Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ ОГНЁМ
Вид РИД
Изобретение
Изобретение относится к области бронетанковой техники, в частности к системам управления огнем, обеспечивающим наблюдение поля боя и управление вооружением.
Известны системы стабилизации линии визирования, например, по патенту РФ №2102785, МПК G02B 27/64, опубликованному 20.01.98 г., в котором обеспечивается стабилизация поля зрения и управление линией визирования оптических приборов в вертикальной и горизонтальной плоскостях. Система стабилизации линии визирования содержит корпус, платформу с вертикальной осью, размещенную в подшипниках корпуса, зеркальный отражатель с горизонтальной осью, размещенный в подшипниках платформы, одноосный гироскопический стабилизатор (ОГС) с контуром управления, выходная ось которого размещена в подшипниках платформы и кинематически связана передачей в соотношении 2:1 с горизонтальной осью зеркального отражателя, датчик угла, кинематически связанный с горизонтальной осью зеркального отражателя, компенсатор перекрестной связи (КПС), вход которого соединен с выходом датчика угла, исполнительный двигатель, установленный по вертикальной оси платформы, первое усилительно-корректирующее устройство (УКУ), выход которого подключен к исполнительному двигателю, сумматор, первый вход которого соединен с выходом КПС, а выход соединен с входом первого УКУ, второе УКУ, выход которого подключен к входу контура управления ОГС, гироскоп с внутренним карданным подвесом (ГВК), жестко связанный с выходной осью ОГС и установленный так, что оси чувствительности расположены соосно с осью платформы и с горизонтальной осью зеркального отражателя, а первый и второй выходы ГВК соответственно подключены к второму УКУ и второму входу сумматора. Однако в данной системе для осуществления стабилизации линии визирования по двум плоскостям требуется использование двух гироскопов, что ведет к увеличению массы, габаритов и сложности системы управления.
Наиболее близкой по техническим характеристикам является система управления огнем, предложенная в патенте РФ №2187060, МПК F41G 5/14, опубликованном 10.08.2000 г. Система управления огнем боевой машины содержит установленный в башне первый прицел с двухстепенной стабилизацией поля зрения, включающий первый датчик угла, кинематически связанный с горизонтальным зеркалом, второй датчик угла, ротор которого связан с вертикальным зеркалом, а статор через первый механизм передачи кинематически связан с осью качания орудия, закрепленного в цапфенных узлах башни, датчик положения, связанный с осью качания орудия вторым механизмом передачи, кинематически связанный с осью качания орудия привод вертикального наведения, вход которого соединен с выходом второго датчика угла, закрепленный в корпусе машины и кинематически связанный с башней привод горизонтального наведения, вход которого соединен с выходом первого датчика угла, установленный в башне второй прицел, включающий платформу с вертикальной осью, размещенную в подшипниках во втором прицеле, зеркальный отражатель с горизонтальной осью, размещенной в подшипниках платформы, двухосный гироскопический стабилизатор, выходная ось которого размещена в подшипниках платформы и кинематически связана передачей 2:1 с горизонтальной осью зеркального отражателя, кинематически связанный с вертикальной осью платформы регулятором, вход которого соединен с выходом двухосного гироскопического стабилизатора, третий и четвертый датчики угла, кинематически связанные соответственно с горизонтальной осью зеркального отражателя и вертикальной осью платформы. Система позволяет объединить дневной и ночной прицелы с независимой стабилизацией поля зрения в двух плоскостях и обеспечить совмещение и синхронное управление линиями визирования прицелов. Однако у данной системы имеется температурная погрешность, определяемая смещением нулевых точек третьего и четвертого датчиков угла при изменении температуры.
Задачей изобретения является расширение возможностей контроля и настройки системы за счет цифровой обработки сигналов управления и реализации вычислительно сложных алгоритмов коррекции в цифровом виде.
Технический результат - снижение уровня шумов при работе системы, снижение погрешности, совмещения и синхронного слижения линий визирования, а также повышение точностных характеристик и расширение функциональных возможностей.
Это достигается тем, что в систему управления огнем боевой машины, содержащую установленный в башне боевой машины первый прицел с двухстепенной стабилизацией поля зрения, включающий первый датчик угла, кинематически связанный с горизонтальным зеркалом, а также второй датчик угла, ротор которого связан с вертикальным зеркалом, а статор через первый механизм передачи кинематически связан с осью качания орудия, закрепленного в цапфенных узлах башни; датчик положения, связанный с осью качания орудия вторым механизмом передачи; кинематически связанный с осью качания орудия привод вертикального наведения, вход которого соединен с выходом второго датчика угла; закрепленный в корпусе машины и кинематически связанный с башней привод горизонтального наведения, вход которого соединен с выходом первого датчика угла; установленный в башне второй прицел, включающий платформу с вертикальной осью, размещенную в подшипниках во втором прицеле, зеркальный отражатель с горизонтальной осью, размещенной в подшипниках платформы, двухосный гироскопический стабилизатор, выходная ось которого размещена в подшипниках платформы и кинематически связана передачей 2:1 с горизонтальной осью зеркального отражателя, кинематически связанный с вертикальной осью платформы регулятором, вход которого соединен с выходом двухосного гироскопического стабилизатора, третий и четвертый датчики угла, кинематически связанные соответственно с горизонтальной осью зеркального отражателя и вертикальной осью платформы, в отличие от известного, дополнительно введены: двухканальный цифроаналоговый преобразователь, первый и второй выходы которого соединены соответственно с первым и вторым входами двухосного гироскопического стабилизатора; контроллер, выход которого соединен со входом двухканального цифроаналогового преобразователя; многоканальный аналого-цифровой преобразователь, первый, второй, третий, четвертый, пятый, шестой и седьмой входы которого соединены соответственно с первым выходом третьего датчика угла, первым выходом четвертого датчика угла, выходом первого датчика угла, выходом второго датчика угла, выходом датчика положения, вторым выходом третьего датчика угла, вторым выходом четвертого датчика угла, а выход соединен с контроллером, в котором реализован алгоритм, обеспечивающий температурную компенсацию смещения нулевых точек датчиков угла, а также компенсацию кинематических погрешностей совмещения линий визирования двух прицелов и фильтрацию сигналов.
Изобретение поясняется фигурой.
Система управления огнем (СУО) содержит первый 1 и второй 2 прицелы, установленные на башне 3, орудие 4, датчик положения 5, первый 6 и второй 7 механизмы передачи, привод вертикального наведения (ВН) 8, привод горизонтального наведения (ГН) 9, многоканальный аналого-цифровой преобразователь 10, контроллер 11 и двухканальный цифроаналоговый преобразователь 12. Первый прицел 1 имеет первый датчик угла (ДУ) 13, кинематически связанный с горизонтальным зеркалом (на фиг. не показано), и второй ДУ 14, ротор которого кинематически связан с вертикальным зеркалом (на фиг. не показано), а статор через первый механизм передачи 6 кинематически связан с осью качания орудия 4, закрепленного в цапфенных узлах башни 3. На башне 3 установлен датчик положения 5, кинематически связанный вторым механизмом передачи 7 с осью качания орудия 4. С осью качания орудия 4 кинематически связан также привод ВН 8, вход которого соединен с выходом второго ДУ 14. В корпусе 15 машины закреплен и кинематически связан с башней 3 привод ГН 9, вход которого соединен с выходом первого ДУ 13. Второй прицел 2 включает платформу 16 с вертикальной осью, размещенную в подшипниках прицела, зеркальный отражатель 17 с горизонтальной осью, размещенной в подшипниках платформы 16, двухосный гироскопический стабилизатор (ДГС) 18, выходная ось которого размещена в подшипниках платформы 16 и кинематически связана передачей 2:1 с горизонтальной осью зеркального отражателя 17, кинематически связанный с вертикальной осью платформы 16 регулятор 19, вход которого соединен с выходом ДГС 18, третий 20 и четвертый 21 датчики угла (ДУ), кинематически связанные соответственно с горизонтальной осью зеркального отражателя 17 и вертикальной осью платформы 16, многоканальный аналого-цифровой преобразователь (АЦП) 10, первый, второй, третий, четвертый, пятый шестой и седьмой входы которого соединены соответственно с первым выходом третьего ДУ 20, первым выходом четвертого ДУ 21, выходом первого ДУ 13, выходом второго ДУ 14, выходом датчика положения 5, вторым выходом третьего ДУ 20 и вторым выходом четвертого ДУ 21, а выход соединен с входом контроллера 11. Вход двухканального цифроаналогового преобразователя (ЦАП) 12 соединен с выходом контроллера 11, а первый и второй выходы соединены с первым и вторым входом ДГС 18 соответственно. Первый прицел 1 предназначен для стабилизации поля зрения в плоскости ВН и ГН и управления линией визирования (прицеливания) в двух плоскостях. Первый ДУ 13 выдает сигнал, пропорциональный углу поворота линии визирования (прицеливания) относительно башни 3 в плоскости ГН, второй ДУ 14 выдает сигнал, пропорциональный углу поворота линии визирования относительно орудия в плоскости ВН. В качестве первого прицела используется прицел 1 Г46. Второй прицел 2 предназначен для стабилизации поля зрения в плоскости ВН и ГН и обеспечивает синхронное слежение линии визирования за линией визирования первого прицела 1.
Работает система управления огнем следующим образом.
Сигналы с третьего ДУ 20, четвертого ДУ 21 и датчика положения 5 преобразуются с помощью АЦП 10 в цифровой код и используются в контроллере 11 для определения текущего положения линии визирования второго прицела 2 относительно башни 3 по ГН и относительно орудия 4 по ВН с учетом температурных поправок на смещение нулевых точек датчиков угла и поправок, компенсирующих кинематические погрешности системы, и вычисляемых контроллером с учетом сигнала датчика положения 5 и запомненных в контроллере коэффициентов коррекции. Температура датчиков угла контролируется в системе путем измерения напряжения с косинусной обмотки (в случае применения в качестве датчика угла синусно-косинусного вращающегося трансформатора) или напряжения на обмотке возбуждения (при использовании линейного датчика угла с токовой запиткой). Коэффициенты коррекции смещения нуля датчиков угла от изменения температуры определяются при настройке системы.
Сигналы с первого ДУ 13 и второго ДУ 14 преобразуются с помощью АЦП 10 в цифровой код и используются для определения текущего положения линии визирования прицела 1 относительно башни 3 по ГН и орудия по ВН. Контроллер 11 вычисляет рассогласование между положением линий визирования первого 1 и второго 2 прицелов, выполняет фильтрацию и коррекцию разностных сигналов и формирует управляющее воздействие, подаваемое через ЦАП 12 на ДГС 18. ДГС 18 отрабатывает поступающее на него управляющее воздействие и сводит рассогласование между положениями линий визирования первого 1 и второго 2 прицелов к нулю.
Таким образом, использование контроллера для реализации алгоритма коррекции позволяет снизить погрешности, связанные с температурной нестабильностью датчиков угла, устранить погрешности, связанные с неточной установкой прицелов в башне из-за непараллельности посадочных поверхностей, а также скомпенсировать кинематические погрешности механизмов передачи угла.
Система управления огнем боевой машины, содержащая установленный в башне боевой машины первый прицел с двухстепенной стабилизацией поля зрения, включающий первый датчик угла, кинематически связанный с горизонтальным зеркалом, а также второй датчик угла, ротор которого связан с вертикальным зеркалом, а статор через первый механизм передачи кинематически связан с осью качания орудия, закрепленного в цапфенных узлах башни, датчик положения, связанный с осью качания орудия вторым механизмом передачи, кинематически связанный с осью качания орудия привод вертикального наведения, вход которого соединен с выходом второго датчика угла, закрепленный в корпусе машины и кинематически связанный с башней привод горизонтального наведения, вход которого соединен с выходом первого датчика угла, установленный в башне второй прицел, включающий платформу с вертикальной осью, размещенную в подшипниках во втором прицеле, зеркальный отражатель с горизонтальной осью, размещенной в подшипниках платформы, двухосный гироскопический стабилизатор, выходная ось которого размещена в подшипниках платформы и кинематически связана передачей 2:1 с горизонтальной осью зеркального отражателя, кинематически связанный с вертикальной осью платформы регулятором, вход которого соединен с выходом двухосного гироскопического стабилизатора, третий и четвертый датчики угла, кинематически связанные соответственно с горизонтальной осью зеркального отражателя и вертикальной осью платформы, отличающаяся тем, что система управления огнем боевой машины снабжена двухканальным цифро-аналоговым преобразователем, первый и второй выходы которого соединены соответственно с первым и вторым входом двухосного гироскопического стабилизатора, контроллером, выход которого соединен с входом двухканального цифро-аналогового преобразователя, многоканальным аналого-цифровым преобразователем, первый, второй, третий, четвертый, пятый, шестой и седьмой входы которого соединены соответственно с первым выходом третьего датчика угла, первым выходом четвертого датчика угла, выходом первого датчика угла, выходом второго датчика угла, выходом датчика положения, вторым выходом третьего датчика угла и вторым выходом четвертого датчика угла, а выход соединен с контроллером, в котором реализован алгоритм, обеспечивающий температурную компенсацию смещения нулевых точек датчиков угла, а также компенсацию кинематических погрешностей совмещения линий визирования двух прицелов и фильтрацию сигналов.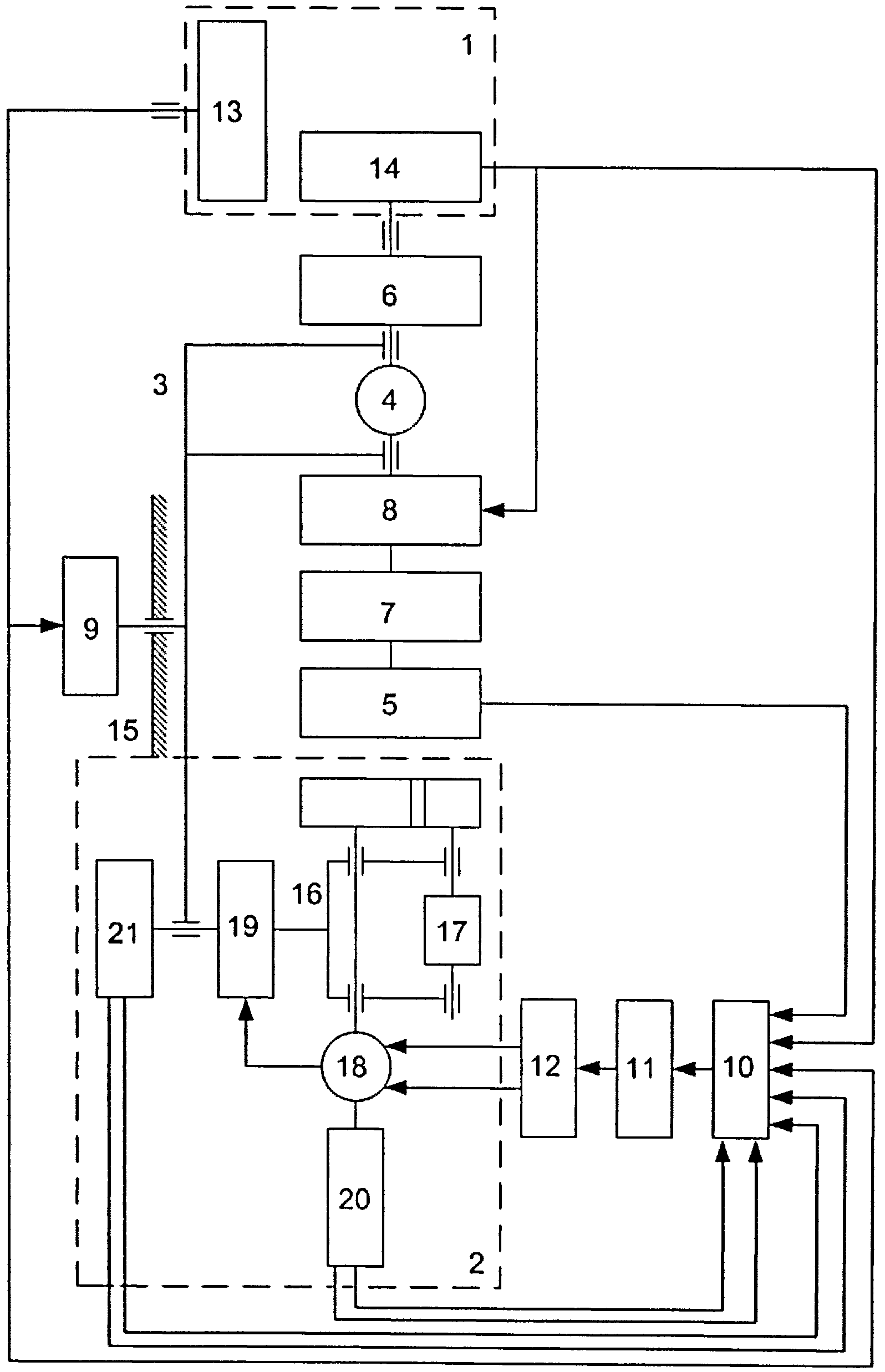
Светосильный объектив
Лазерный дальномер
Перебазируемый телескоп с защитным укрытием
Аппарат аэрофототелевизионный
Двухлинзовый объектив
Светосильный объектив для ближней ик-области спектра
Наблюдательный прибор со стабилизацией и цифровой фоторегистрацией
Зеркально-линзовый объектив (варианты)
Объектив типа гаусса
Оптический прицел
Светосильный объектив
Датчик ветра, давления и температуры

