Результат интеллектуальной деятельности: МЕХАНИЗМ ПОЗИЦИОНИРОВАНИЯ ВЫСОКОИНТЕНСИВНОГО ФОКУСИРОВАННОГО УЛЬТРАЗВУКА
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к позиционирующему механизму, в частности позиционирующему механизму для позиционирования излучателя высокоинтенсивного фокусированного ультразвука в системе высокоинтенсивного фокусированного ультразвука.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
В области высокоинтенсивного фокусированного ультразвука фокусированный ультразвук применяют для ультразвукового разрушения или обработки области ткани внутри субъекта с высокоинтенсивным фокусированным ультразвуком. Высокоинтенсивный фокусированный ультразвук может быть использован для нагревания области внутри субъекта, может быть использован для разрушения маленьких капсул лекарства и активации лекарства, может быть использован для абляции ткани и при повышенной мощности можно использовать кавитацию для разрушения областей внутри субъекта. Высокоинтенсивный фокусированный ультразвук фокусируется на область субъекта с использованием излучателя. Очень часто излучатели содержат множественные элементы и посредством управления фазой и амплитудой отдельных элементов можно до некоторой степени регулировать фокус ультразвука внутри объекта. В дополнение к управлению фазой и амплитудой ультразвука, излучаемого элементами ультразвукового излучателя, излучатель довольно часто перемещают вручную. Для лечения молочной железы используют обычно три степени свободы для механического перемещения излучателя высокоинтенсивного фокусированного ультразвука. В других режимах лечебного воздействия, например для лечения фиброидов, используют пять степеней свободы.
Когда область объекта разрушают ультразвуком, целесообразно получение подробной информации об анатомии или внутренней структуре субъекта. В результате ультразвуковое разрушение субъекта наводят обычно с использованием средства медицинской визуализации. Примером такого средства медицинской визуализации является магнитно-резонансная визуализация.
В международной публикации WO 2008/026134 A1 патентной заявки раскрыт манипулятор для управления позицией излучателя энергии.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение предлагает механизм позиционирования высокоинтенсивного фокусированного ультразвука, блок высокоинтенсивного фокусированного ультразвука, систему магнитно-резонансной визуализации, способ приведения в движение механизма позиционирования высокоинтенсивного фокусированного ультразвука и компьютерный программный продукт в независимых пунктах формулы изобретения. Варианты осуществления представлены в зависимых пунктах формулы изобретения.
При использовании магнитно-резонансной визуализации для наведения высокоинтенсивного фокусированного ультразвука на механизм, который применяют для приведения в движение или перемещения излучателя высокоинтенсивного фокусированного ультразвука, налагаются особые требования. Например, все части могут быть из немагнитного материала и могут выдерживать контакт со средой распространения ультразвука, в которую погружен излучатель высокоинтенсивного фокусированного ультразвука, конструкцию механизма помещают в водонепроницаемый контейнер, так что механизм также может быть водонепроницаемым, пространство, доступное для механизма, очень ограничено, так как туннель или область магнита для магнитно-резонансной визуализации должен вмещать как пациента, так и механизм и блок высокоинтенсивного фокусированного ультразвука. Применение более габаритного механизма требует применения магнита с туннелем большего размера и поэтому повышает стоимость объединенного блока магнитно-резонансной визуализации и высокоинтенсивного фокусированного ультразвука. И, наоборот, если механизм выполнен меньшего размера и более компактно, то необходимый туннель или область, приспособленный(ая) для вмещения субъекта внутри магнита магнитно-резонансной визуализации, уменьшается. Кроме того, целесообразно, чтобы электродвигатели и датчики, которые входят в состав механизма, не генерировали радиочастотных шумов.
Изобретение предлагает механизм позиционирования высокоинтенсивного фокусированного ультразвука для позиционирования излучателя высокоинтенсивного фокусированного ультразвука. Механизм содержит позиционирующую плиту, выполненную с возможностью вмещения излучателя высокоинтенсивного фокусированного ультразвука. Регулирование или манипуляцию физическим местоположением или позицией позиционирующей плиты производят приведением в движение позиционирующего механизма. Так как излучатель высокоинтенсивного фокусированного ультразвука может быть установлен на позиционирующую плиту, то регулирование позиции или местоположения позиционирующей плиты регулирует позицию или местоположение, или ориентацию излучателя высокоинтенсивного фокусированного ультразвука. Механизм дополнительно содержит опору механизма, выполненную с возможностью установки позиционирующего механизма. Механизм дополнительно содержит множество стержней. Каждый стержень имеет первый и второй конец, при этом первый конец каждого стержня формирует отдельное шаровое шарнирное соединение с позиционирующей плитой.
В контексте настоящей заявки следует считать, что стержень является жестким твердым телом. Стержень функционирует подобно или эквивалентен соединительному звену в рычажном механизме или механической связи. Механизм дополнительно содержит множество линейных приводов. Множество линейных приводов установлено на опоре механизма. Каждый из линейных приводов содержит блок. Второй конец каждого из множества стержней формирует отдельное шаровое шарнирное соединение с одним из приводных блоков. Механизм, который осуществлен вышеописанным образом, обладает несколькими преимуществами. Можно изготовить очень компактный механизм. Можно также сократить число раздвижных частей. Кроме того, вариант осуществления данного механизма допускает вычисление возможного метода позиционирования механизма для установки позиционирующей плиты в конкретную позицию или место. Упомянутое вычисление позволяет точно управлять излучателем высокоинтенсивного фокусированного ультразвука и позиционировать его.
Линейный привод в контексте настоящего изобретения является механизмом или компонентом приведения в движение, который выполнен с возможностью перемещения в линейном или прямолинейном направлении. Линейный привод может быть выполнен с использованием винтового механизма, стержня, который приводится в движение, гидравлической системы, линейного двигателя или пневматической системы. Приводной блок в контексте настоящего изобретения является блоком или компонентом, на котором можно устанавливать шаровое шарнирное соединение или компонент шарового шарнирного соединения. Шаровое шарнирное соединение в контексте настоящего изобретения является шарниром, который обеспечивает сферическую степень свободы. Шаровое шарнирное соединение может использовать шаровую опору и гнездо, или данное соединение может использовать систему поворотных шарниров. Шаровое шарнирное соединение может быть выполнено с использованием шаровой опоры и гнезда. Шаровое шарнирное соединение может быть сформировано посредством размещения либо гнезда, либо шаровой опоры либо на первом, либо на втором концах одного из множества стержней. Если шаровая опора находится на конкретном конце одного из множества стержней, то гнездо установлено на детали, с которой стержень формирует шаровое шарнирное соединение. Если гнездо расположено на стержне, то шаровая опора, которая выполнена с возможностью вмещения в гнездо, установлена на плите или блоке, с которой(ым) стержень формирует шаровое шарнирное соединение. Позиционирующий блок может быть отдельным компонентом, или ультразвуковой излучатель для системы высокоинтенсивного фокусированного ультразвука может выполнять функцию позиционирующего блока.
В другом варианте осуществления множество стержней содержит первый стержень, второй стержень, третий стержень, четвертый стержень, пятый стержень и шестой стержень. Множество линейных приводов содержит первый линейный привод, второй линейный привод и третий линейный привод. Первый линейный привод содержит первый приводной блок. Второй линейный привод содержит второй приводной блок. Третий линейный привод содержит третий приводной блок.
Первый конец первого стержня формирует первое шаровое шарнирное соединение с позиционирующей плитой. Первый конец второго стержня формирует второе шаровое шарнирное соединение с позиционирующей плитой. Первый конец третьего стержня формирует третье шаровое шарнирное соединение с позиционирующей плитой. Первый конец четвертого стержня формирует четвертое шаровое шарнирное соединение с позиционирующей плитой. Первый конец пятого стержня формирует пятое шаровое шарнирное соединение с позиционирующей плитой. Первый конец шестого стержня формирует шестое шаровое шарнирное соединение с позиционирующей плитой.
Первый стержень формирует седьмое шаровое шарнирное соединение с первым приводным блоком. Второй стержень формирует восьмое шаровое шарнирное соединение с первым приводным блоком. Третий стержень формирует девятое шаровое шарнирное соединение со вторым приводным блоком. Четвертый стержень формирует десятое шаровое шарнирное соединение со вторым приводным блоком. Пятый стержень формирует одиннадцатое шаровое шарнирное соединение с третьим приводным блоком. Шестой стержень формирует двенадцатое шаровое шарнирное соединение с третьим приводным блоком. Данный вариант осуществления полезен потому, что механизм, в котором он осуществлен, имеет три ортогональных степени свободы.
В другом варианте осуществления первое и второе шаровые шарнирные соединения установлены на первой общей оси. Второе и третье шаровые шарнирные соединения установлены на второй общей оси. Четвертое и пятое шаровые шарнирные соединения установлены на третьей общей оси. Седьмое и восьмое шаровые шарнирные соединения установлены на четвертой общей оси. Девятое и десятое шаровые шарнирные соединения установлены на пятой общей оси. Одиннадцатое и двенадцатое шаровые шарнирные соединения установлены на шестой общей оси. При указании, что шаровое шарнирное соединение установлено на общей оси, следует понимать, что в настоящем случае данное указание означает, что центр вращения шаровых шарнирных соединений, которые установлены на общей оси, зафиксирован на данной оси.
В другом варианте осуществления множество стержней содержит первый стержень, второй стержень, третий стержень, четвертый стержень, пятый стержень и шестой стержень. Множество линейных приводов содержит первый линейный привод, второй линейный привод, третий линейный привод, четвертый линейный привод и пятый линейный привод. Первый линейный привод содержит первый приводной блок. Второй линейный привод содержит второй приводной блок. Третий линейный привод содержит третий приводной блок. Четвертый линейный привод содержит четвертый приводной блок. Пятый линейный привод содержит пятый приводной блок.
Первый конец первого стержня формирует первое шаровое шарнирное соединение с позиционирующей плитой. Первый конец второго стержня формирует второе шаровое шарнирное соединение с позиционирующей плитой. Первый конец третьего стержня формирует третье шаровое шарнирное соединение с позиционирующей плитой. Первый конец четвертого стержня формирует четвертое шаровое шарнирное соединение с позиционирующей плитой. Первый конец пятого стержня формирует пятое шаровое шарнирное соединение с позиционирующей плитой. Первый конец шестого стержня формирует шестое шаровое шарнирное соединение с позиционирующей плитой.
Первый стержень формирует седьмое шаровое шарнирное соединение с первым приводным блоком. Второй стержень формирует восьмое шаровое шарнирное соединение со вторым приводным блоком. Третий стержень формирует девятое шаровое шарнирное соединение с третьим приводным блоком. Четвертый стержень формирует десятое шаровое шарнирное соединение с третьим приводным блоком. Пятый стержень формирует одиннадцатое шаровое шарнирное соединение с четвертым приводным блоком. Шестой стержень формирует двенадцатое шаровое шарнирное соединение с пятым приводным блоком. Данный вариант осуществления полезен потому, что механизм может быть компактным и имеет пять степеней свободы. Данное решение позволяет приводить блок высокоинтенсивного фокусированного ультразвука в сложное движение механизмом, который использует уменьшенный объем пространства.
В другом варианте осуществления второе, третье, четвертое и пятое шаровые шарнирные соединения установлены на первой общей оси. Девятое и десятое шаровые шарнирные соединения установлены на второй общей оси. Данный вариант осуществления полезен потому, что размещение приведенных сочетаний шаровых шарнирных соединений на упомянутых общих осях обеспечивает механизм, положение которого можно вычислять проще.
В другом варианте осуществления по меньшей мере один из множества линейных приводов содержит ползун линейного перемещения, винтовой привод и подшипник. По меньшей мере один из множества линейных приводов приводится в движение ультразвуковым двигателем. Винтовой привод в контексте настоящего изобретения является приводом, который превращает вращательное движение в поступательное движение. Винтовой привод может функционировать на резьбе, или винтовой привод может быть также шариковинтовой передачей или винтовой передачей скольжения. Винтовая передача скольжения использует элементы, которые скользят по резьбе приводного стержня. Ползун линейного перемещения в контексте настоящего изобретения является блоком, который приводится в линейное или прямолинейное движение. Ползун линейного перемещения может также выполнять функцию приводного блока. В настоящем описании термины ползун линейного перемещения и приводной блок можно использовать как синонимы. Если ползун линейного перемещения и приводной блок являются отдельными компонентами, то приводной блок может быть прикреплен к ползуну линейного перемещения. Ползун линейного перемещения может быть заблокирован от вращения поверхностью или стержнем. Трение между ползуном линейного перемещения и направляющей поверхностью или стержнем можно уменьшить применением подшипника. По меньшей мере один из множества линейных приводов приводится в движение ультразвуковым двигателем.
В другом варианте осуществления по меньшей мере один из множества линейных приводов приводится в движение с помощью рукоятки.
В другом варианте осуществления ползун линейного перемещения, винтовой привод и подшипник являются керамическими. Данный вариант осуществления полезен потому, что блоки высокоинтенсивного фокусированного ультразвука обычно погружены в жидкость для распространения ультразвука. Керамический ползун линейного перемещения, винтовой привод и подшипник будут в состоянии сохранять работоспособность в текучей или жидкой среде в течение длительного периода времени.
В другом варианте осуществления по меньшей мере один из множества стержней содержит пластик. Применение пластика для стержней дает преимущество в нескольких обстоятельствах. В системе магнитно-резонансной визуализации применение пластика полезно потому, что уменьшает объем применяемого металла. Кроме того, стержень можно выполнять из одной заготовки с гнездами для шарового шарнирного соединения, формуемого на концах. Данное решение устраняет потребность закрепления гнезд для шаровых шарнирных соединений на стержнях.
В другом варианте осуществления по меньшей мере один из множества стержней содержит полиоксиметилен-ацеталевый пластик.
В другом варианте осуществления по меньшей мере одна из с первой по двенадцатую шаровых опор содержит титановую шаровую опору. Применение титановых шаровых опор полезно потому, что титан совместим с сильными магнитными полями и, следовательно, может применяться в системе магнитно-резонансной визуализации. В общем, титан является очень жестким металлом и очень хорошо подходит для применения в качестве подшипника. К тому же, титан обладает очень высокой химической стойкостью и поэтому является хорошим выбором в качестве подшипника в системе, которая погружена в жидкость в течение длительного периода времени.
В соответствии с другим аспектом изобретения предлагается блок высокоинтенсивного фокусированного ультразвука. Блок высокоинтенсивного фокусированного ультразвука содержит механизм в соответствии с вариантом осуществления изобретения. Блок высокоинтенсивного фокусированного ультразвука дополнительно содержит систему приведения в движение для приведения в движение механизма. Блок высокоинтенсивного фокусированного ультразвука дополнительно содержит систему управления для управления системой приведения в движение. Блок высокоинтенсивного фокусированного ультразвука дополнительно содержит излучатель высокоинтенсивного фокусированного ультразвука. Блок высокоинтенсивного фокусированного ультразвука дополнительно содержит опору для пациента, выполненную для вмещения объекта.
Система приведения в движение является любой системой, которая выполнена с возможностью приведения в движение механизма. В случае винтового привода система приведения в движение будет обеспечивать вращательное движение. Примером варианта осуществления системы приведения в движение будет ультразвуковой или шаговый двигатель. Механизм функционирует с использованием линейного движения, так что для приведения в движение механизма можно также применить поршень, который использует воздух или пневматическую текучую среду. Система управления для управления системой приведения в движение может быть в форме нескольких вариантов осуществления. Система управления может быть просто системой, которая получает команды из другого контроллера или компьютерной системы и, затем система управления просто исполняет упомянутые команды и управляет системой приведения в движение для надлежащего приведения в движение механизма.
Система управления может быть также более сложной, может содержать процессор, который способен выполнять вычисления, необходимые для приведения в движение механизма по предварительно заданному пути между первой точкой и второй точкой. В данном случае система управления может быть процессором, который способен моделировать движение механизма. Вариант осуществления настоящего изобретения данного блока высокоинтенсивного фокусированного ультразвука полезен потому, что механизм может использовать уменьшенный объем пространства. Данное решение обеспечивает более компактный блок высокоинтенсивного фокусированного ультразвука.
В соответствии с другим аспектом изобретения предлагается система магнитно-резонансной визуализации. Система магнитно-резонансной визуализации содержит блок высокоинтенсивного фокусированного ультразвука в соответствии с вариантом осуществления изобретения. Система магнитно-резонансной визуализации дополнительно содержит магнит для формирования магнитного поля для ориентации магнитных спинов ядер. Система магнитно-резонансной визуализации дополнительно содержит радиочастотную систему, содержащую катушку, калиброванную для сбора данных магнитно-резонансной визуализации. Данные магнитно-резонансной визуализации являются по определению в контексте настоящего изобретения данными, которые принимаются катушкой и излучены магнитными спинами ядер. Данные магнитно-резонансной визуализации можно реконструировать в изображения магнитно-резонансной визуализации.
Система магнитно-резонансной визуализации дополнительно содержит катушку градиентов магнитного поля для пространственного кодирования ориентации магнитных спинов ядер. Система магнитно-резонансной визуализации дополнительно содержит источник питания катушки градиентов магнитного поля для подачи тока в катушку градиентов магнитного поля. Система магнитно-резонансной визуализации дополнительно содержит компьютерную систему для построения изображений по данным магнитно-резонансной визуализации и для управления работой системы магнитно-резонансной визуализации. Компьютерная система выполнена с возможностью управления блоком высокоинтенсивного фокусированного ультразвука. Компьютерная система может, фактически, управлять работой блока высокоинтенсивного фокусированного ультразвука или, в альтернативном варианте, компьютерная система может передавать команды в блок высокоинтенсивного фокусированного ультразвука, и компьютерная система или встроенная система обработки данных в блоке высокоинтенсивного фокусированного ультразвука использует упомянутые команды для формирования команд, которые управляют генерацией ультразвука ультразвуковым излучателем, а также управлять приведением в движение механизма.
Компьютерная система по определению в контексте настоящего изобретения является машиной, выполненной с возможностью выполнения машинно-исполняемых команд. Компьютерная система может быть одиночным компьютером, группой компьютеров, сетью компьютеров, встроенной системой, микроконтроллером или другой системой, выполненной с возможностью выполнения машинно-исполняемых компьютерных программ.
В соответствии с другим аспектом изобретения предлагается способ приведения в движение механизм позиционирования высокоинтенсивного фокусированного ультразвука в соответствии с вариантом осуществления изобретения. Способ содержит этап вычисления траектории механизма от первой позиции до второй позиции. Траектория механизма является путем, по которому следует механизм. Траектория может быть просто путем, или траектория может быть также зависящим от времени путем. Часть плана лечения может быть траекторией, по которой следует блок высокоинтенсивного фокусированного ультразвука. Способ дополнительно содержит этап формирования плана приведения в движение с использованием вычисленной траектории. План приведения в движение является представлением приведения в движение механизма, которое необходимо для следования по траектории. План приведения в движение может быть машинно-читаемым планом приведения в движение и содержать команды для контроллера, передаваемые приводным устройствам для перемещения механизма по траектории. План приведения в движение может быть также набором координат, который можно использовать для перемещения механизма по траектории. В случае ручного приведения в движение упомянутый набор координат может быть набором настроек наборных дисков или координат, которые оператор устанавливает по круговой шкале на механизме. При вычислении траектории механизма от первой позиции до второй позиции предполагается, что траектория представляет собой предварительно заданную позицию на позиционирующей плите. Первая позиция и вторая позиция могут быть заданы также в функции геометрии излучателя высокоинтенсивного фокусированного ультразвука, который может быть закреплен на позиционирующей плите. Способ дополнительно содержит этап приведения в движение механизма от первой позиции до второй позиции, с использованием плана приведения в движение. В автоматизированной системе план приведения в движение используется контроллером или компьютерной системой для управления системой приведения в движение. В случае ручной работы оператора оператор вручную приводит в движение механизм с использованием системы ручного управления или с использованием ручек или переключателей, или кнопок.
В соответствии с другим аспектом изобретения предлагается компьютерный программный продукт, содержащий машинно-исполняемые команды для исполнения системой управления. Система управления выполнена с возможностью управления приведением в движение механизма позиционирования высокоинтенсивного фокусированного ультразвука в соответствии с вариантом осуществления изобретения. Компьютерный программный продукт содержит этап вычисления траектории механизма от первой позиции до второй позиции, этап формирования плана приведения в движение, с использованием вычисленной траектории, и этап приведения в движение механизма от первой позиции до второй позиции, с использованием плана приведения в движение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже, исключительно для примера, приведено описание предпочтительных вариантов осуществления со ссылками на чертежи, на которых:
Фиг. 1 - изображение механизма в соответствии с вариантом осуществления изобретения;
Фиг. 2a - изображение механизма в соответствии с дополнительным вариантом осуществления изобретения;
Фиг. 2b - изображение того же варианта осуществления механизма, который показан на фиг. 2a, с другого ракурса;
Фиг. 2c - изображение того же варианта осуществления механизма, который показан на фиг. 2a, с другого ракурса;
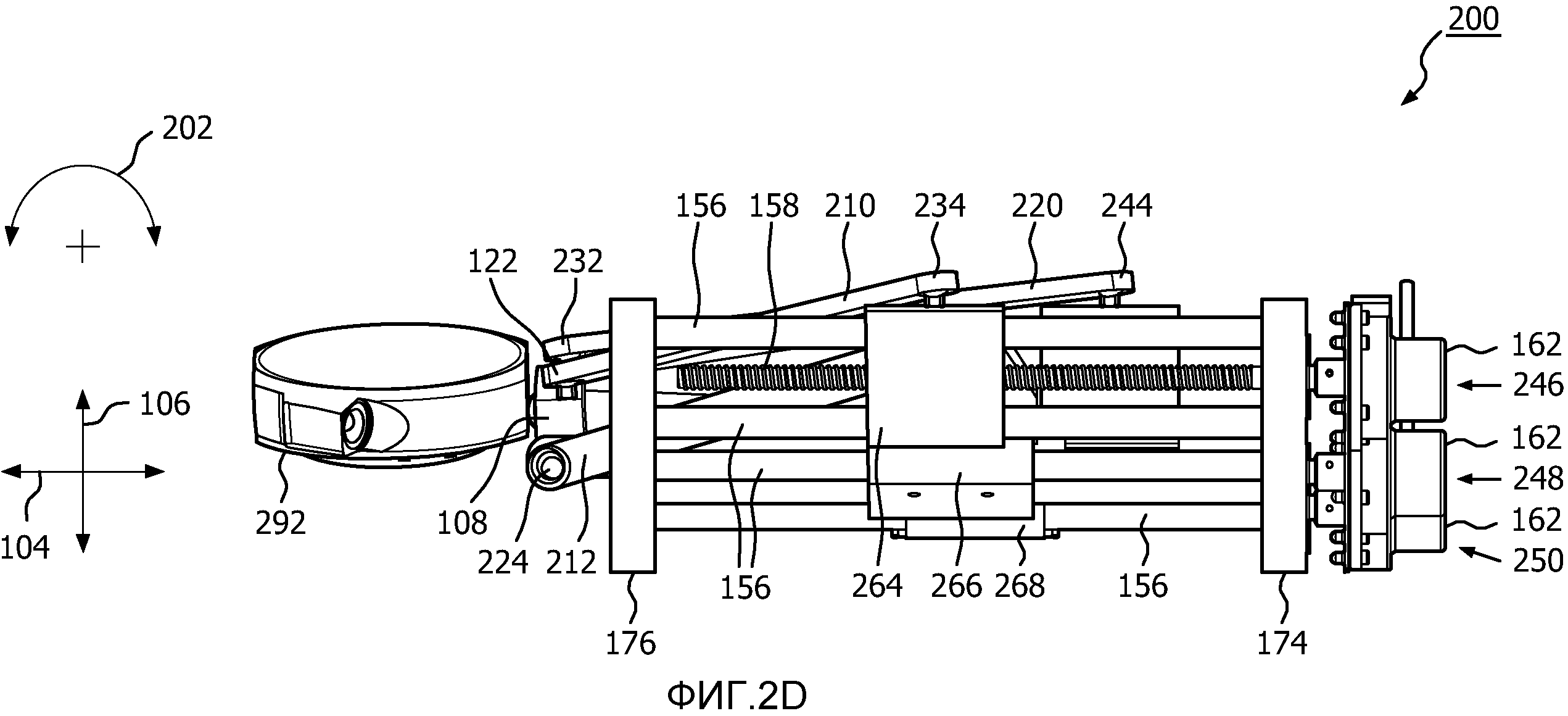
Фиг. 2d - изображение того же варианта осуществления механизма, который показан на фиг. 2a, с другого ракурса;
Фиг. 3 показывает функциональную схему объединенной системы магнитно-резонансной визуализации и высокоинтенсивного фокусированного ультразвука в соответствии с вариантом осуществления изобретения;
Фиг. 4 показывает блок-схему последовательности операций способа в соответствии с вариантом осуществления изобретения;
Фиг. 5 - показывает вид в разрезе винтового привода в соответствии с вариантом осуществления изобретения;
Фиг. 6 - показывает вид сверху механизма, показанного на фиг. 2a-2d, с обозначенными линиями A, B и C сечений;
Фиг. 7a - показывает вид в разрезе механизма, показанного на фиг. 2a-2d, по линии A сечения;
Фиг. 7b - показывает вид в разрезе механизма, показанного на фиг. 2a-2d, по линии B сечения; и
Фиг. 7c - показывает вид в разрезе механизма, показанного на фиг. 2a-2d, по линии C сечения;
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Элементы с одинаковыми численными позициями на данных фигурах либо являются одинаковыми элементами, либо выполняют одну и ту же функцию. Элементы, описание которых приведено ранее, не обязательно поясняются на последующих фигурах, если они имеют эквивалентную функцию.
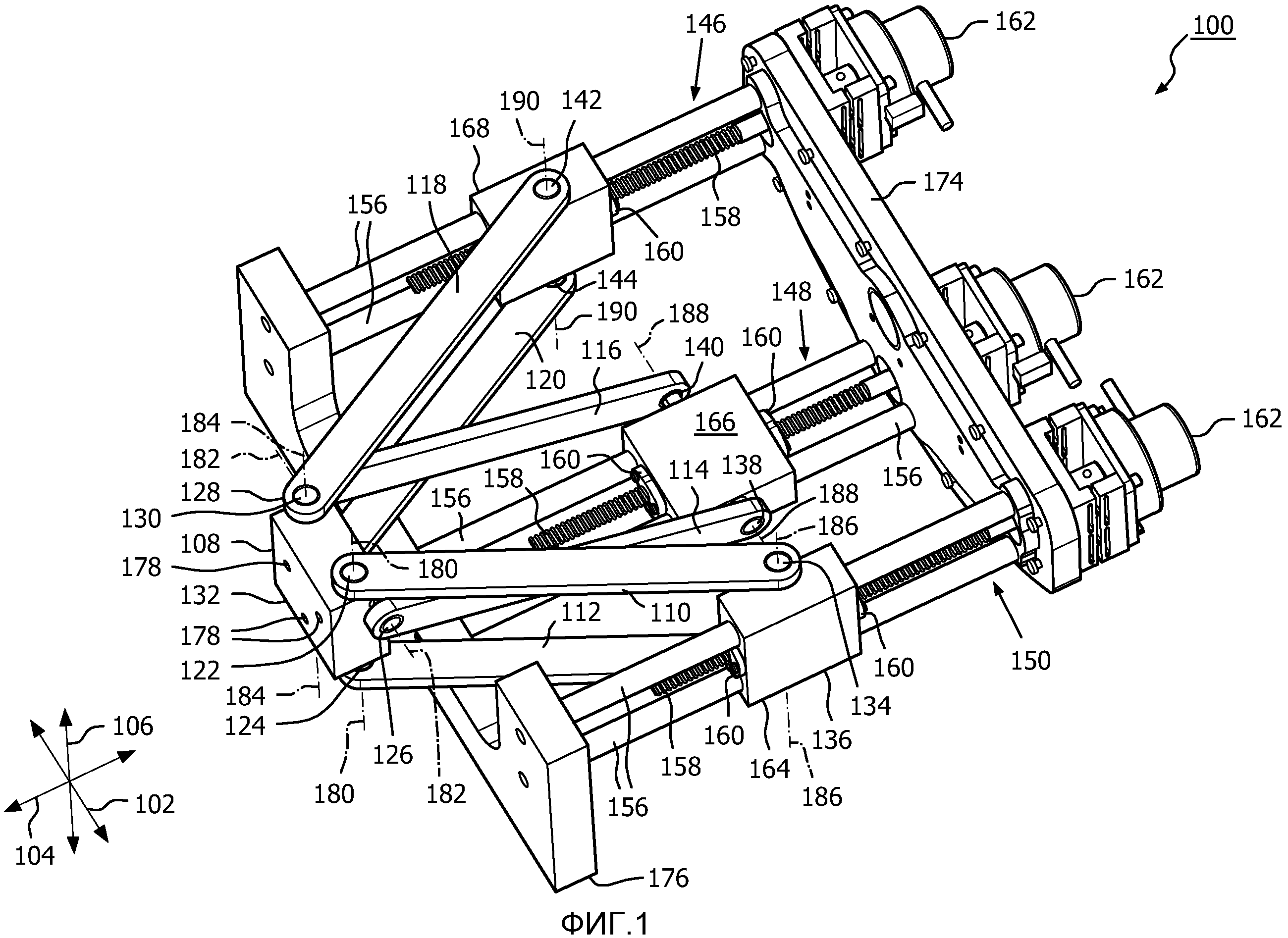
На фиг. 1 представлен механизм 100 в соответствии с вариантом осуществления изобретения. Данный механизм содержит три линейных привода 146, 148, 150. Механизм 100 выполнен с возможностью перемещения позиционирующей плиты 108 по трем ортогональным осям, x-оси 102, y-оси 104 и z-оси 106. Выбор x, y и z для обозначения осей является произвольным выбором. На фиг. 1 показаны первый стержень 110, второй стержень 112, третий стержень 114, четвертый стержень 116, пятый стержень 118 и шестой стержень 120. Первый стержень 110 формирует первое шаровое шарнирное соединение 122 с позиционирующей плитой 108. Второй стержень 112 формирует второе шаровое шарнирное соединение 124 с позиционирующей плитой 108. Третий стержень 114 формирует третье шаровое шарнирное соединение 126 с позиционирующей плитой 108. Четвертый стержень 116 формирует первой шаровое шарнирное соединение 128 с позиционирующей плитой 108. Пятый стержень 118 формирует пятое шаровое шарнирное соединение 130 с позиционирующей плитой 108. Шестой стержень 120 формирует шестое шаровое шарнирное соединение 132 с позиционирующей плитой 108. Первый стержень 110 формирует седьмое шаровое шарнирное соединение 134 с первым приводным блоком 164. Второй стержень 112 формирует восьмое шаровое шарнирное соединение 136 с первым приводным блоком 164. Третий стержень 114 формирует девятое шаровое шарнирное соединение 138 со вторым приводным блоком 166. Четвертый стержень 116 формирует десятое шаровое шарнирное соединение 140 со вторым приводным блоком 166. Пятый стержень 118 формирует одиннадцатое шаровое шарнирное соединение 142 с третьим приводным блоком 168. Шестой стержень 120 формирует двенадцатое шаровое шарнирное соединение 144 с третьим приводным блоком 168.
На фиг. 1 показаны первый линейный привод 146, второй линейный привод 148 и третий линейный привод 150. Каждый линейный привод содержит стержни 156. Стержни служат как направляющие приводных блоков. Первый линейный привод 146 содержит первый приводной блок 164. Второй линейный привод 148 содержит второй приводной блок 166. Третий линейный привод 150 содержит третий приводной блок 168. Стержни 156 предохраняют приводные блоки от поворота или закручивания, когда приводные блоки приводятся в движение стержнем 158 винтового привода. Кроме того, в каждом из приводных блоков 164, 166, 168 установлены резьбовые элементы 160. Резьбовые элементы 160 в данном варианте осуществления содержат резьбу. В другом варианте осуществления возможно использование привода с шариковинтовой передачей. Стержни 158 винтовых приводов приводятся в движение ультразвуковыми двигателями 162. Применение ультразвуковых двигателей допускает высокоточное управление механизмом. Линейные приводы 146, 148, 150 установлены на опоре 174 механизма. В данном случае опора механизма является плитой. Данная плита может быть закреплена болтами в блоке высокоинтенсивного фокусированного ультразвука и может формировать водонепроницаемое уплотнение после закрепления болтами в заданном месте. Стержни 156 установлены на опоре механизма. Противоположно опоре механизма находится плита 176, к которой также закреплены стержни 156. Сочетание плиты 176, опоры 174 механизма и стержней 156 формирует жесткую конструкцию для механизма. На позиционирующей плите 108 можно видеть резьбовые отверстия 178 для установки ультразвукового излучателя. Первое шаровое шарнирное соединение 122 и второе шаровое шарнирное соединение 124 установлены на первой общей оси 180. Второе 124 и третье 126 шаровые шарнирные соединения установлены по второй общей оси 182. Третье шаровое шарнирное соединение 126 и четвертое шаровое шарнирное соединение 128 установлены по третьей общей оси 184. Первая 180, вторая 182 и третья 184 оси проходят через позиционирующую плиту 108. Седьмое шаровое шарнирное соединение 134 и восьмое шаровое шарнирное соединение 136 формируют четвертую общую ось 186. Четвертая общая ось проходит через первый приводной блок 164. Девятое шаровое шарнирное соединение 138 и десятое шаровое шарнирное соединение 140 установлены на пятой общей оси 188. Пятая общая ось 188 проходит через второй приводной блок 166. Одиннадцатое шаровое шарнирное соединение 142 и двенадцатое шаровое шарнирное соединение 144 установлены по шестой общей оси 190. Шестая общая ось 190 проходит через третий приводной блок 168.
В данном варианте осуществления первый 146, второй 148 и третий 150 линейный приводы установлены на опоре 174 механизма таким образом, что данные приводы обеспечивают линейное движение, которое параллельно y-оси. Необязательно, чтобы все три линейных привода были выставлены по так называемой y-оси 104, и не требуется, чтобы данные приводы находились вдоль данной оси. Однако данное расположение целесообразно, так как тогда позиционирующая плита 108 перемещается ортогонально относительно осей x 102, y 104 и z 106. В данном варианте осуществления, первая общая ось 180, третья общая ось 184, четвертая общая ось 186 и шестая общая ось 190 параллельны z-оси 106. Вторая общая ось 182 и пятая общая ось 188 параллельны x-оси 102. И вновь необязательно, чтобы данные оси были выставлены таким образом, однако совмещение осей упомянутым образом в сочетании с совмещением линейных приводов 146, 148, 150 с y-осью 104 позволяет проще вычислять позицию позиционирующей плиты 108, а также обеспечивает, чтобы перемещение позиционирующей плиты 108 было ортогональным x-оси 102, y-оси 104 и z-оси 106.
В процессе работы первый линейный привод 146, второй линейный привод 148 и третий линейный привод 150, обычно, все будут работать одновременно. Причина этого в том, что когда в движение будут приводить какой либо один ультразвуковой двигатель 162, позиционирующая плита 108 будет перемещаться в, по меньшей мере, двух ортогональных направлениях, указанных x-осью 102, y-осью 104 или z-осью 106. Поэтому целесообразно перемещать все три упомянутых привода одновременно, чтобы механизм перемещался по предварительно заданному пути или перемещался по всего одной из осей 102, 104, 106.
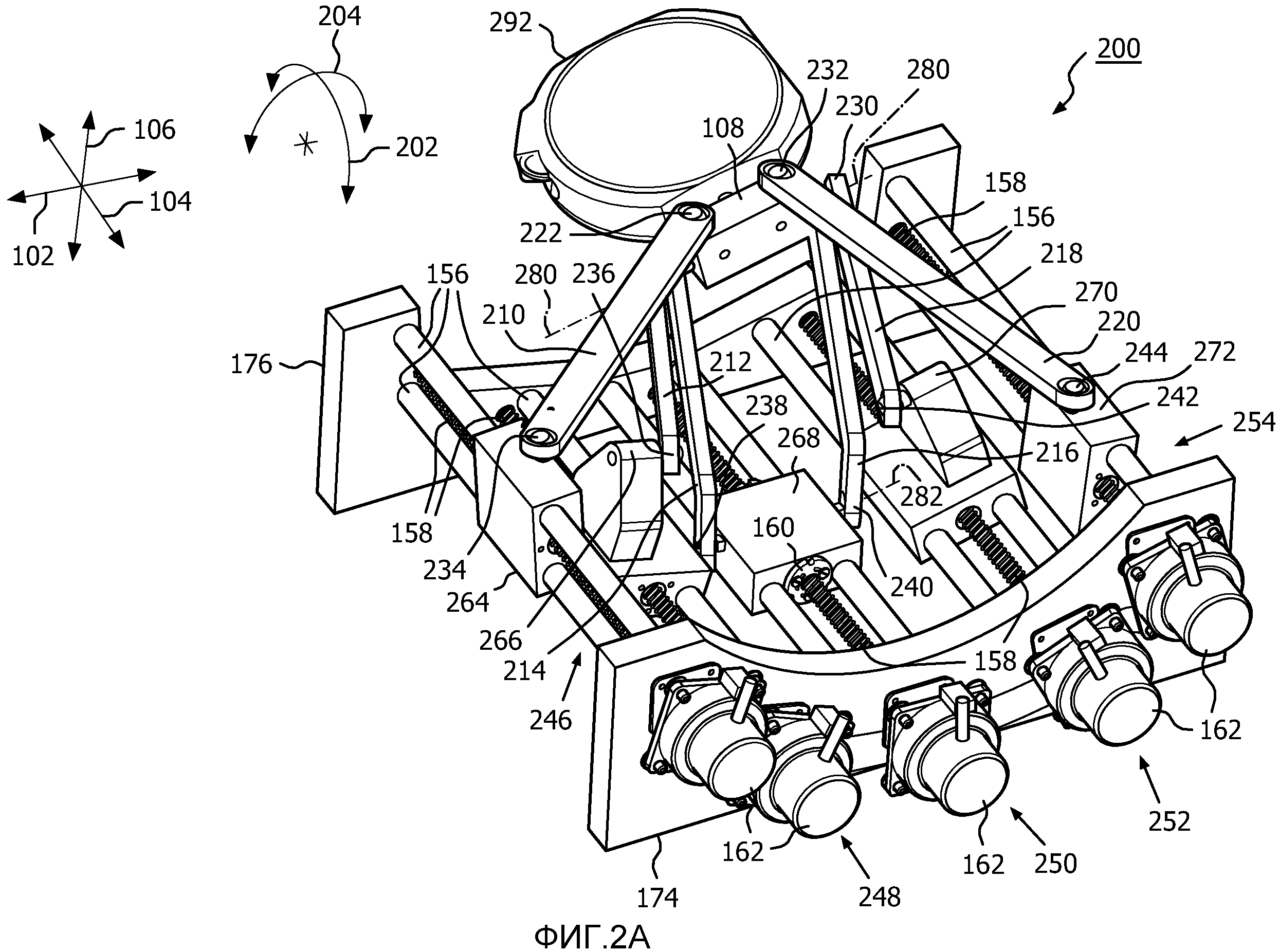
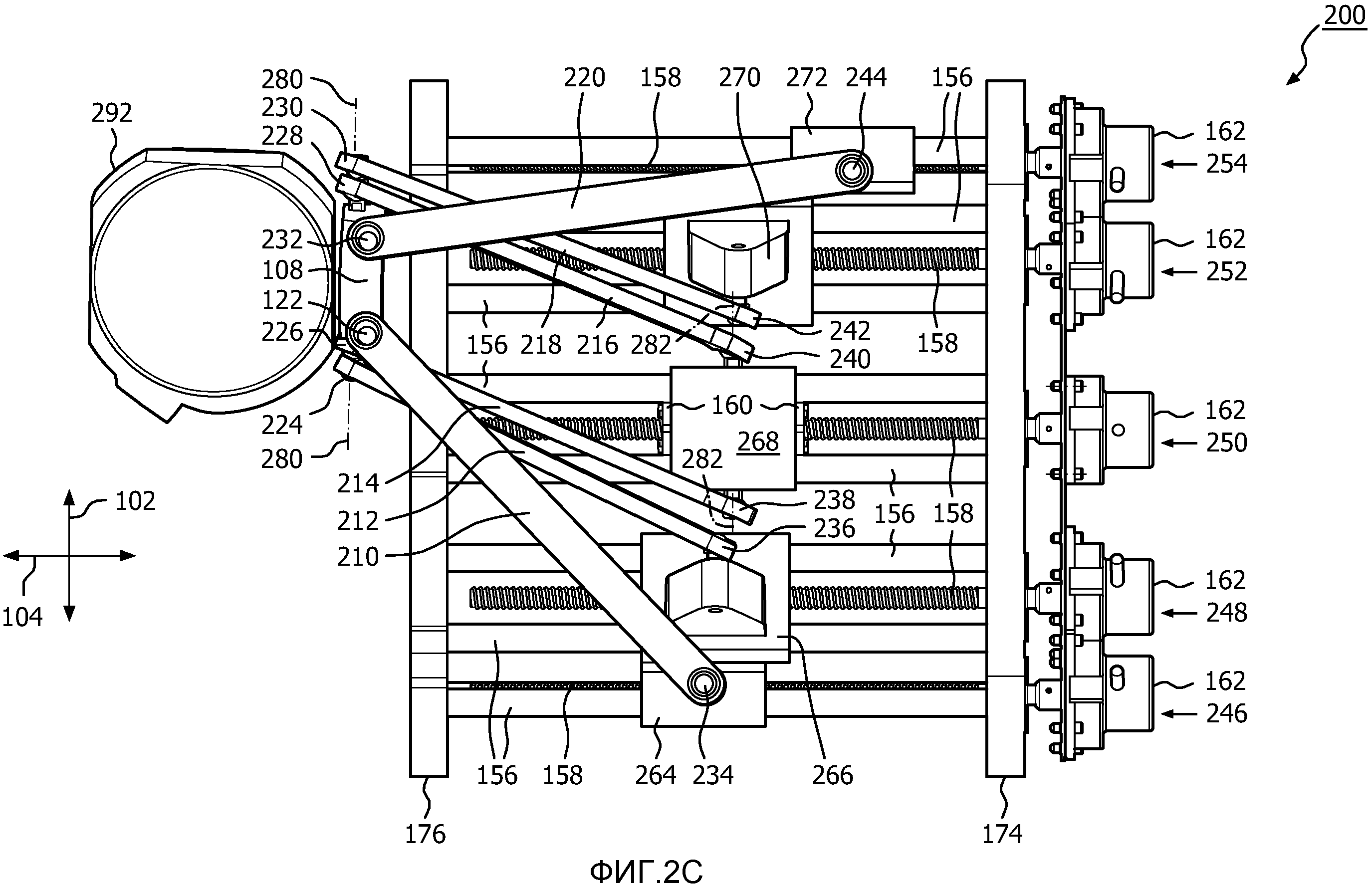
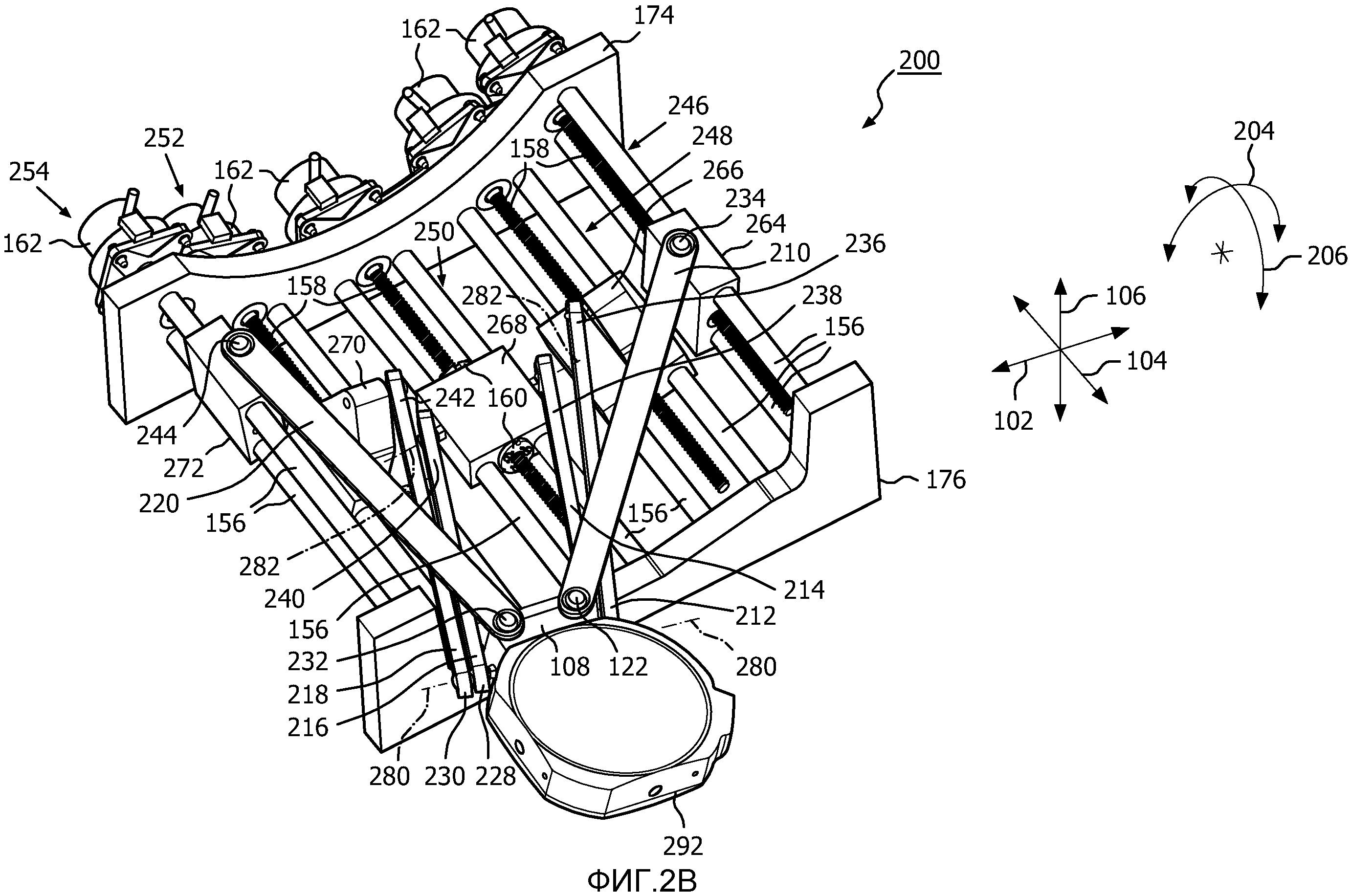
На фиг. 2a, 2b, 2c и 2d представлен один и тот же вариант осуществления механизма 200 в соответствии с изобретением на разных видах. На фиг. 2a и 2b представлены виды в перспективе. На фиг. 2c представлен вид сверху и на фиг. 2d представлен вид сбоку. В приведенном варианте осуществления присутствуют пять линейных приводов 246, 248, 250, 252, 254. Приведенный механизм 200 имеет пять степеней свободы. Пять степеней свободы показаны на данных фигурах с использованием x-оси 102, y-оси 104 и z-оси 106. Приведенный механизм допускает также поворот позиционирующей плиты 108 относительно x-оси 202 и относительно z-оси 204. На упомянутых фигурах показан первый стержень 210, второй стержень 212, третий стержень 214, четвертый стержень 216, пятый стержень 218 и шестой стержень 220. Первый стержень 210 и позиционирующая плита 208 формируют первое шаровое шарнирное соединение 222. Второй стержень 212 и позиционирующая плита 208 формируют второе шаровое шарнирное соединение 224. Третий стержень 214 и позиционирующая плита 208 формируют третье шаровое шарнирное соединение 226. Четвертый стержень 216 и позиционирующая плита 208 формируют четвертое шаровое шарнирное соединение 228. Пятый стержень 218 и позиционирующая плита 208 формируют пятое шаровое шарнирное соединение 230. Шестой стержень 220 и позиционирующая плита 208 формируют шестое шаровое шарнирное соединение 232. В данном варианте имеются первый линейный привод 246, второй линейный привод 248, третий линейный привод 250, четвертый линейный привод 252 и пятый линейный привод 254. Первый линейный привод 246 содержит первый приводной блок 264. Второй линейный привод 248 содержит второй приводной блок 266. Третий линейный привод 250 содержит третий приводной блок 268. Четвертый линейный привод 252 содержит четвертый приводной блок 270. Пятый линейный привод 254 содержит пятый приводной блок 272. Первый стержень 210 и первый приводной блок 264 формируют седьмое шаровое шарнирное соединение. Второй стержень 212 и второй приводной блок 266 формируют восьмое шаровое шарнирное соединение 236. Третий стержень 214 и третий приводной блок 268 формируют девятое шаровое шарнирное соединение 238. Четвертый стержень 216 и четвертый приводной блок 270 формируют десятое шаровое шарнирное соединение 240. Пятый стержень 218 и четвертый приводной блок 270 формируют одиннадцатое шаровое шарнирное соединение 242. Шестой стержень 220 и пятый приводной блок 272 формируют двенадцатое шаровое шарнирное соединение 244.
Каждый из линейных приводов 246, 248, 250, 252, 254 содержит стержни 156, которые направляют приводные блоки 264, 266, 268, 270, 272 и обеспечивают, чтобы данные блоки перемещались линейно. Каждый из линейных приводов 246, 248, 250, 252, 254 содержат также стержни 158 винтового привода, резьбовые элементы 160 и ультразвуковые двигатели 162, как пояснялось также в варианте осуществления, представленного на фиг. 1. На данной фигуре резьбовые элементы 160 показаны только на третьем приводном блоке 268. На практике резьбовые элементы будут также установлены на первом приводном блоке 264, втором приводном блоке 266, четвертом приводном блоке 270 и пятом приводном блоке 272. Линейные приводы 246, 248, 250, 252, 254 закреплены на опоре 174 механизма. Опора 174 механизма и стержни 156 формируют устойчивую несущую конструкцию для механизма 200. Как в случае с вариантом осуществления на фиг. 1, все линейные приводы 246, 248, 250, 252, 254 выставлены по y-оси 104, чтобы все линейные блоки 264, 266, 268, 270, 272 перемещались параллельно y-оси 104.
Первое шаровое шарнирное соединение 222, второе шаровое шарнирное соединение 224, пятое шаровое шарнирное соединение 230 и шестое шаровое шарнирное соединение 232, все установлены так, чтобы упомянутые соединения были выставлены по первой общей оси 280. Первая общая ось 280 проходит через позиционирующую плиту 108. Как девятое шаровое шарнирное соединение 238, так и десятое шаровое шарнирное соединение 240 выставлены вдоль и установлены на второй общей оси 282. Вторая общая ось является x-осью 102. Линейные приводы и вторая общая ось 282 не обязательно должны быть выставлены вышеприведенным образом, но данное расположение целесообразно потому, что обеспечивает механизм, для которого проще вычислять приведение в движение линейных приводов, чтобы перемещать позиционирующую плиту 108 в требуемую позицию. На данной фигуре ультразвуковой излучатель 292 изображен установленным на позиционирующей плите 108.
Как в случае с вариантом осуществления, представленным на фиг. 1, возможно, целесообразно было бы перемещать сочетание из ультразвуковых двигателей 162 одновременно во время приведения в движение механизма 200. Это обусловлено тем, что, когда будет перемещаться какой-либо один ультразвуковой двигатель 162, позиционирующая плита 108 не будет перемещаться в одном ортогональном направлении 102, 104, 106, 202, 204.
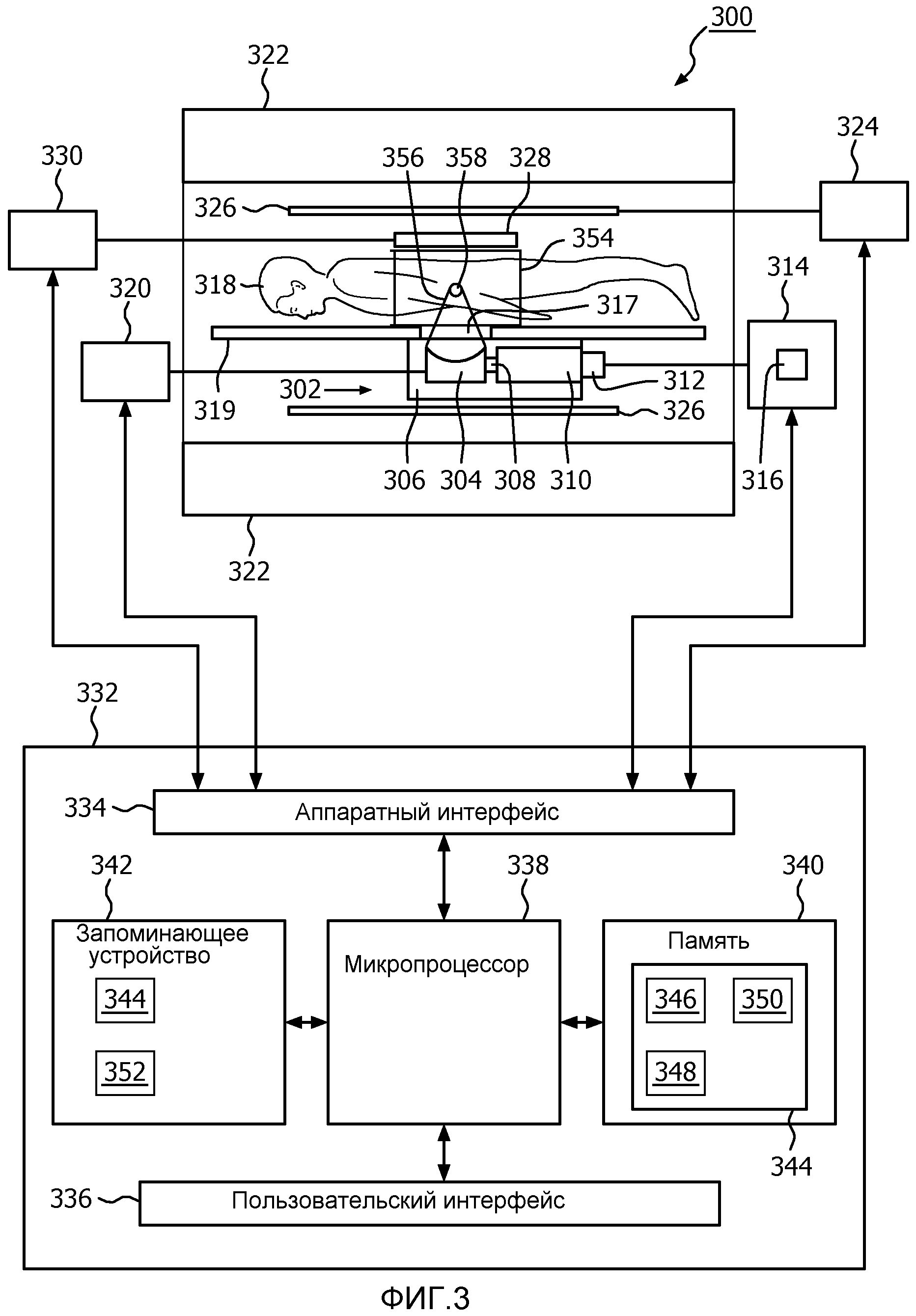
На фиг. 3 представлена система магнитно-резонансной визуализации в соответствии с вариантом осуществления изобретения. Система 300 магнитно-резонансной визуализации содержит систему 302 высокоинтенсивного фокусированного ультразвука в соответствии с вариантом осуществления изобретения. В системе 302 высокоинтенсивного фокусированного ультразвука имеется излучатель 304, который расположен в области 306, заполненной текучей средой. Ультразвуковой излучатель 304 закреплен на позиционирующем блоке 308 механизма 310 в соответствии с вариантом осуществления изобретения. Механизм 310 приводится в движение системой 312 приведения в движение. Система 312 приведения в движение соединена с системой 314 управления, которая выполнена с возможностью управления системой 312 приведения в движение. Компонент системы управления является встроенной системой 316. Встроенная система выполнена с возможностью вычисления надлежащего приведения в движение механизма 310, чтобы перемещать излучатель 304 от первой позиции во вторую позицию. Объект 318 показан на опоре 319 для объекта. В опоре для объекта имеется просвет 317, который дает возможность ультразвуку следовать по пути 356 в объект 318. Просвет 317 может быть выполнен с возможностью вмещения контактной среды для передачи ультразвука, например гелевой прокладки или ультразвукового контактного геля, для надлежащего сопряжения по ультразвуку между системой 302 высокоинтенсивного фокусированного ультразвука и объектом 318. Ультразвук фокусируется на зону 358 ультразвукового разрушения внутри субъекта 318. На схеме не показано ультразвуковое окно, которое позволяет ультразвуку распространяться от блока 302 высокоинтенсивного фокусированного ультразвука через просвет в опоре 317 для объекта и в объект 318.
Система магнитно-резонансной визуализации содержит магнит 322. Магнит формирует магнитное поле для ориентации магнитных спинов ядер. Система 300 магнитно-резонансной визуализации содержит также катушку 326 градиентов магнитного поля, которая служит для формирования градиентов магнитного поля, которые кодируют пространственную ориентацию спинов в ядрах. Катушка градиентов магнитного поля соединена с источником 324 питания градиентных катушек. Система 300 магнитно-резонансной визуализации выполнена с возможностью сбора данных магнитно-резонансной визуализации в зоне 354 визуализации. Зона 358 ультразвукового разрушения находится внутри зоны 354 визуализации и дает системе магнитно-резонансной визуализации возможность нацеливать ультразвуковое разрушение объекта 318. На схеме показана радиочастотная катушка 328, которая допускает сбор данных магнитно-резонансной визуализации внутри зоны 354 визуализации. Радиочастотная катушка 328 соединена с радиочастотным приемопередатчиком 330. Радиочастотная катушка 328 может представлять собой раздельные передающие и приемные катушки, и радиочастотный приемопередатчик 330 также может представлять собой раздельные передатчики и приемники. На схеме показана компьютерная система 332, которая содержит систему 334 питания, которая выполнена с возможностью управления объединенными системами 300 магнитно-резонансной визуализации и 302 высокоинтенсивного фокусированного ультразвука. Аппаратный интерфейс 334 соединен с радиочастотным приемопередатчиком 330, источник питания излучателя соединен с излучателем 304 высокоинтенсивного фокусированного ультразвука. Аппаратный интерфейс 334 соединен также с источником 324 питания градиентной катушки. Аппаратный интерфейс 334 соединен также с системой 314 управления, которая управляет системой 302 высокоинтенсивного фокусированного ультразвука.
В компьютерной системе присутствует микропроцессор 338, который выполнен с возможностью исполнения машинно-исполняемых команд. Микропроцессор соединен с запоминающим устройством 342. Запоминающее устройство 342 предназначено для хранения компьютерно-читаемых данных. Как можно видеть, в запоминающем устройстве 342 находится компьютерный программный продукт 344, выполненный с возможностью управления работой объединенных систем 300 магнитно-резонансной визуализации и 302 высокоинтенсивного фокусированного ультразвука. Запоминающее устройство может также хранить другие компьютерные данные, например данные 352 визуализации. Микропроцессор 338 соединен также с компьютерной памятью 340. В компьютерной памяти находится компьютерный программный продукт 344. Компьютерный программный продукт 344 содержит модуль управления магнитно-резонансной визуализацией, который дает микропроцессору возможность передавать команды в аппаратный интерфейс для управления работой системы 300 магнитно-резонансной визуализации. В данной памяти находится также модуль 348 управления высокоинтенсивным фокусированным ультразвуком, который дает микропроцессору 338 возможность передавать команды управления через аппаратный интерфейс 334 для управления системой 302 высокоинтенсивного фокусированного ультразвука. В данной памяти находится также модуль реконструкции изображения, который дает микропроцессору возможность реконструировать данные магнитно-резонансной визуализации в изображения магнитно-резонансной визуализации. И, наконец, в данной компьютерной системе находится пользовательский интерфейс 336, который соединен с микропроцессором, который дает микропроцессору возможность представлять изображения, и обеспечивает интерфейс, который дает оператору возможность управлять работой компьютерной системы 332 и объединенных системы 300 магнитно-резонансной визуализации и системы 302 высокоинтенсивного фокусированного ультразвука.
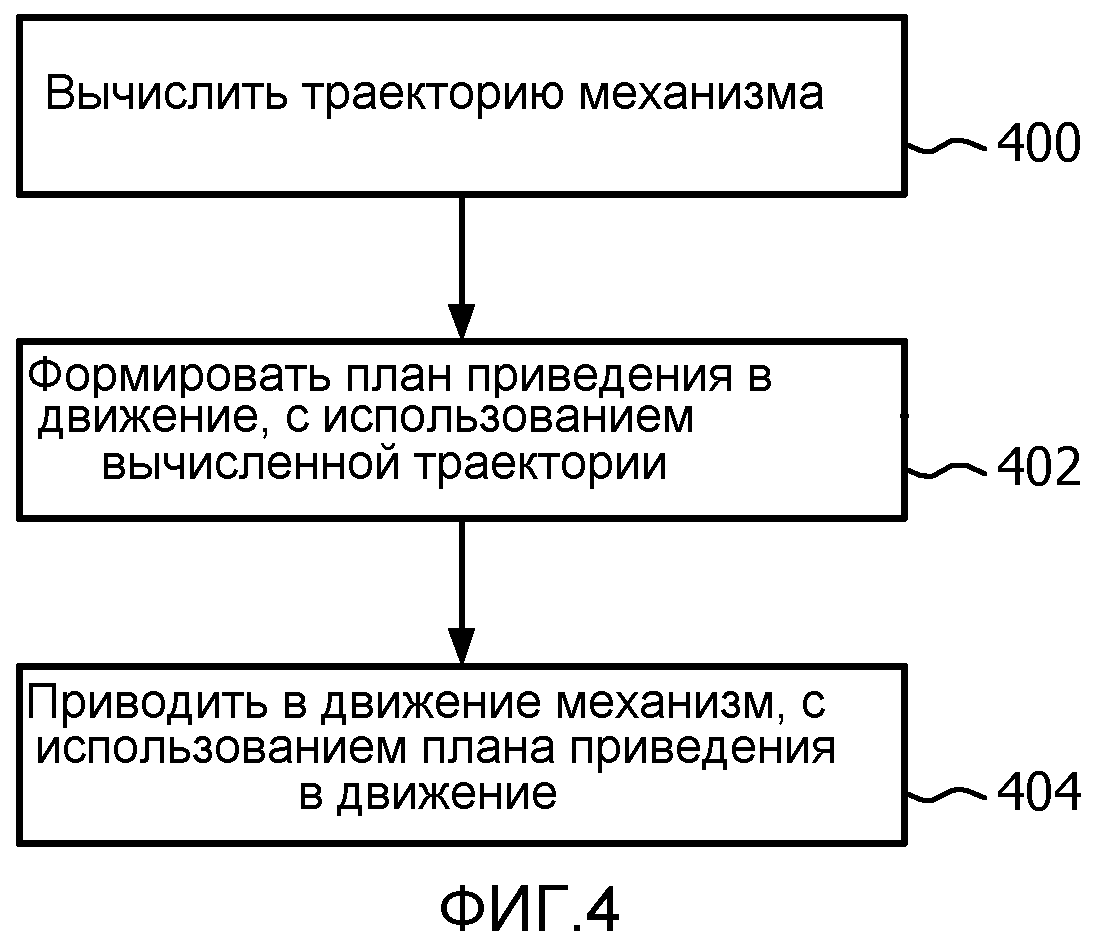
На фиг. 4 представлен вариант осуществления способа в соответствии с изобретением. На этапе 400 вычисляется траектория механизма. Как упоминалось выше, когда линейное приводное устройство приводится в движение, позиционирующая плита будет перемещаться по меньшей мере двум степеням свободы. На этапе 400 вычисляется траектория. На этапе 402 вычисленная траектория служит для формирования плана приведения в движение с использованием вычисленной траектории. Вычисленная траектория служит либо для формирования набора команд, которые оператор может использовать для надлежащего приведения в движение механизма, либо набора машинно-читаемых команд, которые могут быть использованы контроллером для приведения в движение механизма. И, наконец, на этапе 404, механизм приводится в движение от первой позиции во вторую позицию по траектории, с использованием плана приведения в движение.
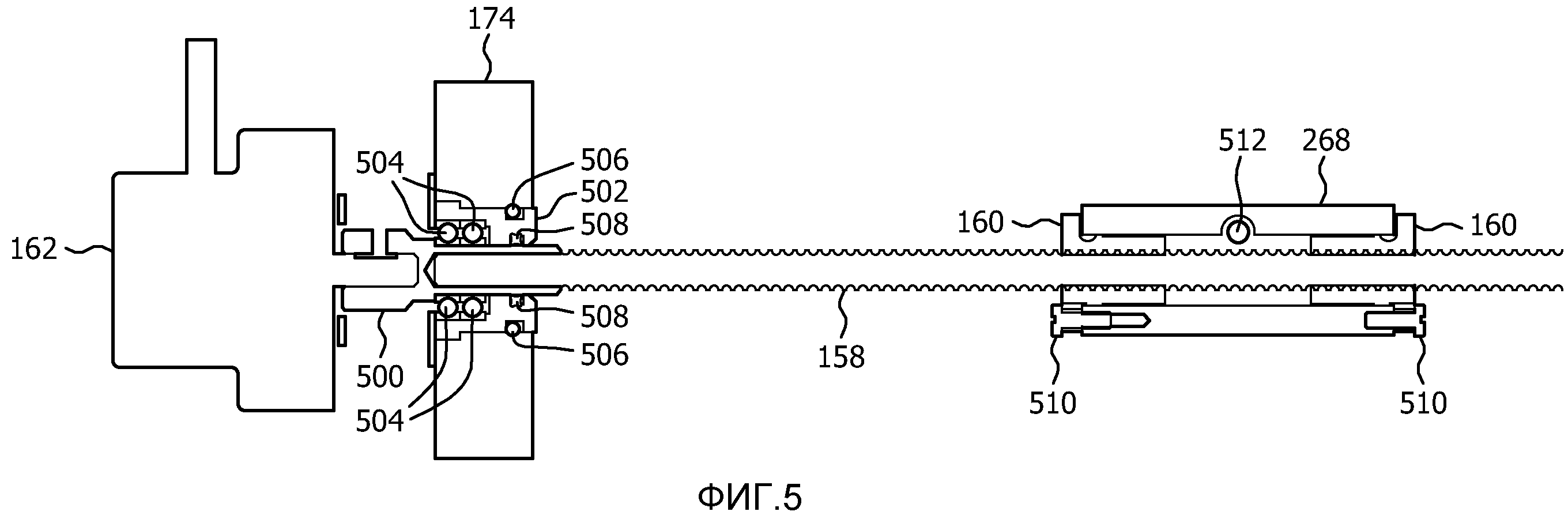
На фиг. 5 представлен вид в разрезе винтового привода в соответствии с вариантом осуществления изобретения. Двигатель 162 соединен с муфтой 500. Муфта 500 прикреплена к стержню 158 винтового привода. Опорой для двигателя 162 и муфты 500 служит вкладыш 502, который соединен с опорой 174 механизма. Для формирования подшипника между вкладышем 502 и муфтой 500 применены шарикоподшипники 504. Муфта 500 и опора 174 механизма уплотнены с использованием статического уплотняющего элемента 506. Уплотняющий элемент 506 в данном варианте осуществления является кольцевым уплотнением, но в других вариантах осуществления уплотняющий элемент может иметь разные формы. Например, уплотняющий элемент 506 может быть сальником. Вкладыш 502 и муфта 500 уплотнены с использованием вращающегося уплотнительного элемента. Вращающийся уплотнительный элемент является таким уплотнительным элементом, как кольцевое уплотнение, которое обеспечивает водонепроницаемое уплотнение или уплотнение, непроницаемое для текучих сред, когда один из элементов, который уплотняют, вращается. В данном случае муфта 500 выполнена с возможностью вращения при приведении в движение механизма.
Третий приводной блок 268 в соответствии с вариантом осуществления показан на фиг. 2a-2d. Резьбовые элементы 160 зафиксированы с каждой стороны третьего приводного блока 268 с использованием винтов 510. В данном варианте осуществления резьбовые элементы 160 являются пластиковыми и предварительно натянутыми. Можно также видеть ось 512. Титановые шаровые опоры, используемые для формирования девятого и десятого шаровых шарнирных соединений, прикреплены к данной оси.
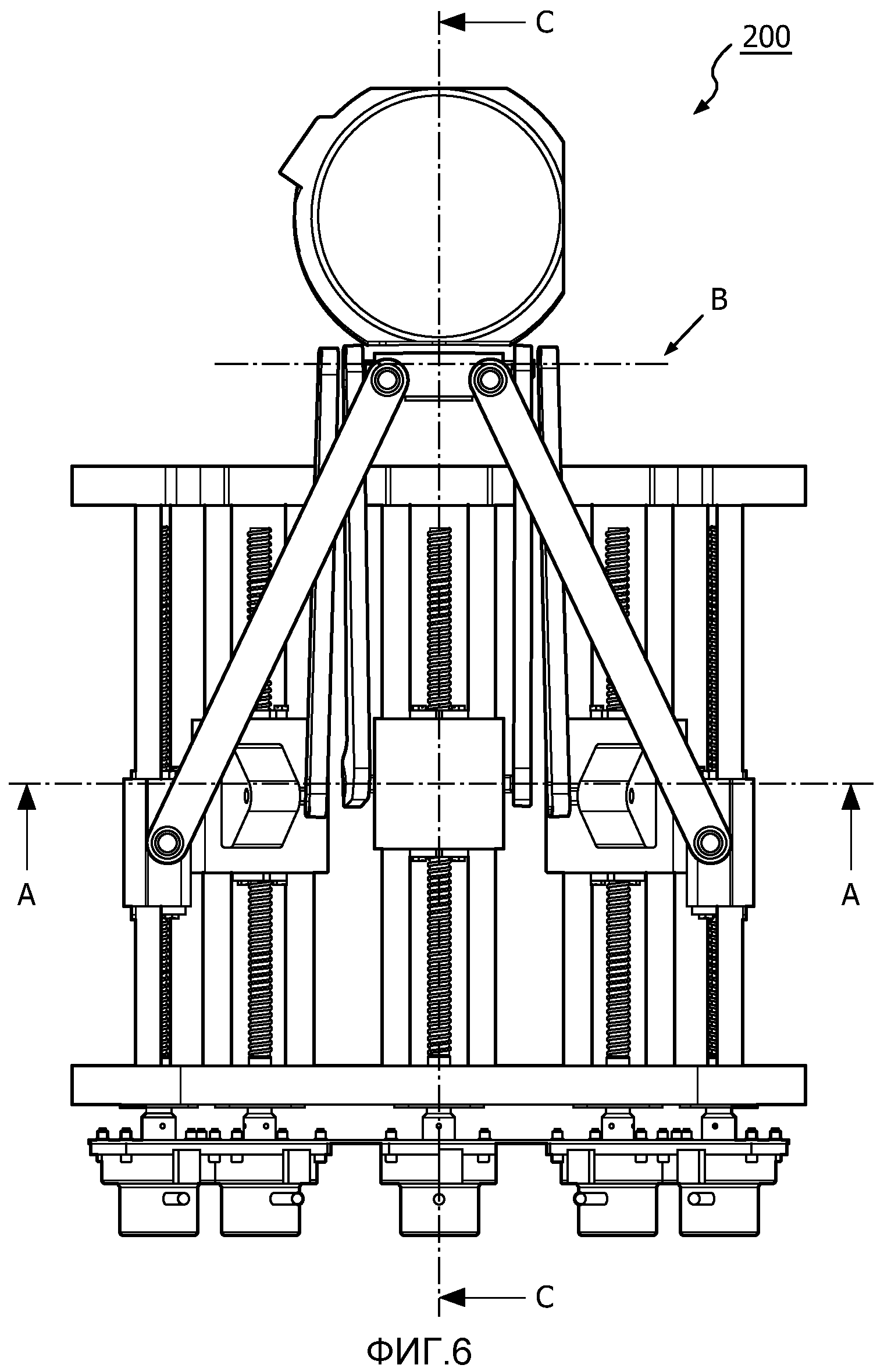
На фиг. 6 представлен вид сверху механизма 200, показанного на фиг. 2a-2d, с обозначенными линиями A, B и C сечений.
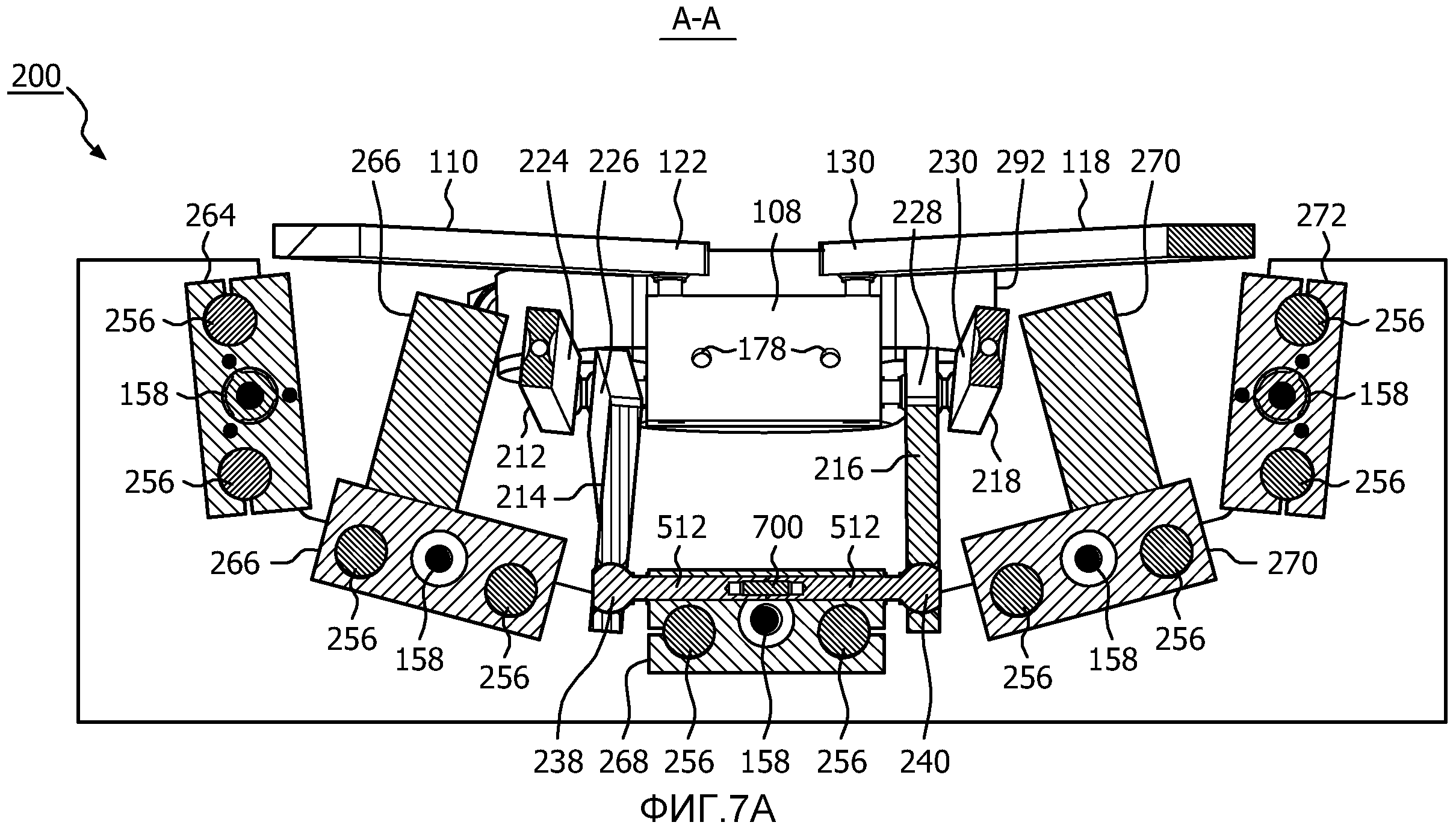
На фиг. 7A представлен вид в разрезе механизма 200, показанного на фиг. 2a-2d, по линии A сечения. На данном виде в разрезе заметны конструктивные детали девятого шарового шарнирного соединения 238 и десятого шарового шарнирного соединения 240. Каждое из упомянутых шаровых шарнирных соединений 238, 240 соединено с осью 512, которые соединены с использованием резьбового стержня 700.
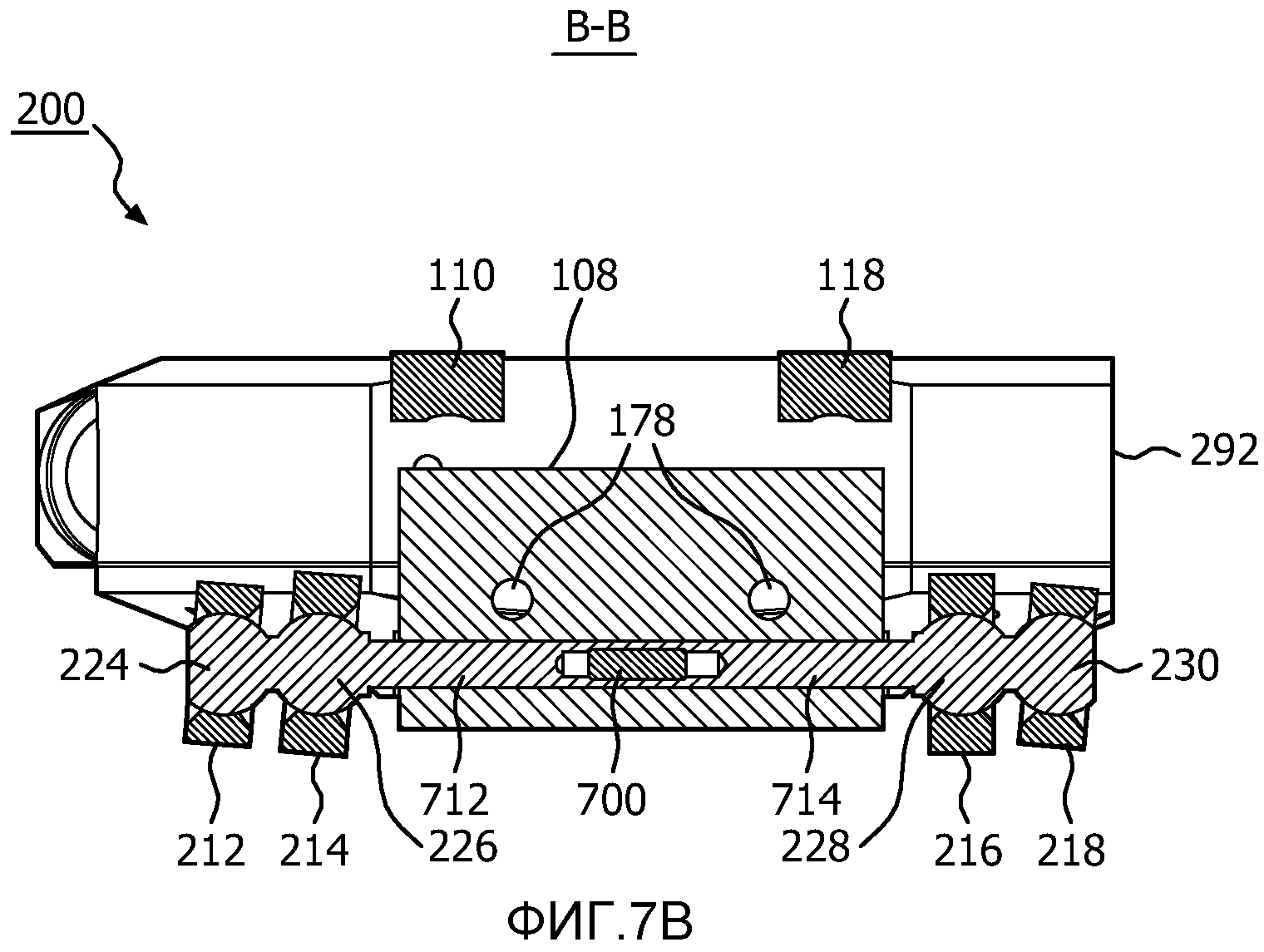
На фиг. 7b представлен вид в разрезе механизма 200, показанного на фиг. 2a-2d, по линии B сечения. Разрез взят по первой общей оси, показанной на фиг. 2a-2d. На фиг. 7b показаны конструктивные детали второго шарового шарнирного соединения 224, третьего шарового шарнирного соединения 226, четвертого шарового шарнирного соединения 228 и пятого шарового шарнирного соединения 230. Второе шаровое шарнирное соединение 224 и третье шаровое шарнирное соединение 226 соединены с первой осью 712. Третье шаровое шарнирное соединение 226 и четвертое шаровое шарнирное соединение 228 соединены со второй осью 714. После этого первая ось 712 и вторая ось соединены с использованием резьбового стержня 700.
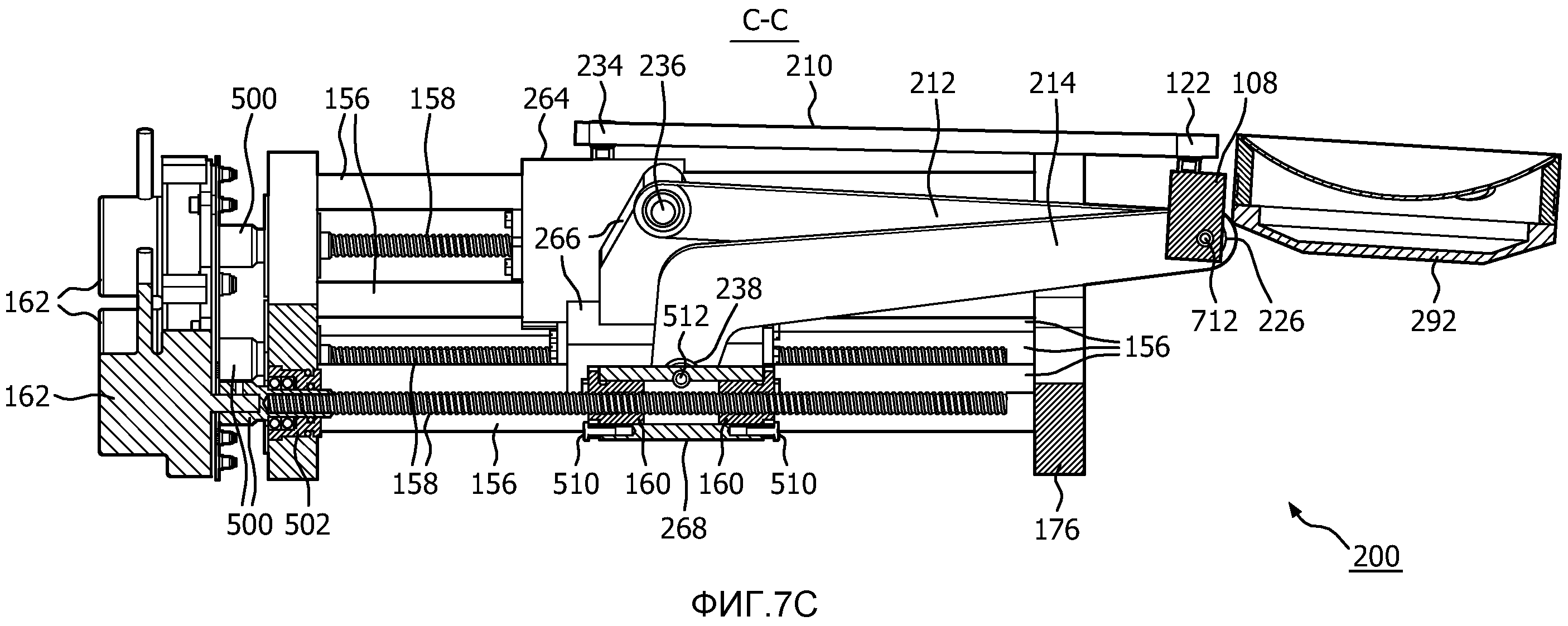
На фиг. 7c представлен вид в разрезе механизма 200, показанного на фиг. 2a-2d, по линии C сечения. На данной фигуре приведен такой же вид в разрезе, как на фиг. 5, кроме показанных дополнительных элементов механизма 200.
СПИСОК ПОЗИЦИЙ
100 Механизм
102 X-ось
104 Y-ось
106 Z-ось
108 Позиционирующая плита
110 Первый стержень
112 Второй стержень
114 Третий стержень
116 Четвертый стержень
118 Пятый стержень
120 Шестой стержень
122 Первое шаровое шарнирное соединение
124 Второе шаровое шарнирное соединение
126 Третье шаровое шарнирное соединение
128 Четвертое шаровое шарнирное соединение
130 Пятое шаровое шарнирное соединение
132 Шестое шаровое шарнирное соединение
134 Седьмое шаровое шарнирное соединение
136 Восьмое шаровое шарнирное соединение
138 Девятое шаровое шарнирное соединение
140 Десятое шаровое шарнирное соединение
142 Одиннадцатое шаровое шарнирное соединение
144 Двенадцатое шаровое шарнирное соединение
146 Первый линейный привод
148 Второй линейный привод
150 Третий линейный привод
156 Стержень
158 Стержень винтового привода
160 Резьбовой элемент
162 Ультразвуковой двигатель
164 Первый приводной блок
166 Второй приводной блок
168 Третий приводной блок
174 Опора механизма
176 Плита
178 Резьбовые отверстия для установки ультразвукового излучателя
180 Первая общая ось
182 Вторая общая ось
184 Третья общая ось
186 Четвертая общая ось
188 Пятая общая ось
190 Шестая общая ось
200 Механизм
202 Поворот вокруг x-оси
204 Поворот вокруг y-оси
208 Позиционирующая плита
210 Первый стержень
212 Второй стержень
214 Третий стержень
216 Четвертый стержень
218 Пятый стержень
220 Шестой стержень
222 Первое шаровое шарнирное соединение
224 Второе шаровое шарнирное соединение
226 Третье шаровое шарнирное соединение
228 Четвертое шаровое шарнирное соединение
230 Пятое шаровое шарнирное соединение
232 Шестое шаровое шарнирное соединение
234 Седьмое шаровое шарнирное соединение
236 Восьмое шаровое шарнирное соединение
238 Девятое шаровое шарнирное соединение
240 Десятое шаровое шарнирное соединение
242 Одиннадцатое шаровое шарнирное соединение
244 Двенадцатое шаровое шарнирное соединение
246 Первый линейный привод
248 Второй линейный привод
250 Третий линейный привод
252 Четвертый линейный привод
254 Пятый линейный привод
264 Первый приводной блок
266 Второй приводной блок
268 Третий приводной блок
270 Четвертый приводной блок
272 Пятый приводной блок
280 Первая общая ось
282 Вторая общая ось
292 Ультразвуковой излучатель
300 Система магнитно-резонансной визуализации
302 Система высокоинтенсивного фокусированного ультразвука
304 Излучатель
306 Область, заполненная текучей средой
308 Позиционирующий блок
310 Механизм
312 Система приведения в движение
314 Система управления
316 Встроенная система
317 Просвет в опоре для объекта
318 Объект
319 Опора для объекта
320 Источник питания излучателя
322 Магнит
324 Источник питания градиентных катушек
326 Катушка градиентов магнитного поля
328 Катушка
330 Радиочастотный приемопередатчик
332 Компьютерная система
334 Аппаратный интерфейс
336 Пользовательский интерфейс
338 Микропроцессор
340 Память
342 Запоминающее устройство
344 Компьютерный программный продукт
346 Модуль управления магнитно-резонансной визуализацией
348 Модуль управления высокоинтенсивным фокусированным ультразвуком
350 Модуль реконструкции изображения
352 Данные визуализации
354 Зона визуализации
356 Путь распространения ультразвука
358 Зона ультразвукового разрушения
500 Муфта
502 Вкладыш
504 Шарикоподшипник
506 Статический уплотняющий элемент
508 Вращающийся уплотняющий элемент
510 Винт
512 Ось
700 Резьбовой стержень
712 Первая ось
714 Вторая ось
A Линия сечения A
B Линия сечения B
C Линия сечения C
Подставка для поддержания чашки и кофе-машина или подобное ей устройство, содержащее упомянутую подставку
Способ определения, по меньшей мере, одного приемлемого параметра для процесса приготовления напитка
Электронный планировщик с функцией управления весом
Режущий элемент, электрическая бритва, оснащенная режущим элементом, и способ получения такого элемента
Компактная оптическая система и линзы для формирования равномерного коллимированного света
Одночастотная сеть
Система и способ для управления освещением
Способ, система и пользовательский интерфейс для автоматического создания атмосферы, в частности освещенной атмосферы, на основании ввода ключевого слова
Определение пространственного распределения отдачи сцинтиллятора
Способ и устройство для регистрирования сосудистой структуры во время медицинского воздействия
Устройство и способ для получения напитка
Подставка для поддержания чашки и кофе-машина или подобное ей устройство, содержащее упомянутую подставку
Освещающее устройство
Цифровая обработка импульсов в схемах счета мультиспектральных фотонов
Уменьшение эффектов захвата в сцинтилляторе за счет применения вторичного излучения
Пространственная мышь - устройство связи
Органическое светоизлучающее устройство с регулируемой инжекцией носителей заряда
Способ определения, по меньшей мере, одного приемлемого параметра для процесса приготовления напитка
Устройство для перфорирования порционных капсул
Светоизлучающий ворсовый ковер

