Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ НЕЛИНЕЙНОЙ ДИНАМИКОЙ ПРЕОБРАЗОВАТЕЛЕЙ ПОСТОЯННОГО НАПРЯЖЕНИЯ
Вид РИД
Изобретение
Изобретение относится к преобразовательной технике и может быть использовано при реализации цифровых систем управления преобразователями постоянного напряжения с функцией подавления опасных колебаний выходного напряжения, возникающих при определенном наборе параметров системы.
Известен способ управления IEEE International Conference on Automation, Quality and Testing. - 2006. - Vol.1. - P.156-172 [1], где на основе линеаризованной в малой окрестности проектного режима модели системы в форме стробоскопического отображения путем малого возмущения одного из параметров системы происходит стабилизация неустойчивого проектного режима (метод линеаризации отображения Пуанкаре). В результате чего непроектные периодические режимы, возникающие при определенном наборе параметров системы, исключаются, тем самым повышая надежность устройства и обеспечивая проектный динамический режим с малой амплитудой колебаний (цикл периода один или 1-цикл), когда частота колебаний равна частоте широтно-импульсного модулятора.
К основному недостатку данного способа относится неудовлетворительная работа алгоритма управления нелинейной динамикой в областях мультистабильности, когда одновременно устойчивы как проектный режим, так и опасные режимы, с большой амплитудой колебаний выходного напряжения. Рассматриваемый способ направлен лишь на стабилизацию проектного режима и не учитывает специфику областей мультистабильности, где проектный режим уже устойчив и его стабилизация не требуется, а требуется корректировка траектории движения в сторону бассейна притяжения проектного режима.
Известен также способ International Journal of Circuit Theory and Applications. - 1999. - Vol.27, №3. - P.617-631 [2], называемый методом с запаздывающей обратной связью. В данном случае для стабилизации неустойчивых периодических траекторий предполагается использование обратной связи с задержкой, приблизительно равной периоду стабилизируемого периодического режима.
К недостаткам данного метода можно отнести сложность выбора длительности задержки, отсутствие полного научного обоснования и, таким образом, отсутствие гарантии его корректной работы во всем диапазоне изменения параметров системы.
Задачей изобретения является управление нелинейной динамикой системы для обеспечения ее работы в проектном периодическом режиме с малой амплитудой колебаний в широком диапазоне параметров системы управления или входного напряжения с учетом возможности работы в областях мультистабильности.
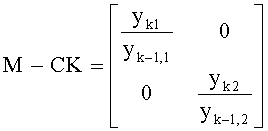
Технический результат достигается тем, что в стандартный метод линеаризации отображения Пуанкаре при работе системы в области мультистабильности вводится способ расчета величины возмущения коэффициента пропорционального регулятора, реализуемый вычислителем возмущения, основной задачей которого является возвращение системы к устойчивому проектному режиму, путем малого возмущения указанного коэффициента при попадании системы в опасный непроектный режим в области мультистабильности, что осуществляется с использованием основной матрицы линеаризованного стробоскопического отображения, которая находится по формуле
 ,
,
где yki - i-я компонента вектора Yk; yk-1,i - i-я компонента вектора Yk-1, Yk-1=Xk-1-X*; X* - неподвижная точка проектного режима; Xk-1 - вектор фазовых переменных Х в начале k-го тактового интервала; Х=[iL, uc], где iL - ток дросселя; uc - напряжение на конденсаторе; Yk=(1-c)Yk-1, где с - коэффициент, принадлежащий интервалу (0, 1).
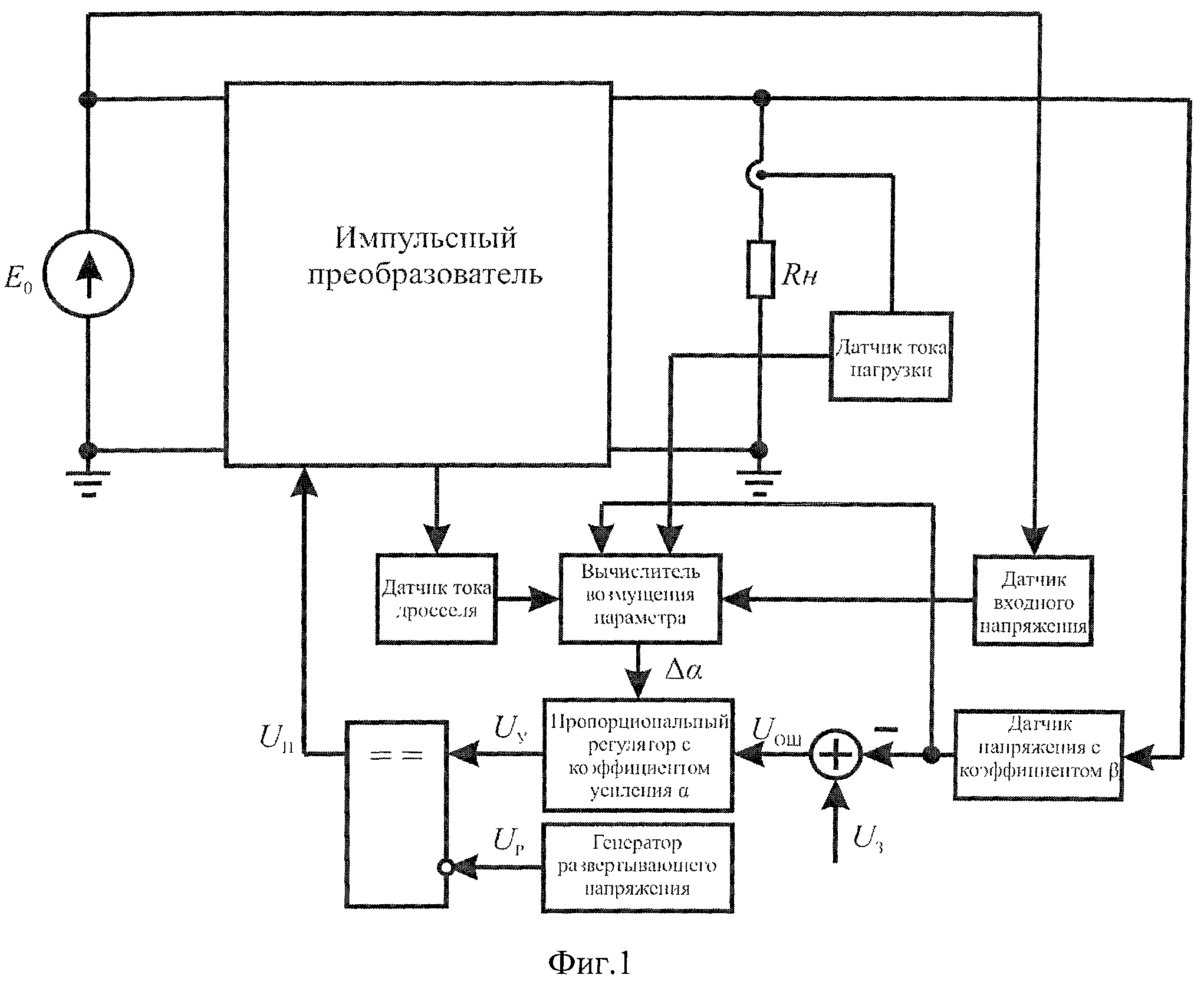
Фиг.1. показывает общую структуру системы управления.
Фиг.2. поясняет процесс перехода к 1-циклу в области мультистабильности.
Вычисление системой управления требуемого приращения коэффициента усиления пропорционального регулятора ведется на основе математической модели преобразователя с применением ряда вычислительных алгоритмов. Основная задача вычислителя возмущения параметра - это расчет такого приращения коэффициента пропорционального регулятора Δα, которое приведет к стабилизации неустойчивого проектного режима как в прототипе или возвратит систему в проектный режим в областях мультистабильности.
При реализации алгоритма управления используется математическая модель в форме стробоскопического отображения, связывающая переменные состояния системы в начале тактового интервала (Xk) с переменными состояния в конце тактового интервала (Xk-1) и учитывающая режим прерывистых токов дросселя, которая имеет вид

где  ;
;  - моменты коммутации полупроводниковых приборов (транзистора и диода соответственно) на тактовом интервале в относительном времени, Х=[iL, uc] - вектор переменных состояния (iL - ток дросселя; uc - напряжение на конденсаторе), а - длительность тактового интервала,
- моменты коммутации полупроводниковых приборов (транзистора и диода соответственно) на тактовом интервале в относительном времени, Х=[iL, uc] - вектор переменных состояния (iL - ток дросселя; uc - напряжение на конденсаторе), а - длительность тактового интервала,
 ,
,
 ,
,
 ,
,
 ,
,
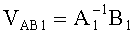
где Ai - матрица параметров системы на i-том участке постоянства структуры силовой части, VABi - вектор на i-том участке постоянства структуры силовой части, Е - единичная матрица.
Моменты коммутации транзистора zk1, диода zk2 и неподвижная точка отображения Xk-1 для 1-цикла вычисляется на основе системы нелинейных трансцендентных уравнений, как в [3]

где Uз - напряжение задания, Uоп - амплитуда опорного пилообразного напряжения, α - коэффициент усиления пропорционального регулятора, β - коэффициент обратной связи, c1=[0; 1] и c2=[1; 0] - постоянные векторы, определяющие компоненту вектора переменных состояния, участвующую в выражениях (2).
Функции Xtki, входящие в состав уравнений (2), определяются по выражениям

Локальная устойчивость периодического режима оценивается на основе матрицы эволюции F линеаризованного уравнения для возмущенного движения

где εk - возмущение в конце k-го тактового интервала, εk-1 - возмущение в начале k-го тактового интервала; Fk - матрица эволюции на k-м тактовом интервале. Локальная устойчивость 1-цикла анализируется на основе собственных чисел матрицы монодромии F1 (мультипликаторов).
Отображение (1) в общем виде может быть представлено как

Отображение (5) заменяется близким к нему линеаризованным в точке (X*,α*)

где 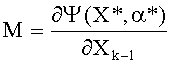 - матрица монодромии стабилизируемого 1-цикла (в данном случае M=F1),
- матрица монодромии стабилизируемого 1-цикла (в данном случае M=F1),  - производная отображения по возмущаемому параметру; Yk-1=Xk-1-X*; uk-1=αk-1-α* - требуемое возмущение параметра; Х* - неподвижная точка проектного режима; α* - невозмущенное значение коэффициента усиления пропорционального регулятора.
- производная отображения по возмущаемому параметру; Yk-1=Xk-1-X*; uk-1=αk-1-α* - требуемое возмущение параметра; Х* - неподвижная точка проектного режима; α* - невозмущенное значение коэффициента усиления пропорционального регулятора.
Для линейной системы (6) выбирается стабилизирующее управление uk-1 в виде линейной обратной связи по состоянию

Линеаризованная функция стробоскопического отображения системы имеет вид

При попадании системы в область мультистабильности основной задачей является обеспечение работы системы в проектном режиме даже в случае воздействия внешних помех. Для этого необходимо сформировать такое управляющее воздействие в виде возмущения параметра α, возвращающее систему в проектный режим (1-цикл). На основании выражения (8) и известных Yk-1 и Yk можно найти матрицу линеаризованного отображения Пуанкаре М-СК по упомянутой выше формуле
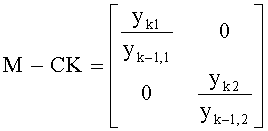 .
.
Коэффициент с выбирается исходя из требуемой скорости стабилизации и допустимых значений возмущения параметра α. При выборе указанного коэффициента равным единице, переход в проектный режим осуществляется за один тактовый интервал, но при этом могут быть велики значения возмущения параметра uk-1. При меньших значениях данного коэффициента, переход может длиться несколько тактовых интервалов. Расчет вектора обратных связей K и требуемого возмущения параметра uk-1 выполняется на основе формулы Аккермана [4].
Основные этапы работы цифровой системы управления при реализации предлагаемого способа управления.
1. С использованием датчиков определяется текущее входное напряжение, выходное напряжение, ток нагрузки, ток дросселя.
2. Рассчитывается сопротивление нагрузки на основе данных датчиков (п.1).
3. Для текущего набора параметров системы рассчитываются параметры 1-цикла на основе системы (2), даже если он неустойчив.
4. Рассчитывается матрица монодромии 1-цикла  и ее собственные числа (мультипликаторы) с использованием численных методов дифференцирования.
и ее собственные числа (мультипликаторы) с использованием численных методов дифференцирования.
5. Рассчитывается частная производная от функции отображения (5) по возмущаемому параметру, который доступен для регулировки системой управления.
6. В начале каждого тактового интервала на основе анализа мультипликаторов матрицы монодромии принимается решение об используемом алгоритме. Если хотя бы один мультипликатор матрицы монодромии больше единицы (1-цикл неустойчив), то используется алгоритм прототипа, иначе - модифицированный алгоритм.
7. Рассчитывается требуемое возмущение параметра.
8. В случае если величина возмущения параметра α превышает заранее заданное значение, или пересчитанное значение параметра выходит за допустимые рамки, то актуализация этого значения параметра не происходит. В противном случае в системе управления производится актуализация нового значения параметра, полученного с учетом требуемого возмущения uk-1.
Система управления, структура которой представлена на фиг.1 может быть выполнена на основе цифрового сигнального процессора или программируемой логической интегральной схемы.
Предлагаемый алгоритм управления нелинейной динамикой импульсных преобразователей напряжения может быть использован для широкого класса систем.
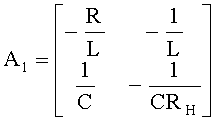
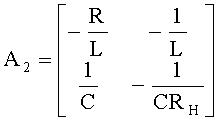
Для наиболее распространенных преобразователей напряжения матрицы и вектора математической модели (1) на каждом участке определяются по следующим выражениям:
- непосредственный понижающий преобразователь
 ;
;  ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;
- непосредственный повышающий преобразователь
 ; ; ;
; ; ;  ;
;
 ;
;  ;
;  ;
;  ;
;
- непосредственный инвертирующий преобразователь
 ; ; ;
; ; ;
; ; .
Здесь приняты следующие обозначения: Bi - вектор вынуждающих воздействий на i-м участке гладкости, R - активное сопротивление дросселя, L - индуктивность дросселя, С - емкость конденсатора, Rн - сопротивление нагрузки.
Управление системой автоматического управления с импульсными преобразователями с использованием данного способа позволяет обеспечить проектный режим в широком диапазоне параметров системы, что, с одной стороны, устраняет противоречия между необходимостью реализации заданного быстродействия системы и, с другой стороны, обеспечением проектного динамического режима.
Источники информации, принятые во внимание при экспертизе
1. Dragan, F. Controlling a chaotic behavior of a Current Mode Controlled Boost Converter Using Ott-Grebogy-Yorke Method / F. Dragan // IEEE International Conference on Automation, Quality and Testing. - 2006. - Vol.1. - P.156-172.
2. Batlle, С. Stabilization of periodic orbits of the buck converter by time-delayed feedback / C. Batlle, E. Fossas, G. Olivar // International Journal of Circuit Theory and Applications. - 1999. - Vol.27, №3. - P.617-631.
3. Кобзев, А.В. Нелинейная динамика полупроводниковых преобразователей / А.В. Кобзев, Г.Я. Михальченко, А.И. Андриянов, С.Г. Михальченко. - Томск: Томск, гос. ун-т систем управления и радиоэлектроники, 2007. - 224 с.
4. Дорф, Р. Современные системы управления / Р. Дорф, Р. Бишоп. - М.: Лаборатория базовых знаний, 2002. - 832 с.
Способ управления нелинейной динамикой преобразователей постоянного напряжения, основанный на линеаризации отображения Пуанкаре, отличающийся тем, что в стандартный метод линеаризации отображения Пуанкаре (прототип) при работе системы в области мультистабильности вводится способ расчета величины возмущения коэффициента пропорционального регулятора, реализуемый вычислителем возмущения, основной задачей которого является возвращение системы к устойчивому проектному режиму, путем малого возмущения указанного коэффициента при попадании системы в опасный непроектный режим в области мультистабильности, что осуществляется с использованием основной матрицы линеаризованного стробоскопического отображения, которая находится по формуле ,где y- i-я компонента вектора Y; y- i-я компонента вектора Y, Y=X-X*; X* - неподвижная точка проектного режима; X - вектор фазовых переменных в начале k-го тактового интервала; Х=[i, u], где i - ток дросселя; u - напряжение на конденсаторе; Y=(1-c)Y, где с - коэффициент, принадлежащий интервалу (0, 1).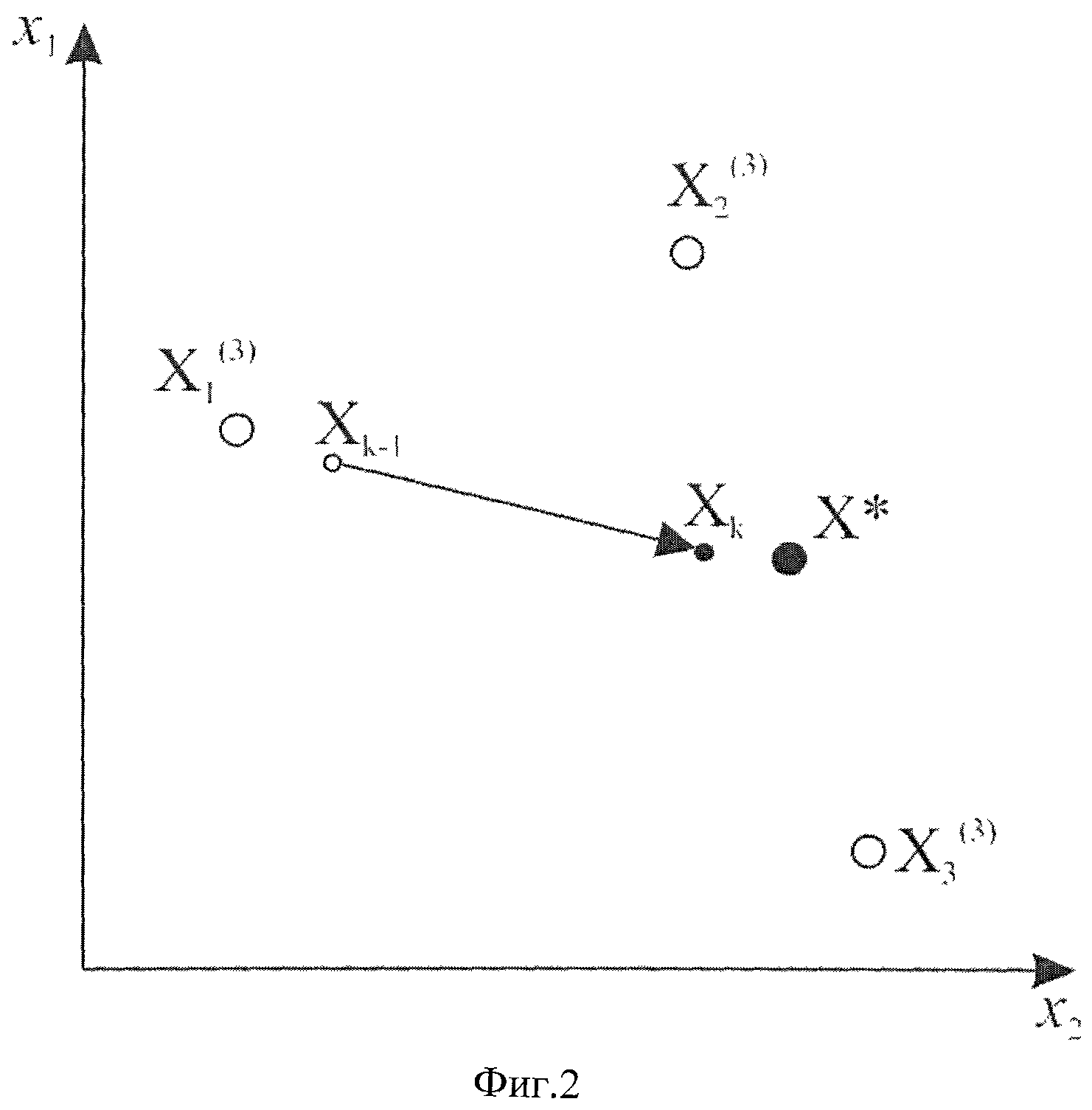
Гидравлический амортизатор с электрическим генератором
Гидравлический амортизатор с электрическим генератором
Гидродвигатель внутреннего сгорания с электрическим генератором
Вихрекамерный дизель
Электрический генератор с подвижным цилиндром двигателя внутреннего сгорания
Матрица пластинчатого теплообменника
Устройство для определения адгезии металлических поверхностей
Компактированный реагент для обработки валкового расплава
Электрический генератор с двигателем стирлинга
Двухтактный двигатель внутреннего сгорания с электрическим генератором
Двухтактный двигатель внутреннего сгорания с электрическим генератором

