Результат интеллектуальной деятельности: СПОСОБ ОБНАРУЖЕНИЯ МОРСКИХ ЦЕЛЕЙ
Вид РИД
Изобретение
Изобретение относится к комплексам разведки морских надводных целей.
Известны способы обнаружения морских надводных целей (кораблей, судов, стационарных и дрейфующих платформ и т.п.) посредством радиолокационных, оптических, акустических и иных сенсоров, установленных на берегу, а также на надводных и подводных платформах и летательных аппаратах (ЛА), в т.ч. космических - см., например, В. Вельцер «Аэроснимки в военном деле», М.: Воениздат, 1990, стр.17-24, 52-80, 236-241; И.В. Соловьев, Г.Н. Корольков, А.А. Бараненко и др. «Морская радиоэлектроника» под ред. В.А. Кравченко, СПб., Политехника, 2003, стр.10-29, 175-176.
Известны также якорные и придонные (на коротком минрепе) мины с контейнером, внутри которого размещается торпеда. После установки мины на заданное углубление в работу включается дежурный пассивный акустический канал, контролирующий окружающее водное пространство. С обнаружением шумов дежурный канал включает активную акустическую систему, осуществляющую идентификацию объекта и определяющую ее координаты и направление движения. Эта информация передается в систему управления (СУ) торпеды, вырабатывается команда на ее старт. После выхода из контейнера торпеда осуществляет самостоятельный поиск цели собственными сенсорами и ее уничтожение - см., например, Ю.Л. Коршунов, Б.К. Лямин «Мины ВМФ СССР», СПб.: Гангут, 1998, стр.32.
Ближайшим аналогом предлагаемого технического решения является способ обнаружения морских целей, реализованный в противолодочной мине Мк60 «Кэптор» (США) - см., например, А.Ф. Забнев «Торпедное оружие», М., Воениздат, 1984, стр.46; Л.П. Хияйнен «Развитие зарубежных подводных лодок и их тактики», М., Воениздат, 1988, стр.139, 225. Следует отметить, что пассивный сторожевой акустический канал мины «Кэптор» состоит из гидрофонов, счетно-решающей аппаратуры (СУ мины) и источников питания. Аппаратура СУ мины, обнаружив цель, определяет дистанцию до нее, классифицирует ее по принципу «свой»-«чужой» и обеспечивает пуск торпеды в направлении на цель. Заявляемый срок службы мины без подъема и ремонта 2…5 лет. Ведутся работы по увеличению глубины погружения контейнера до 800 м и увеличению радиуса реагирования мины.
Однако ближайший аналог не обеспечивает возможностей поиска морских надводных целей и освещения надводной обстановки на пространствах в десятки/сотни квадратных километров, а также передачи данных о координатах цели внешним потребителям (например, в штабы и на ударные комплексы) в реальном масштабе времени.
Целью предлагаемого изобретения является создание способа обнаружения морских надводных целей с трансляцией этих данных неограниченному количеству потребителей, основанного на технологиях автономной автоматической работы пассивных и активных сенсоров, размещаемых на стационарной подводной и подвижной воздушной платформах.
Указанная цель достигается тем, что перед погружением платформы в воду на подвижный носитель вводят координаты точки погружения, платформу дополнительно снабжают устройствами радиоприема и звукоподводного приема сигналов пункта управления, в качестве подвижного носителя активного сенсора применяют беспилотный летательный аппарат (БЛА) самолетного типа со складным крылом и ракетной стартово-разгонной ступенью (СРС), при этом контейнер со сложенным внутри него БЛА отделяют от подводной платформы и осуществляют его подъем к поверхности воды (всплытие), при выходе контейнера из-под воды производят открытие контейнера, запуск БЛА в воздух и его скоростной подъем на высоту маршевого полета посредством ракетной СРС, далее производят отделение СРС от БЛА, раскрытие крыла БЛА в маршевое положение, запуск двигательной установки (ДУ) БЛА, включение активного сенсора БЛА на излучение, определение собственных координат и составляющих скорости БЛА, поиск по программе, обнаружение и идентификацию надводных целей, передачу сообщений о координатах обнаруженных целей неограниченному числу потребителей по радиоканалу, смену (в случае необходимости) программы полета БЛА по радиосигналу из пункта управления, приземление или приводнение БЛА в расчетной зоне после выработки энергоресурсов ДУ. При этом в качестве активного сенсора БЛА может быть применен радиолокатор бокового обзора (РБО) либо радиолокатор бокового обзора с синтезированием апертуры антенны (РСА). Кроме того, БЛА может дополнительно снабжаться радиопеленгатором излучения морских надводных целей и ЛА дальнего радиолокационного обнаружения (ДРЛО), а также оптико-электронной системой. В качестве ДУ БЛА может быть применена винтомоторная установка с электродвигателем либо двигателем внутреннего сгорания со складными лопастями винта. При этом контейнер с БЛА может быть покрыт по внешней поверхности шумопоглощающим (противогидролокационным) покрытием, а также снабжен системой аварийного затопления, которую задействуют по сигналу от датчика гидростатического давления, перемещения, сигналу из пункта управления либо по таймеру. В свою очередь, подводная платформа может быть дополнительно снабжена передающим устройством звукоподводной связи с пунктом управления. Антенну радиоканала платформы планируется программно поднимать из-под воды (в расчетные интервалы времени связи с пунктом управления) посредством буя с положительной плавучестью и притапливать на глубину не менее 15 м в промежутках между интервалами времени связи. Дополнительно подводная платформа может быть снабжена парашютом, который автоматически раскрывают при сбросе платформы с ЛА (при авиационной установке платформы в заданном районе акватории) и автоматически отделяют при ее приводнении; при этом парашют снабжают балластным грузом для его затапливания после отделения от платформы. Следует отметить, что в ряде случаев - например, для базирования таких платформ на подводных лодках (ПЛ) - их калибр может составлять 533 мм либо 650 мм (для установки платформ в воду через существующие торпедные аппараты ПЛ), а также 670 мм при длине 9 м (для установки платформ в воду из контейнеров противокорабельных крылатых ракет типа «Оникс»). Дополнительно подводная платформа может быть снабжена развертываемыми панелями деформации ее гидролокационного портрета.
Принципиальная схема устройства, реализующего предлагаемое техническое решение, представлена на фиг.1 (вариант), на фиг.2-4 показаны этапы работы данного устройства, на фиг.5 приведен вариант компоновочной схемы БЛА.
Приняты обозначения:
1 - герметичный отделяемый контейнер БЛА;
2 - герметичный контейнер приборного комплекса подводной платформы;
3 - якорь с источником электропитания;
4 - минреп (включая кабельную связь);
5 - трос (включая кабельную связь);
6 - буй (включая аппаратуру радиоканала связи);
7 - антенна радиоканала;
8 - панель деформации гидролокационного портрета;
9 - парашют;
10 - балластный груз;
11 - БЛА; 12-СРС БЛА;
13 - блок двигателей подводного хода контейнера БЛА (вариант);
14 - сбрасываемая крышка контейнера БЛА;
15 - шумопоглощающее (противогидролокационное) покрытие;
16 - блок гидрофонов сторожевого канала (пассивный акустический сенсор);
17 - блок (устройство) звукоподводной связи;
18 - аппаратно-программный комплекс (СУ) платформы, включая в т.ч. систему аварийного затопления;
19 - винтомоторная установка БЛА (ДУ БЛА);
20 - бортовой РБО (РСА) БЛА;
21 - топливный бак (аккумуляторный отсек) БЛА;
22 - СУ БЛА;
23 - фюзеляж БЛА;
24 - консоль крыла БЛА;
25 - аэродинамические управляющие поверхности БЛА.
Функционирование технических устройств по предлагаемому способу обнаружения морских целей осуществляется следующим образом. Подводная платформа в сборе (фиг.1) должна скрытно устанавливаться в заданном районе акватории с подводных и/или надводных кораблей (судов) и/или авиасредств (фиг.2). После установки на грунт платформа функционирует в сторожевом режиме. По сигналу пункта управления (сигналу сторожевого канала, программе) производится отделение контейнера со сложенным БЛА от заякоренной подводной платформы, подъем контейнера к поверхности воды (например, за счет положительной плавучести и/или двигателей подводного хода), выход контейнера из-под воды и его открытие (например, посредством сброса крышки верхнего торца), запуск БЛА в воздух и его скоростной подъем на высоту маршевого полета посредством задействования СРС, далее - отделение СРС от БЛА, раскрытие консолей крыла БЛА в маршевое положение, запуск ДУ БЛА и переход БЛА в режим штатного маршевого полета (фиг.3).
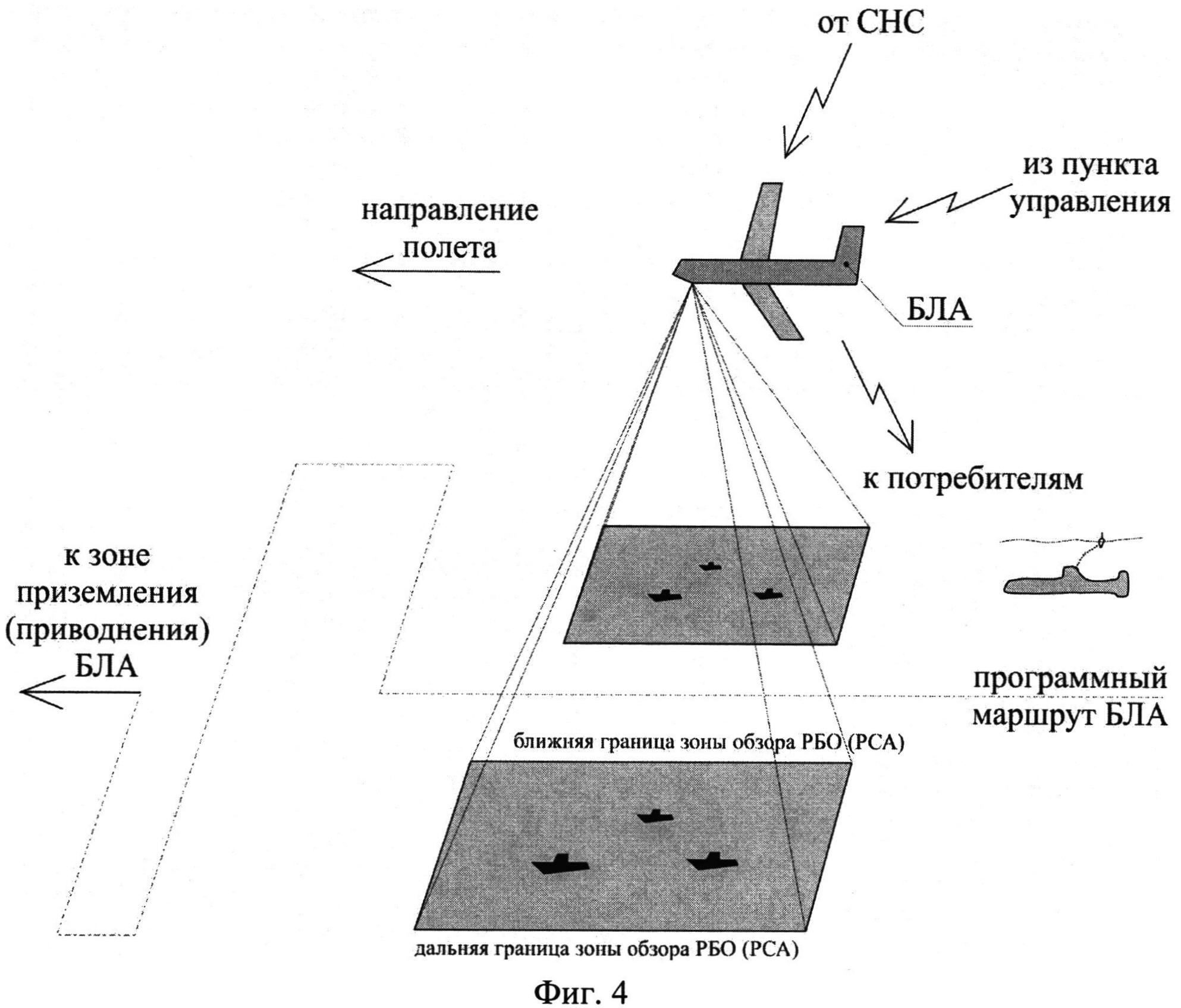
В начале режима штатного маршевого полета производится автоматическое включение активного сенсора БЛА (например, РБО или РСА) на излучение, а также включение дополнительных сенсоров БЛА, если они имеются (например, радиопеленгатора, пассивной оптико-электронной системы и т.п.), определение собственных координат и составляющих скорости БЛА, поиск по программе, обнаружение и идентификация (в т.ч. всепогодная круглосуточная) морских надводных целей, передача сообщений о координатах (координатах и векторах скоростей) обнаруженных целей неограниченному числу потребителей (например, на ударные ПЛ) по радиоканалу БЛА, смену (в случае необходимости) программы полета БЛА (маршрута, высоты, скорости полета, режима работы бортовых сенсоров, передатчиков БЛА и т.п.) по радиосигналу из пункта управления (фиг.4), приземление или приводнение БЛА в расчетной зоне после выработки энергоресурсов ДУ.
Вариант конструктивно-компоновочной схемы БЛА в рамках предложенного технического решения представлен на фиг.5.
Подводная платформа включает в свой состав (фиг.1): герметичный контейнер поз.1 с размещенным внутри сложенным ампулизированным БЛА поз.11 и СРС поз.12, герметичный контейнер поз.2 приборного комплекса (СУ) поз.18 подводной платформы, отделяемый при погружении якорь поз.3 с размещенным внутри источником долговременного электропитания, «короткий» (вариант т.н. придонной постановки на грунт) либо «длинный» (вариант т.н. якорной постановки) минреп поз.4, обеспечивающий, помимо силовой, кабельную энергосвязь между источником электропитания в якоре поз.4 и приборным комплексом поз.18 контейнера поз.2.
Дополнительно подводная платформа оснащается управляемым буем поз.6 на тросе поз.5, который обеспечивает, помимо силовой, кабельную электросвязь между приборным комплексом поз.18 контейнера поз.2 и аппаратурой приемного радиоканала платформы, размещаемой внутри буя поз.6. Такое компоновочное решение принято с целью минимизации потерь в контурах и трактах радиоканала и его антенны поз.7; при этом низкочастотные управляющие и информационные сигналы между приборным комплексом и аппаратурой радиоканала относительно слабо затухают в кабельной связи троса поз.5. Следует отметить, что буй поз.6 имеет два штатных позиционных положения: на глубине не менее 15 м в т.н. спящем режиме (значение заглубления буя определяется невозможностью его визуального обнаружения в прозрачной спокойной воде) и с антенной поз.7 над поверхностью воды в программном режиме ожидания сигналов из пункта управления. Изменение позиционного положения буя поз.6 осуществляется путем сматывания/выборки троса поз.5, например посредством специализированной малошумной лебедки (на фиг.1 не показана) по командам приборного комплекса поз.18 платформы.
Представляется целесообразной комплектация подводной платформы одной либо несколькими панелями поз.8 искажения ее гидролокационного портрета (например, развертываемыми после посадки платформы на грунт). Совместно с шумопоглощающим (противогидролокационным) покрытием поз.15 контейнера поз.1 это кардинальным образом деформирует ожидаемые характерные очертания (в т.ч. гидролокационную тень) изделия и тем самым резко повышает его боевую устойчивость. Другим важным условием повышения боевой устойчивости изделия следует считать скрытность его постановки (фиг.2). При этом в случае применения авиационных носителей-постановщиков платформа в сборе дополнительно снабжается парашютом поз.9 с балластным грузом поз.10, который обеспечивает гарантированное затопление парашюта после приводнения и отцепки. Следует отметить, что поскольку подводная платформа в сборе не содержит каких бы то ни было поражающих элементов (боевых частей, зарядов и т.п.), - ее установка вне территориальных вод государства-объекта наблюдения не может являться актом агрессии, блокады или иного вооруженного вмешательства во внутренние дела этого государства.
При этом в случае истечения срока штатного функционирования, а также обнаружения и попытки несанкционированного извлечения (подъема, разоружения на месте) подводной платформы - целесообразно затопление контейнеров поз.1 и поз.2 по сигналу многоуровневой системы аварийного затопления (включена в состав комплекса СУ поз.18) от датчиков гидростатического давления, датчиков перемещения с места установки, сигналу из пункта управления (например, реализующего имитацию срабатывания датчиков перемещения) либо таймеру.
Для скрытной постановки подводной платформы с погруженных ПЛ целесообразно ее конструктивное исполнение в калибрах стандартных торпедных аппаратов 533 мм либо 650 мм. Для ПЛ, вооруженных крылатыми ракетами типа «Оникс», - возможно увеличение калибра платформы до 670 мм и общей длины (в т.ч. пакета из нескольких последовательно размещенных платформ) до 9 м.
Перед постановкой (погружением платформы в воду) в бортовую СУ поз.22 БЛА поз.11 вводят координаты точки погружения, что позволяет БЛА приступить к обнаружению и выдаче координат (координат и составляющих скорости) морских надводных целей немедленно после его скоростного подъема на маршевую высоту посредством СРС поз.12 и развертывания в маршевую конфигурацию (раскрытие консолей крыла поз.24, аэродинамических управляющих поверхностей поз.25, включение ДУ поз.19, РБО (РСА) поз.20 и т.п.; отделение СРС поз.12).
При этом для осуществления старта БЛА поз.11 в воздух контейнер поз.1 отделяется от контейнера поз.2 и за счет собственной положительной плавучести и/или с использованием двигателей подводного хода поз.13 (например, на базе ракетных двигателей твердого топлива) всплывает к поверхности воды. При выходе контейнера поз.1 из-под воды (со скоростью, исключающей его опрокидывание волной) крышка поз.14 сбрасывается, и под действием, например, внутриконтейнерного порохового аккумулятора давления (на фиг.1 не показан) и/или тяги ракетных двигателей СРС поз.12 сложенный БЛА поз.11 выбрасывается в воздух, осуществляя далее скоростной набор высоты посредством СРС поз.12.
При этом команда на отделение контейнера поз.1 и старт БЛА поз.11 поступает, как правило, из пункта управления по радио либо звукоподводному каналу связи. В отдельных случаях (например, при проходе в зоне чувствительности гидрофонов поз.16 сторожевого сенсора платформы характерного корабельного ордера, например, авианосного соединения) команда на отделение контейнера поз.1 и старт БЛА поз.11 может поступать от приборного комплекса поз.18 платформы (после программной временной задержки на уход обнаруженного ордера на расстояние, с которого невозможно либо крайне затруднительно противодействие БЛА поз.11 на этапе его скоростного подъема на маршевую высоту полета и начала работы бортовых активных сенсоров на излучение). Следует отметить, что при автономном дальнем обнаружении морских надводных целей посредством гидрофонов поз.16 (в т.ч. развертываемых широкоапертурных) существенной проблемой являются акустические помехи в приповерхностном слое воды. В этой связи, как указывалось ранее, команду на отделение контейнера поз.1 (и, соответственно, старт БЛА поз.11 для обнаружения морских надводных целей) наиболее рационально выдавать (назначать на конкретное время) по радио и/или звукоподводному каналу связи из пункта управления. При этом пункт управления может располагать дополнительными данными, полученными от других источников информации, а роль гидрофонов поз.16 платформы сводится к контролю прилегающей акватории на предмет задержки старта подвижного носителя в случае недопустимо близкого (с точки зрения возможности оперативного противодействия БЛА поз.11 со стороны противовоздушной обороны корабельной группировки) расположения морских сил неприятеля.
В ряде случаев целесообразно оснащение некоторых подводных платформ передающим звукоподводным каналом (устройством) связи с пунктом управления дополнительно к приемному звукоподводному каналу (блоку, устройству) поз.17. При этом появляется возможность периодического дистанционного контроля состояния основных бортовых систем и оборудования платформы, акустической обстановки в данном районе акватории, др., что позволяет оптимизировать работу как отдельного изделия, так и группы изделий (в т.ч. со стартом нескольких БЛА поз.11 в соответствии с оперативной обстановкой).
При выходе контейнера поз.1 из-под воды и старте БЛА поз.11 в воздух, СУ поз.22 БЛА, независимо от наличия и работоспособности группировок навигационных спутников (ГЛОНАСС, GPS, «Бейдоу», в перспективе - «Галилео»), по введенным до погружения подводной платформы координатам места установки (соответственно, места старта БЛА поз.11) может с достаточной для целей разведки (целеуказания) точностью формировать привязанную к географическим координатам картину надводной обстановки в диапазоне работы бортовых сенсоров БЛА.
Следует отметить, что наличие активных лоцирующих сенсоров БЛА типа РБО (РСА) поз.20 позволяет проводить беспропускную разведку акватории независимо от погодных условий и времени суток (фиг.4). При этом большая маршевая высота (~10…20 км) и продолжительность (~4…48 часов) полета БЛА поз.11 - в рамках концепции т.н. аэродинамического спутника - позволяют просматривать до 0,5…5,0 млн. км2 поверхности одним аппаратом (без учета противодействия, например, в мирное время либо при работе БЛА вне радиуса действия корабельной противовоздушной обороны). Дополнительное оснащение БЛА поз.11 пассивными сенсорами - например, радиопеленгатором излучающих морских целей, излучающих авиасредств ДРЛО (например, типа E-2D «Хокай»), а также оптико-электронной системой видимого, инфракрасного и/или ультрафиолетового диапазонов длин волн - повышает возможности бортового комплекса обнаружения и селекции, а также скрытность работы БЛА (при использовании в работе сенсоров только пассивного типа). Конструктивно антенны радиопеленгатора целесообразно интегрировать в состав антенн РБО (РСА) - с целью увеличения их апертуры и взаимной привязки осей диаграмм направленности. Оптико-электронную систему БЛА целесообразно располагать в отдельном специализированном модуле с соответствующим иллюминатором (блоком иллюминаторов требуемых спектральных диапазонов пропускания).
Следует отметить, что скоростной подъем БЛА на высоту маршевого полета, минуя этап предварительного моторного набора высоты, и немедленное начало работы РБО (РСА) и других бортовых сенсоров - с соответствующим оперативным освещением пространств акватории - практически исключает возможность «мгновенного» противодействия со стороны морских (береговых) сил и средств неприятеля. При этом возможное последующее уничтожение (ослепление) БЛА - уже после обнаружения им целей, т.е. выполнения основной боевой задачи - явится дополнительным подтверждением наличия сил и средств неприятеля в данном районе. В мирное время применение БЛА ДРЛО может быть многократным.
Вариант конструктивно-компоновочной схемы БЛА поз.11 включает (фиг.5): фюзеляж поз.23, винтомоторную ДУ поз.19 тянущей либо толкающей схемы (в т.ч. с соосными винтами противовращения для улучшения балансировочных характеристик БЛА, а также симметрии его разворотов; при этом допускается складывание лопастей винтов в стартовой конфигурации БЛА), складываемые консоли крыла поз.24 (как правило, максимально большого удлинения для увеличения аэродинамического качества аппарата), управляющие поверхности поз.25, в т.ч. складываемые в стартовой конфигурации (например, горизонтальное и вертикальное оперение БЛА, в т.ч. выполняемое по схеме «утка»), в стартовой конфигурации - управляемую (как правило) СРС поз.12. При этом центральную часть фюзеляжа поз.23 - например, вблизи центра масс аппарата - целесообразно выделить для размещения топливного бака (аккумуляторного отсека в варианте электролета) поз.21, что существенно уменьшит разбежку центровок полностью заправленного и пустого БЛА с большой продолжительностью маршевого полета.
В составе бортовой СУ поз.22 БЛА поз.11 целесообразно иметь: систему автопилотирования и инерциальной навигации с коррекцией от спутниковых навигационных систем (СНС) и/или с астрокоррекцией (а также дополнительно с коррекцией от глобальных импульсно-фазовых радионавигационных систем LORAN-C и/или «Чайка»), блок управления полезной нагрузкой, радиосистему глобального оповещения неограниченного числа потребителей в нескольких диапазонах длин волн, в т.ч. через спутники-ретрансляторы, др. (на фиг.5 не показаны).
Эффект применения предложенного технического решения включает возможности:
- создания «асимметричной» морской силы, основанной на «минном» (в т.ч. заблаговременном) размещении в ключевых районах акватории Мирового океана необходимого (располагаемого) количества средств всепогодной круглосуточной воздушной разведки и целеуказания с их оперативным задействованием по сигналу либо программно (автономно «по месту»), а также ударных ракетных противокорабельных комплексов различных видов базирования и различного диапазона дальностей применения;
- сковывания боевого могущества крупных корабельных группировок, в т.ч. авианосных, путем возможного внезапного вскрытия их дислокации, структуры, маршрутов движения (маневров) в любом районе Мирового океана;
- неограниченного скрытного наращивания «минной» группировки средств разведки и целеуказания при невозможности для неприятеля их полномасштабного выявления и контроля (уничтожения);
- демонстрации присутствия (оперативного наблюдения) в особых ситуациях, а также применения для длительного высокодетального освещения обстановки при стихийных бедствиях и техногенных катастрофах (в т.ч. с возможностью многократного применения в мирное время);
- при разработке типоряда технических устройств для реализации данного способа обнаружения морских целей - возможность эксклюзивного экспорта подобных устройств как продукции двойного назначения.
Способ крепления плоского защитного стекла иллюминатора
Композиционный материал для замещения костной ткани
Роторный газотурбинный двигатель
Комплекс оружия для поражения наземных береговых объектов и способ его применения с подводных носителей
Обечайка корпуса летательного аппарата
Многоцелевая трансформируемая орбитальная система и способ ее применения
Ракетно-космический комплекс и способ функционирования ракетно-космического комплекса
Способ поражения цели сверхзвуковой крылатой ракетой и сверхзвуковая крылатая ракета для его осуществления
Ракета в транспортно-пусковом контейнере
Способ радиооптической маскировки надводного корабля
Способ повышения реактивной тяги в турбореактивном двухконтурном двигателе и турбореактивный двухконтурный двигатель для его реализации
Способ поддержания состава орбитальной группировки автоматических космических аппаратов
Способ контроля поражения цели крылатой ракетой
Головка эндопротеза тазобедренного сустава
Ножка эндопротеза тазобедренного сустава
Чашка эндопротеза тазобедренного сустава
Имплантат для замещения костных дефектов
Способ управления полетом баллистического летательного аппарата

