Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРИХОДА ШИРОКИХ АТМОСФЕРНЫХ ЛИВНЕЙ
Вид РИД
Изобретение
Изобретение относится к области регистрации широких атмосферных ливней (ШАЛ) на поверхности Земли и может быть использовано для исследования первичных космических лучей.
Широкие атмосферные ливни, формирующиеся в результате развития ядерно-каскадного процесса в атмосфере при взаимодействии частиц первичных космических лучей (ПКЛ) с энергией более 1014 эВ с атомами воздуха, являются единственным источником информации о первичных космических лучах высоких и сверхвысоких энергий. Площадь ШАЛ на уровне наблюдения в зависимости от энергии первичной частицы может составлять от сотен квадратных метров до десятков квадратных километров. Поэтому для регистрации ШАЛ обычно используются установки, состоящие из множества детекторов, распределенных на некоторой площади, определяемой статистикой регистрации ШАЛ, генерируемых ПКЛ в изучаемой области энергий. Одной из важнейших характеристик регистрируемых ШАЛ является направление их прихода, однозначно связанное с направлением прихода первичных частиц.
Известно устройство для регистрации ШАЛ, в котором атмосферные ливни регистрируются по электромагнитному излучению ШАЛ (черенковскому или флуоресцентному). Устройство содержит систему оптических элементов детектора с определенными временными характеристиками и топологией, подключенную к аналитическому аппаратурному тракту. При этом геометрия сработавших оптических элементов используется для определения плоскости, в которой лежит ось атмосферного ливня и центр детектора. Каждый оптический элемент выделяет направление  от центра детектора до точки на небесной сфере. Таким образом, нормаль
от центра детектора до точки на небесной сфере. Таким образом, нормаль  к плоскости определяется минимизацией величины
к плоскости определяется минимизацией величины  , амплитуда сигнала оптического элемента i используется в качестве статистического веса wi. Направление оси атмосферного ливня внутри плоскости определяется по временам срабатывания оптических элементов. Ожидаемое время ti,exp прихода света от оси ливня на оптический элемент i задается формулой:
, амплитуда сигнала оптического элемента i используется в качестве статистического веса wi. Направление оси атмосферного ливня внутри плоскости определяется по временам срабатывания оптических элементов. Ожидаемое время ti,exp прихода света от оси ливня на оптический элемент i задается формулой:
 ,
,
где χi - направление (угол) оптического элемента, спроецированное на плоскость, в которой лежит ось атмосферного ливня и центр детектора, χ0 - угол между осью атмосферного ливня и вектором, направленным из точки пересечения оси ливня с поверхностью Земли в центр детектора, Rp - расстояние наибольшего сближения ливня с детектором, t0 - время, когда фронт ливня достигает точки наибольшего сближения с детектором. Наилучшая аппроксимация трех параметров χ0, Rp и t0 достигается минимизацией соотношения  , где ti,meas - время срабатывания оптического элемента i. Направление ливня определяется по аппроксимированным значениям
и χ0 (P. Privitera for the Pierre Auger Collaboration, The Angular Reconstruction and Angular Resolution of Air Showers Detected at the Auger Observatory, Proceedings of the 28th International Cosmic Ray Conference, Tsukuba, Japan, 2003, p.357).
, где ti,meas - время срабатывания оптического элемента i. Направление ливня определяется по аппроксимированным значениям
и χ0 (P. Privitera for the Pierre Auger Collaboration, The Angular Reconstruction and Angular Resolution of Air Showers Detected at the Auger Observatory, Proceedings of the 28th International Cosmic Ray Conference, Tsukuba, Japan, 2003, p.357).
Недостатком данного способа является то, что детекторы имеют фиксированный ограниченный телесный угол, в котором наблюдаются ШАЛ, и не могут регистрировать события со всей небесной полусферы в один и тот же период времени.
Наиболее близкой к заявленному решению является установка EAS-TOP, содержащая множество пространственно распределенных в одной плоскости детекторов космических лучей, соединенных с входом блока сбора данных. Выход блока сбора данных соединен с входом блока временного анализа, выход последнего - с входом блока определения вектора направления ШАЛ.
Установка обеспечивает определение направления прихода широкого атмосферного ливня по временам срабатывания отдельных детекторов ti установки при его регистрации. При этом известны координаты всех детекторов xi и yi. Разница времен Δti между временем срабатывания ti детектора i и предполагаемым временем срабатывания для ШАЛ с заданной геометрией может быть записана следующим образом:
 ,
,
где T0, u=sinθ·cosφ и v=sinθ·sinφ - время прихода ШАЛ на уровень наблюдения и соответствующие направляющие косинусы фронта ШАЛ и с - скорость света. Положение оси ШАЛ на уровне наблюдения, заданное как xcore и ycore, определяется центром масс сработавших детекторов, где в качестве статистических весов используются амплитуды сигналов или квадратные корни этих амплитуд. Параметры Т0, θ и φ получаются из минимизации величины  , где
, где  - неопределенность в определении времени срабатывания ti (M. Aglietta, Multicomponent Extensive Air Showers observations at EAS-TOP, Nuclear Physics В (Proc. Suppl.), v. 54B, 1997, pp.263-270; N).
- неопределенность в определении времени срабатывания ti (M. Aglietta, Multicomponent Extensive Air Showers observations at EAS-TOP, Nuclear Physics В (Proc. Suppl.), v. 54B, 1997, pp.263-270; N).
Недостатком данной системы является требование равномерного, по существу, распределения детекторов установки в одной плоскости на большой площади, что ставит возможность развертывания системы в зависимость от рельефа местности и, соответственно, ограничивает возможности ее применения.
Технический результат изобретения заключается в возможности применения устройства для определения направления прихода широких атмосферных ливней вне зависимости от рельефа и иных особенностей местности за счет неравномерного распределения детекторов устройства в пространстве, при котором детекторы могут быть размещены в любых точках трехмерного пространства и составлять любую геометрическую форму.
Указанный технический результат достигается тем, что устройство для определения направления прихода широких атмосферных ливней содержит множество пространственно разнесенных детекторов космических лучей, при этом детекторы входят в состав кластеров. Выходы кластеров соединены через общую шину со входами блока сбора данных с кластеров, выход блока сбора данных с кластеров соединен с входом блока определения вектора направления ШАЛ, который оснащен блоком хранения локальных векторов, соединенным с ним общей шиной. Выходы блока определения вектора направления ШАЛ соединены с входами блока памяти и блока визуализации данных, соединенными общей шиной. Кластер включает в себя не менее трех детекторов, выходы которых соединены со входами блока временного анализа, выходы блока временного анализа соединены со входами блока отбора событий, выходы блока отбора событий соединены со входами блока определения локального направления, выходы блока определения локального направления соединены со входами блока хранения и передачи данных.
В частном случае исполнения кластеры и входящие в них детекторы размещены на поверхности Земли, в точках с различными координатами (х, y, z), а внутри кластера детекторы расположены на расстоянии (3-80) м друг от друга. Специалисту должно быть ясно, что для регистрации космических лучей понятие поверхности Земли включает в себя и приповерхностный слой атмосферы в пределах высоты аппаратурного размещения.
Предпочтительно в качестве детекторов космических лучей используются сцинтилляционные счетчики. При этом в качестве регистрирующего элемента счетчика используется сцинтилляционная пластина площадью не менее 0.25 м2 и толщиной не менее 3 см, а в качестве фотоприемника счетчика используется фотоэлектронный умножитель.
В частном случае исполнения в качестве блока временного анализа используется сканирующий аналого-цифровой преобразователь.
В другом частном случае исполнения блок определения вектора направления ШАЛ реализован на базе ЭВМ.
Суть изобретения проиллюстрирована следующими схемами:
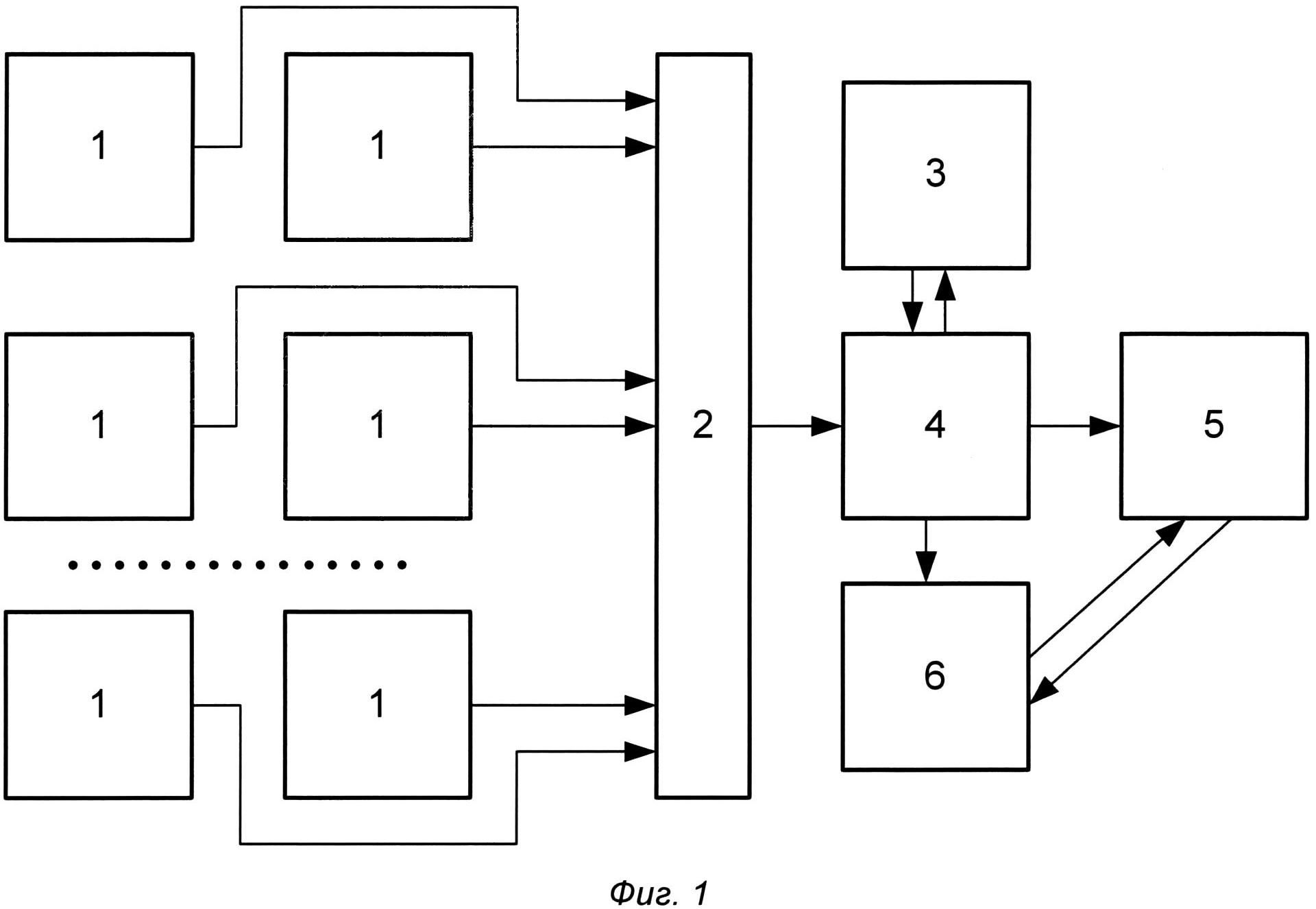
На фиг.1 представлена общая схема устройства для определения направления прихода ШАЛ.
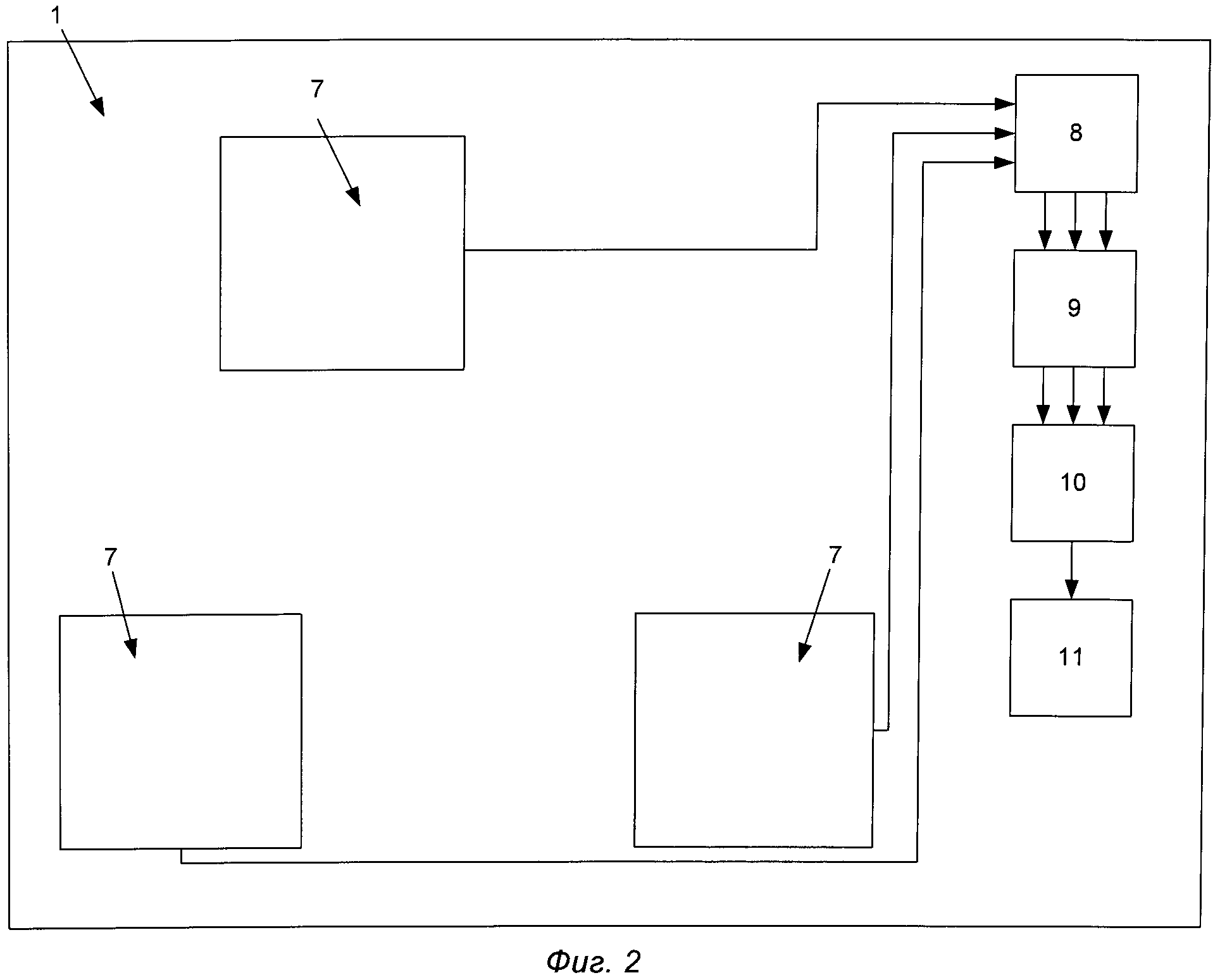
На фиг.2 приведена схема кластера устройства для регистрации ШАЛ.
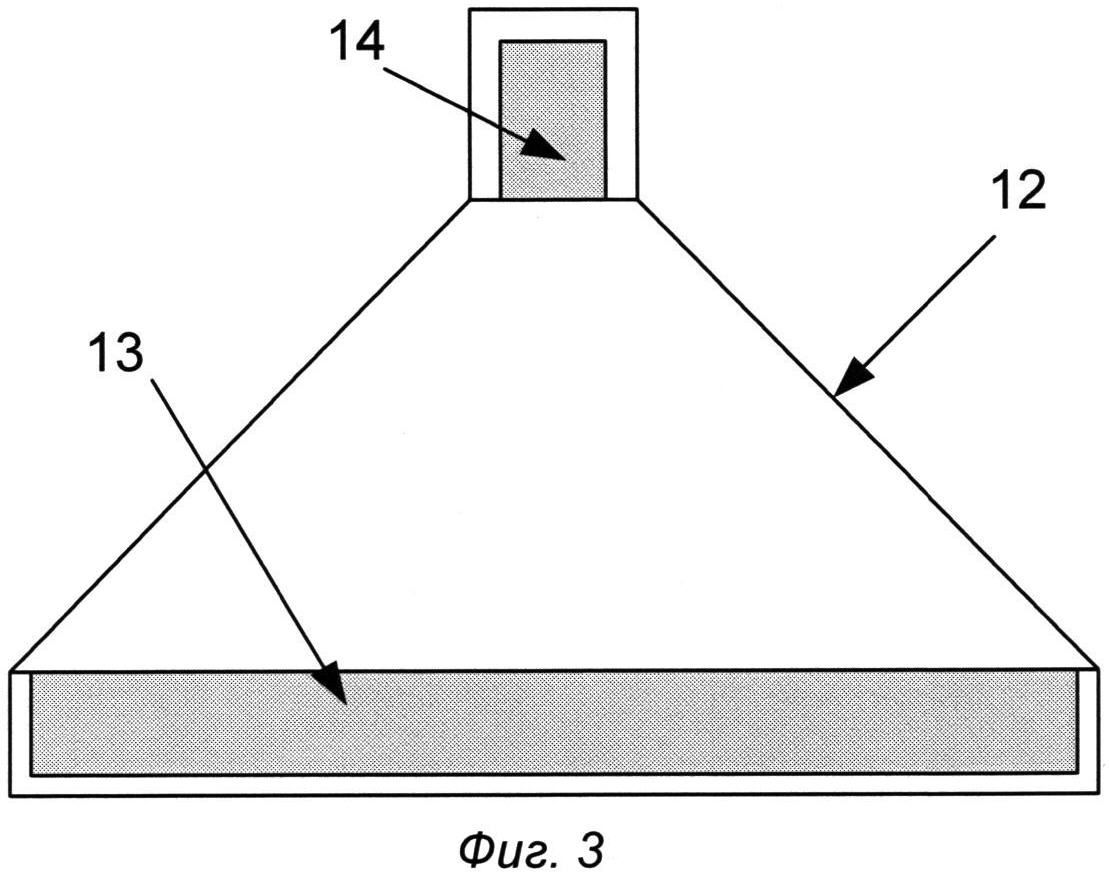
На фиг.3 показана принципиальная схема сцинтилляционного счетчика, предпочтительного для реализации способа определения направления прихода широких атмосферных ливней.
В устройстве для определения направления широких атмосферных ливней используются кластеры детекторов космических лучей. Под кластером в рамках контекста настоящей заявки понимается группа детекторов сбора и первичной обработки данных (блок временного анализа, блок отбора событий, блок определения локального направления, блок хранения и передачи данных). Каждый кластер включает в себя не менее трех детекторов частиц космических лучей, при этом детекторы частиц космических лучей внутри кластера могут быть расположены произвольно в пространстве по всем трем координатам (х, y, z), при этом расстояние между парой соседних детекторов должно лежать в диапазоне 3-80 м. Нижняя граница диапазона определяется характерной толщиной фронта ШАЛ в его центре, которая составляет 3 м. Верхняя граница определяется мольеровским радиусом ШАЛ, при котором плотность частиц ливня уменьшается в е раз по отношению к плотности частиц вблизи центральной части. Для ливней больших энергий мольеровский радиус составляет 80 м. Для восстановления плоскости фронта широкого атмосферного ливня необходимо наличие как минимум трех точек в пространстве, которые могут быть получены при срабатывании не менее трех детекторов, входящих в состав одного кластера устройства. Кластеры могут быть расположены на различных высотах относительно друг друга.
Направление прихода ШАЛ (зенитный и азимутальный углы θ и φ) находится по относительным временам срабатывания детекторов, используя приближение плоского фронта атмосферного ливня. Уравнение плоскости фронта записывается в виде:
ax+bx+cz=d,
где а, b, с - координаты нормального вектора плоскости (вектора локального направления), связанные соотношением:
a 2+b2+с2=1.
Тогда расстояние от i-го детектора с координатами (xi; yi; zi) до плоскости ливня есть:
δi=axi+bxi+czi+d
с δi=ti×0.3 [м], где ti - относительное время срабатывания i-го детектора в наносекундах. Используя метод наименьших квадратов [Д. Худсон, Статистика для физиков: лекции по теории вероятностей и элементарной статистике - 2-е изд., пер. с англ. - Москва: МИР, 1970, стр.146], ищется минимум функционала
 ,
,
где n - число сработавших детекторов кластера, по параметрам а, b, с и d. Определив значения этих параметров (координат вектора локального направления), из решения получившейся системы уравнений вычисляются зенитный и азимутальный углы θ и φ.
 .
.
Определение вектора локального направления проводится для каждого сработавшего кластера. Далее проводится анализ и сортировка полученных данных о векторах локальных направлений, в результате чего осуществляется усреднение векторов локальных направлений и определение вектора направления прихода широкого атмосферного ливня. Анализ локальных векторов и определение направления зарегистрированного ШАЛ могут быть осуществлены, например, методом максимального правдоподобия (Д. Худсон, Статистика для физиков: лекции по теории вероятностей и элементарной статистике - 2-е изд., пер. с англ. - Москва: МИР, 1970, стр.191).
На фиг.1 представлена общая схема устройства кластерного типа для определения направления прихода ШАЛ. Установка состоит из N кластеров (1). Частицы космических лучей от широких атмосферных ливней регистрируются кластерами установки (схема кластера приведена на фиг.2). Количество кластеров, которые зарегистрируют частицы, зависит от энергии частиц и размеров ШАЛ. Информация со всех кластеров поступает на блок сбора данных с кластеров (2). Выход блока (2) соединен с входом блока определения вектора направления ШАЛ (4). Блок (4) оснащен блоком хранения локальных векторов (3). В случае необходимости в блок (4) можно загрузить данные из блока (3), соединенного с ним общей шиной. Хранение полученных данных о направлении ШАЛ осуществляют с помощью блока памяти (5), а их визуализацию - с помощью блока визуализации (6). Система позволяет визуализировать данные в online режиме непосредственно с блока (4) и загружать необходимые данные ШАЛ с блока памяти (5). Кластеры (1) могут передавать данные по сети, с помощью стандартов Ethernet или WiFi по протоколу TCP/IP. Выбор стандарта передачи осуществляется в зависимости от геометрии расположения кластеров. Блок (4) может быть реализован на базе ЭВМ. В качестве блоков (3) и (5) могут быть использованы как жесткие диски, так и внешнее сетевое хранилище. Блок визуализации (6) может быть реализован на базе монитора или принтера, на который выводится информация о полученных векторах направлений ШАЛ.
На фиг.2. представлена схема кластера (1) устройства для определения направления прихода ШАЛ, состоящего из трех детекторов космических лучей. Для повышения точности определения направления ШАЛ количество детекторов может быть увеличено. Внутри кластера детекторы могут располагаться произвольно в пространстве по всем трем координатам (х, y, z), при этом расстояние между парой соседних детекторов должно лежать в диапазоне 3-80 м. Кластер (1) (см. фиг.2) состоит из трех детекторов (7). Выходы с детекторов (7) подключены к входу блока временного анализа (8). Выходы с блока (8) подключены к входу блока отбора событий (9), отбирающего случаи срабатывания не менее трех детекторов кластера одновременно. Выход блока (9) подключен к входу блока определения локального направления (10). Выход блока (10) подключен к блоку хранения и передачи данных (11) посредством сети стандарта Ethernet или WiFi по протоколу TCP/IP на блок сбора данных с кластеров (2) (фиг.1). В качестве блока (8) может быть использован сканирующий аналого-цифровой преобразователь (АЦП). В случае необходимости блок (11) может быть реализован на базе ЭВМ.
В качестве детекторов для реализации способа определения направления прихода широких атмосферных ливней, в частности, могут использоваться сцинтилляционные счетчики, принципиальная схема которых показана на фиг.3.
Корпус (12) детектора имеет пирамидальную форму, которая обеспечивает наилучшее собирание света от вспышек в пластичном сцинтилляторе (13), вызванных прохождением частиц, на фотокатод фотоэлектронного умножителя (ФЭУ) (14). Корпус (12) должен быть сделан из материала, который надежно защищает внутренне элементы детектора от внешних воздействий и может быть сделан, в частности, из нержавеющей стали. Сцинтиллятор (13) представляет собой пластину площадью не менее 0.25 м2 и толщиной не менее 3 см. При таких параметрах сцинтиллятора обеспечивается эффективная регистрация мюонов ШАЛ. Для увеличения светосбора внутренняя поверхность детектора должна иметь белое диффузно-отражающее покрытие.
Устройство, в частном случае его исполнения, работает следующим образом. Кластер установки включает три сцинтилляционные счетчика. Каждый из счетчиков состоит из пластины сцинтиллятора и ФЭУ. Регистрация света от вспышек в сцинтилляторе осуществляется при помощи ФЭУ. Электрические импульсы с ФЭУ со всех детекторов поступают на сканирующие АЦП. Сигналы с АЦП поступают в блок отбора событий, где выделяются сработавшие детекторы. Данные поступают на блок определения локального направления, в котором по времени регистрации частиц восстанавливается плоскость фронта илокальное направление ШАЛ в кластере. Полученная информация записывается в блок хранения и передачи информации. Блоком сбора данных с кластера собирается информация о локальных векторах со всех кластеров установки. Локальные данные записываются в блок хранения локальных векторов и передается на блок определения их направлений. После этого данные о направлении прихода широких атмосферных ливней записываются в память и выводятся на монитор или материальный носитель информации (в частности, на бумажный носитель с помощью принтера).
Таким образом, предложенное устройство позволяет определять направления прихода широких атмосферных ливней на установку при неравномерном распределении детекторов в пространстве. Такое устройство для определения направления прихода широких атмосферных ливней может быть применено при размещении детекторов в городской среде на крышах зданий, а также в горной местности. Данный способ позволяет регистрировать и определять направления ШАЛ даже в условиях выхода из строя отдельных кластеров установки.
Способ диагностики аварийного ядерного реактора
Способ диагностики аварийного ядерного реактора
Способ и устройство для получения мюонографий
Способ обнаружения гелиосферных возмущений
Система считывания информации со стримерных камер
Комплекс для измерения угловой зависимости отклика оптического модуля нейтринного черенковского водного телескопа
Комплекс для измерения световыхода сцинтилляционных стрипов

