Результат интеллектуальной деятельности: МОБИЛЬНЫЙ РОБОТ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к робототехнике и может найти применение в качестве мобильного робота и самодвижущейся транспортной тележки для использования в цехах промышленных предприятий с высокими градиентами окружающей температуры.
Одной из важнейших задач, решаемых роботами, является доставка грузов с высокой точностью в заданные зоны цехов и обратно из этих зон.
Главными возмущающими воздействиями на робот являются высокие колебания окружающей температуры, которые неизбежно снижают точность доставки грузов. Поэтому усилия разработчиков роботов сосредоточены на уменьшении именно зависимости точности перемещения робота от изменения окружающей температуры.
Уровень техники
Рассмотрим аналоги предлагаемого изобретения
Библиографические данные аналогов изобретения
Известен из уровня техники мобильный робот (патент RU №2130618 МПК G01R 33/00, опубл. 20.05.1999), содержащий платформу со смонтированными на ней колесами, датчики параметров движения и бортовую вычислительную сеть.
Недостатком является то, что данный мобильный робот (МР) обладает низкой точностью перемещения в цехах промышленных предприятий с высокими градиентами окружающей температуры.
Наиболее близким к предлагаемому изобретению является МР (патент RU №2446937 МПК B25J 5/00, опубл. 10.04.2012), содержащий платформу, три колеса, три колесных вала со смонтированными на них колесами, колесную вилку третьего колеса, два электродвигателя, датчики параметров движения, источник питания и три контроллера.
В мобильном роботе по патенту RU №2446937 общими признаками с предлагаемым изобретением являются платформа, три колеса, три колесных вала со смонтированными на них колесами, колесная вилка третьего колеса, два двигателя, источник питания и контроллер, при этом оси колесных валов первого и второго колес лежат на одной прямой.
Недостатком этого робота является низкая точность перемещения из-за градиентов внешней температуры, при этом основными источниками погрешностей являются двухступенчатые редукторы и датчики угла поворота обоих колес.
Раскрытие изобретения
Техническим результатом предлагаемого изобретения является повышение точности перемещения робота за счет формирования системы передачи движения к колесам, не критичной к градиентам температуры.
Технический результат достигается совокупностью существенных признаков - введением в МР двух электромагнитов, двух упругих дисков, упорного механизма, рамки, двух упоров колесной вилки третьего колеса, четырех усилителей, шести резисторов и связей введенных элементов между собой и с элементами прототипа.
Сущность изобретения заключается в создании механического эталона перемещения и однозначного соответствия движения робота этому эталону. Поскольку размеры механического эталона стабилизированы в условиях градиентов температуры, а перемещение робота точно соответствует размерам эталона, то этим и достигается повышение точности движения робота в условиях изменяющихся окружающих температур.
Заявляемое изобретение направлено на решение следующих двух задач:
- создание механического эталона, общего для линейного и углового перемещения робота;
- стабилизация этого эталона при изменениях температуры, окружающей робот.
Существенные признаки, характеризующие предлагаемое изобретение и общие с прототипом: платформа, три колеса, три колесных вала со смонтированными на них колесами, колесная вилка третьего колеса, установленные на платформе два электродвигателя, источник питания и контроллер, при этом оси колесных валов первого и второго колес лежат на одной прямой.
Существенные признаки, характеризующие предлагаемое изобретение и отличающиеся от прототипа: дополнительно введены два электромагнита, два упругих диска, упорный механизм, рамка, два упора колесной вилки третьего колеса, шесть резисторов, четыре усилителя, причем первый и второй колесные валы кинематически связаны с рамкой, кинематически связанной с платформой осью, ортогональной осям колесных валов первого и второго колес и являющейся осью первого электродвигателя, второй электродвигатель установлен по оси колесной вилки третьего колеса, ортогональной оси колесного вала третьего колеса, два упора колесной вилки третьего колеса установлены на платформе и кинематически связаны с колесной вилкой третьего колеса, на колесных валах первого и второго колес укреплены первый и второй упругие диски соответственно, в рамке установлены первый и второй электромагниты, кинематически связанные с первым и вторым упругими дисками соответственно, упорный механизм укреплен на платформе и кинематически связан с рамкой, выход источника питания подключен к рамке, колесной вилке третьего колеса и к упругим дискам, упоры упорного механизма, упоры колесной вилки третьего колеса и сердечники первого и второго электромагнитов соединены с соответствующими входами контроллера и соответствующими резисторами, выходы контроллера через соответствующие усилители подключены к обмоткам первого и второго электродвигателей, первого и второго электромагнитов соответственно. Кроме того, упорный механизм выполнен монолитным, содержит два встречно направленных металлических упора и диэлектрическую прокладку между ними, причем рамка и упоры упорного механизма выполнены из одного металла, имеющего коэффициент линейного расширения меньше или равный 8·10-6 1/°С.
Для решения первой задачи - создания механического эталона, общего для линейного и углового перемещения робота, в него введены два электромагнита, два упругих диска, упорный механизм, рамка, два упора колесной вилки третьего колеса, шесть резисторов, четыре усилителя, при этом для реализации линейного движения робота первый и второй электромагниты используются в режиме поочередного торможения первого и второго колес соответственно с одновременными угловыми колебаниями рамки относительно платформы. Для реализации углового движения робота используется режим одновременного торможения первого и второго колес с последующим угловым отклонением рамки относительно платформы. В результате линейное и угловое перемещения робота точно соответствуют одному и тому же механическому эталону - угловому перемещению рамки относительно платформы.
Для решения второй задачи - стабилизации этого эталона при изменениях температуры, окружающей робот, упорный механизм выполнен монолитным, содержит два встречно направленных металлических упора и диэлектрическую прокладку между ними, причем рамка и упоры упорного механизма выполнены из одного металла, имеющего коэффициент линейного расширения меньше или равный 8·10-6 1/°С. В результате угол поворота рамки не зависит от градиентов температуры, окружающей робот, и соответственно этому стабилизированному эталону устраняется погрешность углового перемещения и снижается погрешность линейного перемещения робота при изменениях окружающей температуры.
Решение двух вышеуказанных задач обеспечивает повышение точности перемещения робота в цехах промышленных предприятий с высокими градиентами окружающей температуры.
Обоснование существенности отличительных признаков
Сущность изобретения поясняется чертежами фиг.1-7.
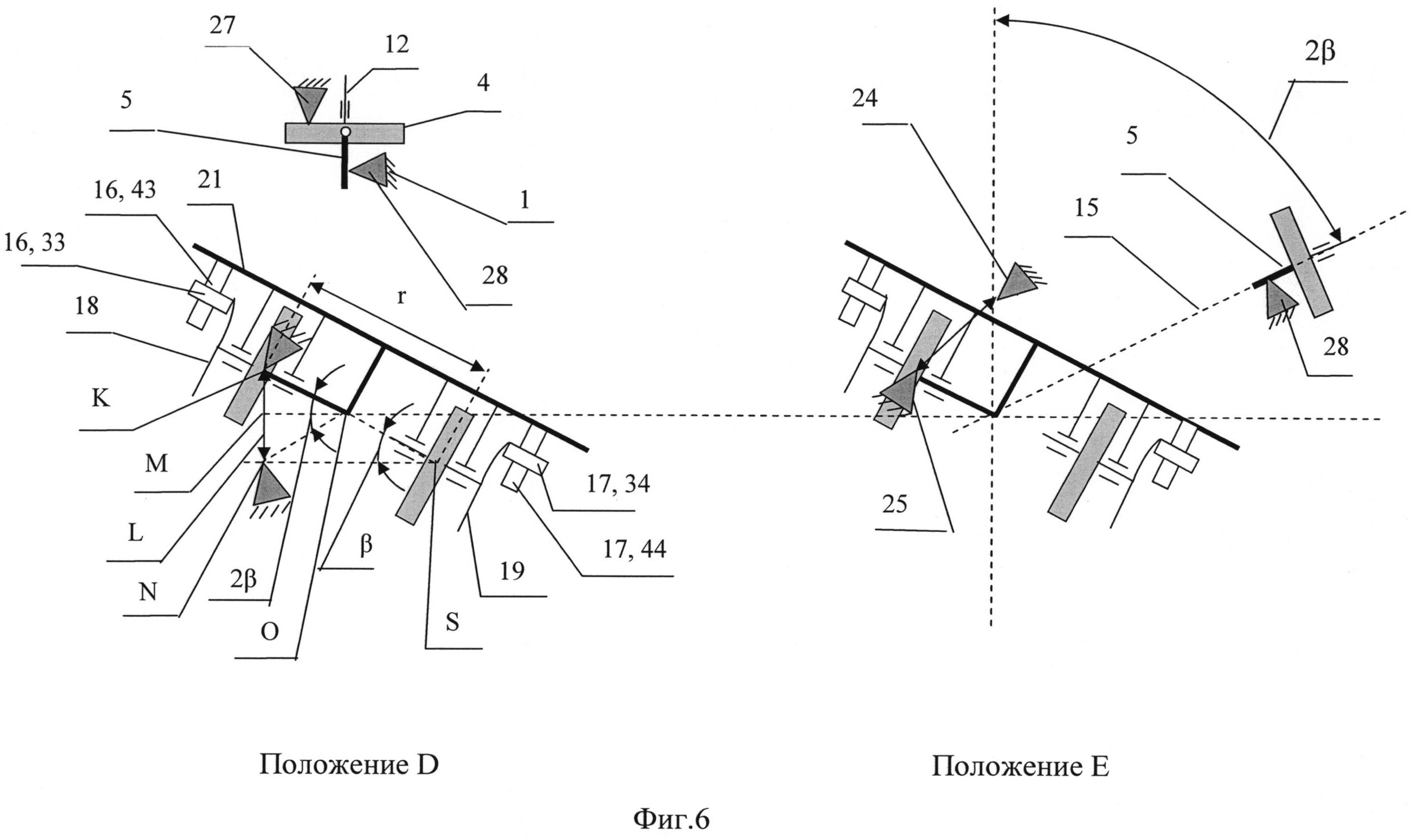
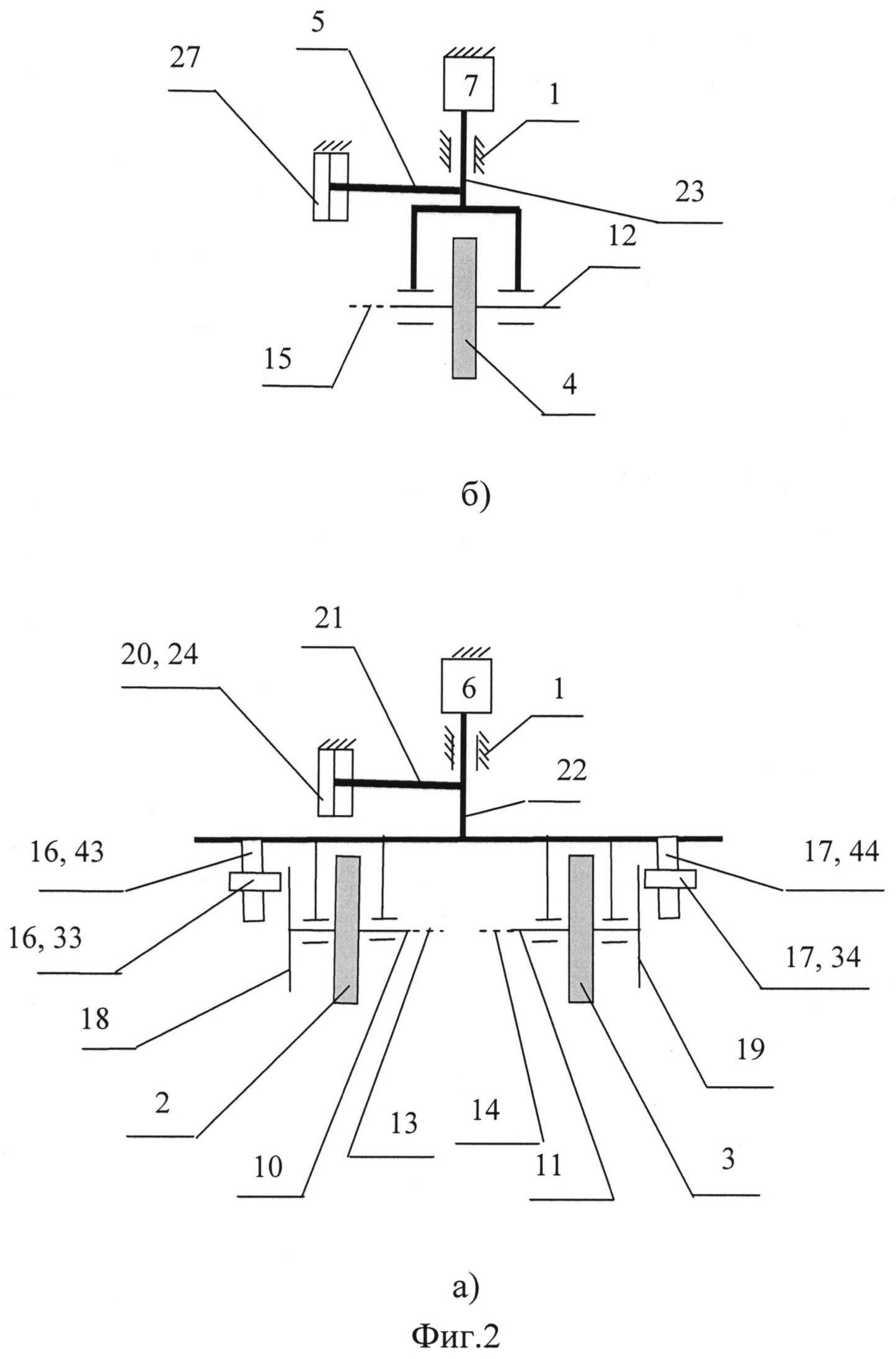
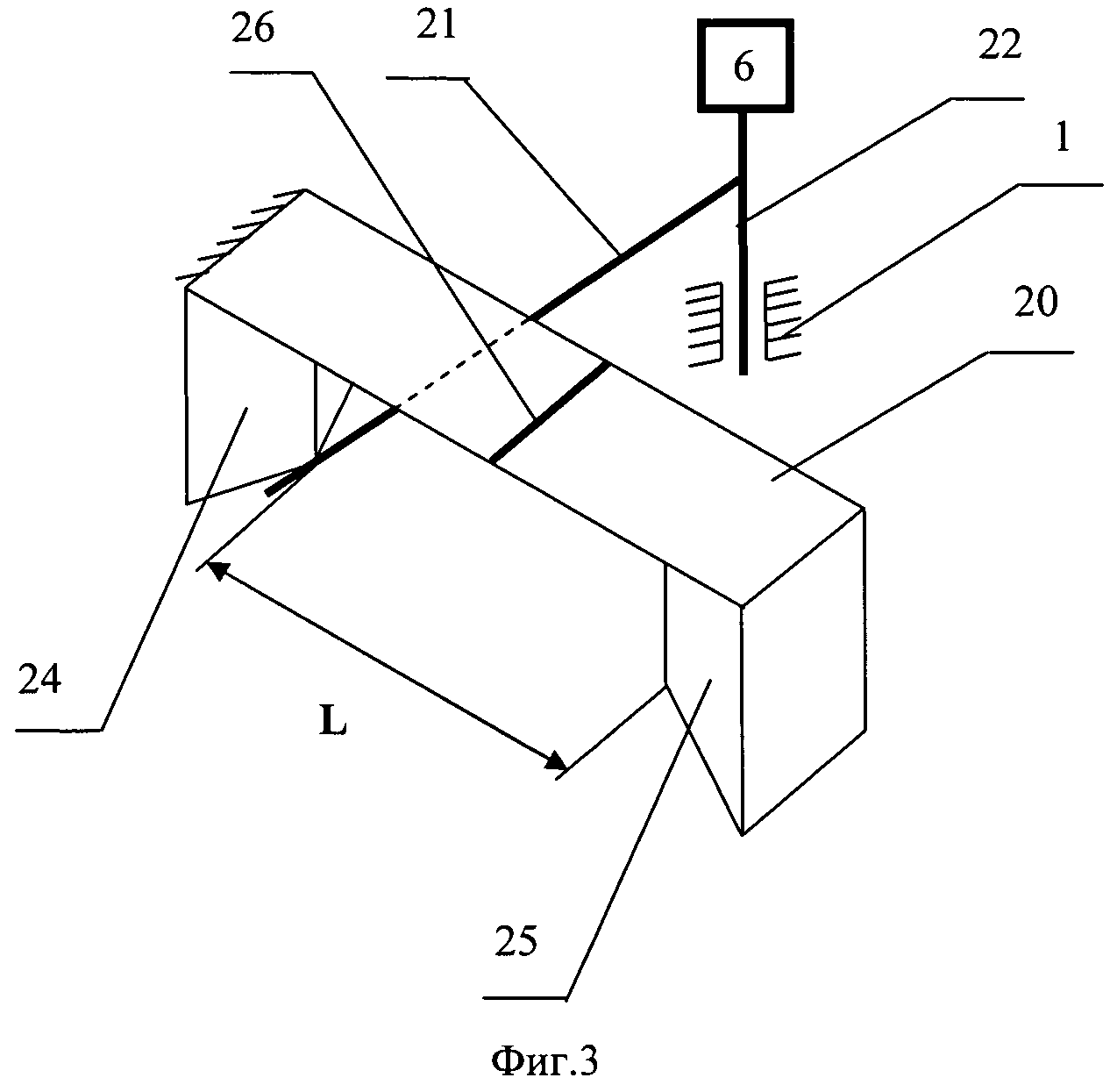
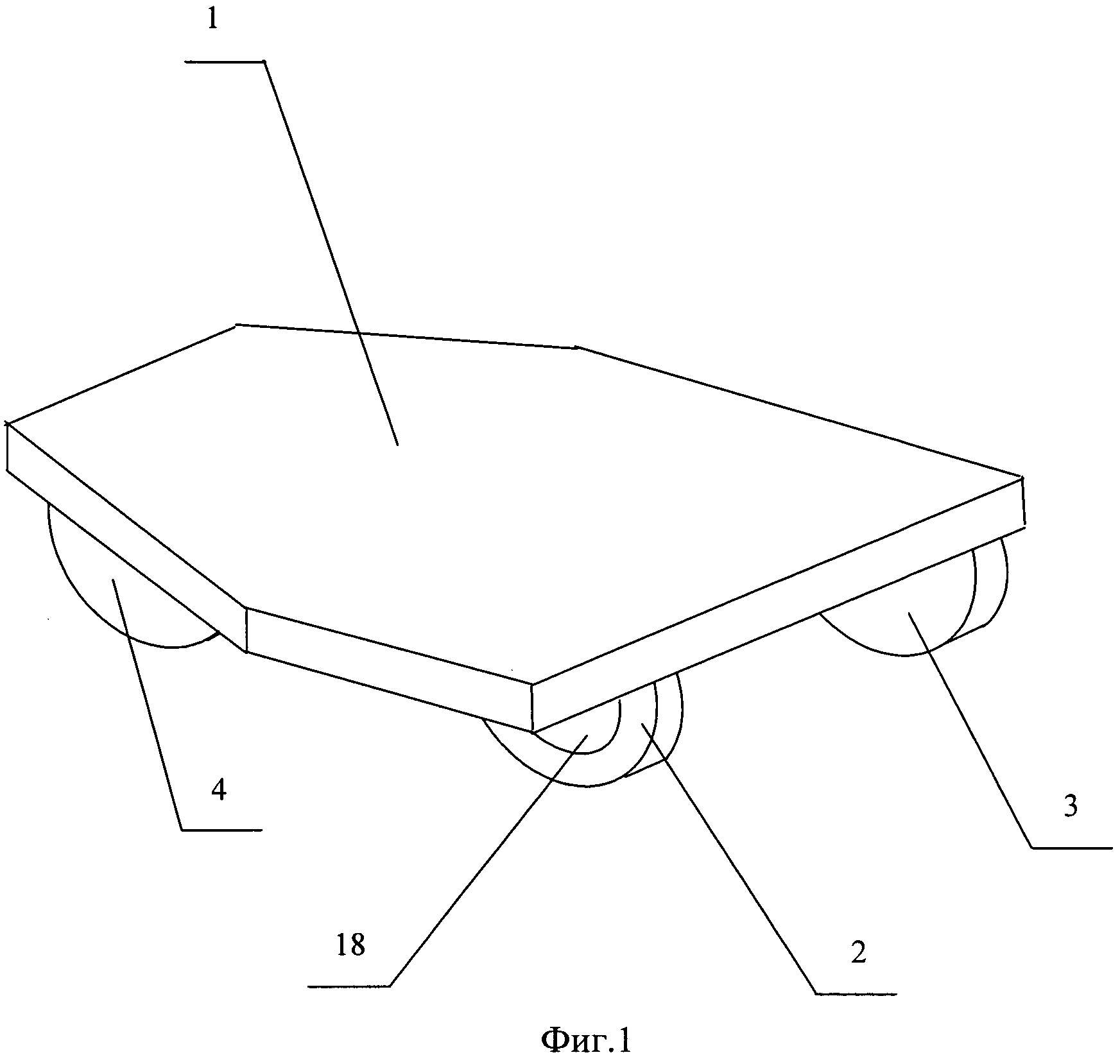
На фиг.1 изображен внешний вид мобильного робота. Кинематическая схема рамки с первым и вторым колесами мобильного робота приведена на фиг.2,а; кинематическая схема колесной вилки с третьим колесом мобильного робота - на фиг.2,б. На фиг.3 приведена схема упорного механизма; на фиг.4 - функциональная схема МР. Линейное движение робота поясняется принципиальными схемами положений А, В, С (вид сверху) на фиг.5. Угловое движение робота поясняется принципиальными схемами (вид сверху) положений D, Е на фиг.6 и положений F, G на фиг.7.
На фиг.1-7 цифрами обозначены: 1 - платформа; 2, 3, 4 - первое, второе и третье колесо соответственно; 5 - колесная вилка третьего колеса; 6 и 7 - первый и второй электродвигатели соответственно; 8 - источник питания; 9 - контроллер; 10, 11, 12 - колесные валы первого, второго и третьего колеса соответственно; 13, 14, 15 - оси колесных валов первого, второго и третьего колеса соответственно; 16, 17 - первый и второй электромагниты соответственно; 18, 19 - первый и второй упругие диски соответственно; 20 - упорный механизм; 21 - рамка; 22 - ось рамки; 23 - ось колесной вилки третьего колеса; 24, 25 - первый и второй упоры упорного механизма соответственно; 26 - диэлектрическая прокладка упорного механизма; 27, 28 - первый и второй упоры колесной вилки третьего колеса соответственно; 29, 30, 31, 32 - первый, второй, третий и четвертый усилители соответственно; 33, 34 - сердечники первого и второго электромагнитов соответственно; 35, 36, 37, 38, 39, 40 - первый, второй, третий, четвертый, пятый и шестой резисторы соответственно; 41, 42 - обмотки первого и второго электродвигателей соответственно; 43, 44 - обмотки первого и второго электромагнитов соответственно.
Осуществление изобретения
Как и в прототипе, предлагаемый МР содержит платформу 1, три колеса 2, 3, 4, установленные на платформе колесную вилку 5 третьего колеса 4, два электродвигателя 6 и 7, источник питания 8, контроллер 9, при этом оси 13 и 14 колесных валов 10 и 11 первого 2 и второго 3 колес лежат на одной прямой.
В отличие от прототипа предлагаемый МР содержит дополнительно два электромагнита 16 и 17, два упругих диска 18 и 19, упорный механизм 20, рамку 21, два упора 27 и 28 колесной вилки третьего колеса соответственно, четыре усилителя 29-32, шесть резисторов 35-40, причем колесные валы 10 и 11 кинематически связаны с рамкой 21, кинематически связанной с платформой 1 осью поворота 22, ортогональной осям 13 и 14 колесных валов 10 и 11 первого 2 и второго 3 колес и являющейся осью первого электродвигателя 6, второй электродвигатель 7 установлен по оси 23, ортогональной оси 15 колесного вала 12 третьего колеса 4, два упора 27 и 28 колесной вилки третьего колеса установлены на платформе 1 и кинематически связаны с колесной вилкой 5 третьего колеса 4, на колесных валах 10 и 11 первого 2 и второго 3 колес укреплены первый и второй упругие металлические диски 18 и 19 соответственно, в рамке 21 установлены первый и второй электромагниты 16 и 17, кинематически связанные с первым 18 и вторым 19 упругими дисками соответственно, на платформе 1 укреплен упорный механизм 20, кинематически связанный с рамкой 21, выход источника питания 8 подключен к рамке 21, колесной вилке 5 третьего колеса 4 и к упругим дискам 18 и 19 соответственно, первый 24 и второй 25 упоры упорного механизма, первый 27 и второй 28 упоры колесной вилки третьего колеса и сердечники 33 и 34 первого 16 и второго 17 электромагнитов соединены с соответствующими входами контроллера 9 и соответствующими резисторами 35 - 40, а выходы контроллера 9 через соответствующие усилители 29 - 32 подключены к обмоткам 41 и 42 первого 2 и второго 3 электродвигателей, к обмоткам 43 и 44 первого 16 и второго 17 электромагнитов соответственно. Кроме того, упорный механизм выполнен монолитным, содержит два встречно направленных металлических упора 24 и 25 и диэлектрическую прокладку 26 между ними, причем рамка 21 и упоры 24 и 25 упорного механизма 20 выполнены из одного металла, имеющего коэффициент линейного расширения меньше или равный 8-106 1/°С.
Линейное движение МР осуществляют циклами следующим образом.
Постоянный ток с первого выхода контроллера 9 (фиг.4) через усилитель 29 поступает в обмотку 41 первого электродвигателя 6, который, прикладывая момент сил к рамке 21, поворачивает рамку 21 до упора 24. При этом замыкается контактная группа «рамка 21 - первый упор 24 упорного механизма (УМ)» и постоянный ток с выхода источника питания (ИП) через замкнутую контактную группу поступает на резистор 35 (фиг.4). Падение напряжения на резисторе 35, представляя собой единичный логический сигнал, поступает на первый вход контроллера, сигнализируя, что рамка находится в исходном положении.
Аналогично постоянный ток с второго выхода контроллера 9 через усилитель 30 поступает в обмотку 42 второго электродвигателя 7, который, прикладывая момент сил к колесной вилке 5 третьего колеса 4, поворачивает колесную вилку 5 до упора 27. При этом замыкается контактная группа «вилка 5 - упор 27» и постоянный ток с выхода ИП через замкнутую контактную группу поступает на резистор 37. Падение напряжения на резисторе 37, представляя собой единичный логический сигнал, поступает на третий вход контроллера (фиг.4), сигнализируя, что вилка 5 находится в исходном положении.
В этом положении в связи с отсутствием сигналов с третьего и четвертого выходов контроллера 9 через соответствующие усилители 31 и 32 в обмотки 43 и 44 электромагнитов 16 и 17 соответственно, контактные группы «диск 18 - сердечник 33» и «диск 19 - сердечник 34» разомкнуты и соответственно на пятом и шестом входах контроллера 9 (фиг.4) присутствуют нулевые сигналы.
В результате МР устанавливают в исходное положение А (фиг.5).
Линейное движение робота осуществляют переводом МР из положения А в положение В. Для этого постоянный ток с четвертого выхода контроллера (фиг.4) через усилитель 32 поступает в обмотку 44 электромагнита 17, при этом упругий диск 19 притягивается к сердечнику 34 до касания, тем самым обеспечивая торможение второго колеса 7 и замыкание контактной группы «диск 19 - сердечник 34». Постоянный ток с выхода ИП через замкнутую контактную группу поступает на резистор 40. Падение напряжения на резисторе 40 поступает на шестой вход контроллера, сигнализируя, что второе колесо находится в заторможенном состоянии.
После получения контроллером сигнала о торможении второго колеса постоянный ток противоположной полярности с первого выхода контроллера 9 (фиг.4) через усилитель 29 поступает в обмотку 41 первого электродвигателя 6, который, прикладывая момент сил противоположной полярности к рамке 21, поворачивает рамку 21 до упора 25. При этом замыкается контактная группа «рамка 21 - упор 25» (размыкается контактная группа «рамка 21 - упор 24) и постоянный ток с выхода ИП через эту замкнутую контактную группу поступает на резистор 36 (фиг.4). Падение напряжения на резисторе 36, представляя собой единичный логический сигнал, поступает на второй вход контроллера, сигнализируя, что робот находится в положении В. Результатом является перемещение МР на расстояние L, где L - расстояние между упорами 24 и 25 (фиг.5).
В процессе всего времени линейного движения вилка 5 удерживается двигателем 7 в исходном положении (на упоре 27), соответственно на третьем входе контроллера присутствует единичный логический сигнал.
После получения сигнала о нахождении робота в положении В контроллер формирует сигналы перевода МР из положения В в положение С (сигналы торможения первого колеса и одновременно растормаживания второго колеса), при этом постоянный ток с третьего выхода контроллера (фиг.4) через усилитель 31 поступает в обмотку 43 электромагнита 16 и одновременно прекращается подача постоянного тока с четвертого выхода контроллера 9 через усилитель 32 в обмотку 44 электромагнита 17.
В результате:
- упругий диск 18 притягивается к сердечнику 33 до касания, тем самым обеспечивая торможение первого колеса 6 и замыкание контактной группы «диск 18 - сердечник 33». Постоянный ток с выхода ИП через замкнутую контактную группу поступает на резистор 39 (фиг.4). Падение напряжения на резисторе 39 поступает на пятый вход контроллера, сигнализируя, что первое колесо 2 находится в заторможенном состоянии;
- обесточивание электромагнита 17 приводит к размыканию контактной группы «диск 19 - сердечник 34», а обнуление падения напряжения на резисторе 40 (фиг.4), поступающего на шестой вход контроллера 9, сигнализирует, что второе колесо 3 находится в расторможенном состоянии.
После получения контроллером сигнала о заторможенном состоянии первого колеса 2 и расторможенном состоянии второго колеса 3 постоянный ток с первого выхода контроллера 9 (фиг.4) через усилитель 29 поступает в обмотку 41 первого электродвигателя 6, который, прикладывая момент сил к рамке 21, поворачивает рамку 21 до упора 24. При этом замыкается контактная группа «рамка 21 - упор 24» и постоянный ток с выхода ИП через замкнутую контактную группу поступает на резистор 35 (фиг.4). Падение напряжения на резисторе 35, представляя собой единичный логический сигнал, поступает на первый вход контроллера, сигнализируя, что рамка находится в положении С. В этом положении линейное перемещение робота составляет 2L (фиг.5). Цикл линейного движения закончен. Далее возможно повторение цикла линейного движения или угловое движение (в положение Д).
Угловое движение МР осуществляется циклами следующим образом (фиг.6 и 7).
Постоянный ток с четвертого выхода контроллера 9 (фиг.4) поступает через усилитель 32 в обмотку 44 электромагнита 17, при этом упругий диск 19 притягивается к сердечнику 34 до касания (фиг.6), тем самым обеспечивая торможение второго колеса 7 и замыкание контактной группы «диск 19 - сердечник 34». Постоянный ток с выхода ИП через замкнутую контактную группу поступает на резистор 40. Падение напряжения на резисторе 40 (фиг.4) поступает на шестой вход контроллера, сигнализируя, что второе колесо находится в заторможенном состоянии. Таким образом, заторможенное состояние обеспечено у обоих колес 2 и 3.
После получения сигналов о торможении колес 2 и 3 контроллер 9 формирует постоянный ток противоположной полярности, поступающий с второго выхода контроллера 9 (фиг.4) через усилитель 30 в обмотку 42 электродвигателя 7, который, прикладывая момент сил противоположной полярности к вилке 5, поворачивает вилку на 90° до упора 28. При этом замыкается контактная группа «колесная вилка 5 - упор 28» и постоянный ток с выхода ИП через замкнутую контактную группу поступает на резистор 38 (фиг.4). Падение напряжения на резисторе 38, представляя собой единичный логический сигнал, поступает на четвертый вход контроллера, сигнализируя, что робот находится в положении Д для углового движения.
После получения контроллером сигналов торможения обоих колес и положения колесной вилки 5 на упоре 28 постоянный ток противоположной полярности с первого выхода контроллера 9 (фиг.4) через усилитель 29 поступает в обмотку 41 первого электродвигателя 6, который, прикладывая момент сил к платформе 1, поворачивает платформу до положения, при котором рамка касается упора 25. При этом замыкается контактная группа «рамка 21 - упор 25» и постоянный ток с выхода ИП через замкнутую контактную группу поступает на резистор 36 (фиг.4). Падение напряжения на резисторе 36, представляя собой единичный логический сигнал, поступает на второй вход контроллера, сигнализируя, что рамка находится в положении Е (фиг.6).
При заторможенном положении колес 2 и 3 постоянный ток с второго выхода контроллера 9 (фиг.4) поступает через усилитель 30 в обмотку электродвигателя 42, который, прикладывая момент сил к вилке 5 третьего колеса 4, поворачивает вилку 5 до упора 27, устанавливая МР в положение F (фиг.7). Об этом сообщает единичный логический сигнал, пришедший на третий вход контроллера. После получения сигнала о положении вилки на упоре 27 постоянный ток противоположной полярности с первого выхода контроллера 9 (фиг.4) через усилитель 29 поступает в обмотку первого электродвигателя 6, который, прикладывая момент сил к рамке 21, поворачивает рамку до упора 24. Затем контроллер 9 обесточивает электромагниты 16 и 17, переводя МР в положение G (фиг.7). В этом положении угловое перемещение платформы 1 составляет 2β=2arcsm(L/r), где r - расстояние между центрами первого 2 и второго 3 колес. Цикл углового перемещения робота закончен. Далее возможно продолжение движения МР в линейном (положения G, В, С) или угловом (положения G, D, Е, F) направлениях.
Для реализации предлагаемого МР может быть использован контроллер AT32UC3C2512C - A2UR. Для реализации резисторов могут быть использованы резисторы С2-29В. Для изготовления рамки и металлических упоров упорного механизма может быть использован сплав 45НХТ, имеющий температурный коэффициент линейного расширения 7·10-6 1/°С, в качестве диэлектрической прокладки может быть использована керамика ВК94-1, имеющая температурный коэффициент линейного расширения 3,86·10-6 1/°С.
Поскольку толщина прокладки пренебрежимо мала по сравнению с размером L между упорами упорного механизма, температурную нестабильность размера L можно оценить величиной 7·106 1/°С.
Перейдем к оценке эффективности изобретения
В роботе-прототипе (по патенту RU №2446937) для управления движением применен датчик угла (ДУ) поворота и двухступенчатый (с цилиндрической и конической зубчатыми передачами) редуктор каждого из двух колес.
Рассмотрим погрешности перемещения одного колеса, которые обуславливают неточность углового перемещения робота-прототипа.
В качестве ДУ наибольшее применение находит потенциометрический датчик. Температурная погрешность перемещения колеса из-за температурной погрешности потенциометрического ДУ составляет ориентировочно 2·10-4 1/°С. Эта погрешность обусловлена, в основном, температурной нестабильностью источника питания потенциометрического ДУ.
Температурная погрешность перемещения колеса, обусловленная несовершенством цилиндрической ступени редуктора, составляет примерно 1·10-4 1/°С. Эта погрешность возникает из-за необходимости иметь гарантированный зазор в зубчатой передаче, чтобы предотвратить заклинивание при градиентах окружающей температуры.
По аналогичной причине температурная погрешность перемещения колеса, обусловленная несовершенством конической ступени редуктора, составляет ориентировочно 1·10-4 1/°С.
Учитывая, что вышеуказанные составляющие погрешности случайны и взаимно независимы, температурную погрешность перемещения одного колеса робота-прототипа (температурную погрешность углового перемещения МР) можно оценить величиной:
[{22+12+12)1/2}·10-4 =2,45·10-4 1/°С.
Рассмотрим температурную погрешность линейного перемещения робота-прототипа. Теперь необходимо учесть погрешности обоих (первого и второго) колес. Полагая, что эти погрешности случайны и взаимно независимы, температурную погрешность линейного перемещения робота-прототипа можно оценить величиной:
[(2,452+2,452)1/2]·10-4=3,46·10-4 1/°С.
Следует отметить, что вследствие различия случайных погрешностей перемещения первого и второго колес линейное движение робота-прототипа приводит к появлению сопутствующего нежелательного углового движения, что дополнительно повышает уровень температурных погрешностей этого МР.
В предлагаемом изобретении вышеуказанные источники погрешностей (ДУ, редукторы) устранены путем введения двух электромагнитов, двух упругих дисков, упорного механизма, рамки, двух упоров колесной вилки третьего колеса, шести резисторов, четырех усилителей, причем первый и второй колесные валы кинематически связаны с рамкой, кинематически связанной с платформой осью поворота, ортогональной осям колесных валов первого и второго колес и являющейся осью первого электродвигателя, второй электродвигатель установлен по оси колесной вилки третьего колеса, ортогональной оси колесного вала третьего колеса, два упора колесной вилки третьего колеса установлены на платформе и кинематически связаны с колесной вилкой третьего колеса, на колесных валах первого и второго колес укреплены первый и второй упругие диски соответственно, в рамке установлены первый и второй электромагниты, кинематически связанные с первым и вторым упругими дисками соответственно, упорный механизм укреплен на платформе и кинематически связан с рамкой, выход источника питания подключен к рамке, колесной вилке третьего колеса и к упругим дискам, упоры упорного механизма, упоры колесной вилки третьего колеса и сердечники первого и второго электромагнитов соединены с соответствующими входами контроллера и соответствующими резисторами, выходы контроллера через соответствующие усилители подключены к обмоткам первого и второго электродвигателей, первого и второго электромагнитов соответственно.
Кроме того, упорный механизм выполнен монолитным, содержит два встречно направленных металлических упора и диэлектрическую прокладку между ними, причем рамка и упоры упорного механизма выполнены из одного металла, имеющего коэффициент линейного расширения меньше или равный 8·10-6 1/°С.
Рассмотрим температурную погрешность углового движения предлагаемого МР.
Из треугольника KSN на фиг.6 (положение D) следует, что угол поворота МР:

где L=L0(1+αΔТ); r=r0(1+αΔТ); r0, L0 - исходные величины размеров r, L;
α - температурный коэффициент линейного расширения материала рамки и упоров упорного механизма;
ΔТ - изменение (градиент) окружающей температуры.
Из формулы (1) следует, что вследствие выполнения рамки и упоров упорного механизма из одного металла (с одинаковым температурным коэффициентом линейного расширения α) угловой поворот платформы на угол  не зависит от градиентов температуры, так как эта формула не содержит ΔТ. В результате температурная погрешность углового движения предлагаемого МР отсутствует.
не зависит от градиентов температуры, так как эта формула не содержит ΔТ. В результате температурная погрешность углового движения предлагаемого МР отсутствует.
Рассмотрим температурную погрешность линейного движения предлагаемого МР.
В отличие от робота-прототипа в предлагаемом МР отсутствуют датчики угла и редукторы, поэтому температурная нестабильность линейного движения предлагаемого МР определяется только нестабильностью расстояния L между упорами 24 и 25 (нестабильностью механического эталона) и не зависит от температурных колебаний напряжения ИП, поскольку завершение движения осуществляется в момент касания рамки упора 24 (или 25), то есть в момент подачи логической единицы на первый (или второй) вход контроллера.
Температурная погрешность размера L упорного механизма не превышает 8·10-6 1/°С, а перемещение предлагаемого робота точно соответствует размеру L, поэтому температурная погрешность линейного перемещения предлагаемого МР составляет не более 8·10-6 1/°С.
Таким образом, в отличие от робота-прототипа:
- при наличии градиентов окружающей температуры температурная погрешность углового движения предлагаемого МР отсутствует, а точность линейного перемещения предлагаемого МР повышается в 3,46·10-4/8·10-6=43 раза.
- линейное движение предлагаемого МР не сопровождается появлением углового движения (отсутствует перекрестная связь между линейным и угловым движениями робота), поскольку оба колеса (первое и второе) при линейном движении проходят одинаковый путь, определяемый одним и тем же расстоянием L механического эталона.
В этой совокупности преимуществ заключается эффективность изобретения.
Раздаточная коробка транспортного средства с механизмом переключения передач
Способ производства обогащенного печенья с добавлением овсяной муки
Способ получения труб с внутренним винтообразным оребрением и устройство для его осуществления
Торт "графские развалины"
Способ увеличения срока годности мучных кондитерских изделий (варианты)
Призматическая осадительная камера графитовой пыли (варианты)
Творог с антиоксидантными свойствами
Способ определения параметров движения самолета при его посадке
Способ выплавки рельсовой стали в кислородном конвертере
Мартенситная коррозионно-стойкая хромсодержащая сталь с улучшенной обрабатываемостью резанием
Система управления группой электроприводов с параллельными каналами регулирования
Система зажигания для двс с увеличенной энергией разряда
Способ прессования электротехнических изделий из порошковых композиций на основе углерода
Способ производства экструдированных кукурузных хлопьев
Способ определения жесткости технологической системы круглошлифовального станка с чпу
Универсальный коронный электросепаратор
Способ аэрации водоема в период ледостава
Легкообрабатываемая конструкционная хромоникелевая сталь
Способ интегрирующего аналого-цифрового преобразования
Рубленые полуфабрикаты из мяса птицы

