Результат интеллектуальной деятельности: ПЕРЕДВИЖНОЙ ТЕЛЕСКОПИЧЕСКИЙ ПОДЪЕМНЫЙ КРАН
Вид РИД
Изобретение
Область техники, к которой относится предлагаемое изобретение
Предлагаемое изобретение относится к передвижному телескопическому подъемному крану согласно ограничительной части п.1 формулы изобретения.
Предпосылки создания предлагаемого изобретения
В публикации EP 1354842 A2 раскрывается передвижной телескопический подъемный кран, имеющий две анкерные опоры, расположенные на крановой стреле и наклоненные относительно плоскости перемещения груза. Для увеличения рабочей нагрузки передвижного телескопического подъемного крана упомянутые анкерные опоры с помощью фиксирующих тросов соединены со свободным концом крановой стрелы и верхней частью конструкции. В результате такого решения обеспечивается лучшее демпфирование нагрузок, действующих на крановую стрелу в поперечном направлении, которые могут быть фактором, ограничивающим рабочую нагрузку при работе крановой стрелы. Недостатком такого подвижного телескопического подъемного крана является то, что анкерные опоры дают существенную добавку веса. Поэтому анкерные опоры приходится перевозить к месту строительства отдельно на грузовом автомобиле и там монтировать их на крановой стреле. Это связано с существенным удорожанием работ и дополнительными затратами времени.
В публикации GB 2387373 A раскрывается машина для перемещения материалов, снабженная подвижной рамой и крановой стрелой, которая шарнирно соединена с подвижной рамой и имеет телескопическую конструкцию. Крановая стрела выполнена из некоторой совокупности стволов, при этом приемная вилка для перемещаемого груза расположена на самом внешнем стволе стрелы. Стволы крановой стрелы имеют телескопическую конструкцию, так что крановая стрела выполнена с возможностью выдвижения и втягивания, чем достигается перемещение приемной вилки с расположенным на ней грузом по направлению к упомянутой раме и в противоположном направлении. С целью уменьшения опрокидывающего момента относительно переднего моста машины по меньшей мере один ствол крановой стрелы выполнен из композитного материала. В результате такого решения удается уменьшить вес крановой стрелы и, следовательно, величину опрокидывающего момента относительно переднего моста машины. Для этого, например, конструкция самого внешнего ствола крановой стрелы может быть сделана состоящей из трех секций, выполненных из композитного материала.
Цель предлагаемого изобретения
Целью предлагаемого изобретения является создание передвижного телескопического подъемного крана, обеспечивающего повышение рабочей нагрузки.
Краткое описание предлагаемого изобретения
Указанная цель достигается созданием передвижного телескопического подъемного крана, признаки которого содержатся в пункте 1 формулы изобретения. Крановая стрела имеет в своем составе по меньшей мире три ствола, которые отстоят друг от друга и жестко соединены между собой с возможностью изгиба, поэтому момент инерции площади крановой стрелы существенно возрастает. Момент инерции площади, который является мерой изгибной жесткости, согласно теореме параллельных осей происходит из собственных долей секций стволов крановой стрелы и их долей Штейнера. Благодаря изгибно-жестким соединительным элементам, с помощью которых осуществлено соединение секций стволов крановой стрелы, крановой стреле придается чрезвычайная изгибная жесткость, так что при нагружении крановой стрелы площадь поперечного сечения остается по существу одинаковой, поэтому при вычислении момента инерции площади могут быть приняты теоретические значения долей Штейнера, но факультативно может быть использован понижающий коэффициент. Кроме того, в выдвинутом рабочем положении крановой стрелы высокая степень жесткости достигается с помощью механического блокирования соответствующих соседствующих в продольном направлении секций крановой стрелы, поскольку стволы, составленные из стволовых секций, обладают чрезвычайной изгибной жесткостью благодаря этому блокированию. Представляется предпочтительным такое решение, при котором соответствующие соседствующие в продольном направлении секции каждого ствола крановой стрелы механически блокированы друг относительно друга. Такое блокирование осуществляется, например, с помощью блокировочных задвижек, которые могут приводиться в действие гидравлическим, пневматическим или электромеханическим способом. В альтернативном варианте это блокирование может осуществляться с помощью штыкового блокировочного механизма.
Благодаря упомянутым по меньшей мере трем стволам крановой стрелы обеспечивается высокая степень ее жесткости как по отношению к изгибающим силам, действующим перпендикулярно к плоскости перемещения груза, так и по отношению к изгибающим силам, действующим в плоскости перемещения груза. Если крановая стрела имеет точно три ствола, то они могут быть расположены с образованием в поперечном сечении треугольника, при этом обеспечивается возможность регулирования жесткости по ширине и высоте крановой стрелы как по отношению к изгибающим силам, действующим перпендикулярно к плоскости перемещения груза, так и по отношению к изгибающим силам, действующим в плоскости перемещения груза. Такое расположение применимо, когда крановая стрела имеет по меньшей мере четыре, в частности преимущественно четыре ствола.
По причине значительного увеличения момента инерции площади или моментов инерции площадей крановой стреле согласно предлагаемому изобретению могут быть приданы совершенно другие размеры, чем у известных крановых стрел, так что по сравнению с известной крановой стрелой с анкерными опорами соответствующее увеличение рабочей нагрузки может быть достигнуто с меньшей прибавкой веса. Стволы крановой стрелы имеют секционную конструкцию, их секции являются телескопическими в продольном направлении, такие крановые стрелы могут переводиться из транспортировочного состояния в рабочее с меньшими трудовыми затратами. Благодаря меньшей прибавке веса передвижной телескопический кран согласно предлагаемому изобретению - в пределах определенного класса нагрузок - может обеспечивать возможность транспортировки к месту проведения строительных работ с присоединенной крановой стрелой в потоке обычного дорожного движения, так что отпадает необходимость в отдельной транспортировке и трудоемкой сборке, в отличие от крановой стрелы с анкерными опорами. Поэтому передвижной телескопический подъемный кран согласно предлагаемому изобретению легко обеспечивает возможность увеличения рабочей нагрузки.
Кроме того, крановой стреле согласно предлагаемому изобретению могут быть приданы такие размеры, что по сравнению с известной крановой стрелой с анкерными опорами достигается опять же существенное увеличение рабочей нагрузки. В этом случае крановая стрела согласно предлагаемому изобретению тоже имеет существенный вес, так что передвижной телескопический подъемный кран со стрелой согласно предлагаемому изобретению, вероятно, уже не сможет обеспечивать возможности транспортировки к месту проведения строительных работ в потоке обычного дорожного движения. Отдельные стволы или группы стволов крановой стрелы, или же стрела целиком в таком случае должны транспортироваться к месту проведения строительных работ отдельно и там монтироваться. Поэтому при описываемом придании размеров крановой стрелы согласно предлагаемому изобретению преимущество состоит в увеличении рабочей нагрузки.
Количеством стволов крановой стрелы и их расположением и расстоянием друг от друга обеспечивается большое количество оптимизирующих параметров, так что для крановой стрелы согласно предлагаемому изобретению обеспечивается возможность оптимизации в отношении ее изгибной жесткости в направлениях перпендикулярно и/или параллельно плоскости перемещения груза и/или в отношении веса. В зависимости от того, к какому классу рабочих нагрузок принадлежит передвижной телескопический подъемный кран согласно предлагаемому изобретению, крановая стрела согласно предлагаемому изобретению может быть оптимизирована в отношении веса и/или в отношении изгибной жесткости или рабочей нагрузки. Представляется предпочтительным такое решение, при котором передвижной телескопический подъемный кран согласно предлагаемому изобретению имеет стрелу по меньшей мере с тремя, предпочтительно - по меньшей мере с четырьмя, еще более предпочтительно - по меньшей мере с пятью секциями или с соответственным количеством секций стволов.
Передвижной телескопический подъемный кран согласно п.2 формулы изобретения обеспечивает высокую степень жесткости крановой стрелы в отношении изгибающих нагрузок. Соответствующая площадь стволового поперечного сечения содержит материальную площадь поперечного сечения и пустотную площадь поперечного сечения, которая ограничена материалом ствола крановой стрелы.
Передвижной телескопический подъемный кран согласно п.3 формулы изобретения имеет повышенную жесткость по отношению к изгибающим силам, действующим перпендикулярно к плоскости перемещения груза. Ширина BA это максимальная ширина ствола крановой стрелы или соответствующего участка ствола крановой стрелы.
Передвижной телескопический подъемный кран согласно п.4 формулы изобретения имеет повышенную жесткость по отношению к изгибающим силам, действующим в плоскости перемещения груза. Высота HA это максимальная высота ствола крановой стрелы или соответствующего участка ствола крановой стрелы.
Передвижной телескопический подъемный кран согласно п.5 формулы изобретения обеспечивает одинаковое жесткостное поведение крановой стрелы в положительном и отрицательном боковых направлениях.
Передвижной телескопический подъемный кран согласно п.6 формулы изобретения обеспечивает возможность оптимизации жесткости крановой стрелы в отношении ее веса.
Передвижной телескопический подъемный кран согласно п.7 формулы изобретения обеспечивает компактное положение крановой стрелы при ее транспортировке. Благодаря возможности изменения высоты крановой стрелы, когда это необходимо, обеспечивается, в частности, такое состояние, что высота передвижного телескопического подъемного крана при операциях его транспортировки не превышает некоторой допустимой величины. Упомянутые по меньшей мере четыре ствола крановой стрелы могут быть выполнены, например, с возможностью линейного или поворотного перемещения друг относительно друга. Стволы крановой стрелы выполнены с возможностью быть заблокированными друг относительно друга в некотором смещенном рабочем положении. Это может быть осуществлено, в частности, с помощью механических блокираторов. Эти механические блокираторы могут быть расположены, в частности, на соединительных элементах.
Передвижной телескопический подъемный кран согласно п.8 формулы изобретения предусматривает телескопическую конструкцию стволов стрелы. Секции стволов, которые в продольном направлении являются соседствующими в продольном направлении, могут по телескопическому принципу вкладываться одна внутрь другой в каждом случае, или же направляться по телескопическому принципу, так что легко достигается телескопическая способность секций крановой стрелы в сочетании с высокой степенью жесткости крановой стрелы.
Передвижной телескопический подъемный кран согласно п.9 формулы изобретения имеет простую конструкцию. Секции стволов могут иметь, например, круглое сечение.
Передвижной телескопический подъемный кран согласно п.10 формулы изобретения обеспечивает высокую степень жесткости крановой стрелы, так что при нагрузке крановой стрелы площадь поперечного сечения остается по существу одинаковой, поэтому при вычислении момента инерции площади могут быть приняты теоретические значения долей Штейнера.
Передвижной телескопический подъемный кран согласно п.11 формулы изобретения легко обеспечивает возможность механического блокирования соседствующих в продольном направлении секций стволов крановой стрелы. Соответствующая блокировочная задвижка может приводиться в действие, например, гидравлическим, пневматическим, или электромеханическим способом. Представляется предпочтительным такое решение, при котором все соседствующие в продольном направлении секции каждого ствола крановой стрелы выполнены с возможностью механического блокирования друг относительно друга с помощью по меньшей мере одной блокировочной задвижки. Если крановая стрела имеет точно три ствола, то представляется предпочтительным такое решение, при котором ствол, расположенный в плоскости перемещения груза, выполнен с возможностью блокирования изнутри наружу, в то время как стволы, расположенные по сторонам от плоскости перемещения груза выполнены с возможностью блокирования снаружи внутрь. Это значит, что две соседствующих в продольном направлении секции ствола, расположенного в плоскости перемещения груза, выполнены с возможностью блокирования таким образом, что упомянутая по меньшей мере одна блокировочная задвижка для осуществления блокирования сначала проводится через внутреннюю, а затем через внешнюю стволовую секцию. Соответственно, другое решение имеет место в случае секций стволов, расположенных по сторонам от плоскости перемещения груза, при этом упомянутая по меньшей мере одна блокировочная задвижка для осуществления блокирования сначала проводится через внешнюю, а затем через внутреннюю стволовую секцию.
Передвижной телескопический подъемный кран согласно п.12 формулы изобретения обеспечивает возможность быстрого механического блокирования соседствующих в продольном направлении секций стволов крановой стрелы. Каждая блокировочная задвижка должна проводиться только через два предназначенных для нее фиксирующих канала соседствующих в продольном направлении секций стволов крановой стрелы с целью их механического блокирования друг относительно друга. Путь, который должен быть пройден для осуществления блокирования соответствующей блокировочной задвижкой, невелик. Соответствующая блокировочная задвижка должна проводиться только через два предназначенных для нее блокировочных канала, поэтому при ее установке не требуется высокая точность. Представляется предпочтительным такое решение, при котором предусматривается точно две блокировочных задвижки, которые располагаются друг напротив друга и выполнены с возможностью приведения их в действие в противоположных направлениях.
Передвижной телескопический подъемный кран согласно п.13 формулы изобретения обеспечивает высокую степень жесткости крановой стрелы по отношению к изгибающим силам, действующим перпендикулярно плоскости перемещения груза. Если бы по меньшей мере два из упомянутых стволов крановой стрелы, в наибольшей степени отстоящих от плоскости перемещения груза, были расположены на нижней стороне крановой стрелы, обращенной к ходовой части крана, так что ширина крановой стрелы уменьшалась бы от ее нижней стороны до ее верхней стороны, то упомянутые по меньшей мере два ствола крановой стрелы подвергались бы сжатию как от изгибающих сил, действующих в плоскости перемещения груза, так от изгибающих сил, действующих перпендикулярно плоскости перемещения груза. Такого типа конструкция крановой стрелы приводила бы к нежелательным ограничениям нагрузок крановой стрелы или передвижного телескопического подъемного крана из-за двойной сжимающей нагрузки в соответствии с теорией устойчивости Эйлера. Во избежание потери устойчивости упомянутые по меньшей два ствола крановой стрелы, в наибольшей степени отстоящие от плоскости перемещения груза, располагают на боковой или верхней стороне крановой стрелы в отдалении от ходовой части крана, так что изгибающие силы, действующие в плоскости перемещения груза, оказывают по существу растягивающую нагрузку, в то время как изгибающие силы, действующие перпендикулярно плоскости перемещения груза, оказывают сжимающую нагрузку на один из верхних стволов крановой стрелы. Благодаря такому решению удается значительно уменьшить сжимающую нагрузку на стволы крановой стрелы, в наибольшей степени отстоящие от плоскости перемещения груза. Таким образом, согласно предлагаемому изобретению, с одной стороны, увеличивается момент инерции площади, а с другой стороны, удается избежать двойной нагрузки. Благодаря ширине, которая увеличивается в направлении верхней стороны, достигается оптимальная изгибная жесткость крановой стрелы относительно изгибающих сил, действующих перпендикулярно плоскости перемещения груза. Пространство установки в процессе изменения положения крановой стрелы по существу не ограничено сверху, поэтому крановой стреле на верхней стороне ширина может придаваться в широком диапазоне размеров, в соответствии с потребностью. Если крановая стрела имеет точно три ствола, то нижний ствол крановой стрелы, обращенный к ходовой части крана, расположен в плоскости перемещения груза, а два верхних ствола крановой стрелы, которые удалены от ходовой части крана, расположены на расстоянии от плоскости перемещения груза, так что ширина крановой стрелы увеличивается от нижнего ствола крановой стрелы или от нижней стороны крановой стрелы к верхним стволам крановой стрелы или к верхней стороне крановой стрелы. Если крановая стрела имеет точно четыре ствола, которые расположены трапецеидально, то ширина крановой стрелы увеличивается, начиная от двух нижних стволов, обращенных к ходовой части крана, к двум верхним стволам крановой стрелы, удаленных от ходовой части крана. Поэтому нижние стволы крановой стрелы расположены на меньшем расстоянии от плоскости перемещения груза, чем верхние стволы крановой стрелы. В крановой стреле с трапецеидальным расположением стволов по мере того, как сжимающая нагрузка от изгибающих сил, действующих перпендикулярно плоскости перемещения груза, уменьшается с увеличением расстояния от плоскости перемещения груза, изгибная жесткость также оптимизируется относительно изгибающих сил, действующих перпендикулярно плоскости перемещения груза.
Передвижной телескопический подъемный кран согласно п.14 формулы изобретения имеет относительно жесткую и имеющую простую конструкцию крановую стрелу.
Передвижной телескопический подъемный кран согласно п.15 формулы изобретения обеспечивает для крановой стрелы, которая расположена в плоскости перемещения груза, возможность сочленения подобно известным крановым стрелам на верхней конструкции. Кроме того, тот ствол крановой стрелы, который расположен в плоскости перемещения груза, может быть использован для получения вмещающего пространства для гидравлического цилиндра, обеспечивающего телескопическое выдвижение и втягивание секций крановой стрелы. Кроме того, ствол крановой стрелы, расположенный в плоскости перемещения груза, обеспечивает демпфирование больших изгибающих сил, действующих в плоскости перемещения груза, благодаря своей площади A1 стволового поперечного сечения. Поэтому изгибная жесткость крановой стрелы соответственно велика. Отношение площади A1 стволового поперечного сечения этого ствола к площади A2 или А3 стволовых поперечных сечений других стволов удовлетворяет неравенству A1:Ai≥1, предпочтительно - A1:Ai≥1,5, еще более предпочтительно - A1:Ai≥2, где i=2 и 3. Представляется предпочтительным такое решение, при котором A2=А3.
Передвижной телескопический подъемный кран согласно п.16 формулы изобретения обеспечивает высокую степень жесткости крановой стрелы по отношению к изгибающим силам, действующим перпендикулярно плоскости перемещения груза. Нижний ствол крановой стрелы, который обращен к ходовой части крана, расположен в плоскости перемещения груза, а два верхних ствола крановой стрелы, которые удалены от ходовой части крана, расположены по сторонам от плоскости перемещения груза, поэтому ширина крановой стрелы увеличивается от нижнего ствола к двум верхним стволам. Таким образом, ширина крановой стрелы увеличивается от ее нижней стороны к ее верхней стороне. Упомянутый нижний ствол, расположенный в плоскости перемещения груза, по существу подвергается только сжатию под действием изгибающих сил, действующих в плоскости перемещения груза. Изгибающие силы, действующие перпендикулярно плоскости перемещения груза, по существу не приводят к сжимающим нагрузкам в нижнем стволе. В противоположность этому, верхние стволы, расположенные по сторонам от плоскости перемещения груза, по существу не подвергаются сжатию под действием изгибающих сил, действующих в плоскости перемещения груза. Поэтому во всех стволах крановой стрелы удается избежать двойной сжимающей нагрузки под действием изгибающих сил, действующих в плоскости перемещения груза и перпендикулярно плоскости перемещения груза. Благодаря указанному расположению трех стволов крановой стрелы момент инерции площади, с одной стороны, увеличивается согласно предлагаемому изобретению, но, с другой стороны, удается избежать двойной изгибающей нагрузки на отдельные стволы крановой стрелы под действием изгибающих сил, действующих в плоскости перемещения груза и перпендикулярно плоскости перемещения груза, что приводило бы к нежелательным ограничениям рабочей нагрузки. Соответственно, изгибная жесткость по отношению к изгибающим силам, действующим перпендикулярно плоскости перемещения груза, оптимизируется благодаря расположению стволов крановой стрелы. Расстояние, на котором находятся верхние стволы от плоскости перемещения груза, может варьироваться в широких пределах при проектировании размеров крановой стрелы, так как установочное пространство на верхней стороне крановой стрелы не ограничено, в частности, в транспортировочном положении крановой стрелы.
Передвижной телескопический подъемный кран согласно п.17 формулы изобретения обеспечивает одинаковое жесткостное поведение крановой стрелы в положительном и отрицательном боковых направлениях. Кроме того, крановая стрела имеет простую конструкцию.
Передвижной телескопический подъемный кран согласно п.18 формулы изобретения обеспечивает оптимальную конструкцию нижнего ствола крановой стрелы по отношению к изгибающим силам, действующим в плоскости перемещения груза. Благодаря поперечному сечению нижнего ствола по сравнению с известными крановыми стрелами крановая стрела согласно предлагаемому изобретению имеет повышенную изгибную жесткость по отношению к изгибающим силам, действующим в плоскости перемещения груза. В частности, способность нижнего ствола крановой стрелы к восприятию сжимающих нагрузок по существу повышена благодаря форме поперечного сечения крановой стрелы в сравнении с известными крановыми стрелами с по существу прямоугольным поперечным сечением. Кроме того, благодаря поперечному сечению нижнего ствола крановой стрелы обеспечивается возможность оптимизации веса крановой стрелы. Представляется предпочтительным такое решение, при котором поперечное сечение нижнего ствола крановой стрелы является круглым или овальным по всей площади стволового поперечного сечения. Однако из соображений производства или функционирования это поперечное сечение может на некоторых участках отклоняться от круглой или овальной формы. Например, на некоторых участках форма поперечного сечения может быть сделана уплощенной. Если нижний ствол крановой стрелы имеет поперечное сечение овальной формы, то максимальная ширина B1 в направлении, перпендикулярном плоскости перемещения груза, и максимальная высота H1 в плоскости перемещения груза, связаны соотношением H1:B1>1, предпочтительно - соотношением H1:B1≥1,2, более предпочтительно - соотношением H1:B1≥1,5. Представляется предпочтительным такое решение, при котором нижний ствол крановой стрелы перекрывается с верхними стволами крановой стрелы в направлении плоскости перемещения груза.
Передвижной телескопический подъемный кран согласно п.19 формулы изобретения обеспечивает, простым и компактным образом, способность крановой стрелы к телескопическому выдвижению и втягиванию.
Передвижной телескопический подъемный кран согласно п.20 формулы изобретения обеспечивает высокую степень жесткости крановой стрелы по отношению к изгибающим силам, действующим перпендикулярно плоскости перемещения груза. Благодаря блокированию на конечной стороне соседствующих в продольном направлении секций верхних стволов крановой стрелы, обеспечивается отведение изгибающих сил, действующих в боковых направлениях, на крановую стрелу в целом и демпфирование их ею. Это обеспечивается, в частности, тем, что соответствующая упомянутая по меньшей мере одна блокировочная задвижка непосредственно закреплена либо установлена с возможностью демонтажа на связанном с нею или прилегающем соединительном элементе.
Передвижной телескопический подъемный кран согласно п.21 формулы изобретения обеспечивает простое и компактное проведение троса.
Передвижной телескопический подъемный кран согласно п.22 формулы изобретения обеспечивает обычным способом подъем грузов с помощью поддерживающего троса. Этот поддерживающий трос проводится от свободного конца крановой стрелы к тросовой лебедке, которая расположена на верхней конструкции крана. Представляется предпочтительным такое решение, при котором поддерживающий трос проводится через направляющий канал.
Краткое описание прилагаемых чертежей
Другие признаки, преимущества и подробности предлагаемого изобретения будут изложены далее на ряде конкретных вариантов осуществления со ссылками на прилагаемые чертежи.
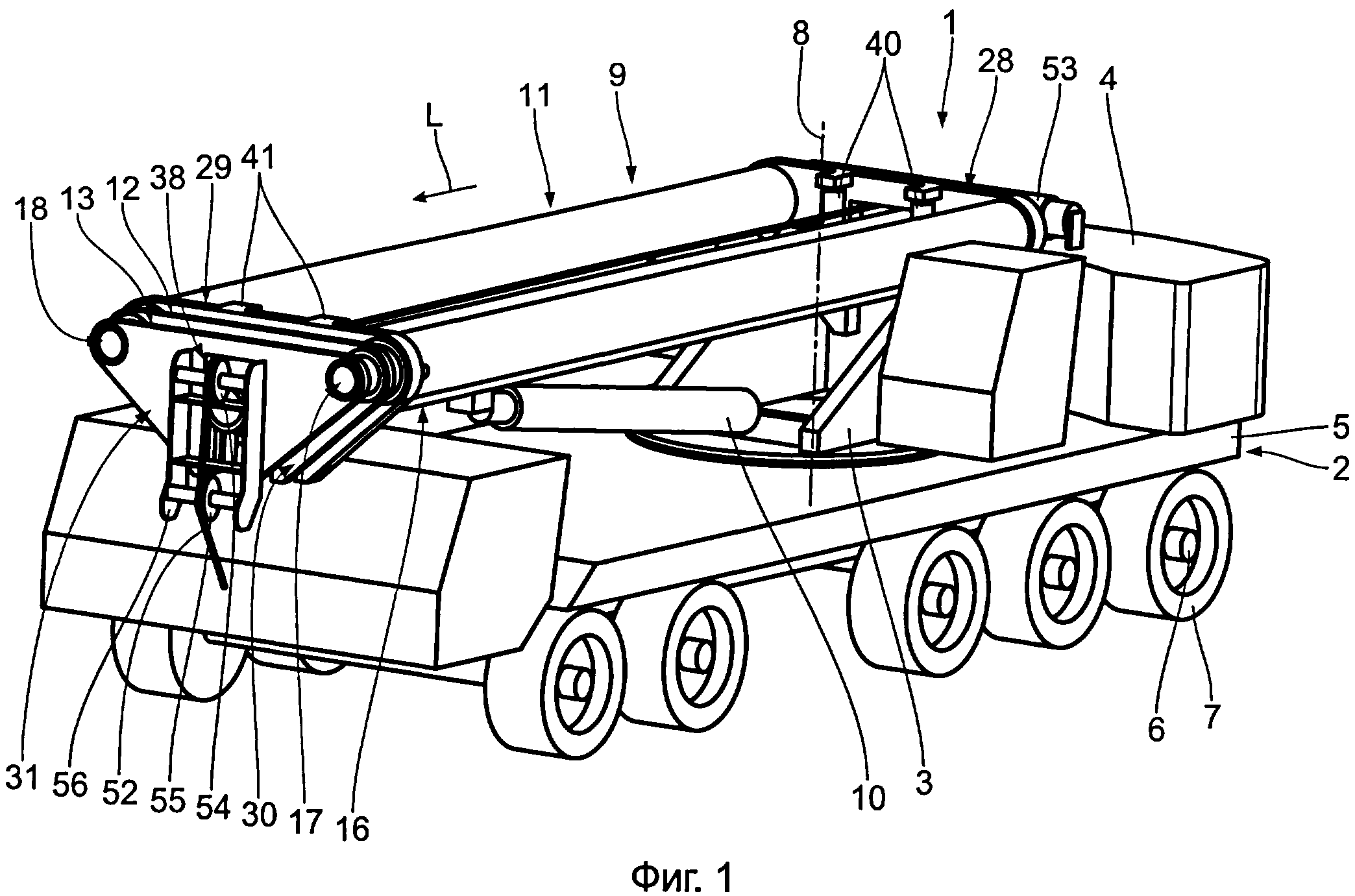
На фиг.1 в аксонометрии показан передвижной телескопический подъемный кран согласно первому варианту осуществления предлагаемого изобретения, снабженный телескопической крановой стрелой, в конструкцию которой входят три ствола, и которая находится в транспортировочном положении.
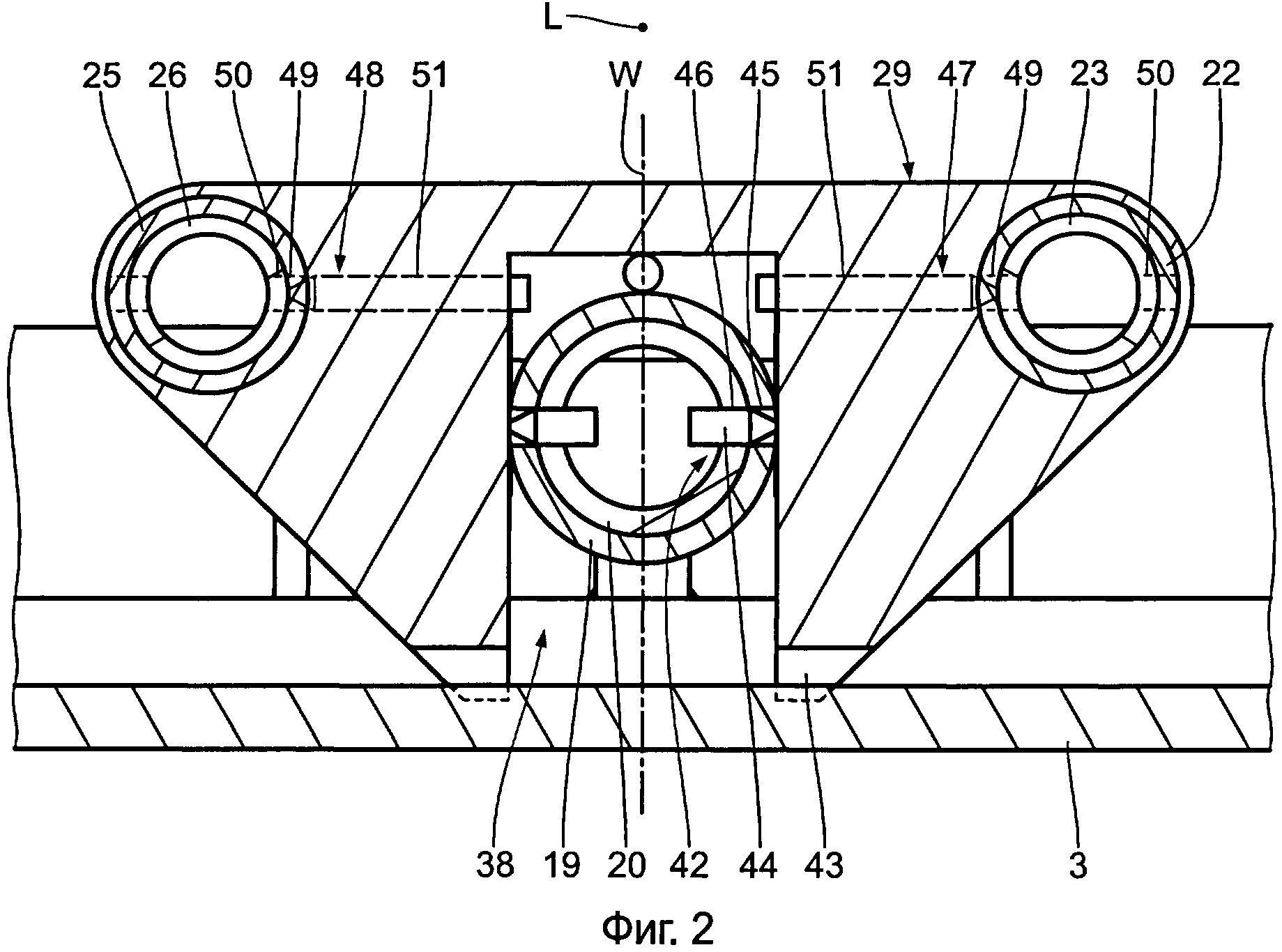
На фиг.2 передвижной телескопический подъемный кран, изображенный на фиг.1, показан в поперечном сечении через крановую стрелу.
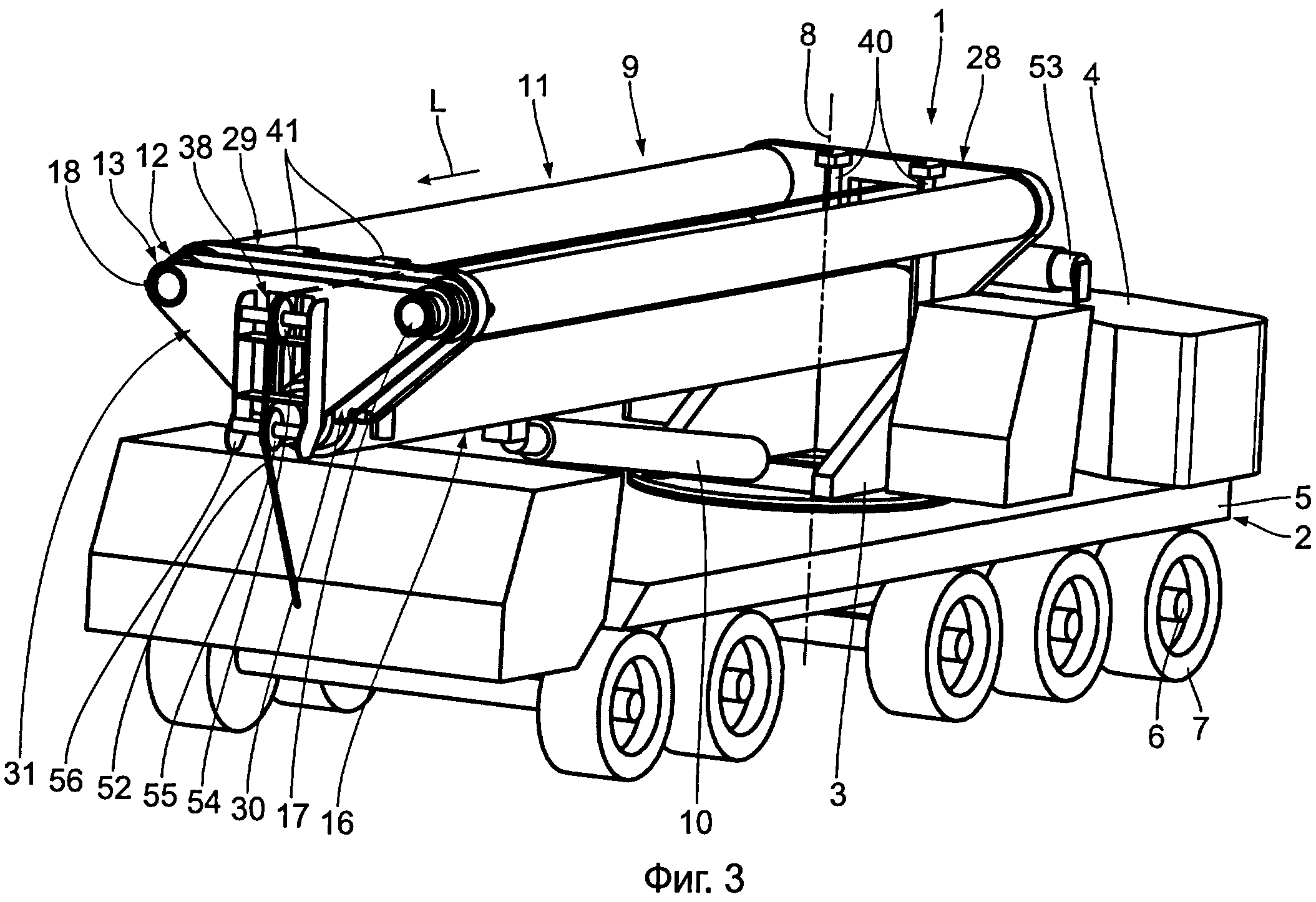
На фиг.3 передвижной телескопический подъемный кран, изображенный на фиг.1, показан в аксонометрии с крановой стрелой, втянутой в рабочем положении.
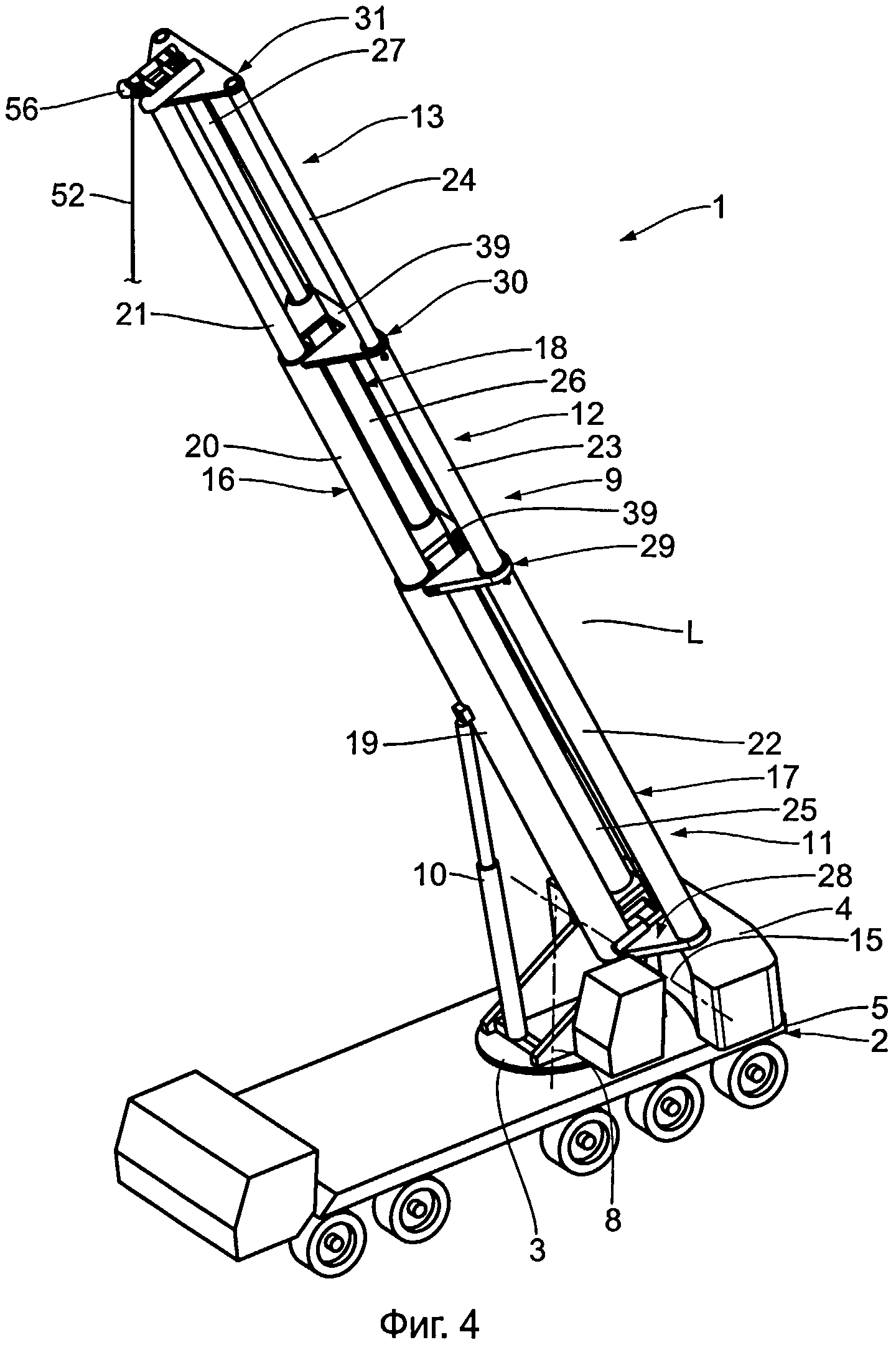
На фиг.4 передвижной телескопический подъемный кран, изображенный на фиг.1, показан в аксонометрии с крановой стрелой, выдвинутой в рабочее положение.
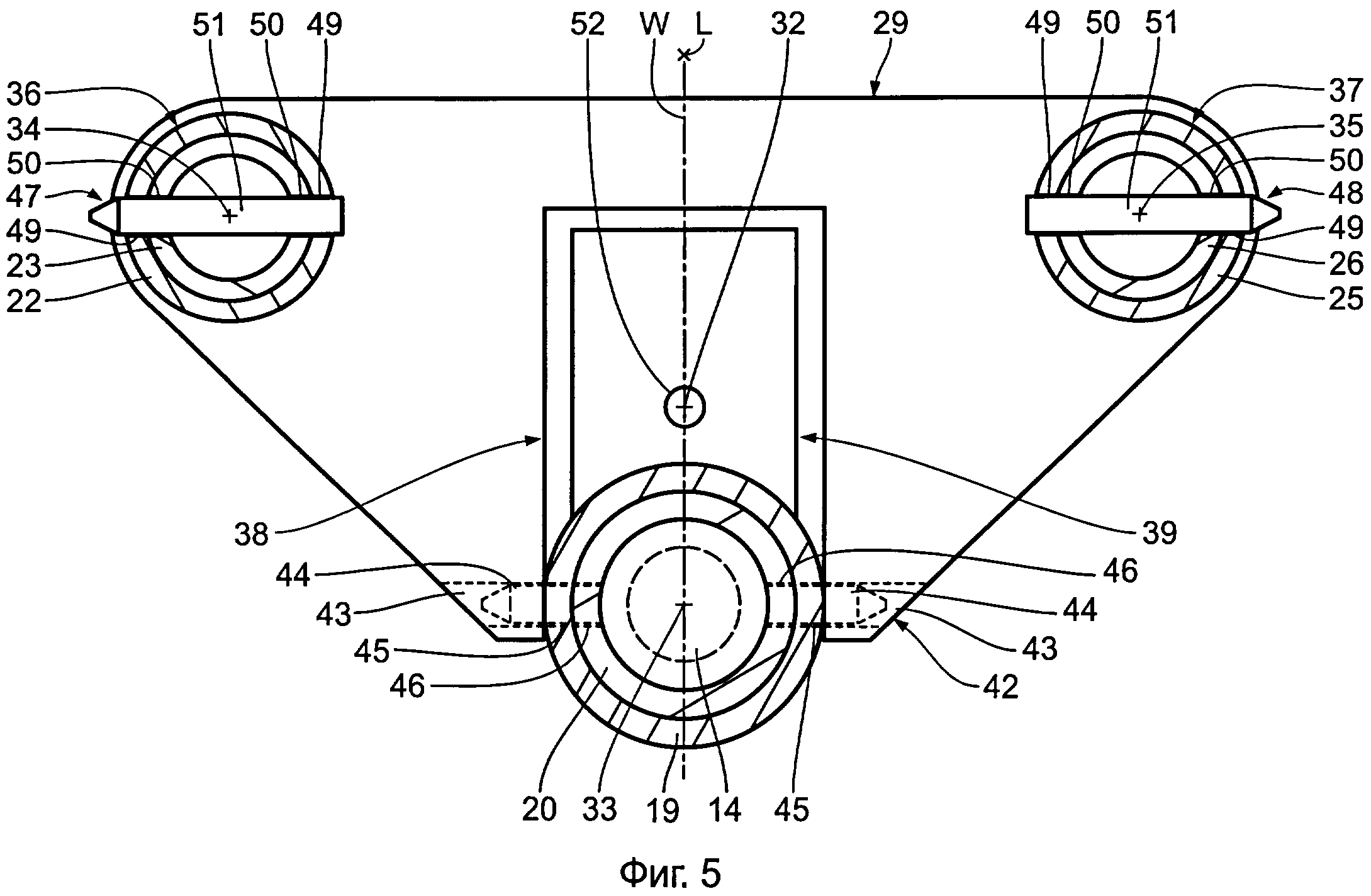
На фиг.5 показан вид в поперечном сечении через крановую стрелу, показанную на фиг.4, в области перед соединительным элементом.
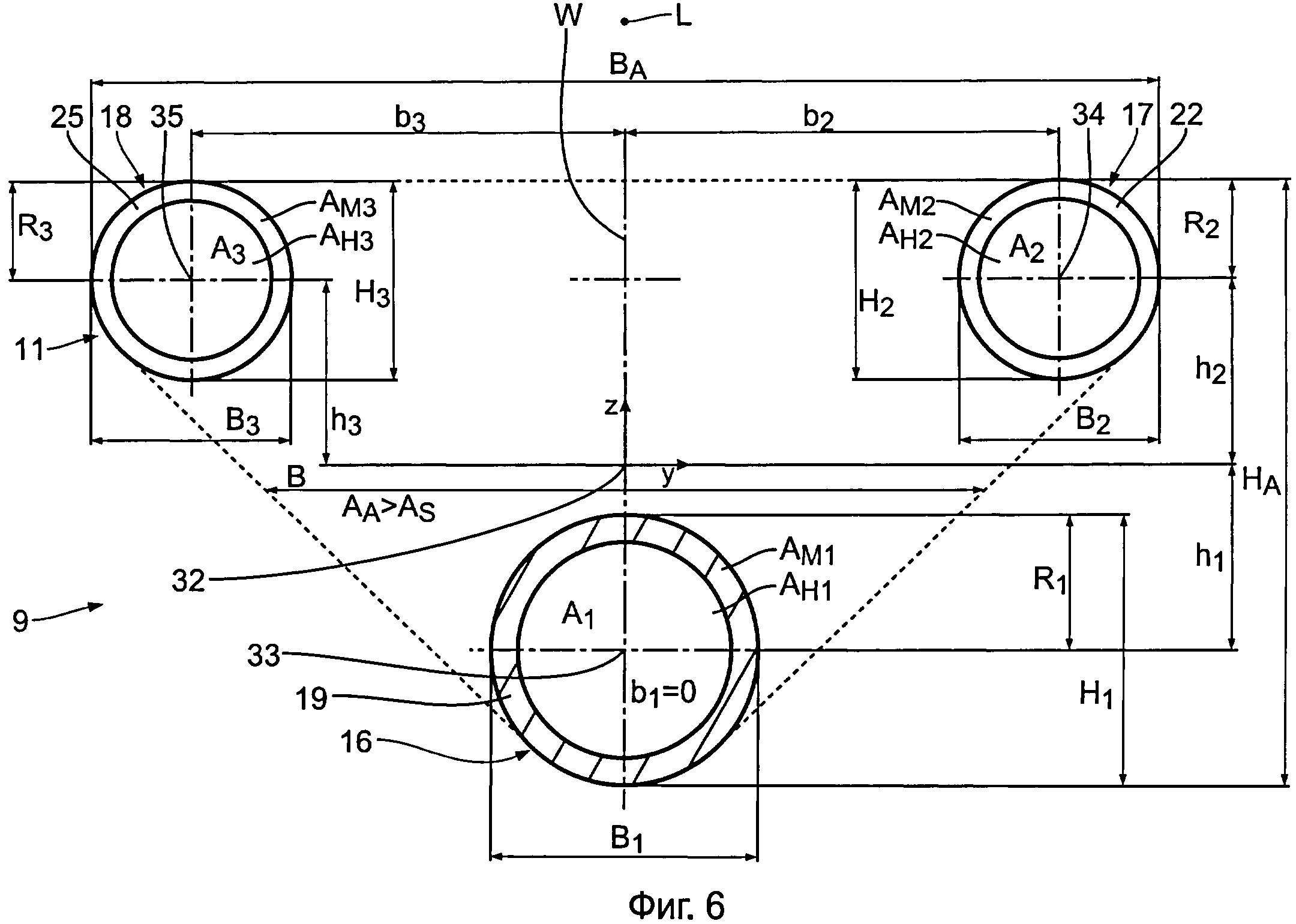
На фиг.6 показан вид в поперечном сечении через крановую стрелу, показанную на фиг.5, в области первой стволовой секции для иллюстрации расположения стволов крановой стрелы.
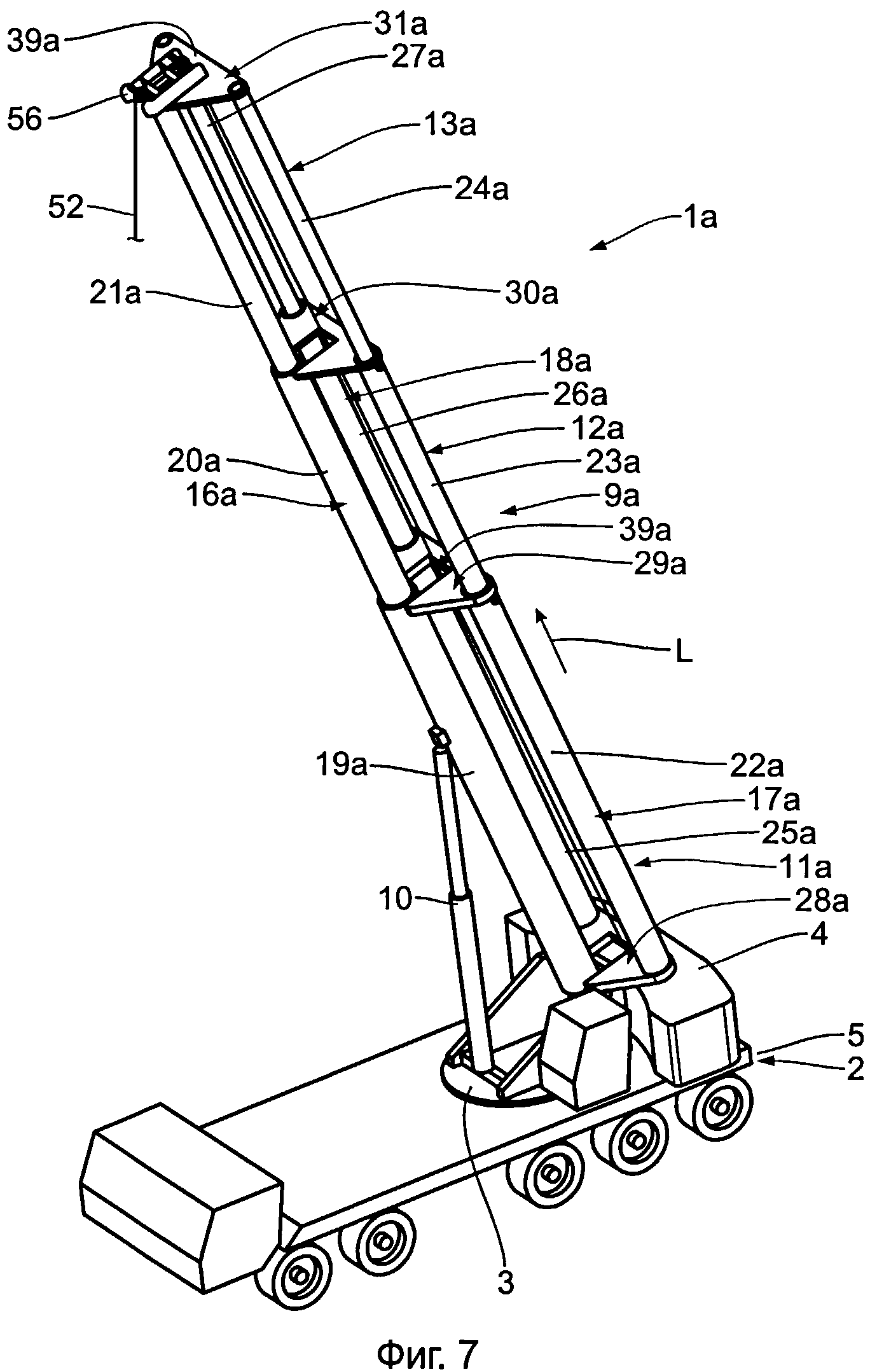
На фиг.7 в аксонометрии показан передвижной телескопический подъемный кран согласно второму варианту осуществления предлагаемого изобретения, снабженный крановой стрелой, в конструкцию которой входят три ствола, и которая находится в выдвинутом рабочем положении.
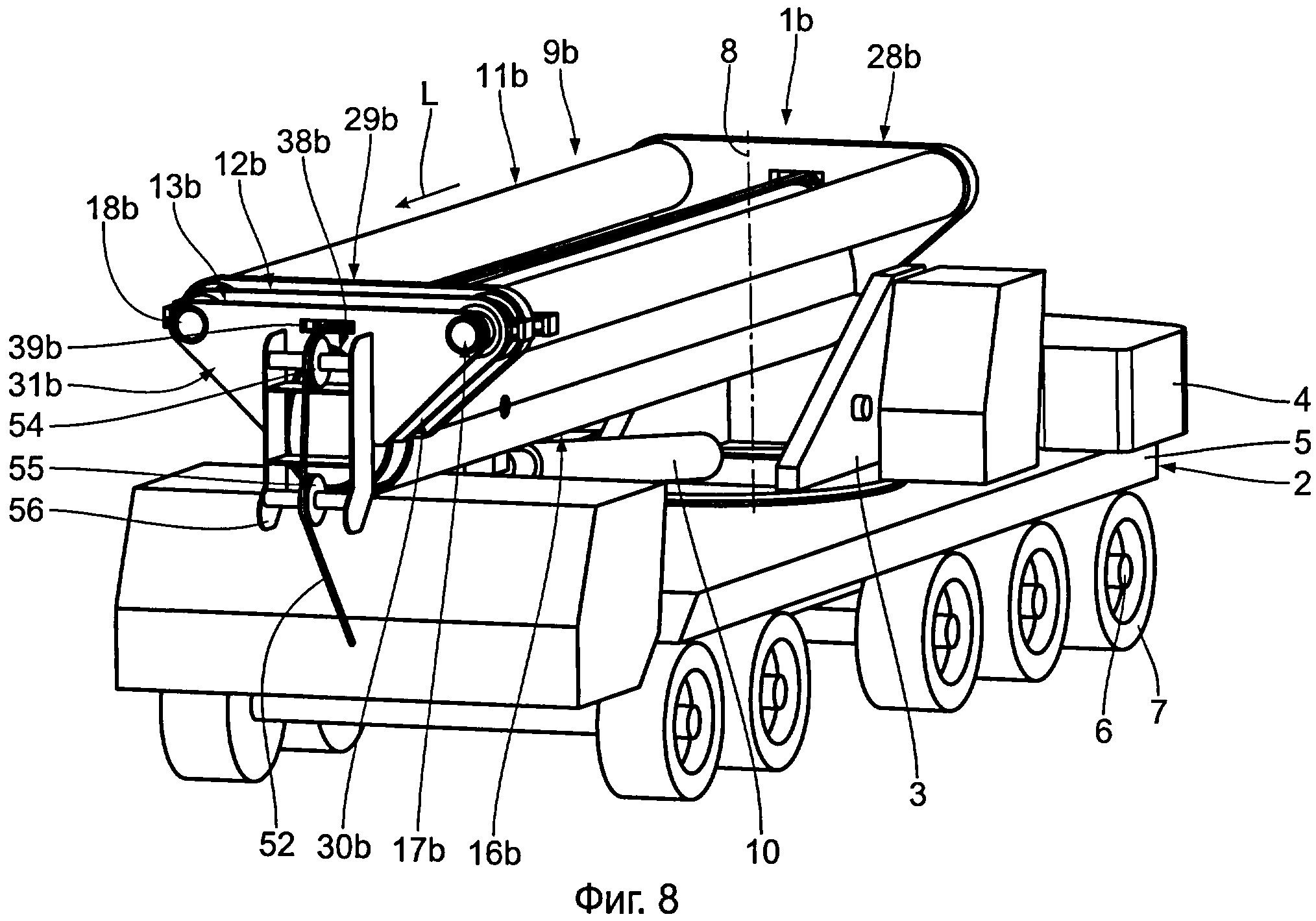
На фиг.8 в аксонометрии показан передвижной телескопический подъемный кран согласно второму варианту осуществления предлагаемого изобретения, снабженный крановой стрелой, в конструкцию которой входят три ствола, и которая находится в транспортировочном положении.
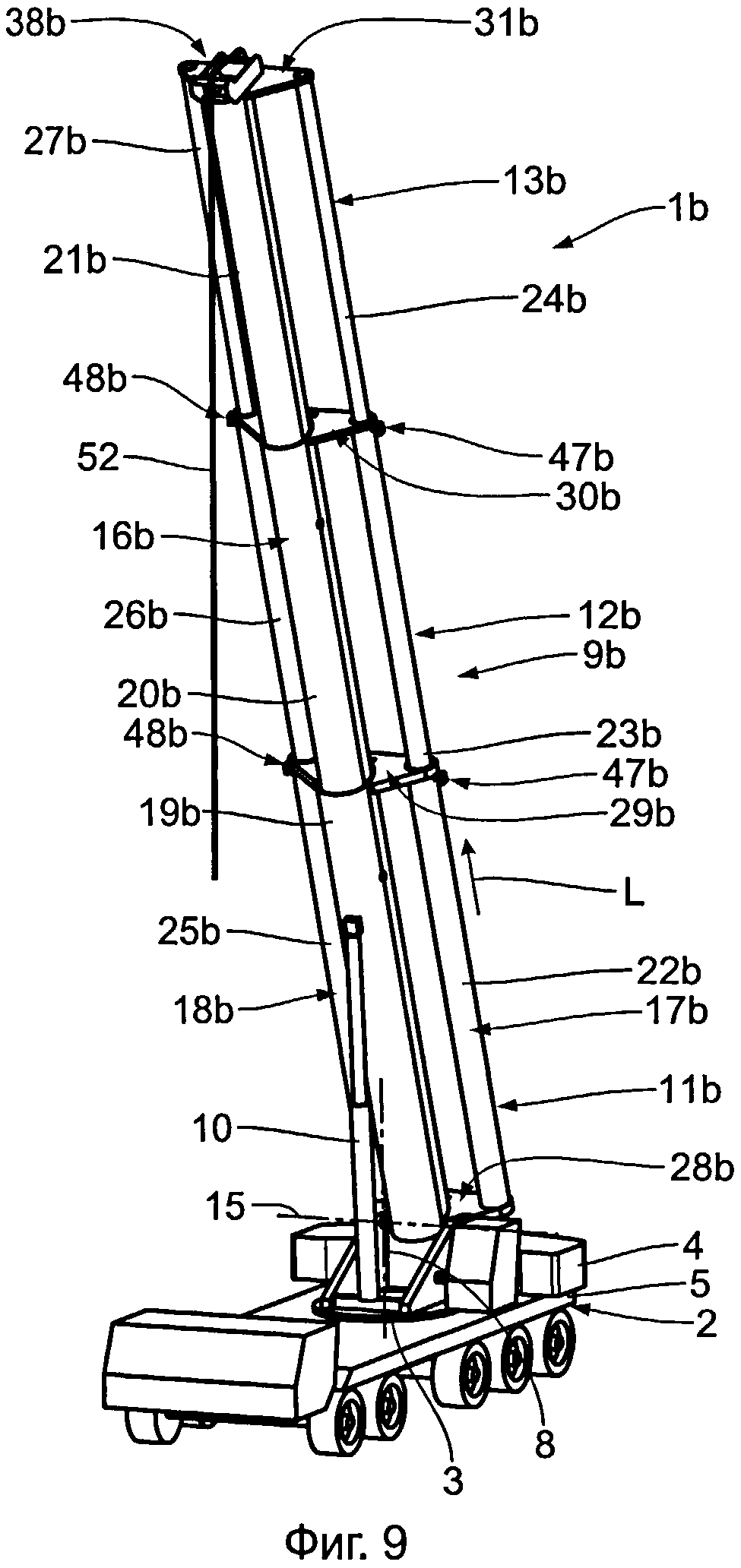
На фиг.9 передвижной телескопический подъемный кран, изображенный на фиг.8, показан в аксонометрии с крановой стрелой, развернутой в рабочее положение.
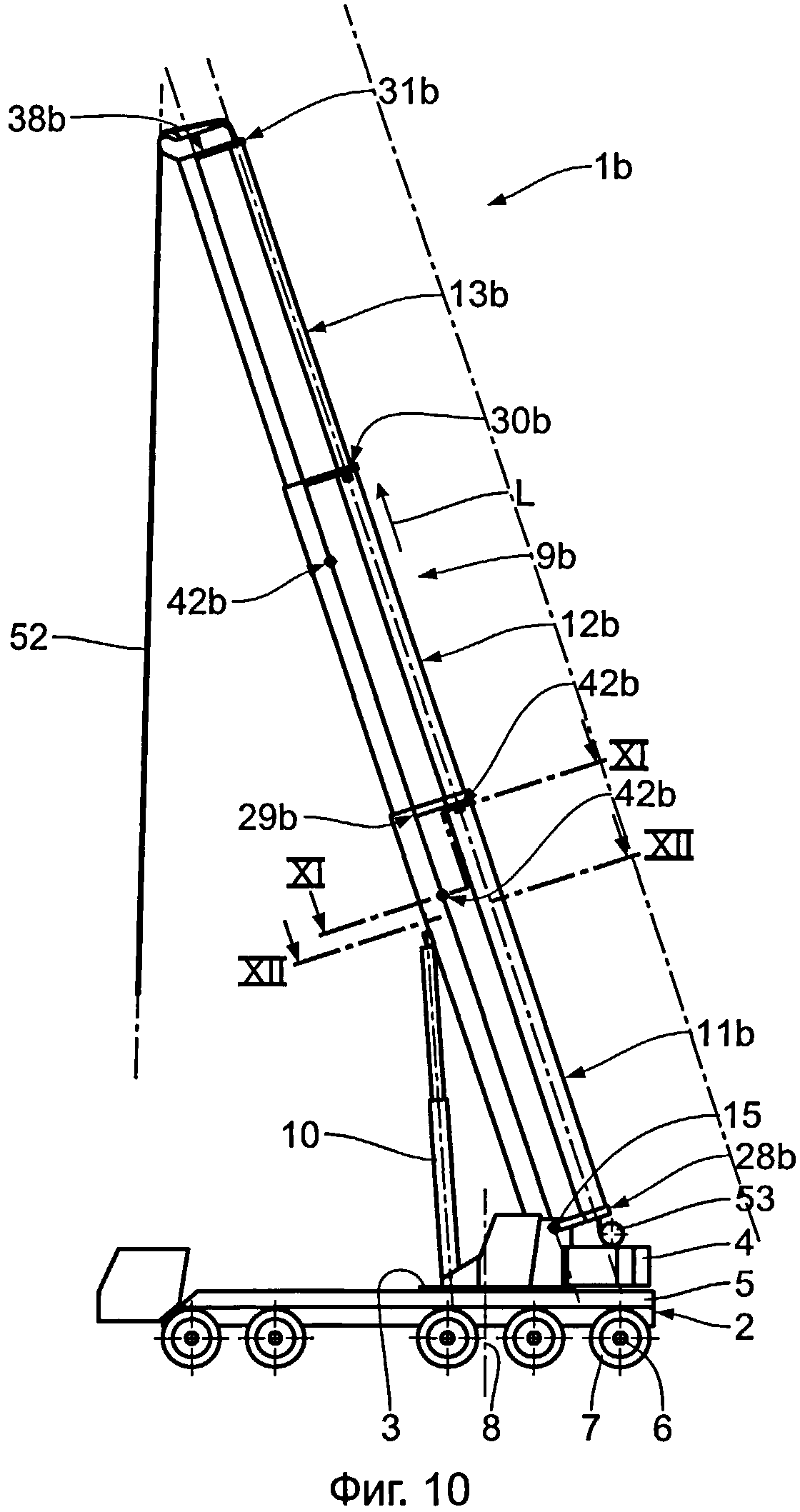
На фиг.10 передвижной телескопический подъемный кран, изображенный на фиг.9, показан на виде сбоку.
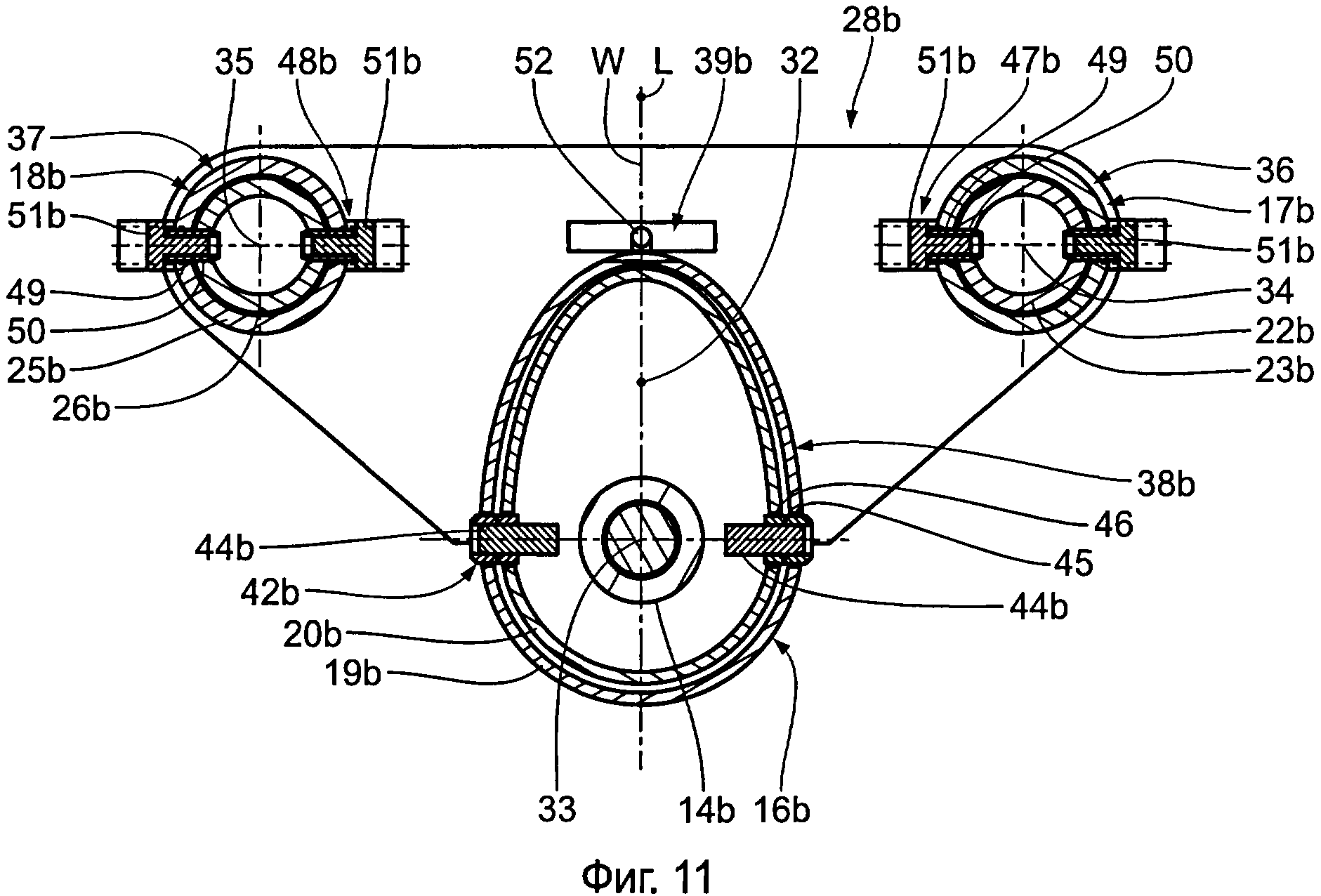
На фиг.11 показан вид в поперечном сечении через крановую стрелу, изображенный на фиг.10, по линии XI-XI.
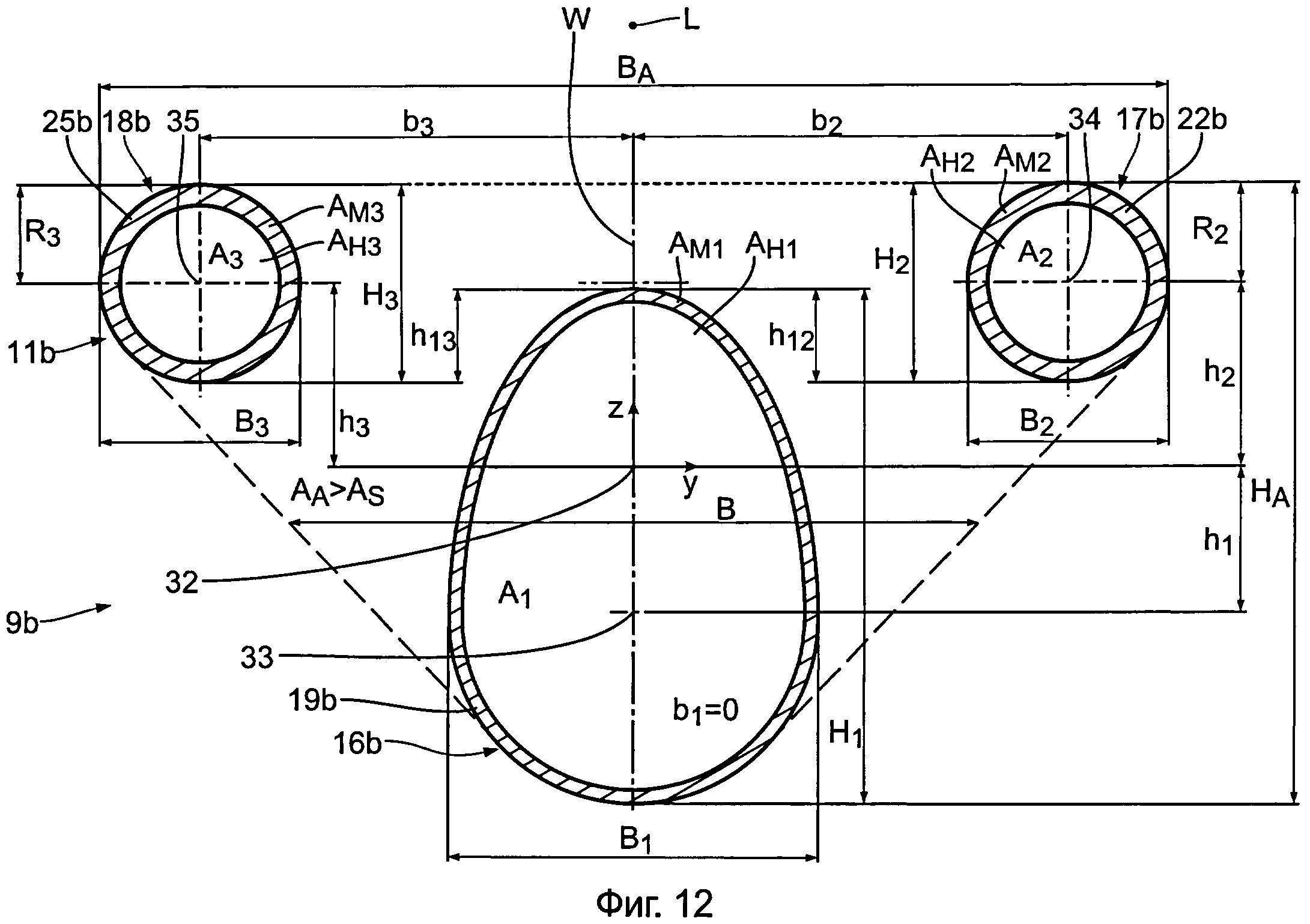
На фиг.12 показан вид в поперечном сечении через крановую стрелу, изображенный на фиг.10, по линии XII-XII.
Подробное описание предлагаемого изобретения
Первый вариант осуществления предлагаемого изобретения далее описан со ссылками на прилагаемые чертежи от фиг.1 до фиг.6. Передвижной телескопический подъемный кран 1 имеет ходовую часть 2, на которой установлена верхняя конструкция 3, имеющая противовес 4. Упомянутая ходовая часть 2 имеет известную в данной области техники конструкцию, будучи выполненной с возможностью передвижения по общественным дорогам. Для этого ходовая часть 2 имеет базовую раму 5, на которой смонтирована совокупность осей 6 с колесами 7 на них, которые выполнены с возможностью приведения их в движение и руления. Упомянутая верхняя конструкция 3 и расположенный на ней противовес 4 установлены на ходовой части 2 с возможностью поворота вокруг оси вращения 8, проходящей перпендикулярно плоскости базовой рамы 5.
На верхней конструкции 3 расположена крановая стрела 9, установленная с возможностью шарнирного поворота с помощью гидравлического цилиндра 10 в рабочей плоскости W (плоскость перемещения груза) и являющаяся выдвижной (телескопической) в продольном направлении L. Для этого крановая стрела 9 имеет три секции 11, 12 и 13, выполненные с возможностью телескопически выдвигаться и втягиваться с помощью гидравлического цилиндра 14 и, таким образом, выполненные с возможностью переводиться из выдвинутого рабочего положение во втянутое транспортировочное положение и обратно. Первая секция 11 крановой стрелы 9 шарнирно соединена с верхней структурой 3 с возможностью поворота вокруг оси поворота 15 на своем конце. Крановая стрела 9 выполнена с возможностью шарнирного поворота в рабочей плоскости W с помощью гидравлического цилиндра 10, который, отходя от верхней конструкции 3, сочленен с секцией 11 крановой стрелы, отстоящей от оси шарнирного поворота 15.
Крановая стрела 9 имеет три ствола: 16, 17 и 18, которые все имеют телескопическое исполнение и содержат по три секции: 19, 20 и 21; 22, 23 и 24; и 25, 26 и 27, соответственно. Гидравлический цилиндр 14 расположен во вмещающем пространстве ствола 16 крановой стрелы 9, который выполнен в виде полого цилиндра, образующего упомянутое вмещающее пространство. Упомянутые стволы 16, 17 и 18 имеют по отношению к продольному направлению L поперечное расположение на расстоянии друг от друга и соединены один с другим с помощью четырех обладающих изгибной жесткостью соединительных элементов 28, 29, 30 и 31. Соединительные элементы 28 и 29 во всяком случае расположены на конце секций 19, 22 и 25 соответствующих стволов крановой стрелы, которые образуют, тем самым, первую секцию 11 крановой стрелы. Соединительный элемент, в свою очередь, расположен на конце секций 20, 23 и 26 соответствующих стволов крановой стрелы на удалении от упомянутой первой секции 11 крановой стрелы, которые образуют, тем самым, вторую секцию 12 крановой стрелы. Соответственно, соединительный элемент 31 расположен на конце секций 21, 24 и 27 соответствующих стволов крановой стрелы на удалении от упомянутой второй секции 12 крановой стрелы, которые образуют, тем самым, третью секцию 13 крановой стрелы.
Крановая стрела 9 по своей конструкции симметрична относительно плоскости W перемещения груза и имеет центральную продольную ось 32, которая называется центроидальной (то есть отнесенной к центру масс или центру тяжести крановой стрелы) осью и расположена в плоскости W перемещения груза. Стволы 16, 17 и 18 крановой стрелы имеют свои центральные продольные оси 33, 34 и 35, соответственно, которые имеют полигональное или треугольное расположение, симметричное относительно плоскости W перемещения груза. В частности, упомянутые стволовые центральные продольные оси 32 и 33 расположены в плоскости W перемещения груза, то есть, на расстоянии b1=0 от нее по перпендикуляру и на расстоянии h1 друг от друга параллельно плоскости W перемещения груза. По сравнению с этим центральные продольные оси 34 и 35 расположены на одинаковых расстояниях b2 и b3 от плоскости W перемещения груза по перпендикуляру. Кроме того, упомянутые центральные продольные оси 34 и 35 находятся на расстояниях h2 и h3 по отношению к центральной продольной оси 32 и параллельно плоскости W перемещения груза.
Нижний ствол 16, расположенный в плоскости W перемещения груза и обращенный к ходовой части 2, образует нижнюю сторону крановой стрелы 9, в то время как верхние стволы 17 и 18, удаленные от ходовой части 2 крана, образуют верхнюю сторону крановой стрелы 9. Крановая стрела 9 в направлении, перпендикулярном плоскости W перемещения груза, имеет ширину B, которая, начиная от нижнего ствола 16, увеличивается в направлении к верхним стволам 17 и 18, достигая максимальной величины BA. Упомянутые выше геометрические параметры показаны на фиг.6.
Секции 19, 20, 21, 22, 23, 24, 25, 26 и 27 стволов крановой стрелы выполнены в виде полых цилиндров круглого сечения. На фиг.6 проиллюстрирована форма поперечного сечения этих стволовых секций 19, 22 и 25 первой секции 11 крановой стрелы 9 и показано положение этих стволовых секций 19, 22 и 25 друг относительно друга и относительно плоскости W перемещения груза. Стволовая секция 19 имеет наружный радиус R1, который больше, чем соответствующий наружный радиус R2 и R3 стволовых секций 22 и 25. Поэтому стволовая секция 19 в направлении, параллельном плоскости W перемещения груза, имеют высоту H1=2×R1, а в направлении, перпендикулярном плоскости W перемещения груза, она имеет ширину В1=2×R1. Поэтому крановая стрела 9 в области ее секции 11 имеет высоту, или максимальную высоту HA, которая образуется суммированием значений R1, R2, h1 и h2. Кроме того, в области ее секции 11 крановая стрела 9 имеет ширину или максимальную ширину BA, которая образуется суммированием значений R2, R3, h2 и h3. Аналогично для секций 12 и 13 крановой стрелы 9, у которых наружные радиусы R1, R2, и R3 соответственно меньше, как это требуется для обеспечения телескопической способности крановой стрелы 9. Для обеспечения возможности телескопического выдвижения и втягивания крановой стрелы 9 соответствующие секции 19, 20, 21, 22, 23, 24, 25, 26 и 27, относящиеся к стволам 16, 17 и 18 крановой стрелы 9, которые являются соседствующими в продольном направлении L, выполнены с возможностью втягивания одна в другую.
Выполняется следующее соотношение между максимальной шириной BA и каждой шириной Bi, где i изменяется от 1 до 3: BA:Bi≥1,5, предпочтительно - BA:Bi≥2, еще более предпочтительно - BA:Bi≥2,5. Кроме того, выполняется следующее соотношение между максимальной высотой НА и каждой высотой Hi, где i изменяется от 1 до 3: HA:Hi≥1,2, предпочтительно - HA:Hi≥1,5, более предпочтительно - HA:Hi≥2, еще более предпочтительно - НА:Hi≥2,5. Аналогично для секций 12 и 13 крановой стрелы 9.
Секции 19, 22 и 29 стволов крановой стрелы, в направлении, перпендикулярном плоскости W перемещения груза, имеют площади стволового поперечного сечения A1, А2 и А3, соответственно, которые в каждом случае получаются из площадей кругов, связанных с упоминавшимися выше наружными радиусами R1, R2, и R3, соответственно. Поэтому площади стволового поперечного сечения Ai в каждом случае содержат площади материального поперечного сечения AMi и площади пустотного поперечного сечения AHi, где пустоты окружены материалом, при этом i изменяется от 1 до 3. Благодаря разнесенному расположению стволовых секций 16, 17 и 18 или стволовых секций 19, 20 и 25, крановая стрела 9 в области стреловой секции 11 имеет площадь поперечного сечения AA, которая больше, чем сумма As площадей стволового поперечного сечения A1, А2 и A3. Площадь поперечного сечения AA показана на фиг.6 в виде области, ограниченной линиями из точек, которые между соседними стволовыми секциями 19, 22 и 25 проходят как касательные. Эти линии из точек вместе со стволовыми секциями 19, 22 и 25 образуют периметр стреловой секции 11. Этим периметром ограничивается площадь поперечного сечения AA. Фигурально выражаясь, периметр области AA поперечного сечения получается при натяжении воображаемого шнура, который туго натянут с охватом стволовых секций 19, 22 и 25. Аналогично для стреловых секций 12 и 13.
Что касается соотношения между площадью поперечного сечения АA и суммарной площадью AS стволовых поперечных сечений A1, А2 и А3, то оно таково, что соблюдается неравенство AA:AS>1, предпочтительно - AA:AS≥1,5, еще более предпочтительно - AA:AS≥2, еще более предпочтительно - AA:AS≥2,5, еще более предпочтительно - AA:AS≥3, и еще более предпочтительно - AA:AS≥4. Аналогично для стреловых секций 12 и 13, при этом следует учесть, что соответствующие стволовые секции 20, 23 и 26 или 21, 24 и 27, из соображений обеспечения телескопической способности, имеют соответственно меньшие радиусы R1, R2 и R3.
При таком решении крановая стрела 9 по сравнению с крановыми стрелами, известными из уровня техники, имеет то преимущество, что она имеет больший момент инерции площади Iz, tot или Iy, tot по отношению к изгибающим силам, действующим перпендикулярно плоскости W перемещения груза и в плоскости W перемещения груза. Момент инерции площади Iz,tot по отношению к изгибающим силам, действующим перпендикулярно плоскости W перемещения груза, иными словами, действующим на изгиб вокруг оси z, определяется по следующей формуле:
 ,
,
где
i - текущий индекс для стволов крановой стрелы,
Iz, i - собственная доля i-того ствола крановой стрелы,
bi - расстояние центроидальной или центральной продольной оси i-того ствола крановой стрелы от центроидальной или центральной продольной оси крановой стрелы в направлении оси у,
AMi - площадь материального поперечного сечения i-того ствола крановой стрелы,
 - доля Штейнера i-того ствола крановой стрелы и
- доля Штейнера i-того ствола крановой стрелы и
n - количество стволов крановой стрелы.
Уравнение (1) применимо также для n=3 и b1=0. Уравнение (1) описывает достижимый момент инерции площади Iz, tot в некоторой идеальной жесткой на изгиб крановой стреле 9. При практическом проектировании размеров крановой стрелы 9 должен приниматься в расчет понижающий коэффициент долей Штейнера α, который зависит от количества соединительных элементов 28, 29, 30 и 31 и от степени их изгибной жесткости.
Соответственно, момент инерции площади Iy, tot по отношению к изгибающим силам, действующим параллельно плоскости W перемещения груза, иными словами, действующим на изгиб вокруг оси у, определяется по следующей формуле:
 ,
,
где
i - текущий индекс для стволов крановой стрелы,
Iy, i - собственная доля i-того ствола крановой стрелы,
hi - расстояние центроидальной или центральной продольной оси i-того ствола крановой стрелы от центроидальной или центральной продольной оси крановой стрелы в направлении оси z,
AMi - площадь материального поперечного сечения i-того ствола крановой стрелы,
 - доля Штейнера i-того ствола крановой стрелы и
- доля Штейнера i-того ствола крановой стрелы и
n - количество стволов крановой стрелы.
Соответственно, в уравнении (2) в долях Штейнера следует учитывать понижающий коэффициент β.
Моменты инерции площади являются мерой жесткости крановой стрелы 9 по отношению к соответствующим изгибающим силам. Благодаря долям Штейнера моменты инерции площади существенно увеличиваются относительно крановых стрел, известных из уровня техники.
Соединительные элементы 28, 29, 30 и 31 по существу выполнены в виде треугольных пластин, каждая из которых имеет два сквозных отверстия 36 и 37 для стволовых секций 22, 23, 24, 25, 26 и 27 стреловых секций 12 и 13. Кроме того, каждый из соединительных элементов 28, 29, 30 и 31 имеет прямоугольное сквозное отверстие 38 для секций 19, 20 и 21 ствола 16, который простирается приблизительно до центральных продольных осей 34 и 35. Поэтому упомянутые сквозные отверстия 38 образуют в соединительных элементах 28, 29, 30 и 31 направляющий канал 39 для проведения поддерживающего троса 52. Упомянутый поддерживающий трос 52 известным способом проводится от свободного конца крановой стрелы 9 до тросовой лебедки 53, которая установлена на верхней конструкции 3 крана. Опорный трос 52 заводится на свободный конец крановой стрелы 9 через два отклоняющих ролика 54 и 55, которые с возможностью вращения установлены на свободном конце крановой стрелы 9 с помощью опорной рамы 56.
Стволы 17 и 18 крановой стрелы выполнены с возможностью смещения относительно ствола 16 крановой стрелы в направлении, параллельном плоскости W перемещения груза. Для этого на конце, обращенном к верхней структуре 3 крана на обеих сторонах стволовой секции 19, жестко зафиксированы и соединены с соединительным элементом 28 два гидравлических цилиндра 40. Соответственно, на конце стволовой секции 19 закреплены два гидравлических цилиндра 41, которые соединены с соединительным элементом 29. Для смещения стволов 17 и 18 крановой стрелы или для блокирования этих стволов 17 и 18 крановой стрелы относительно ствола 16 крановой стрелы предусмотрены блокировочные узлы 42. Два блокировочных узла 42 встроены в стволовые секции 19, 20 и 21 и связанные с ними соединительные элементы 28, 29, 30 и 31. На фиг.2, фиг.3, фиг.4 и фиг.5 в качестве примера показан блокировочный узел 42, связанный со стволовой секцией 19 и с соединительным элементом 29. Упомянутый блокировочный узел 42 имеет два блокировочных канала 43, которые расположены друг напротив друга, открываясь в сквозное отверстие 38 с прохождением плоскости W перемещения груза. Возможность блокирования и разблокирования обеспечивается благодаря предназначенным для этого блокировочным задвижкам 44, которые выполнены с возможностью проведения их через блокировочные каналы 45 стволовой секции 19 и блокировочные каналы 43. Упомянутые блокировочные задвижки 44 могут приводиться в действие, например, гидравлическим, пневматическим или электромеханическим способом.
Крановая стрела 9 может переводиться из транспортировочного положения в рабочее и наоборот с помощью гидравлических цилиндров 40 и 41 и блокировочных узлов 42. В транспортировочном положении площадь поперечного сечения AA или высота HA крановой стрелы 9 уменьшаются по сравнению с рабочим положением, так что передвижной телескопический подъемный кран 1 имеет меньшую общую высоту. Такое уменьшение общей высоты передвижного телескопического подъемного крана 1 необходимо, например, с целью предотвращения превышения максимальной разрешенной высоты при участии в дорожном движении.
Кроме того, блокировочные узлы 42, относящиеся к соединительным элементам 29 и 30, имеют блокировочные каналы 46, сквозь которые тоже могут проводиться блокировочные задвижки 44. Все блокировочные каналы 46 выполнены в соответствующей внутренней стволовой секции 20 или 21, так что в заблокированном состоянии соседствующие в продольном направлении стволовые секции 19 и 20 или 20 и 21 заблокированы в продольном направлении L.
Для блокирования в продольном направлении L предусмотрены также блокировочные узлы 47 и 48, которые расположены в области соединительных элементов 29 и 30. Упомянутые блокировочные узлы 47 и 48 смонтированы или закреплены непосредственно на соответствующем соединительном элементе 29 или 30. Каждый из блокировочных узлов 47 и 48 снабжен блокировочными каналами 49 и 50, которые выполнены в соседствующих в продольном направлении стволовых секциях 22 и 23, 23 и 24, 25 и 26 и 26 и 27. Упомянутые блокировочные каналы 49 и 50 выполнены с возможностью проведения сквозь них соответствующей блокировочной задвижки 51, благодаря чему обеспечивается возможность желаемого механического блокирования стреловых секций 11 и 12 и 12 и 13. В альтернативном варианте, в соответствии с блокировочными узлами 41, может быть предусмотрено две блокировочных задвижки 51, которые расположены друг напротив друга с возможностью смещения относительно предназначенных для них блокировочных каналов 49 и 50. Эти блокировочные задвижки 51 могут приводиться в действие, например, гидравлическим, пневматическим или электромеханическим способом.
На фиг.1 и фиг.2 проиллюстрирован передвижной телескопический подъемный кран 1 в положении, готовом для транспортировки. Крановая стрела 9 полностью втянута, находясь в транспортировочном положении. Блокировочные узлы 42, 47 и 48 находятся в разблокированном состоянии, и стволовые секции 11, 12 и 13 телескопически сложены. Кроме того, стволы 17 и 18 приведены в полностью нижнее положение с помощью гидравлических цилиндров 40 и 41, так что ствол 16 полностью располагается в сквозных отверстиях 38. В таком состоянии передвижной телескопический подъемный кран 1 имеет наименьшую возможную общую высоту, так что при участии в дорожном движении максимально разрешенная высота передвижного телескопического подъемного крана 1 не оказывается превышенной. На фиг.2 проиллюстрировано транспортировочное положение крановой стрелы 9 на поперечном сечении через соединительный элемент 29.
На фиг.3 передвижной телескопический подъемный кран 1 показан с крановой стрелой 9, которая приведена в телескопически втянутое рабочее положение. Стволы 17 и 18 и соединительные элементы 28, 29, 30 и 31 с помощью подъемных цилиндров 40 и 41 выдвинуты относительно ствола 16 в направлении, параллельном плоскости W перемещения груза. Затем осуществляется блокирование блокировочных узлов 42, относящихся к соединительным элементам 28 и 31.
После этого крановая стрела 9 с помощью гидравлического цилиндра 10 приводится в поднятое положение в плоскости W перемещения груза и с помощью гидравлического цилиндра 14 телескопически выдвигается. На фиг.4 передвижной телескопический подъемный кран 1 проиллюстрирован в рабочем положении с полностью поднятой и телескопически выдвинутой крановой стрелой 9. В этом состоянии блокировочные узлы 42, 47 и 48, относящиеся к соединительным элементам 29 и 30, также заблокированы, благодаря чему крановая стрела 9 имеет очень высокую степень жесткости. На фиг.5 показано поперечное сечение через блокировочные узлы 47 и 48, соседствующие с соединительным элементом 29.
Благодаря большим значениям моментов инерции площади крановая стрела 9 согласно предлагаемому изобретению имеет высокую степень жесткости по отношению к изгибающим силам, действующим перпендикулярно и параллельно плоскости W перемещения груза. В результате обеспечивается существенное повышение рабочей нагрузки, отнесенной к весу крановой стрелы 9. В частности, крановая стрела 9 даже без увеличения веса или только с незначительным увеличением веса по сравнению с известными крановыми стрелами обеспечивает значительно увеличенную рабочую нагрузку, которая приблизительно соответствует рабочей нагрузке известной крановой стрелы с анкерными опорами. При этом по сравнению с известной крановой стрелой с анкерными опорами отпадает необходимость в отдельной транспортировке и трудоемких операциях сборки.
Далее со ссылками на фиг.7 описывается второй вариант осуществления предлагаемого изобретения. В отличие от рассмотренного выше первого варианта осуществления предлагаемого изобретения, стволы 17а и 18а с помощью соединительных элементов 28а, 29а, 30а и 31а жестко закреплены на стволе 16а без возможности смещения относительно последнего. Если в результате не превышается максимально допустимая высота передвижного телескопического подъемного крана, то при таком решении упрощается конструкция крановой стрелы 9а. Поскольку соединительные элементы 28а, 29а, 30а и 31а закреплены на стволе 16а жестко, можно обойтись без блокировочных каналов 43. В остальном конструкция и работа передвижного телескопического подъемного крана 1а совпадает с тем, что описывалось для первого варианта осуществления предлагаемого изобретения.
Далее со ссылками на фиг.8-фиг.12 описан третий вариант осуществления предлагаемого изобретения. В отличие от вариантов осуществления предлагаемого изобретения, рассмотренных выше, передвижной телескопический подъемный кран 1b имеет крановую стрелу 19b с тремя стволами 16b, 17b и 18b, при этом ствол 16b расположен в плоскости W перемещения груза и имеет поперечное сечение овальной формы. Соответственно, соединительные элементы 28b, 29b, 30b и 31b имеют сквозные отверстия 38b овальной формы. Направляющий канал 39b для поддерживающего троса 52 выполнен в соединительных элементах 28b, 29b, 30b и 31b выше ствола 16b. Центральная продольная ось 33 ствола 16b проходит в точке пересечения максимальной высоты H1 и максимальной ширины B1 ствола 16b.
Ствол 16b, расположенный в плоскости W перемещения груза в направлении, перпендикулярном плоскости W перемещения груза, имеет максимальную ширину B1, а в направлении плоскости W перемещения груза имеет максимальную высоту H1, при этом соблюдается неравенство H1:B1>1, предпочтительно - H1:B1≥1,2, более предпочтительно - H1:B1≥1,5. В направлении плоскости W перемещения груза ствол 16b перекрывается со стволами 17b и 18b при величине перекрытия h12 или h13, при этом h12=h13. Кроме того, соблюдаются соотношения h12<R2 и h13<R3. Площадь A1 стволового поперечного сечения во всех случаях больше, чем площади А2 и А3 стволовых поперечных сечений. Представляется предпочтительным такое решение, при котором A1:А2≥1,5, более предпочтительно - A1:А2≥2, еще более предпочтительно - A1:А2≥2,5. То же относится к отношению A1:A3. В области стреловой секции 11b крановая стрела 9b имеет максимальную высоту HA, которая складывается из H1 и R2 за вычетом перекрывания h12. Кроме того, в области стреловой секции 11b крановая стрела 9b имеет максимальную ширину BA, которая складывается из R2, R3, b2 и b3. Аналогично для стреловых секций 12b и 13b, при этом ввиду телескопической конструкции крановой стрелы 9b внешние радиусы R2 и R3 и максимальная высота H1, а также величина перекрывания h12 соответственно меньше.
Стволы 17b и 18b, соответствующие второму варианту осуществления предлагаемого изобретения, установлены на фиксированном расстоянии от ствола 16b. В альтернативном варианте стволы 17b и 18b, соответствующие первому варианту осуществления предлагаемого изобретения, установлены с возможностью смещения относительно ствола 16b. Внутри ствола 16b установлен гидравлический цилиндр 14, обеспечивающий телескопическое выдвижение и втягивание крановой стрелы 9b.
Блокировочные узлы 47b и 48b прикреплены непосредственно к соединительным элементам 29b и 30b, так что обеспечивается возможность механического блокирования на конце соседствующих в продольном направлении стволовых секций 22b и 23b, 23b и 24b, 25b и 26b и 26b и 27b друг относительно друга. Каждый из упомянутых блокировочных узлов 47b и 48b снабжен двумя расположенными друг напротив друга блокировочными задвижками 51b, выполненными с возможностью проведения их сквозь соответствующие предназначенные для них блокировочные каналы 49 и 50. Блокировочные задвижки 51b могут приводиться в действие, например, гидравлическим, пневматическим или электромеханическим способом.
Крановая стрела 9b имеет высокую степень изгибной жесткости по отношению как к изгибающим силам, действующим в плоскости W перемещения груза, так и к изгибающим силам, действующим перпендикулярно плоскости W перемещения груза. Благодаря овальной форме поперечного сечения ствола 16b и его площади A1 стволового поперечного сечения обеспечивается, в частности, его способность демпфировать значительные изгибающие силы, действующие в плоскости W перемещения груза. В остальном конструкция и принцип действия передвижного телескопического крана 1b совпадают с тем, что уже описывалось выше.
Признаки описанных выше крановых стрел 9, 9а и 9b могут комбинироваться любым образом с образованием крановой стрелы согласно предлагаемому изобретению. Помимо простого увеличения рабочей нагрузки путем увеличения моментов инерции площади, крановые стрелы 9, 9а и 9b согласно предлагаемому изобретению имеют и другие преимущества по сравнению с известной крановой стрелой с анкерными опорами. Крановые стрелы 9, 9а и 9b согласно предлагаемому изобретению в каждой стреловой секции 11, 12, 13; 11а, 12а, 13а и 11b, 12b 13b, соответственно, по отношению к действующим на них изгибающим силам могут оптимизироваться отдельно, и эти силы, таким образом, демпфируются на всем протяжении крановой стрелы 9, 9а или 9b, а не только на конце крановой стрелы. Кроме того, как перевод крановой стрелы 9, 9а или 9b в рабочее положение, так и ее работа чрезвычайно просты. В частности, нет необходимости в трудоемком управлении силами предварительного натяжения анкерных тросов, поэтому работа крана упрощается с одновременным повышением надежности, так как не возникает угрозы ошибки в управлении предварительным натяжением анкерных тросов. Выбором количества стволов 16, 17, 18; 16а, 17а, 18а; 16b, 17b, 18b и их расположением и расстояниями друг от друга обеспечивается возможность оптимизации большого количества параметров, при этом определяется площадь AA поперечного сечения, и выбором формы поперечного сечения и площадей Ai стволовых поперечных сечений обеспечивается возможность оптимизации являющейся предметом предлагаемого изобретения крановой стрелы 9, 9а или 9b в отношении демпфирования изгибающих сил, действующих перпендикулярно плоскости W перемещения груза и в плоскости W перемещения груза в отношении веса. В целом, крановая стрела 9, 9а или 9b согласно предлагаемому изобретению обеспечивает возможность существенно увеличить рабочую нагрузку при данном весе по сравнению с известными крановыми стрелами. В частности, при той же самой рабочей нагрузке обеспечивается возможность существенно облегчить работу с крановой стрелой 9, 9а или 9b при транспортировке и сборке или при переводе в рабочее положение по сравнению с известной крановой стрелой с анкерными опорами.
Передвижной телескопический подъемный кран
Система щеточных уплотнений
Передвижной телескопический подъемный кран
Система щеточных уплотнений

