при проведении спасательных и армейских операций.
Известны аппараты для помощи при ходьбе, выполненные в виде ортезов коленного сустава человека, используемых для протезирования нижних конечностей инвалидов - патенты (RU №2107476, опубл. 27.03.1998), (GB №2161387 A опубл. 16.01.1986), заявка EP №0144479 A3 опубл. 19.06.1985.
Данные устройства предназначены для копирования индивидуальной механики коленного сустава, не позволяют определить углы поворота и скорости вращения коленных суставов и моменты, развиваемые человеком в коленных суставах, и не имеют внешних источников энергии, позволяющих уменьшить нагрузки на мышечную систему человека при ходьбе.
Известны аппараты для помощи при ходьбе, выполненные в виде экзоскелетонов нижних конечностей, содержащие управляемые от микропроцессорной системы приводы коленного сустава, запитанные от аккумуляторов или иных энергетических источников - патенты и заявки США (US 7947004 B2 опубл. 24.05.2011, US 8070700 B2 публ. 06.12.2011, US 8057410 B2 опубл. 15.11.2011, US 20130102935 A1 опубл. 25.04.2013, US 20110105966 A1 опубл. 05.05.2011, US 20130150980 A1 опубл. 13.06.2013).
Данные аппараты обладают низкими функциональными возможностями и эргономическими характеристиками.
Наиболее близким к предлагаемому изобретению является аппарат для помощи при ходьбе по патенту США US 8057410 B2 опубл. 15.11.2011, содержащий экзоскелетон нижних конечностей, включающий тазовое звено со смонтированной на нем грузовой платформой, левый и правый тазобедренные шарнирные узлы, левую ножную опору, включающую левое бедренное звено, левый коленный шарнир, левое голенное звено, верхний конец которого через левый коленный шарнир соединен с нижним концом левого бедренного звена, левый голеностопный шарнирный узел, левую стопу, через левый голеностопный шарнирный узел соединенную с нижним концом левого голенного звена, правую ножную опору, включающую правое бедренное звено, правый коленный шарнир, правое голенное звено, верхний конец которого через правый коленный шарнир соединен с нижним концом правого бедренного звена, правый голеностопный шарнирный узел, правую стопу, через правый голеностопный шарнирный узел соединенную с нижним концом правого голенного звена, первую и вторую С-образные скобы крепления ноги человека к экзоскелетону, первый и второй поперечные элементы крепления передней части левой и, соответственно, правой ступни человека к левой и, соответственно, правой стопам, первый и второй датчики фиксации упора на пятке и, соответственно, носке левой стопы, третий и четвертый датчики фиксации упора на пятке и, соответственно, носке правой стопы, первый и второй датчики угла поворота левого и правого голенного звена относительно левого и, соответственно, правого бедренного звена левой и, соответственно, правой ножных опор, первый и второй моментные приводы, корпусы которых жестко смонтированы на левом и, соответственно, правом бедренных звеньях, а концы выходных валов соединены с соответствующими голенными звеньями, и бортовую вычислительную сеть, причем левый и правый тазобедренные шарнирные узлы выполнены с возможностью обеспечения вращения левого и, соответственно, правого бедренного звена вокруг трех осей координат, а левый и правый голеностопные шарнирные узлы выполнены с возможностью обеспечения вращения левой и, соответственно, правой стопы вокруг трех осей координат.
Данный аппарат также обладает низкими функциональными возможностями и эргономическими характеристиками.
Техническим результатом, на достижение которого направлено данное изобретение, является расширение функциональных возможностей и улучшение эргономических характеристик аппарата для помощи при ходьбе.
Для достижения указанного технического результата в известный аппарат для помощи при ходьбе, содержащий экзоскелетон нижних конечностей, включающий тазовое звено со смонтированной на нем грузовой платформой, левый и правый тазобедренные шарнирные узлы, левую ножную опору, включающую левое бедренное звено, левый коленный шарнир, левое голенное звено, верхний конец которого через левый коленный шарнир соединен с нижним концом левого бедренного звена, левый голеностопный шарнирный узел, левую стопу, через левый голеностопный шарнирный узел соединенную с нижним концом левого голенного звена, правую ножную опору, включающую правое бедренное звено, правый коленный шарнир, правое голенное звено, верхний конец которого через правый коленный шарнир соединен с нижним концом правого бедренного звена, правый голеностопный шарнирный узел, правую стопу, через правый голеностопный шарнирный узел соединенную с нижним концом правого голенного звена, первую и вторую С-образные скобы крепления ноги человека к экзоскелетону, первый и второй поперечные элементы крепления передней части левой и, соответственно, правой ступни человека к левой и, соответственно, правой стопам, первый и второй датчики фиксации упора на пятке и, соответственно, носке левой стопы, третий и четвертый датчики фиксации упора на пятке и, соответственно, носке правой стопы, первый и второй датчики угла поворота левого и правого голенного звена относительно левого и, соответственно, правого бедренного звена левой и, соответственно, правой ножных опор, первый и второй моментные приводы, корпусы которых жестко смонтированы на левом и, соответственно, правом бедренных звеньях, а концы выходных валов соединены с соответствующими голенными звеньями, и бортовую вычислительную сеть, причем левый и правый тазобедренные шарнирные узлы выполнены с возможностью обеспечения вращения левого и, соответственно, правого бедренного звена вокруг трех осей координат, а левый и правый голеностопные шарнирные узлы выполнены с возможностью обеспечения вращения левой и, соответственно, правой стопы вокруг трех осей координат, согласно изобретению дополнительно введены первый датчик скорости вращения левого голенного звена относительно левого бедренного звена левой ножной опоры, второй датчик скорости вращения правого голенного звена относительно правого бедренного звена правой ножной опоры, первый и второй датчики силы, смонтированные соответственно на передней и задней внутренних поверхностях первой С-образной скобы крепления, и третий и четвертый датчики силы, смонтированные соответственно на передней и задней внутренних поверхностях второй С-образной скобы крепления, первый ортез левого коленного сустава человека, выполненный с возможностью измерения угла поворота и скорости вращения левого коленного сустава и момента в левом коленном суставе, второй ортез правого коленного сустава человека, выполненный с возможностью измерения угла поворота и скорости вращения правого коленного сустава и момента в правом коленном суставе, при этом бортовая вычислительная сеть выполнена распределенной и с возможностью измерения и обработки данных с первого, второго, третьего и четвертого датчиков фиксации упора на пятках и носках левой и правой стоп, с первого и второго датчиков угла поворота, с первого и второго датчиков скорости вращения голенных звеньев относительно соответствующих бедренных звеньев и с первого, второго, третьего и четвертого датчиков силы, об углах поворота и скоростях вращения левых и правых коленных суставов и о моментах в левых и правых коленных суставах и возможностью формирования и подачи управляющих сигналов на управляющие входы первого и второго моментных приводов, а первая и вторая С-образные скобы крепления смонтированы на левом и, соответственно, правом бедренных звеньях экзоскелетона.
Кроме того, первый ортез левого коленного сустава человека включает фиксируемую на левом бедре человека посредством бандажей оболочку левого бедра, фиксируемую на левой голени посредством бандажей оболочку левой голени, первый вал и первую и вторую шарнирные шины, одними концами жестко соединенные с внешней стороны левого коленного сустава с оболочкой левого бедра и с оболочкой левой голени соответственно и через первый вал, жестко смонтированный одним концом на первой шине перпендикулярно ее поверхности, другими концами шарнирно соединяющие оболочку левого бедра со второй шарнирной шиной и, соответственно, с оболочкой левой голени с внешней стороны левого колена, второй вал и третью и четвертую шарнирные шины, одними концами жестко соединенные с внутренней стороны левого колена с оболочкой левого бедра и с оболочкой левой голени соответственно и через второй вал, жестко смонтированный одним концом на третьей шине перпендикулярно ее поверхности, другими концами шарнирно соединяющие оболочку левого бедра с четвертой шарнирной шиной и, соответственно, с оболочкой левой голени с внутренней стороны левого колена, причем первая, вторая, третья и четвертая шарнирные шины при выпрямленной левой ноге приблизительно параллельны, а оси первого и, соответственно, второго валов совпадают с осью левого коленного сустава, а также кинематически связанные с первым валом третий датчик угла поворота левого коленного сустава, третий датчик скорости вращения левого коленного сустава и первый датчик момента в левом коленном суставе.
Кроме того, второй ортез правого коленного сустава человека включает фиксируемую на правом бедре человека посредством бандажей оболочку правого бедра, фиксируемую на правой голени посредством бандажей оболочку правой голени, третий вал и пятую и шестую шарнирные шины, одними концами жестко соединенные с внешней стороны правого колена с оболочкой правого бедра и с оболочкой правой голени соответственно и через третий вал, жестко смонтированный одним концом на пятой шине перпендикулярно ее поверхности, другими концами шарнирно соединяющие оболочку правого бедра с шестой шарнирной шиной и, соответственно, с оболочкой правой голени с внешней стороны правого колена, четвертый вал и седьмую и восьмую шарнирные шины, одними концами жестко соединенные с внутренней стороны правого колена с оболочкой правого бедра и с оболочкой правой голени соответственно и через четвертый вал, жестко смонтированный одним концом на седьмой шине перпендикулярно ее поверхности, другими концами шарнирно соединяющие оболочку правого бедра с восьмой шарнирной шиной и, соответственно, с оболочкой правой голени с внутренней стороны правого колена, причем пятая, шестая, седьмая и восьмая шарнирные шины при выпрямленной правой ноге приблизительно параллельны, а оси третьего и четвертого валов совпадают с осью правого коленного сустава, а также кинематически связанные с третьим валом четвертый датчик угла поворота правого коленного сустава, четвертый датчик скорости вращения правого коленного сустава и второй датчик момента в правом коленном суставе.
Кроме того, бортовая вычислительная сеть содержит головной контроллер, общую шину, контроллеры и левой и, соответственно, правой ножных опор, через общую шину подключенные к головному контроллеру, при этом управляющий выход контроллера левой ножной опоры соединен с управляющим входом первого моментного привода, а управляющий выход контроллера правой ножной опоры соединен с управляющим входом второго моментного привода, а также контроллер первого ортеза, подключенный к выходам третьего датчика угла поворота, третьего датчика скорости вращения и первого датчика момента, контроллер левого коленного шарнира, подключенный к выходам первого датчика угла поворота и первого датчика скорости вращения левого коленного шарнира, контроллер левой стопы, подключенный к выходам первого и второго датчиков фиксации упора левой стопы, контроллер левого бедра, подключенный к выходам первого и второго датчиков силы, и первый канал обмена данными, соединяющий контроллер первого ортеза, контроллер левого коленного шарнира, контроллер левой стопы и контроллер левого бедра с контроллером левой ножной опоры, а также контроллер второго ортеза, подключенный к выходам четвертого датчика угла поворота, четвертого датчика скорости вращения и второго датчика момента, контроллер правого коленного шарнира, подключенный к выходам второго датчика угла поворота и второго датчика скорости вращения правого коленного шарнира, контроллер правой стопы, подключенный к выходам третьего и четвертого датчиков фиксации упора правой стопы, контроллер правого бедра, подключенный к выходам третьего и четвертого датчиков силы, и второй канал обмена данными, соединяющий контроллер второго ортеза, контроллер правого коленного шарнира, контроллер правой стопы и контроллер правого бедра с контроллером правой ножной опоры.
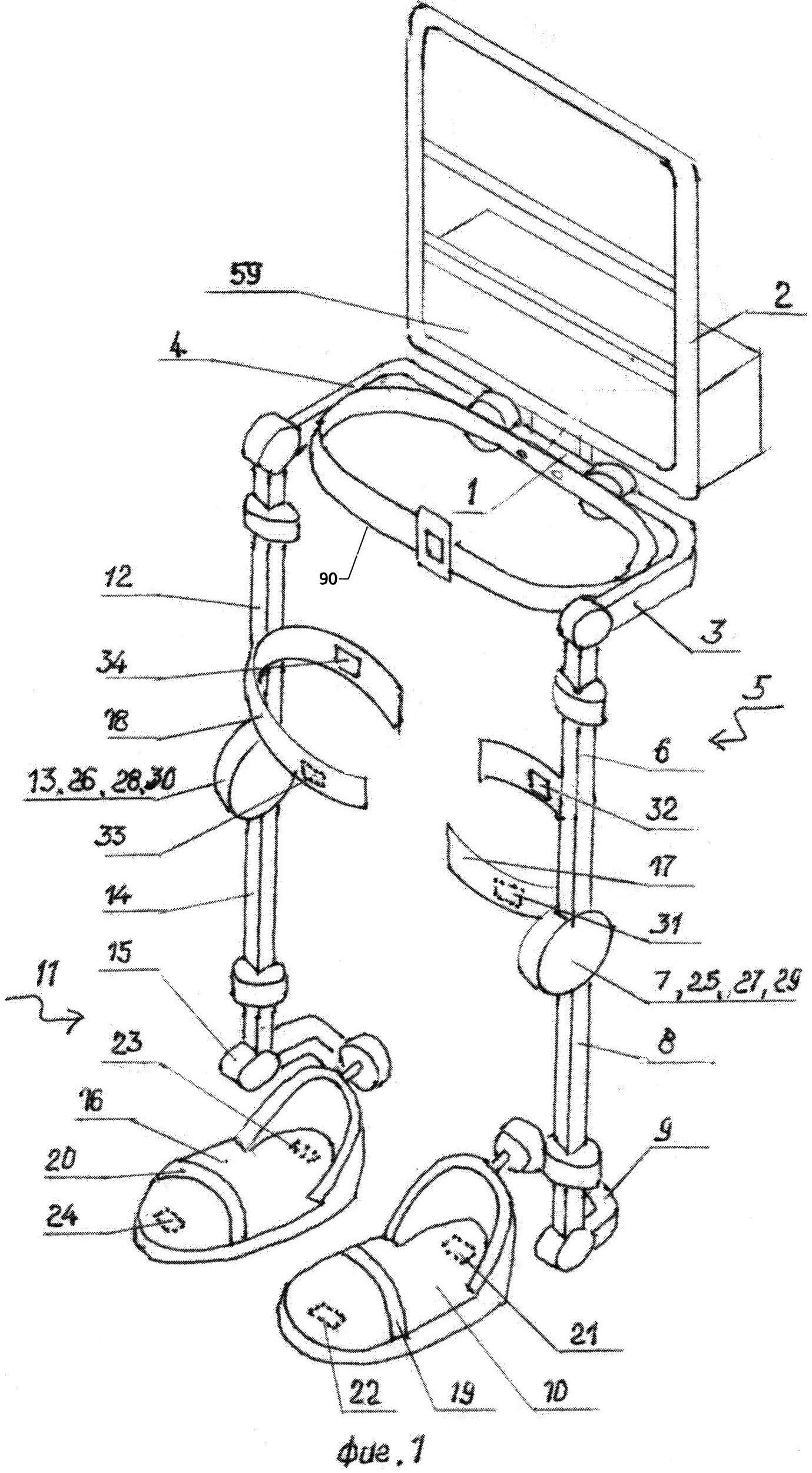
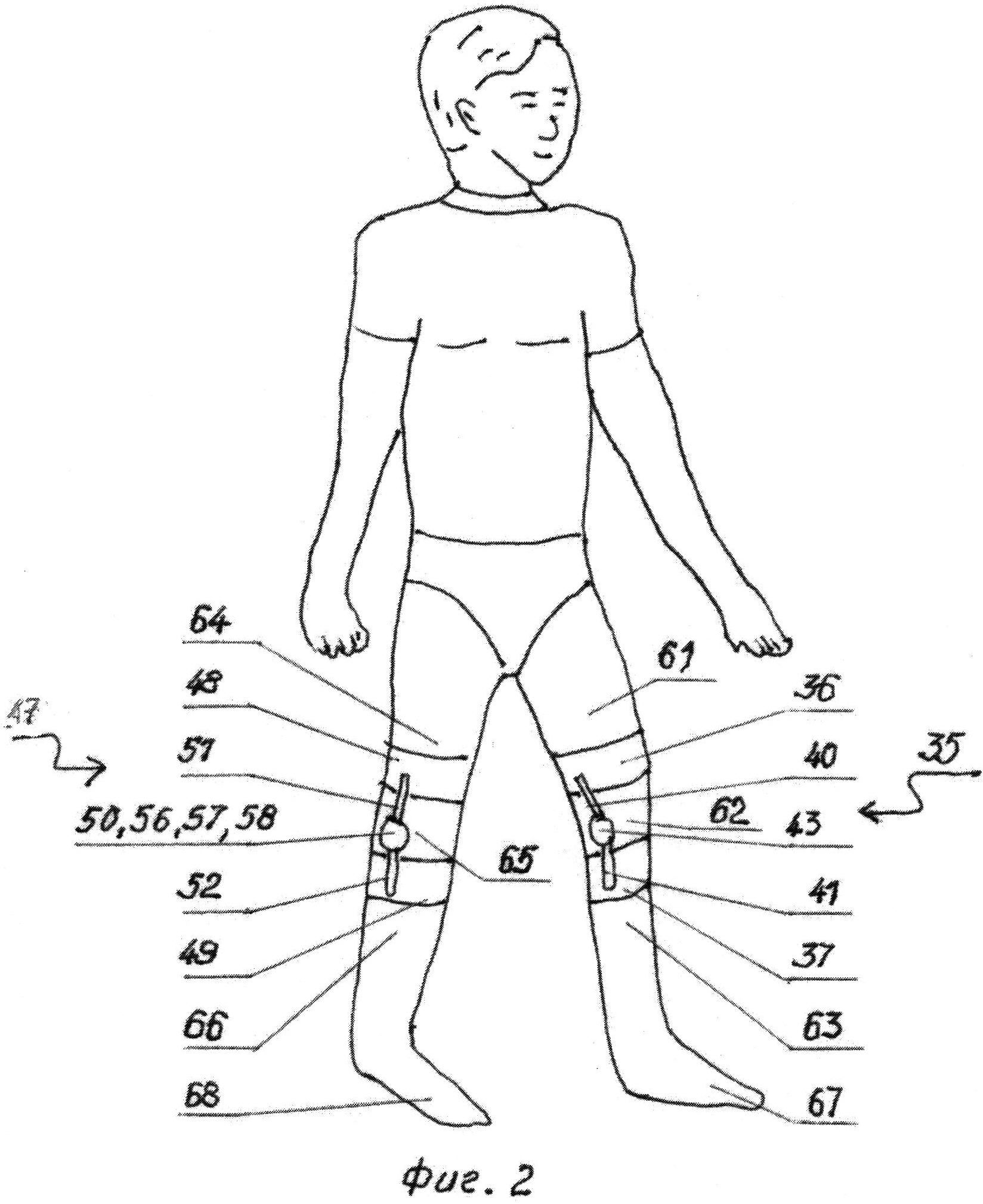
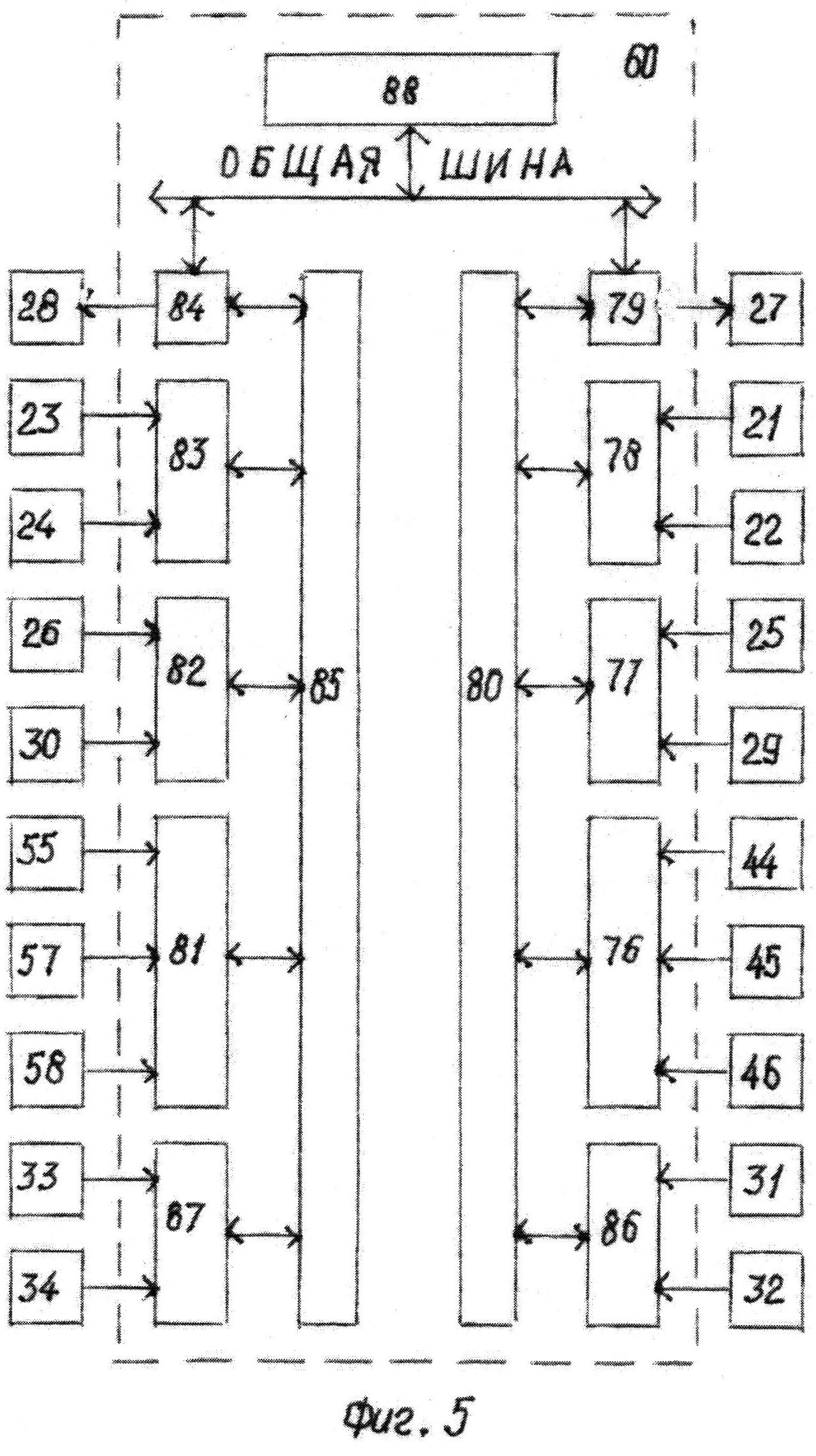
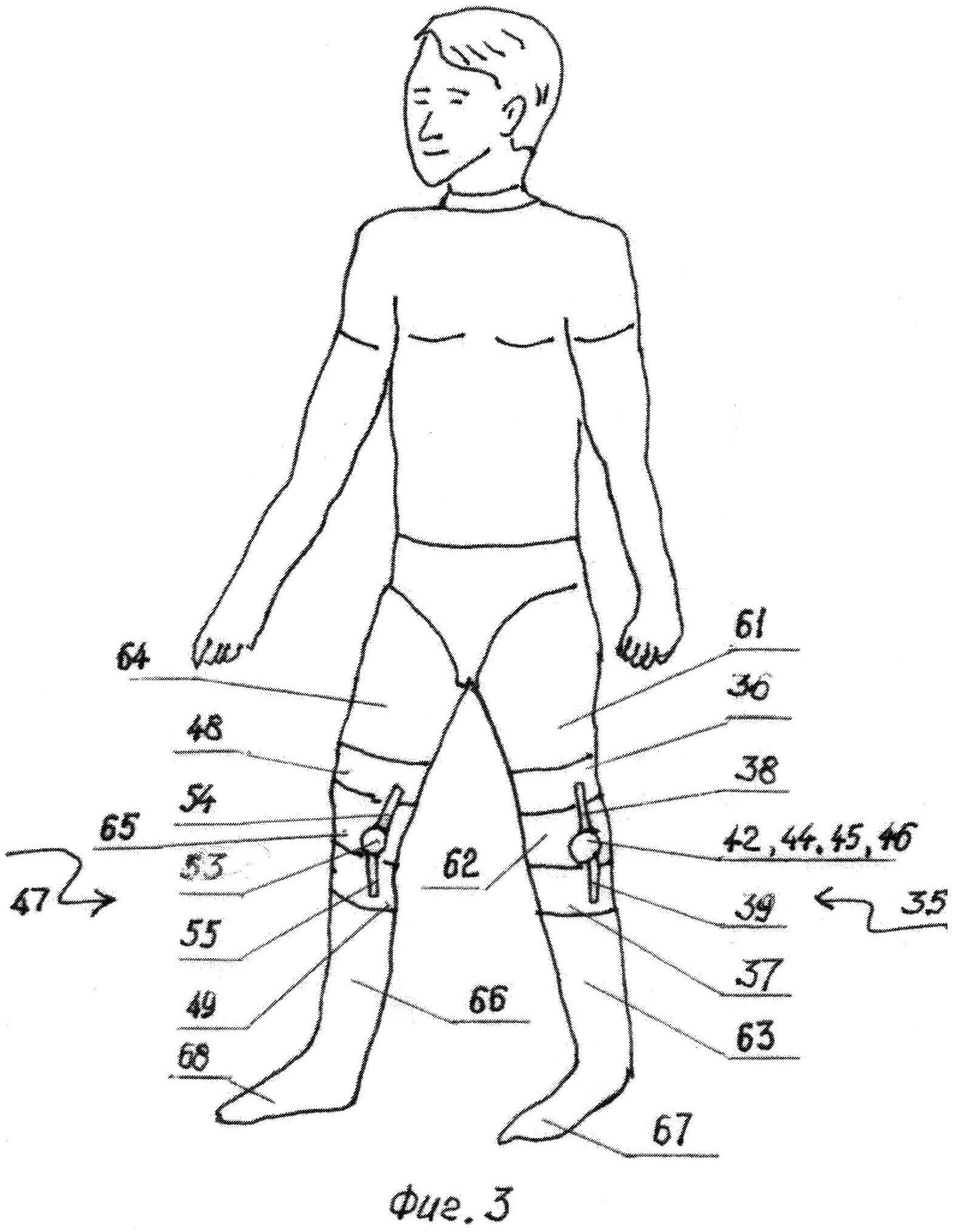
На фиг.1 изображен внешний вид экзоскелетона нижних конечностей, входящего в состав аппарата для помощи при ходьбе. На фиг.2 и 3 показан человек с надетыми на него ортезами коленных суставов. На фиг.4 показана условная кинематическая схема ортезов коленных суставов во фронтальной плоскости, проходящей через сагиттальные оси данных суставов, а на фиг.5 - функциональная схема бортовой вычислительной сети.
На фиг.1-5 обозначены: 1 - тазовое звено; 2 - грузовая платформа; 3 и 4 - левый и правый тазобедренные шарнирные узлы; 5 - левая ножная опора; 6 - левое бедренное звено; 7 - левый коленный шарнир; 8 - левое голенное звено; 9 - левый голеностопный шарнирный узел; 10 - левая стопа; 11 - правая ножная опора; 12 - правое бедренное звено; 13 - правый коленный шарнир; 14 - правое голенное звено; 15 - правый голеностопный шарнирный узел; 16 - правая стопа; 17 и 18 - первая и вторая С-образные скобы крепления ноги человека к экзоселетону; 19 и 20 - первый и второй поперечные элементы крепления передней части левой и, соответственно, правой ступни человека к левой 10 и, соответственно, правой 16 стопам; 21 и 22 - первый и второй датчики фиксации упора на пятке и, соответственно, носке левой 10 стопы; 23 и 24 - третий и четвертый датчики фиксации упора на пятке и, соответственно, носке правой 16 стопы; 25 и 26 - первый и второй датчики угла поворота левого 8 и правого 14 голенного звена относительно левого 6 и, соответственно, правого 12 бедренного звена левой 5 и, соответственно, правой 11 ножных опор; 27 и 28 - первый 27 и второй 28 моментные приводы; 29 - первый датчик скорости вращения левого 8 голенного звена относительно левого 6 бедренного звена левой 5 ножной опоры; 30 - второй датчик скорости вращения правого 14 голенного звена относительно правого 12 бедренного звена правой 11 ножной опоры; 31, 32, 33 и 34 - первый, второй, третий и, соответственно, четвертый датчики силы; 35 - первый ортез левого коленного сустава человека; 36 - оболочка левого бедра; 37 - оболочка левой голени; 38, 39, 40 и 42 - первая, вторая, третья и, соответственно, четвертая шарнирные шины; 42 и 43 - первый и второй валы; 44 - третий датчик угла поворота левого коленного сустава; 45 - третий датчик скорости вращения левого коленного сустава; 46 -первый датчик момента в левом коленном суставе; 47 - второй ортез правого коленного сустава; 48 - оболочка правого бедра; 49 - оболочка правой голени; 50 - третий вал; 51 и 52 - пятая и шестая шарнирные шины; 53 - четвертый вал; 54 и 55 - седьмая и восьмая шарнирные шины; 56 - четвертый датчик угла поворота правого коленного сустава; 57 - четвертый датчик скорости вращения правого коленного сустава; 58 - второй датчик момента в правом коленном суставе; 59 - энергетическая установка для питания моментных приводов; 60 - бортовая вычислительная сеть; 61 - левое бедро; 62 - левое колено; 63 - левая голень; 64 - правое бедро; 65 - правое колено; 66 - правая голень; 67 - левая ступня; 68 - правая ступня; 69 - бандаж; 70, 71 и 72 - оси левого коленного сустава и первого 42 и, соответственно, второго 43 валов; 73, 74 и 75 - оси правого коленного сустава и третьего 50 и, соответственно, четвертого 53 валов; 76 - контроллер первого ортеза; 77 - контроллер первого 25 датчика угла поворота и первого 29 датчика скорости вращения левого коленного шарнира экзоскелетона; 78 - контроллер первого 21 и второго 22 датчиков фиксации упора; 79 - контроллер левой ножной опоры; 80 - первый канал обмена данными; 81 - контроллер второго ортеза; 82 - контроллер второго 26 датчика угла поворота и второго 30 датчика скорости вращения левого коленного шарнира экзоскелетона; 83 - контроллер третьего 23 и четвертого 24 датчиков фиксации упора; 84 - контроллер правой ножной опоры; 85 - второй канал обмена данными; 86 - контроллер первого 31 и второго 32 датчиков силы; 87 - контроллер третьего 33 и четвертого 34 датчиков силы; 88 - головной контроллер; 89 - общая шина, 90 - пояс для крепления тазового звена 1 экзоскелетона к корпусу пользователя.
Аппарат для помощи при ходьбе содержит экзоскелетон нижних конечностей, включающий тазовое звено 1 со смонтированной на нем грузовой платформой 2, левый 3 и правый 4 тазобедренные шарнирные узлы, левую 5 ножную опору, включающую левое 6 бедренное звено, левый 7 коленный шарнир, левое 8 голенное звено, верхний конец которого через левый 7 коленный шарнир соединен с нижним концом левого 6 бедренного звена, левый 9 голеностопный шарнирный узел, левую 10 стопу, через левый 9 голеностопный шарнирный узел соединенную с нижним концом левого 8 голенного звена, правую 11 ножную опору, включающую правое 12 бедренное звено, правый 13 коленный шарнир, правое 14 голенное звено, верхний конец которого через правый 13 коленный шарнир соединен с нижним концом правого 12 бедренного звена, правый 15 голеностопный шарнирный узел, правую 16 стопу, через правый 15 голеностопный шарнирный узел соединенную с нижним концом правого 14 голенного звена, первую 17 и вторую 18 С-образные скобы крепления ноги человека к экзоскелетону, первый 19 и второй 20 поперечные элементы крепления передней части левой и, соответственно, правой ступни человека к левой 10 и, соответственно, правой 16 стопам, первый 21 и второй 22 датчики фиксации упора на пятке и, соответственно, носке левой 10 стопы, третий 23 и четвертый 24 датчики фиксации упора на пятке и, соответственно, носке правой 16 стопы, первый 25 и второй 26 датчики угла поворота левого 8 и правого 14 голенного звена относительно левого 6 и, соответственно, правого 12 бедренного звена левой 5 и, соответственно, правой 11 ножных опор, первый 27 и второй 28 моментные приводы, корпусы которых жестко смонтированы на левом 6 и, соответственно, правом 12 бедренных звеньях, а концы выходных валов соединены с соответствующими голенными звеньями 8 и 14, бортовую вычислительную сеть 60, причем левый 3 и правый 4 тазобедренные шарнирные узлы выполнены с возможностью обеспечения вращения левого 6 и, соответственно, правого 12 бедренного звена вокруг трех осей координат, а левый 9 и правый 15 голеностопные шарнирные узлы выполнены с возможностью обеспечения вращения левой 10 и, соответственно, правой 16 стопы вокруг трех осей координат.
Кроме того, аппарат для помощи при ходьбе содержит первый 29 датчик скорости вращения левого 8 голенного звена относительно левого 6 бедренного звена левой 5 ножной опоры, второй 30 датчик скорости вращения правого 14 голенного звена относительно правого 12 бедренного звена правой 11 ножной опоры, первый 31 и второй 32 датчики силы, смонтированные соответственно на передней и задней внутренних поверхностях первой 17 С-образной скобы крепления, и третий 33 и четвертый 34 датчики силы, смонтированные соответственно на передней и задней внутренних поверхностях второй 18 С-образной скобы крепления, первый 35 ортез левого коленного сустава человека, выполненный с возможностью измерения угла поворота и скорости вращения левого коленного сустава и момента в левом коленном суставе, второй 47 ортез правого коленного сустава человека, выполненный с возможностью измерения угла поворота и скорости вращения правого коленного сустава и момента в правом коленном суставе, при этом бортовая вычислительная сеть 59 выполнена распределенной и с возможностью измерения и обработки данных с первого 21, второго 22, третьего 23 и четвертого 24 датчиков фиксации упора на пятках и носках левой 10 и правой 16 стоп, с первого 25 и второго 26 датчиков угла поворота, с первого 29 и второго 30 датчиков скорости вращения голенных звеньев 8 и 14 относительно соответствующих бедренных звеньев 6 и 12, с первого 31, второго 32, третьего 33 и четвертого 34 датчиков силы, об углах поворота и скоростях вращения левых и правых коленных суставов и о моментах в левых и правых коленных суставах и возможностью формирования и подачи управляющих сигналов на управляющие входы первого 27 и второго 28 моментных приводов, а первая 17 и вторая 18 С-образные скобы крепления смонтированы на левом 6 и, соответственно, правом 12 бедренных звеньях экзоскелетона.
Кроме того, первый 35 ортез левого коленного сустава человека включает фиксируемую на левом 61 бедре человека посредством бандажей 69 оболочку 36 левого 61 бедра, фиксируемую на левой 63 голени посредством бандажей 69 оболочку 37 левой 63 голени, первый 42 вал и первую 38 и вторую 39 шарнирные шины, одними концами жестко соединенные с внешней стороны левого 62 коленного сустава с оболочкой 36 левого 61 бедра и с оболочкой 37 левой 63 голени соответственно и через первый вал 42, жестко смонтированный одним концом на первой 38 шине перпендикулярно ее поверхности, другими концами шарнирно соединяющие оболочку 36 левого 61 бедра со второй 39 шарнирной шиной и, соответственно, с оболочкой 37 левой голени с внешней стороны левого 62 коленного сустава, второй 43 вал и третью 40 и четвертую 41 шарнирные шины, одними концами жестко соединенные с внутренней стороны левого 62 коленного сустава с оболочкой 36 левого 61 бедра и с оболочкой 37 левой 63 голени соответственно и через второй 43 вал, жестко смонтированный одним концом на третьей 40 шине перпендикулярно ее поверхности, другими концами шарнирно соединяющие оболочку 36 левого 61 бедра с четвертой 41 шарнирной шиной и, соответственно, с оболочкой 37 левой голени с внутренней стороны левого 62 колена, причем первая 38, вторая 39, третья 40 и четвертая 41 шарнирные шины при выпрямленной левой ноге приблизительно параллельны, а оси 71 и 72 первого 42 и, соответственно, второго 43 валов совпадают с осью 70 левого коленного сустава, а также кинематически связанные с первым 42 валом третий 44 датчик угла поворота левого коленного сустава, третий 45 датчик скорости вращения левого коленного сустава и первый 46 датчик момента в левом коленном суставе.
Кроме того, второй 47 ортез правого коленного сустава человека включает фиксируемую на правом 64 бедре человека посредством бандажей 69 оболочку 48 правого 64 бедра, фиксируемую на правой 66 голени посредством бандажей 69 оболочку 49 правой 66 голени, третий 50 вал и пятую 51 и шестую 52 шарнирные шины, одними концами жестко соединенные с внешней стороны правого 65 колена с оболочкой 48 правого 64 бедра и с оболочкой 49 правой 66 голени соответственно и через третий вал 50, жестко смонтированный одним концом на пятой 51 шине перпендикулярно ее поверхности, другими концами шарнирно соединяющие оболочку 48 правого 64 бедра с шестой 52 шарнирной шиной и, соответственно, с оболочкой 49 правой голени с внешней стороны правого 65 колена, четвертый 53 вал и седьмую 54 и восьмую 55 шарнирные шины, одними концами жестко соединенные с внутренней стороны правого 65 колена с оболочкой 48 правого 64 бедра и с оболочкой 49 правой 66 голени соответственно и через четвертый 53 вал, жестко смонтированный одним концом на седьмой 54 шине перпендикулярно ее поверхности, другими концами шарнирно соединяющие оболочку 48 правого 64 бедра с восьмой 55 шарнирной шиной и, соответственно, с оболочкой 49 правой голени с внутренней стороны правого 65 колена, причем пятая 51, шестая 52, седьмая 54 и восьмая 55 шарнирные шины при выпрямленной правой ноге приблизительно параллельны, а оси 74 и 75 третьего 50 и, соответственно, четвертого 53 валов совпадают с осью 73 правого коленного сустава, а также кинематически связанные с третьим 50 валом четвертый 56 датчик угла поворота правого коленного сустава, четвертый 57 датчик скорости вращения правого коленного сустава и второй 58 датчик момента в правом коленном суставе,
Кроме того, бортовая вычислительная сеть 60 содержит головной контроллер 88, общую шину 89, контроллеры 79 и 84 левой 5 и, соответственно, правой 11 ножных опор, через общую шину 89 подключенные к головному 88 контроллеру, при этом управляющий выход контроллера 79 левой 5 ножной опоры соединен с управляющим входом первого 27 моментного привода, а управляющий выход контроллера 84 правой 11 ножной опоры соединен с управляющим входом второго 28 моментного привода, а также контроллер 76 первого 35 ортеза, подключенный к выходам третьего 44 датчика угла поворота, третьего 45 датчика скорости вращения и первого 46 датчика момента, контроллер 77 левого 7 коленного шарнира, подключенный к выходам первого датчика 25 угла поворота и первого датчика 29 скорости вращения левого 7 коленного шарнира, контроллер 78 левой стопы 10, подключенный к выходам первого 21 и второго 22 датчиков фиксации упора левой стопы 10, контроллер 86 левого 6 бедра, подключенный к выходам первого 31 и второго 32 датчиков силы, и первый 80 канал обмена данными, соединяющий контроллер 76 первого 35 ортеза, контроллер 77 левого 7 коленного шарнира, контроллер 78 левой стопы 10 и контроллер 86 левого 61 бедра с контроллером 79 левой 5 ножной опоры, а также контроллер 81 второго 47 ортеза, подключенный к выходам четвертого 55 датчика угла поворота, четвертого 57 датчика скорости вращения и второго 58 датчика момента, контроллер 82 правого 13 коленного шарнира, подключенный к выходам второго датчика 26 угла поворота и второго датчика 30 скорости вращения правого 13 коленного шарнира, контроллер 83 правой стопы 16, подключенный к выходам третьего 23 и четвертого 24 датчиков фиксации упора правой стопы 16, контроллер 87 правого 64 бедра, подключенный к выходам третьего 33 и четвертого 34 датчиков силы, и второй 85 канал обмена данными, соединяющий контроллер 81 второго 47 ортеза, контроллер 82 правого 13 коленного шарнира, контроллер 83 правой стопы 16 и контроллер 87 правого 64 бедра с контроллером 84 правой 11 ножной опоры.
Аппаратом для помощи при ходьбе пользуются следующим образом.
Пользователь аппарата надевает на левое 62 и правое 65 колено первый 35 и, соответственно, второй 47 ортезы, стремясь совместить оси 71 и 72 валов 42 и 43, соответственно, с осью 70 левого коленного сустава, а оси 74 и 75 валов 50 и 53, соответственно, с осью 73 правого коленного сустава. Затем при помощи бандажей 69 он фиксирует оболочки 36 и 37 левого бедра и левой голени на левом бедре 61 и левой голени 63 соответственно. Аналогичным образом, с помощью бандажей 69 пользователь фиксирует оболочки 48 и 49 правого бедра 64 и правой голени 66 на правом бедре 64 и правой голени 66 соответственно.
Затем пользователь надевает экзоскелетон и фиксирует его на теле: на корпусе с помощью пояса 90; левое 6 и правое 12 бедренные звенья - на левом 61 и правом 64 бедре соответственно, при помощи первой 17 и, соответственно, второй 18 С-образных скоб крепления; переднюю часть левой 10 и правой 16 стопы - на передней части левой 67 и, соответственно, правой 68 ступни первым 19 и, соответственно, вторым 20 поперечными элементами крепления.
После этого пользователь с помощью разъемов (на фиг.5 не показаны) подключает контроллеры 76 и 81 первого 35 и, соответственно, второго 47 ортезов к первому 80 и, соответственно, второму 85 каналам обмена данными. В результате контроллеры 79 и 84 левой 5 и правой 11 ножных опор и, следовательно, и головной контроллер 60 распределенной бортовой вычислительной сети 60 получают возможность сбора и обработки данных с первого 21, второго 22, третьего 23 и четвертого 24 датчиков фиксации упора на пятках и носках левой 10 и правой 16 стоп, с первого 25 и второго 26 датчиков угла поворота, с первого 29 и второго 30 датчиков скорости вращения голенных звеньев 8 и 14 относительно соответствующих бедренных звеньев 6 и 12, с первого 31, второго 32, третьего 33 и четвертого 34 датчиков силы, а также с установленных на первом 35 ортезе третьего 44 датчика угла поворота левого коленного сустава, третьего 45 датчика скорости вращения левого коленного сустава и первого 46 датчика момента в левом коленном суставе и с установленного на втором ортезе 47 четвертого датчика 56 угла поворота правого коленного сустава, четвертого датчика 57 скорости вращения правого коленного сустава и второго 58 датчика момента в правом коленном суставе.
Полученные данные с третьего 44 датчика угла поворота левого коленного сустава, третьего 45 датчика скорости вращения левого коленного сустава о желаемых углах и скоростях вращения левого коленного сустава и с первого 25 датчика угла поворота и с первого 29 датчика скорости вращения левого 8 голенного звена относительно левого 6 бедренного звена левой 5 ножной опоры о текущих значениях угла и скорости вращения левого 7 коленного шарнира обеспечивают возможность головному контроллеру 88 в соответствии с заложенным в нем алгоритмом управления вычислить значение управляющего сигнала, а контроллеру 79 левой 5 ножной опоры сформировать и подать этот сигнал на управляющий вход первого 27 моментного привода.
Аналогично, полученные данные с четвертого 55 датчика угла поворота правого коленного сустава, четвертого 57 датчика скорости вращения правого коленного сустава о желаемых углах и скоростях вращения правого коленного сустава и с второго 26 датчика угла поворота и с второго 30 датчика скорости вращения правого 14 голенного звена относительно правого 12 бедренного звена правой 11 ножной опоры о текущих значениях угла и скорости вращения правого 13 коленного шарнира обеспечивают возможность головному контроллеру 88 в соответствии с заложенным в нем алгоритмом управления вычислить значение управляющего сигнала, а контроллеру 84 правой 11 ножной опоры сформировать и подать этот сигнал на управляющий вход второго 28 моментного привода.
Таким образом, в предлагаемом аппарате для помощи при ходьбе обеспечивается движение коленных шарниров 7 и 13 в следящем режиме, то есть близкое к естественному, что улучшает эргономические характеристики аппарата. Кроме того, данные, полученные с первого 21, второго 22, третьего 23 и четвертого 24 датчиков фиксации упора на пятках и носках левой 10 и правой 16 стоп, с первого 31, второго 32, третьего 33 и четвертого 34 датчиков силы, а также с установленного на первом 35 ортезе первого 46 датчика момента в левом коленном суставе и с установленного на втором ортезе 47 второго 58 датчика момента в правом коленном суставе, могут быть использованы для оценки, изучения, диагностики отклонения от нормы и/или лечения нарушений двигательных функций ножных конечностей пользователя, что расширяет функциональные возможности аппарата.
Электрохимический способ получения наноразмерных структур оксида титана (iv)
Джозефсоновский магнитный поворотный вентиль
Диамиды 4,7-дизамещенных 1,10-фенантролин-2,9-дикарбоновых кислот, способ их получения и экстракционная смесь на их основе
Магнитоэлектрореологический эластомер
Антикоагулянтный, антитромбоцитарный и фибриндеполимеризационный комплекс на основе гепарина, способ его получения и применение
Способ получения энантиомерно чистых (s)-аминокислот на основе комплекса [(s)-bpb-gly]ni(ii), напрямую связанных с фуллереновым ядром через α-углеродный атом, в форме хиральных (a) и (c) 1,4-аддуктов [60]фуллерена
Средство, обладающее нейропротекторными свойствами в эксперименте и способ его получения
Способ отклонения тепловой кумулятивной струи расплавленного металла и образованного ей канала на металлической поверхности катода в дуговом импульсном разряде при взрыве проволочки между электродами действием поперечного магнитного поля
Способ создания образцов с заранее заданной термо-эдс, предназначенных для преобразования тепловой энергии в электрическую
Фармацевтическая композиция на основе β-модификации 2,3-бис-(гидроксиметил)хиноксалин-n,n'-диоксида и способ её получения

