Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ДНА МНОГОЛУЧЕВЫМ ЭХОЛОТОМ
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и предназначено для использования в многолучевых эхолотах (МЛЭ) для измерения координат отражающего объекта и определения рельефа дна.
Для измерения глубины места под движущимся судном используют промерные эхолоты. Промерные эхолоты подразделяются на однолучевые, которые измеряют глубину места непосредственно под судном, и многолучевые, которые предназначены для измерения глубины не только под судном, но и на значительных расстояниях от него.
Достаточно подробно принципы работы многолучевого эхолота рассмотрены в отечественной литературе А.В. Богородский, Д.Б. Островский «Гидроакустические навигационные и поисково-обследовательские средства». СПб., 2009 г. Изд. ЛЭТИ с.116-122, а также Ю.Л. Корякин, С.Л. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» СПб., «Наука», 2004 г., с.320-327.
Поскольку морская среда по своим гидрофизическим характеристикам имеет существенную вертикальную изменчивость, переменную в пространстве и во времени, то для определения глубин с требуемой точностью необходимо достоверно знать вертикальное распределение скорости звука на всей обследуемой акватории. Однако постоянный мониторинг распределения скорости звука по глубине в процессе съемки является весьма затратным. Применяя многолучевой эхолот в существенно изменчивой среде, следует учитывать наличие эффекта рефракции наклонных лучей, что приводит к появлению параллакса, когда определяемое по прямой положение отражающей точки отличается от истинного. Ошибка для каждого наклонного луча может оказаться существенной. В результате наблюдаемый профиль дна будет искажен относительно реального. Этот эффект тем больше, чем шире угловой сектор обзора МЛЭ и больше полоса обзора. С учетом эффекта параллакса для получения достоверных картографических материалов планирование галсов проводится таким образом, чтобы обеспечить значительную площадь перекрытия промерных полос. В этом случае участок рельефа дна дважды обследуется МЛЭ для увеличения плотности точек промера. Избыточность данных съемки МЛЭ обеспечивает возможность построения обоснованной трехмерной цифровой модели рельефа (ЦМР) дна, когда с помощью специальных алгоритмов при камеральной обработке осуществляется устранение эффекта параллакса.
Подробно методика съемки и способы последующей обработки материалов съемки изложены в книге: Фирсов Ю.Г. Основы гидроакустики и использования гидрографических сонаров. - СПб.: Нестор-История, 2010, и в руководящем документе: Правила гидрографической службы №4. Съемка рельефа дна. Часть 2. Методы и требования. МО СССР. ГУНиО. - М., 1984.
Таким образом, существующая методическая база допускает применение МЛЭ для проведения гидрографических работ, однако, в силу естественных причин, не позволяет при одном проходе получить равноточный материал в пределах всей полосы обзора, которую дает многолучевой эхолот. Отсюда остается потенциальная возможность существенно повысить производительность промерных работ, если добиться достоверности данных съемки МЛЭ по всей промерной полосе на одном галсе.
В силу отмеченных обстоятельств, для обеспечения производительной и качественной съемки рельефа дна с помощью многолучевого эхолота практический интерес представляет поиск способа уменьшения методической ошибки, возникающей при рефракции лучей, в условиях, когда вертикальное распределение скорости звука в акватории съемки остается неизвестным.
Известен многолучевой эхолот, выполненный в соответствии с патентом РФ №126146 на полезную модель, который содержит антенну с генератором, приемную систему с системой формирования характеристик направленности, последовательно соединенную с процессором обработки, блок выделения характеристик направленности, блок выбора угла наклона первой характеристики направленности, блок выбора угла наклона второй характеристики направленности, блоки измерения времени прихода сигнала по характеристикам направленности, блок вычисления отношения времен прихода, блок вычисления функции, блок перебора оценок скоростей звука. Это техническое решение позволяет использовать стандартную разработанную аппаратуру многолучевого эхолота и с помощью дополнительной программы определять скорость звука на глубине с достаточной достоверностью, что позволит повысить точность оценки глубины многолучевого эхолота. Однако следует учитывать, что морская среда по своим гидрофизическим характеристикам имеет существенную вертикальную изменчивость в пространстве и во времени. Наличие эффекта рефракции наклонных лучей приводит к появлению параллакса, когда определяемое в результате промеров положение отражающей точки по прямой линии искажается от истинного положения. Этот эффект тем больше, чем шире угловой сектор обзора МЛЭ и больше полоса обзора.
Поэтому недостатком рассматриваемого МЛЭ, взятого нами за прототип, является то, что он не позволяет в полной мере использовать предельные возможности многолучевого эхолота для определения реального профиля дна на одном галсе по всей ширине полосы обзора.
Целью настоящего изобретения является повышение предельной возможности достоверной оценки глубины на одном галсе по всей ширине полосы обзора, которую дает многолучевой эхолот, путем исключения влияния параллакса, возникающего в силу незнания скорости звука по всей глубине океана.
Способ-прототип содержит следующие операции: излучение зондирующего сигнала, прием отраженных сигналов статическим веером вертикальных характеристик направленности, прием сигнала первой характеристикой направленности, измерение угла наклона первой характеристики направленности, измерение времени прихода эхосигнала по первой характеристике направленности, прием эхосигнала по второй характеристике направленности, определение угла наклона характеристики направленности, измерение времени прихода эхосигнала по второй характеристике направленности, вычисление отношения времен принятых эхосигналов двумя характеристиками, измерение скорости звука на глубине приема, вычисление функции и вычисление оценки скорости звука, которая наиболее близка вычисленной функции.
Поэтому недостатком рассматриваемого МЛЭ, взятого нами за прототип, является то, что он не позволяет в полной мере использовать предельные возможности измерения профиля дна по ширине полосы обзора, которую дает многолучевой эхолот.
Целью настоящего изобретения является получение способа определения координат отражающего объекта на дне и рельефа дна на всей полосе обзора многолучевого эхолота в процессе одного промерного галса без необходимости проводить измерение разреза скорости звука по всей рабочей глубине.
Указанный недостаток устраняется тем, что в способ, содержащий излучение зондирующего сигнала, прием эхосигналов статическим веером вертикальных характеристик направленности, измерение скорости звука на глубине приема, введены новые признаки, а именно определяется характеристика направленности, имеющая нулевой угол наклона α0, измеряется время распространения эхосигнала до дна и обратно Тверт, измеряют скорость звука на глубине приема C0, определяют глубину места под килем Hk=0,5С0Тверт, находят среднее значение градиента изменения скорости звука по глубине g из формулы с использованием метода численной итерации
измеряют время распространения эхосигнала по каждому из наклонных лучей Ti накл. с углом наклона αi, определяют глубину Hi для выбранной характеристики направленности с углом αi из формулы методом численной итерации

определяют горизонтальное расстояние от приемника отражающего участка дна для выбранной характеристики направленности по формуле


отображают на графике координаты снятой точки на дне Hi и Di.
Существо изобретения можно пояснить на следующем изложении.
Времена распространения отраженного сигнала по каждому i-му лучу Ti являются функцией таких параметров, как глубина H, углы приемных лучей в вертикальной плоскости αi и зависимость скорости звука от глубины С(H)Ti=F[H,С(H),αi]. В этом уравнении имеются два неизвестных: параметр - глубина H и функция скорости звука от глубины C(H).
В первом представлении задача определения глубины, когда известны параметры сигнала по множеству лучей, но не известно вертикальное распределение скорости звука, относится к не полностью определенным задачам. Это обусловлено, в частности, тем, что вертикальное распределение скорости звука является непрерывной функцией глубины, а многолучевой эхолот производит конечное (равное числу лучей) число измерений временных задержек.
Рассмотрим возможность решения задачи определения глубины, минуя процедуру поиска истинного профиля скорости звука. Для этого допустимо предположить, что наблюдаемое время распространения сигнала по лучу с известным углом приема сигнала и для известной глубины может быть получено не только в существующих гидрофизических условиях. Другими словами, всегда найдется иное, отличное от реального, распределение скорости звука по глубине, которое даст аналогичные параметры принимаемого сигнала при той же глубине места. Допустим, что решение задачи можно найти, формально заменив реальный профиль скорости звука некоторой виртуальной функцией, вид которой задается значением одного какого-то регулирующего параметра ζ. Тогда существует такое значение переменной ζ, при котором для наблюдаемого времени распространения отраженного сигнала по каждому i-му лучу можно записать функцию вида Ti=F[H,Ф(ζ,Н),αi], где Ф(ζ,H) - виртуальная функция вида зависимости скорости звука от глубины Н. В этом уравнении остаются два неизвестных - искомая глубина Н и параметр ζ.
Допустим, что в качестве виртуальной функции Ф(ζ,Н) можно использовать линейную зависимость

где С0 - скорость звука на горизонте наблюдения (горизонте приема-излучения), H - текущая глубина, g - значение градиента скорости звука.
Такая зависимость удобна для решения задачи, т.к. линейное распределение скорости звука задается одним значением градиента скорости звука g. Тогда для решения задачи перейдем к системе уравнений

где T1 и Т2 - времена прихода отраженных от дна сигналов многолучевого эхолота по двум лучам с углами соответственно α1 и α2; Н1 и H2 - глубины места в точках пересечения с поверхностью дна первого и второго лучей, соответственно. Значение скорости звука С0 на горизонте приема-излучения эхолота всегда определяется с помощью специального устройства, устанавливаемого на корпусе судна рядом с антеннами многолучевого эхолота.
Очевидно, что возможность решения системы уравнений (2) потребует приведения ее к виду, где явно будут присутствовать два неизвестных параметра. Для этого следует принять, что одно значение глубины известно. Методически верно будет принять, что глубина места, определяемая вертикальным лучом α0, который не подвержен эффекту рефракции, оценивается с минимальной ошибкой. На это указывают принятые методики, например, Правила гидрографической службы №4. Съемка рельефа дна. Часть 2. Методы и требования. МО СССР. ГУНиО. - М., 1984.
На этом основании далее для рассмотрения принципиальной возможности решения задачи примем, что значение глубины под килем известно Hк.
Для вертикального распределения скорости звука вида (1) при вертикальной локации время распространения сигнала имеет зависимость вида

где Hk=0,5С0Тверт - глубина места под килем.
Время распространения сигнала по наклонному лучу в слое с постоянным градиентом скорости звука можно записать согласно Бреховских Л.М., Лысанова Ю.П. Акустика океана. - В кн.: Физика океана, т.2, М., «Наука», 1978, С.49-145:

где α и  - углы наклона луча (относительно горизонтали) в точке приема и у дна, соответственно.
- углы наклона луча (относительно горизонтали) в точке приема и у дна, соответственно.
Воспользуемся соотношением  а также
а также  согласно закону Снелиуса для углов скольжения. Тогда для времени распространения сигнала по наклонному лучу можно записать
согласно закону Снелиуса для углов скольжения. Тогда для времени распространения сигнала по наклонному лучу можно записать

где CH - скорость звука, которая определяет вертикальную координату точки на дне Hк, от которой отразился луч.
Для решения поставленной задачи из (3) можно найти градиент скорости звука g. После чего из (5) находим глубину отражающей точки, сигнал от которой пришел по лучу с углом прихода αi за время Ti накл. Для расчета значения глубины, используя (1), перепишем (5) в виде

Когда известно значение глубины отражающей точки Hi, определим ее горизонтальную координату Di. Согласно Сташкевич А.П. Акустика моря. Л., «Судостроение» 1966 г. горизонтальное расстояние, пройденное лучом, можно найти из выражения

где CH=C0+gHi, а угол скольжения луча на дне αH можно найти, используя закон Снелиуса [Сташкевич А.П. Акустика моря …]
Таким образом, получаем координаты положения точек на дне по каждому лучу: глубины Hi и горизонтального расстояния Di.
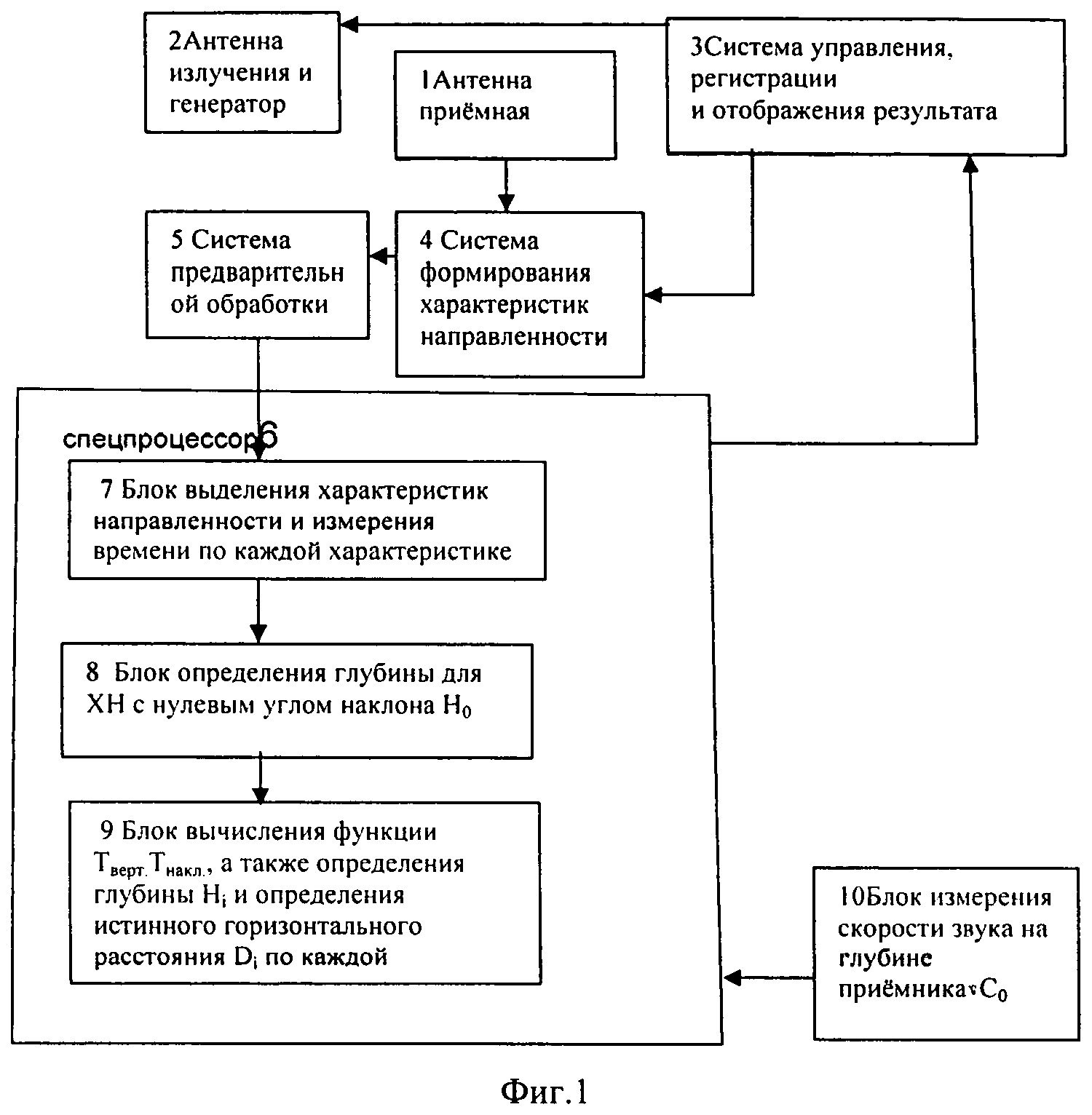
На фиг.1 представлена блок-схема, реализующая предлагаемый способ. Антенна 2 излучения и генератор последовательно соединена с первым выходом системы 3 управления, регистрации и отображения результата, второй выход которой соединен со вторым входом блока 4 системы формирования характеристик направленности. Приемная антенна 1 соединена последовательно с системой 4 формирования характеристики направленности, системой 5 предварительной обработки и спецпроцессором 6, в котором последовательно соединены блок 7 выделения характеристик направленности и измерения времени по каждой характеристике, блок 8 определения глубины для ХН с нулевым углом наклона H0, блок 9 вычисления функции ТвертТнакл, определение глубины по каждой характеристике Hi и определения истинного горизонтального расстояния по каждой характеристике Di. Выход спецпроцессора 6 соединен со входом блока 3 управления, регистрации и отображения, а второй вход спецпроцессора 6 соединен с измерителем скорости звука на глубине приемника.
Схема измерения координат отражающего донного объекта работает следующим образом. Из системы 3 регистрации, управления и отображения результата поступает команда на излучение зондирующего сигнала на антенну 2 излучения и генератор и в блок системы 4 формирования характеристик направленности для обеспечения приема эхосигнала, соответствующего излученному зондирующему сигналу. Приемной антенной 1 принимаются эхосигналы по всей апертуре антенны, и через систему 4 формирования характеристик направленности передаются в систему 5, где производится оптимальная обработка принятых эхосигналов в статическом веере характеристик направленности системы. Система 5 предварительной обработки работает в своем стационарном режиме и одновременно с блоком 6 спецпроцессором. Эти системы являются стандартными гидролокаторов. Достаточно подробно принципы работы гидролокаторов рассмотрены в отечественной литературе, А.В. Богородский, Д.Б. Островский. Гидроакустические навигационные и поисково-обследовательские средства, СПб, 2009 г., Изд. ЛЭТИ, с.116-122, а также Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника», СПб., «Наука», 2004 г., с.320-327. Спецпроцессоры также являются известными устройствами, которые работают по разработанным программам и жесткой логике управления при поступлении исходной информации.(Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника», СПб., «Наука», 2004 г., с.281-289).
Для определения параметров координат донного отражателя используется оценка скорости звука, измеренная на глубине погружения приемной антенны. Измерение скорости звука производится в блоке 10 измерения скорости звука на глубине приемника С0. Измеритель скорости звука является известным устройством, который выпускается серийно и широко известен в литературе. (В.А. Комляков «Корабельные средства измерения скорости звука и моделирования акустических полей в океане», СПб., «Наука», 2003 г., стр.50-87).
В блоке 7 по каждой характеристике направленности определяется время прихода эхосигнала от дна. По выбранной характеристике в блоке 8 определяется угол наклона, его значение, время распространения и глубина для характеристики направленности с нулевым углом наклона и передаются в блок 9 вычисления функций. Блок 9 предназначен для вычисления функции ТвертТнакл и определения глубины по каждой характеристике Hi и определения истинного горизонтального расстояния по каждой характеристике Di. Вычисление функций производится по программам, содержащим известные стандартные процедуры с использованием последовательных численных итераций, которые обеспечивают минимальную ошибку между измеренной величиной и результатами вычислений. Все вычислительные операции производятся в спецпроцессоре 3 с использованием стандартных процедур и разработанного программного обеспечения и могут быть выполнены в тех же спецпроцессорах, на которых реализуется работа любого гидролокатора. Вычисленные оценки координаты Н и D, принадлежащие донному отражателю, передаются в блок 3 для отображения на индикаторе и вывода результата.
Таким образом, практическое внедрение предлагаемого способа определения координат донного отражателя позволяет исключить влияние рефракции лучей, может дать значительный выигрыш по времени. При этом значение методической ошибки может быть снижено существенно за счет отсутствия необходимости измерять разрез скорости звука по всей рабочей глубине.
Способ измерения координат дна многолучевого эхолота, содержащий излучение зондирующего сигнала, прием эхосигналов статическим веером вертикальных характеристик направленности с различными углами наклона, измерение скорости звука на глубине приема, отличающийся тем, что определяют вертикальную характеристику направленности, имеющую нулевой угол наклона α, для нее измеряют время распространения эхосигнала до дна и обратно Т, измеряют скорость звука на глубине приема С, определяют глубину места под килем H=0,5СТ, находят среднее значение градиента изменения скорости звука по глубине g из формулы с использованием метода численной итерации, измеряют время распространения эхосигнала по каждому из наклонных лучей T с углом наклона α, определяют глубину H для выбранной характеристики направленности с углом α из формулы методом численной итерации, определяют горизонтальное расстояние от приемника до отражающего участка дна для выбранной характеристики направленности по формуле отображают на графике координаты снятой точки на дне H и D.



Устройство для отбивания и размягчения мяса
Способ определения скорости звука
Способ создания условий для жизнедеятельности человека в специальном гермообъекте вмф
Способ лечения нейросенсорной тугоухости
Способ измерения глубины объекта и гидролокатором
Способ выполнения водолазных работ с использованием декомпрессии на поверхности
Способ адаптивной обработки сигнала шумоизлучения
Способ измерения скорости звука
Способ цветового кодирования информации гидроакустического шумопеленгования
Способ определения маневра шумящего объекта
Устройство для отбивания и размягчения мяса
Способ определения скорости звука
Способ создания условий для жизнедеятельности человека в специальном гермообъекте вмф
Способ лечения нейросенсорной тугоухости
Способ измерения глубины объекта и гидролокатором
Способ выполнения водолазных работ с использованием декомпрессии на поверхности
Способ адаптивной обработки сигнала шумоизлучения
Способ измерения скорости звука
Способ цветового кодирования информации гидроакустического шумопеленгования
Способ определения маневра шумящего объекта

