Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ РОБОТИЗИРОВАННЫМ СРЕДСТВОМ ПО РАДИОКАНАЛУ
Вид РИД
Изобретение
Изобретение относится к наземным робототехническим средствам транспорта груза в заданную точку пространства, а также доставке роботизированного средства в заданное место для выполнения им иных функций без присутствия человека.
Известен беспилотный летательный аппарат, в котором управление осуществляется на основе измерения собственных координат в пространстве с помощью спутниковой навигационной системы [1]. Аналогичные решения существуют и для наземных роботизированных средств. Основным недостатком подобных технических решений является то, что точность позиционирования и точность управления оказывается низкой. Ошибка позиционирования может достигать нескольких десятков метров, особенно если движение наземного робототехнического средства осуществляется в условиях высокого уровня помех из-за отражения сигналов спутников, их экранирования или присутствия в частотном диапазоне их радиосигнала естественных или искусственных помех высокого уровня.
Этот недостаток устраняется при использовании радиоуправляемых роботизированных средств, находящихся в прямой видимости оператора. В частности, это может быть беспилотный летательный аппарат [2] или советский довоенный роботизированный радиоуправляемый танк (1939 года выпуска Т-26) [3], или современный американский телеуправляемый робот Gladiator TUGV [3]. Основным недостатком всех этих технических решений является то, что пропускная способность канала связи резко увеличивается в случае, когда робот исчезает из прямой видимости оператора. В этом случае приходится использовать широкополосный канал радиосвязи для перехода к трансляции видеосигнала с телевизионной камеры, расположенной на борту робототехнического средства. Тогда оператор производит управление роботизированным средством, используя данные телевизионной бортовой камеры. В случае если канал связи для передачи телевизионного сигнала исчезает, радиоуправление роботизированным средством прекращается.
Наиболее близким к предлагаемому техническому решению является стереоскопический способ измерения расстояний и судовой дальномер-пеленгатор [4]. По этому способу используются две одинаковые оптические системы, которые наводятся на объект, расстояние до которого надо измерить. Далее вычисляется расстояние до объекта путем измерения расхождения крайних точек объекта в двух оптических системах, исходя из знания расстояния между параллельными оптическими осями стереоскопической системы (решается триангуляционная задача). Недостатком данного технического решения является то, что оно не может использоваться без участия человека. При расположении бинокулярного дальномера-пеленгатора на борту корабля человек должен направлять пеленгатор-дальномер на объект, до которого оценивается расстояние, так чтобы этот объект находился на поперечной оптической оси обоих окуляров.
Задача предлагаемого изобретения направлена на повышение уровня автономности управления роботизированным средством и, как следствие, снижение требований к пропускной способности радиоканала связи.
Технический результат от решения поставленной задачи заключается в том, что управление роботизированным средством, не находящимся в поле зрения оператора, осуществляется с помощью двух или более видеокамер, расположенных на борту роботизированного средства, при этом видеокамеры синхронно делают снимки, далее оператор на снимках отмечает ориентир, дает команду роботизированному средству о движении на заданное расстояние по отношению к выделенному ориентиру и задает траекторию движения, при этом в бортовом вычислительном устройстве запоминают образ ориентира, выделенного оператором на имеющихся цифровых снимках, через бортовое устройство управления роботизированное средство разворачивают для движения по заданной траектории, отслеживают движение образа-ориентира на цифровых снимках с бортовых видеокамер, далее осуществляют движение по заданной траектории, при этом постоянно вычисляют расстояние до ориентира, а также положение ориентира в поле зрения видеокамер и его масштаб при правильной траектории движения; далее при движении роботизированного средства с помощью устройства управления минимизируют разницу между ожидаемым положением центра ориентира или его оконечными точками и реально наблюдаемым положением центра ориентира или его оконечными точками.
При реализации предложенного способа по п.1 формулы оператору приходится обводить рамкой ориентир на двух цифровых снимках. Если на борту роботизированного средства будет установлено четыре видеокамеры, то оператору придется четыре раза выделять образ ориентира на четырех цифровых фотографиях (отмечать манипулятором объект, являющийся ориентиром как минимум в правом и левом изображениях). Для того чтобы уменьшить трудозатраты оператора управления по п.2 формулы изобретения, предложено автоматизировать процесс поиска обозначенного оператора фрагмента одного изображения на других изображениях.
Дополнительный технический результат заключается в том, что оператор управления указывает ориентир только на одном изображении бортовой видеокамеры, поиск аналогичных изображений ориентира на другом изображении (других изображения) осуществляют автоматически по характерным особенностям яркости и цвета выделенного изображения, начинают поиск с места изображения ориентира, указанного оператором в первом изображении, далее управляющий оператор подтверждает верно выделенное изображение ориентира и сдвигает выделенный фрагмент изображения, если он определен с ошибкой.
Новым в предложенном способе является то, что роботизированное средство одновременно снимает двумя или более бортовыми видеокамерами две или более цифровые фотографии и передает их по радиоканалу оператору управления. Далее оператор управления выделяет на своем компьютере на двух или более изображениях один и тот же ориентир. После этого оператор управления задает роботизированному средству траекторию движения, например движение на ориентир по прямой до половины расстояния до ориентира, или, например, движение по траектории, отклоняющейся от прямолинейного движения на заданный угол до половины расстояния до ориентира. Кроме того, в бортовом вычислительном устройстве запоминают образ ориентира, выделенного на имеющихся цифровых снимках. Далее с помощью бортового устройства управления ориентируют подвижное роботизированное средство на движение в нужном направлении и начинают движение. При этом отслеживают движение ориентира в момент изменения направления будущего движения на всех цифровых снимках бортовых видеокамер.
Кроме того, во время движения или до начала движения вычисляют расстояние до ориентира, а также ожидаемое положение ориентира при движении по заданной траектории. Далее при движении по заданной траектории осуществляют контроль расстояния до ориентира и его положения в поле видеокамер. Вычисляют также масштаб ориентира, изменяющийся при движении. Если положение ориентира не соответствует ранее вычисленному прогнозу, то корректируют направление движения, минимизируя ошибки. При достижении нужной точки на траектории движения, когда ориентир попадает в расчетную область, движение прекращают, фотографируют данные, попавшие в поле зрения видеокамер, и передают эти данные оператору управления.
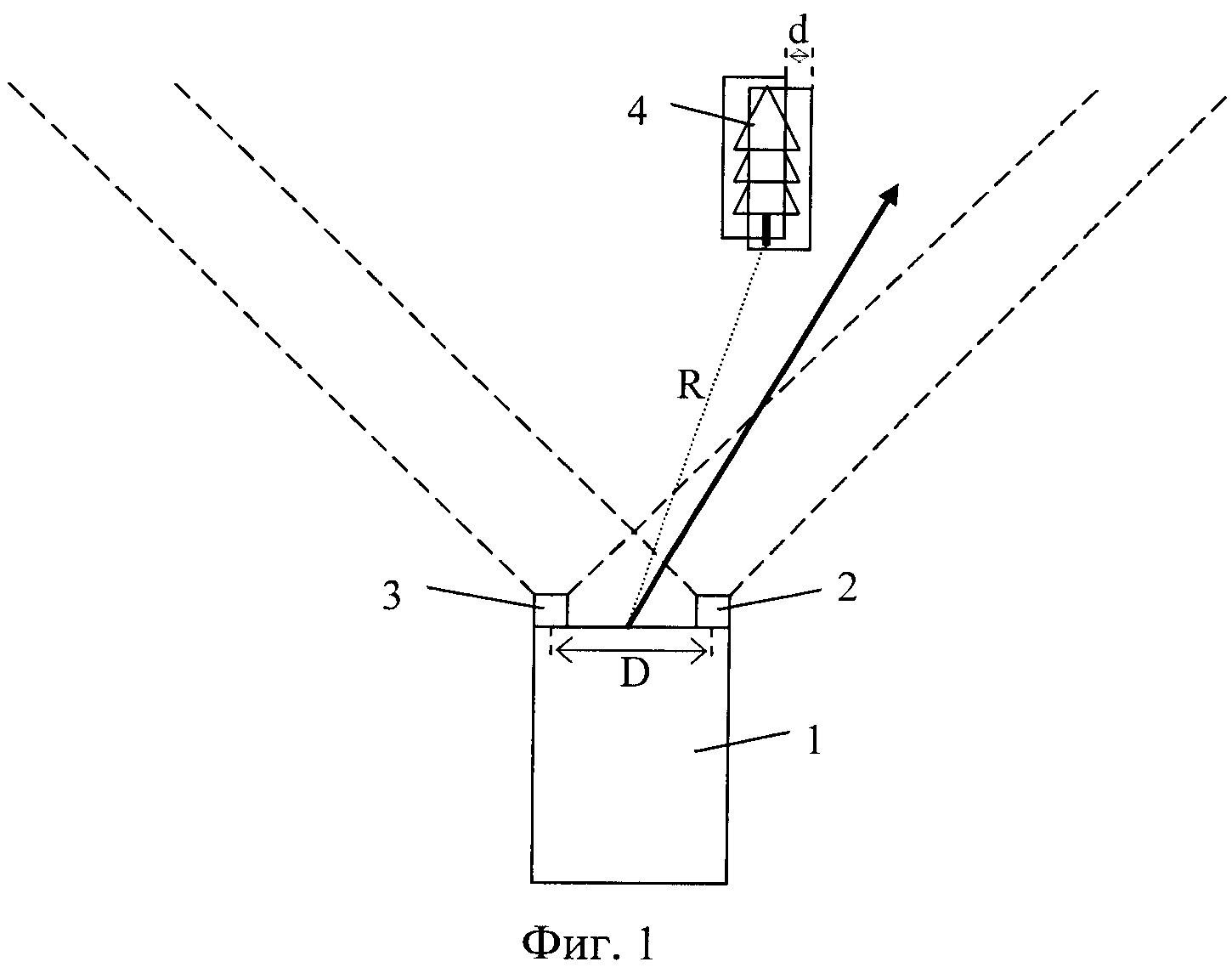
На фиг.1 приведен пример реализации предложенного способа управления роботизированным средством, где:
1 - роботизированное средство;
2 - правая видеокамера (ее поле зрения выделено пунктиром);
3 - левая видеокамера (ее поле зрения выделено пунктиром);
4 - ориентир на местности в виде одиночно стоящего дерева.
При реализации предложенного способа в его простейшем варианте с двумя бортовыми видеокамерами (фиг.1) осуществляют одновременную цифровую съемку ориентира (одиночно стоящего дерева). Далее два цифровых снимка передают по радиоканалу с борта роботизированного средства оператору, управляющему данным роботизированным средством. Оператор смотрит на два цифровых снимка и указывает на первом и втором снимках ориентир (одиночно стоящее дерево), выделяя его на первом и втором снимках прямоугольниками. При этом координаты прямоугольников, выделяющих ориентир на двух снимках, не совпадают из-за наблюдения за ориентиром с двух разных точек (двух видеокамер с базовым расстоянием между ними - D). По предложенному способу далее решается триангуляционная задача определения расстояния до ориентира путем вычисления разности горизонтальных координат прямоугольников, захватывающих ориентир на двух снимках - d. Расстояние до ориентира R рассчитывается на ЭВМ, например, по формулам, приведенным в описании прототипа [4], либо по заранее вычисленной таблице.
Далее по предложенному способу полученные данные (координаты прямоугольников, охватывающих ориентир, на двух снимках и вычисленное расстояние до ориентира) передаются на борт роботизированного средства. Оператор управления указывает направление движения роботизированного средства (стрелка на фиг.1), которое передается на борт роботизированного средства. Кроме того, оператор по радиоканалу отправляет роботизированному средству задание с указанием расстояния движения (например, оператор указывает расстояние, равное половине расстояния до ориентира). При этом управляющая информация, посылаемая по радиоканалу от оператора на борт роботизированного средства, занимает крайне малый объем (несколько бит).
Получив управляющую информацию, бортовое устройство управления, разворачивает роботизированное средство по заданному курсу. При этом ориентир смещается, однако он автоматически отыскивается на всех цифровых снимках бортовых видеокамер. Смещение ориентира в поле зрения видеокамер осуществляется плавно, бортовое вычислительное устройство постоянно вносит корректировки в цифровые изображения, смещая в каждом из цифровых снимков рамки, выделяющие запомненный в вычислительном устройстве образ ориентира.
Далее бортовое вычислительное устройство осуществляет решение обратной триангуляционной задачи, то есть определяет будущие траектории движения рамок ориентира по цифровым снимкам двух портовых видеокамер во время движения по заданной траектории. Вычисления ведутся по триангуляционным формулам, например, приведенным в описании прототипа [4] или по таблицам, зашитым в память бортовой вычислительной машины. При этом вычисляется траектория движения центров рамок, выделяющих на будущих цифровых снимках ориентир, а также вычисляются будущие размеры рамок (увеличивающиеся при движении в сторону ориентира).
После проделанных вычислений роботизированное средство начинает движение в указанную сторону. При этом движении автоматически выделяемый образ ориентира также начинает двигаться, однако из-за низкой точности приводов управления направлением движения траектория предсказанного движения ориентира по цифровым снимкам бортовых видеокамер будет отклоняться от расчетной. Для компенсации погрешностей управления бортовое устройство управления при движении роботизированного средства постоянно вносит корректировки в направление движения, компенсирующие неточность механизма управления, а также влияние неровностей рельефа местности.
Предложенный способ управления роботизированным средством позволяет обеспечить снижение требований к пропускной способности радиоканала связи. Это происходит из-за того, что роботизированное средство вообще не нуждается в управлении после того, как ему задан ориентир, направление движения и расстояние, которое оно должно пройти в указанном направлении. В итоге значительно поднимается уровень автономности роботизированного средства, которое нуждается в новых ориентирах и целеуказаниях только в отдельных точках траектории движения. Это значительно повышает автономность роботизированного средства по сравнению с аналогами, которые нуждаются в постоянном управлении роботизированным средством по широкополосному радиоканалу, возвращающему поток видеоинформации с борта роботизированного средства оператору. Реализация предложенного способа позволяет значительно снизить требования к пропускной способности канала радиосвязи между оператором управления и роботизированным средством. Так, если двигаться по заданной траектории 5 минут при телевизионной кадровой развертке 20 миллисекунд на кадр, то для передачи двух кадров (левого и правого изображений) потребуется всего 40 миллисекунд вместо 5×60×1000=300000 миллисекунд. Выигрыш по требованиям к каналу связи составляет 7500 раз. Можно либо в несколько тысяч раз сжать ширину канала связи, либо обеспечить тысячекратную избыточность информации и тем самым защититься от естественных и искусственных помех.
Предложенный способ по п.2 формулы изобретения позволяет снизить трудозатраты оператора на управление роботизированным средством, в большинстве случаев автомат поиска одинаковых фрагментов на двух изображениях срабатывает верно, и от оператора не требуется вводить корректировки, кроме того, в условиях плохой связи достаточно передать только одну цифровую фотографию.
Источники информации
1. Патент RU №2240588 C1 «Способ управления полетом беспилотного летательного аппарата», опубликовано: 20.11.2004. МПК: G05D 1/10, G01C 21/12, G08G 5/00, G01S 13/91. Авторы: Николаев Р.П., Григорьев Д.В., Весельев А.Д., Григорьев В.Г., Григорьев В.В.
2. Заявка RU №2010111030 A «Способ ассоциативного дистанционного управления беспилотным летательным аппаратом и устройство для его реализации», дата публикации заявки 27.09.2011 Бюл. №27. МПК: B64C 29/02. Авторы: Белобородько Э.И., Косоруков A.M., Скаткин И.О.
3. http://ru.wikipedia.org/wiki/Боевой_робот
4. Патент RU №2468336 C1 «Стереоскопический способ измерения расстояний и судовой дальномер-пеленгатор», опубликовано 27.11.2012, Бюл. №33. МПК: G01C 3/02, G01S 17/06. Авторы: Гузевич С.Н.
Способ биометрической защиты анонимности свидетелей при судебном делопроизводстве
Способ контроля исполнения домашнего ареста с биометрической аутентификацией контролируемого
Карданный подвес жидкостного ракетного двигателя
Способ определения общей окислительно-восстановительной активности фагоцитов в тесте восстановления нитросинего тетразолия при лейкозе крупного рогатого скота
Способ изготовления стеновых керамических изделий
Сырьевая смесь для изготовления стеновых керамических изделий
Способ гарантированного обезличивания электронных документов
Способ получений сырьевой смеси для декоративной стеновой керамики
Способ ускоренного твердофазного ферментирования отходного растительного сырья для производства кормов
Способ формирования электронных документов и устройство для его осуществления
Способ изготовления стеновых керамических изделий
Сырьевая смесь для изготовления стеновых керамических изделий
Способ гарантированного обезличивания электронных документов
Способ получений сырьевой смеси для декоративной стеновой керамики
Способ ускоренного твердофазного ферментирования отходного растительного сырья для производства кормов
Модульный автономный необитаемый подводный аппарат
Способ формирования аудита персональной биометрической информации
Способ формирования электронных документов и устройство для его осуществления
Способ защиты персональных данных биометрической идентификации и аутентификации
Автономный необитаемый подводный аппарат-амфибия

