Результат интеллектуальной деятельности: СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ МАНЕВРИРУЮЩЕГО ОБЪЕКТА
Вид РИД
Изобретение
Предлагаемое изобретение относится к радиолокации и может быть использовано в радиолокационной технике для обнаружения траектории маневрирующего объекта.
В настоящее время все большее распространение получают алгоритмы, в которых для обнаружения траектории объекта, в области значений параметров траектории маневрирующего объекта формируют смешанную апостериорную плотность распределения вероятностей (САПРВ), с использованием всех отсчетов амплитудных спектров по всем каналам системы обнаружения.
Известен способ обнаружения (захвата) траектории объекта [1] (аналог), заключающийся в излучении зондирующего сигнала, приеме отраженного сигнала, формировании САПРВ в области дальности, скорости, ускорения между обзорами, амплитуды. В качестве входных данных алгоритма используются отсчеты амплитудного спектра сигнала в каналах по дальности. Недостатком данного способа является то, что не учитывается влияние радиального ускорения объекта на амплитудный спектр сигнала, которое приводит к «размытию» спектра сигнала по каналам скорости. В результате оценки, формируемые при использовании таких входных данных, имеют либо недостаточную точность, либо вообще становится невозможным обнаружение. Также недостатком является предположение о линейном изменении параметров, входящих в вектор состояния захватываемой траектории, что при современном уровне развития летательных аппаратов не позволяет производить обнаружение траектории с достаточной вероятностью и скоростью.
В качестве прототипа выбран известный способ обнаружения (захвата) траектории маневрирующего объекта [2], заключающийся в излучении зондирующего сигнала, приеме отраженного сигнала, формировании САПРВ в области оцениваемых параметров. В качестве входных данных алгоритма так же, как и в аналоге используются отсчеты амплитудного спектра сигнала в каналах по дальности. Ускорение объекта оценивается по изменению радиальной скорости между наблюдениями. Недостатком данного способа является чрезмерно большой объем вычислительных операций, так как в вектор состояния включены параметры, характеризующие степень «размытия» спектра во входных данных.
Техническим результатом предлагаемого изобретения является повышение вероятности обнаружения траектории маневрирующего объекта.
Технический результат предлагаемого изобретения достигается за счет введения ускорения в вектор измеряемых параметров сигнала, отраженного от маневрирующего объекта. Технический результат достигается за счет введения многоканальности по ускорению, обеспечивающей компенсацию межпериодных фазовых набегов, вызванных ускоренным движением объекта, и оценку скорости изменения доплеровской составляющей.
Вектор состояния xk захватываемой траектории в k-й момент времени определяется соотношением:
xk=f(xk-1,vk-1).
где f(•) - нелинейная функция, связывающая вектор состояния на k-м и (k-1)-м шагах;
v - вектор шумов процесса на (k-1)-м шаге.
В отличие от способа-прототипа в вектор состояния xk, кроме амплитуды I сигнала и межпериодного набега фазы φC, включается скорость изменения (соответствующая ускорению объекта) межпериодного набега фазы  :
:
 .
.
Межпериодный набег фазы φC связан с радиальной скоростью соотношением:
 ,
,
где Vr - радиальная скорость;
λ - длина волны излучающего сигнала;
Tn - период повторения импульсов.
Вектор zk измерений на k-м шаге связан с вектором состояния соотношением:
zk=h(xk,nk),
где h(•) - функция, связывающая вектор xk состояния с вектором zk измерений;
nk - вектор шумов наблюдений на k-м шаге с дисперсией  .
.
Рекуррентный алгоритм обнаружения малоразмерного объекта состоит в вычислении на каждом шаге САПРВ  с помощью формулы Байеса:
с помощью формулы Байеса:
 ,
,
где xk - вектор состояния на k-й момент времени;
zk - измерения на k-м шаге;
p(zk|xk, Ek=1) - функция правдоподобия;
Ek - индикатор существования объекта (Ek=1 - объект существует, Ek=0 - объект отсутствует);
 - нормирующий множитель, определяемый по правилу:
- нормирующий множитель, определяемый по правилу:
 ,
,
 - априорное распределение вектора состояния x на k-м шаге, имеющее вид:
- априорное распределение вектора состояния x на k-м шаге, имеющее вид:

p(xk|xk-1) - переходная плотность распределения вероятностей вектора состояния между k-м и k-1-м шагами.
САПРВ  имеет вид:
имеет вид:
где Pd, Pb - априорные вероятности пропадания и появления объекта соответственно;
pb(xk) - априорная плотность распределения элементов вектора состояния xk на k-м шаге.
Первое слагаемое в данном выражении характеризует вероятность существования объекта на k-1 и k-м шагах, второе - вероятность появления на k-м шаге. САПРВ вычисляется на множестве точек, называемых в технической литературе парциальными фильтрами. Каждый i-й парциальный фильтр характеризуется вектором состояния, весом (значением САПРВ) и индикатором состояния соответственно: 
Для фильтров с  ,
,  экстраполированные значения вектора состояния определяются как
экстраполированные значения вектора состояния определяются как
 ,
,
где F - переходная матрица.
При линейном изменении вектора состояния матрица F имеет вид:
где T - период между наблюдениями.
Амплитуда I сигнала описывается односвязным марковским процессом. Для фильтров с  ,
,  значения вектора состояния
значения вектора состояния  формируют исходя из априорных вероятностей межпериодного набега фазы сигнала, скорости изменения межпериодного набега фазы сигнала и амплитуды принятого сигнала.
формируют исходя из априорных вероятностей межпериодного набега фазы сигнала, скорости изменения межпериодного набега фазы сигнала и амплитуды принятого сигнала.
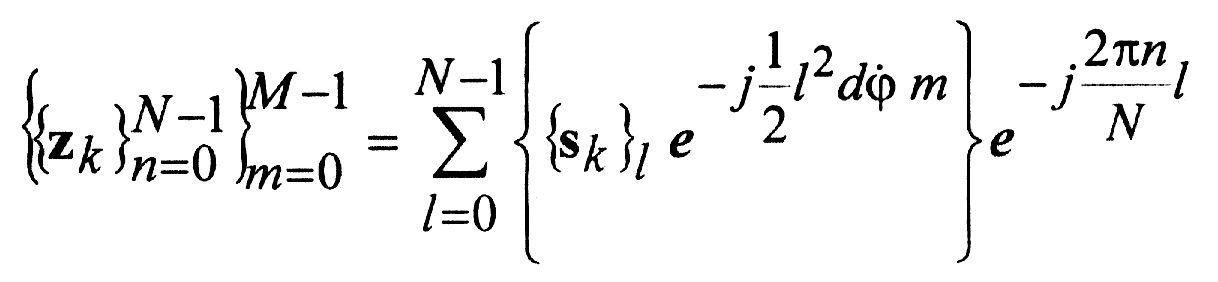
Поскольку предлагаемая модификация известного алгоритма заключается в том, что в вектор состояния , а соответственно и в вектор измерений zk, вводится информация о радиальном ускорении объекта, то на основе составляющих вектора состояния формируется вектор ожидаемого сигнала в p-м канале по скорости на основе вектора состояния i-го парциального фильтра:
 ,
,
где N - количество импульсов в пачке;
j - мнимая единица.
После вычисления  оценивается вероятность Pe обнаружения траектории объекта как отношение количества парциальных фильтров, для которых
оценивается вероятность Pe обнаружения траектории объекта как отношение количества парциальных фильтров, для которых  ,
,  , к общему количеству Npf фильтров:
, к общему количеству Npf фильтров:
 ,
,
где ∑ - знак суммы.
Траектория считается обнаруженной, если Pe превысило пороговое значение вероятности обнаружения траектории, которое вычисляется на основании критерия Неймана-Пирсона.
Следующие новые признаки заявляемого способа обладают существенными отличиями от способа-прототипа:
- компенсация радиального ускорения объекта во входных данных;
- включение в вектор измерений радиального ускорения объекта.
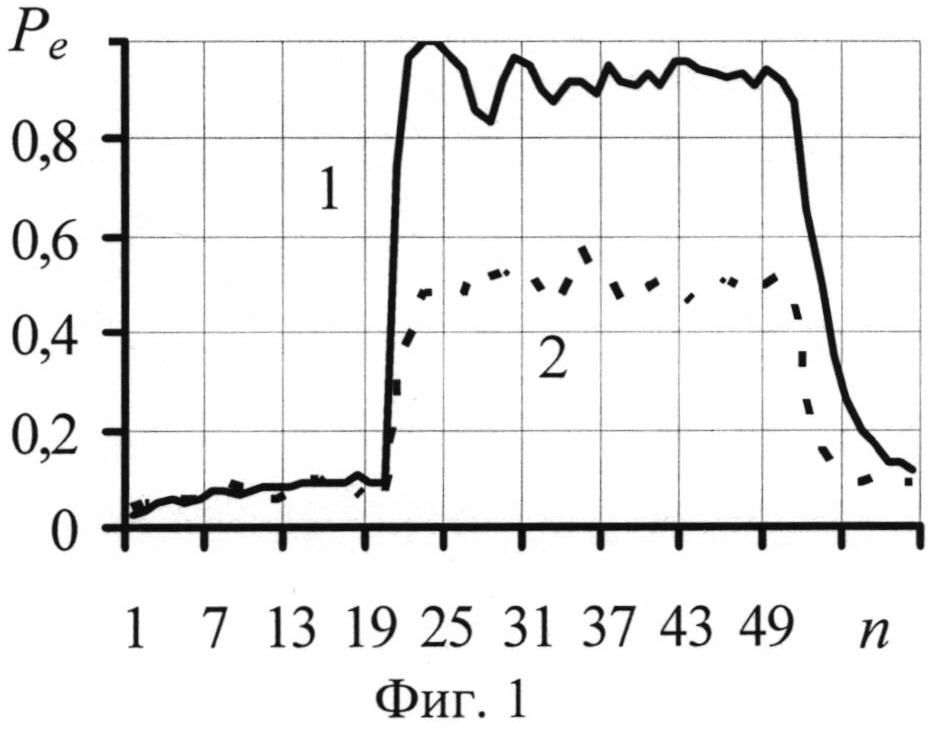
Оценка эффективности предлагаемого способа обнаружения траектории маневрирующего объекта проведена методом имитационного моделирования. На фиг.1 показаны: кривая 1 - вероятность обнаружения траектории объекта Pe от числа n наблюдений для предлагаемого способа; кривая 2 - вероятность обнаружения траектории объекта Pe от числа n наблюдений для способа прототипа. Число наблюдений n=60, при этом объект появился на 20-м наблюдении и пропал на 50-м наблюдении. Отношение сигнал-шум q=-4 дБ. Дополнительный межпериодный набег фазы, вызванный ускорением объекта 0,007 π.
Построение обнаружения траектории маневрирующего объекта для предлагаемого способа проведено методом имитационного моделирования при следующих параметрах: число парциальных фильтров Npf=10000; число N спектральных и временных отсчетов N=64; число каналов по ускорению M=20; вероятности Pd=0,01, Pb=0,1; априорная вероятность наличия траектории объекта 0,1. За время T наблюдения спектр радиосигнала, отраженного от маневрирующего объекта, занимает 11 частотных каналов. Параметры фильтров Калмана для парциальных фильтров Ek-1=1, Ek=1: СКО шума процесса для межпериодного набега фазы 10-4 π рад при скорости изменения межпериодного набега фазы 0,1 π рад/с и амплитуде 0,001.
Анализ данных результатов показывает, что при практической реализации заявляемый способ по сравнению со способом-прототипом позволяет повысить вероятность обнаружения траектории маневрирующего объекта на 0,4.
Техническая реализация заявляемого способа возможна на основе устройства, структурная схема которого изображена на фиг.2. Устройство состоит из буферного регистра 1, блока многоканальных фазовращателей 2, блоков быстрого преобразования Фурье (БПФ) 3, блоков вычисления модулей отсчетов БПФ 4, накопителя 5, порогового устройства 6.
Работу устройства можно описать следующим образом. Сигнал, отраженный от маневрирующего объекта, после преобразований в каскадах приемника и аналого-цифрового преобразования поступает на входы устройства, реализующего заявляемый способ. Квадратурные составляющие на входе устройства в одном элементе разрешения по дальности на k-м шаге описываются последовательностью комплексных величин:
 ,
,
где φ0 - случайная начальная фаза отраженного сигнала;
A - амплитуда принятого сигнала.
После записи и последующего считывания из буферного регистра 1 отсчеты sk поступают на входы M многоканальных фазовращателей 2, осуществляющих преобразование отсчетов в соответствии с алгоритмом:
 ,
,
где  - ширина канала по ускорению;
- ширина канала по ускорению;
m=0…M-1.
Затем полученные отсчеты последовательно проходят обработку в блоках 3 и 4, в результате чего на выходах блоков 4 получаются отсчеты
zk=|C(xk,nk|,
где C - оператор преобразования Фурье.
Векторные отсчеты zk амплитудных спектров на k-м шаге:
 .
.
Затем полученные отсчеты поступают в накопитель 5, где происходит оценка вероятности Pe обнаружения траектории по описанному выше правилу. Полученные оценки поступают на пороговое устройство 6. По результатам сравнения принимается решение об обнаружении или необнаружении траектории объекта.
Список литературы
1. Ristic В., Arulampalam S., Gordon N. Beyond the Kalman Filter. Particle Filters for Tracking Applica-tions. - Boston: Artech House. - 2004. - 302 p.
2. Zhaoping Wu, Tao Su, Radar Target Detect using Particle Filter // Radar Conference, 2010 IEEE. - 2010. - pp.955-958.
Способ обнаружения траектории маневрирующего объекта, заключающийся в том, что зондируют пространство пачками когерентных радиоимпульсов, осуществляют аналого-цифровое преобразование отраженного от маневрирующего объекта комплексного сигнала, представленного синфазной (действительной) и квадратурной (мнимой) составляющими, получают выборки сигналов, осуществляют дискретное преобразование Фурье, определяют модули полученных значений, вычисляют смешанную апостериорную плотность распределения вероятностей в множестве точек, определяемых амплитудой, дальностью, скоростью, ускорением, вычисляют отношение количества точек, в которых объект существует в момент вычислений и на предыдущем шаге, к общему количеству точек, сравнивают полученное отношение с порогом, на основании сравнения принимают решение об обнаружении или необнаружении траектории объекта, отличающийся тем, что дискретное преобразование Фурье осуществляют для множества каналов по ускорению, в каждом из которых перед вычислением дискретного преобразования Фурье осуществляют фазовый сдвиг, для компенсации межпериодного фазового набега за счет ускорения, в соответствии с фазовыми сдвигами формируют оценки ускорения, являющиеся координатами точек для вычисления смешанной апостериорной плотности pacпpeдeлeния вероятностей.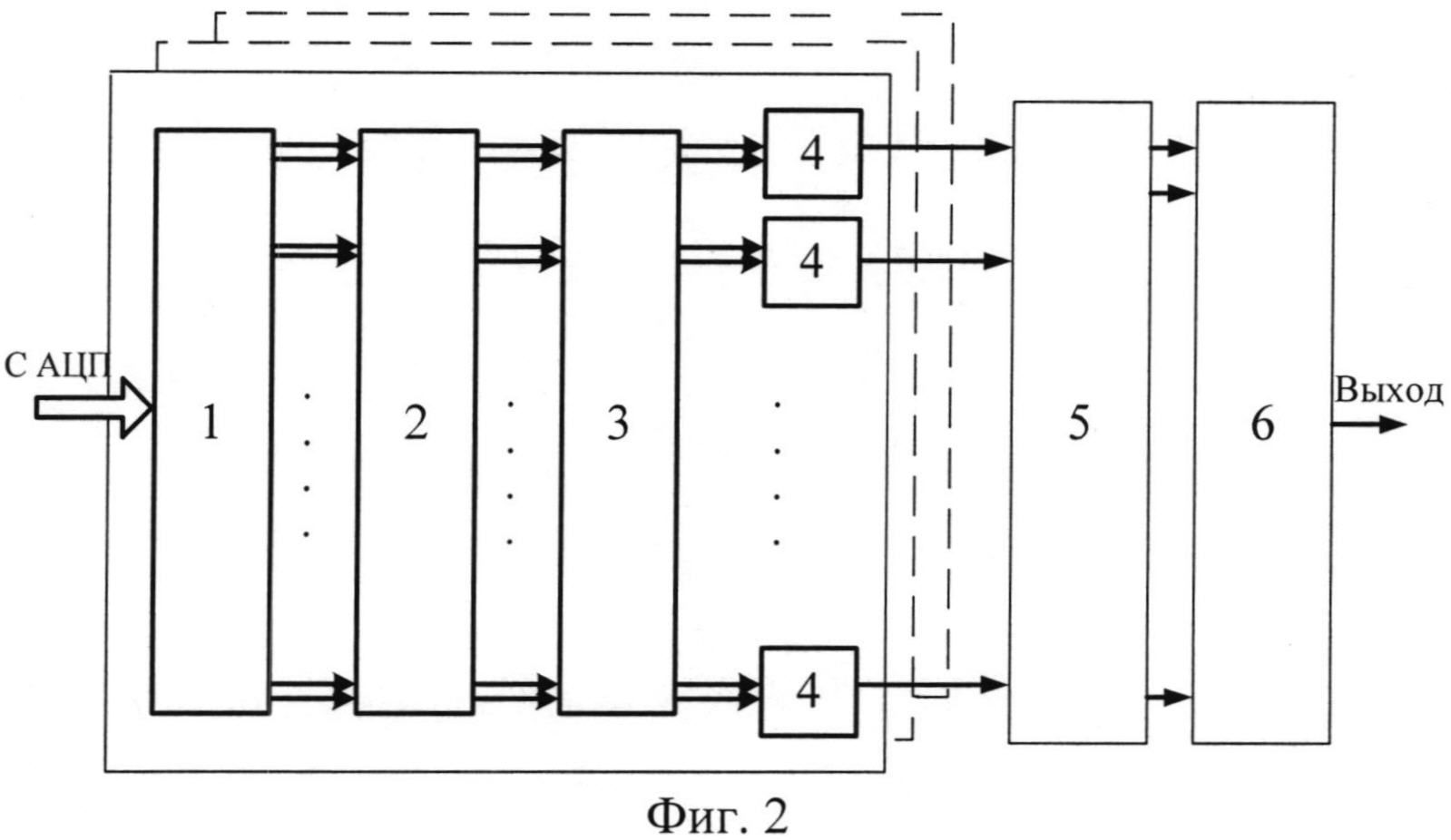
Способ формирования трехмерного изображения земной поверхности в бортовой четырехканальной доплеровской рлс
Электровакуумный прибор свч
Способ обработки последовательности изображении для определения координат объектов на основе комплексирования базовых алгоритмов
Зонд атомно-силового микроскопа с нанокомпозитным излучающим элементом, легированным квантовыми точками и магнитными наночастицами структуры ядро-оболочка
Адаптивный режекторный фильтр
Адаптивный компенсатор фазы пассивных помех
Способ обнаружения заданного механического воздействия для идентификации пользователя и устройство для его осуществления
Способ увеличения полосы захвата системы фазовой автоподстройки частоты с знаковым логическим фазовым дискриминатором и устройство для его реализации
Адаптивный вычислитель для режектирования помех
Вычислитель для адаптивного режектирования помех
Способ формирования биполярных сигналов для передачи данных через воздушный зазор и устройство для его осуществления
Способ измерения расстояния от излучателя до контролируемого объекта на основе чм локатора
Измеритель доплеровской фазы пассивных помех
Способ формирования трехмерного изображения земной поверхности в бортовой доплеровской рлс с линейной антенной решеткой
Способ формирования трехмерного изображения земной поверхности в бортовой четырехканальной доплеровской рлс
Электровакуумный прибор свч
Способ обработки последовательности изображении для определения координат объектов на основе комплексирования базовых алгоритмов
Зонд атомно-силового микроскопа с нанокомпозитным излучающим элементом, легированным квантовыми точками и магнитными наночастицами структуры ядро-оболочка
Адаптивный режекторный фильтр
Адаптивный компенсатор фазы пассивных помех

