Результат интеллектуальной деятельности: РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС РАЗВЕДКИ И ОГНЕВОЙ ПОДДЕРЖКИ
Вид РИД
Изобретение
Изобретение относится к военной и специальной технике, а именно к робототехническим комплексам, предназначенным для ведения дистанционной работы в боевых условиях: сбора и передачи разведывательной информации, огневого прикрытия, обнаружения и огневого поражения различного вида целей.
Известен дистанционно управляемый мобильный робот, видеокамера мобильного робота, звукоприемная система самонаведения мобильного робота, сферическая граната (патент RU №2473863 C1, F41Η 7/00, F42B 12/00, F41C 27/06, 27.01.2013 г.), принятый за прототип. Изобретение относится к беспилотным бронированным, оснащенным вооружением транспортным средствам и предназначено для осуществления военных или полицейских задач. Дистанционно управляемый мобильный робот содержит бронированный корпус из керамических пластин с поворотной башенной установкой, ходовую систему с электромоторами-колесами, аккумуляторную систему, дизель-генератор или двигатель внутреннего сгорания, панорамно расположенные на корпусе и на башне видеокамеры, звукоприемную систему самонаведения, блоки управления. Ходовая система содержит телескопические стойки электромоторов-колес, содержащие электромоторы. Кожух видеокамеры содержит защитные передвижные бронированные шторки, механизм замены стекла объектива.
Недостатками прототипа являются:
- недостаточная проходимость шасси комплекса;
- сложность конструкции дистанционно управляемого мобильного робота;
- ограниченные возможности боевого применения;
- отсутствие системы навигации и ориентирования;
- ограниченные функциональные возможности основных систем мобильного робота, обеспечивающих его управляемость, ориентацию в пространстве, информационный обмен, предупреждение столкновений.
Предлагаемым изобретением решается задача по повышению эффективности и надежности универсальных подвижных роботизированных комплексов вооружений.
Технический результат, получаемый при осуществлении изобретения, заключается в создании робототехнического комплекса разведки и огневой поддержки, обеспечивающего ведение войсковой и артиллерийской разведки, огневую поддержку войсковых подразделений, охрану и оборону военных объектов, мест дислокации, выполнение боевых задач в любых погодных условиях, в дневное и ночное время, в различных температурных средах, движение в городских условиях, по бездорожью за счет выбора оптимального типа шасси, системы управления, центрального вычислителя, системы навигации и ориентирования, разведывательно-боевого модуля.
Указанный технический результат достигается тем, что в предлагаемом робототехническом комплексе разведки и огневой поддержки, содержащем бронированное, оснащенное вооружением, поворотной установкой и ходовой системой транспортное средство, аккумуляторную систему, силовую установку в виде дизель-генератора, систему наведения, систему управления, новым является то, что робототехнический комплекс построен по модульному принципу и содержит следующие функционально законченные модули: платформу, представляющую собой базовое шасси с системой управления движением, средствами связи, пунктом дистанционного управления и системой электропитания, навесное оборудование: боевой модуль с комплектом вооружения и пунктом дистанционного управления, разведывательный модуль, составные части комплекса выполнены с возможностью реализации задач по назначению самостоятельно, шасси выполнено в гусеничном варианте с возможностью передвижения в городских условиях, по пересеченной местности, преодоления препятствий, разворота на 360 град. на месте, с возможностью обеспечения максимальной скорости передвижения до 25 км/ч, корпус шасси - несущий, сварной из броневых стальных листов, система управления платформой дополнительно оснащена системой топопривязки и ориентирования, выполненной с возможностью начального определения координат с помощью аппаратуры спутниковой навигации, определения азимута продольной оси шасси, выставки известного азимута, непрерывного расчета координат местоположения и углов крена, тангажа, азимута, система электропитания робототехнического комплекса имеет два номинала напряжения для силовой установки движителя и бортовая сеть питания аппаратуры и навесного оборудования, для каждого номинала напряжения предусмотрена литий-железофосфатная аккумуляторная батарея, система электропитания оснащена микропроцессорным блоком контроля заряда, выполненным с возможностью регулирования, контроля зарядного тока, а также контроля и устранения дисбаланса заряда каждого элемента аккумуляторной батареи, роботизированный комплекс дополнительно оснащен системой предупреждения столкновений, принцип действия которой основан на обработке сигналов с ультразвуковых датчиков.
Построение робототехнического комплекса на основе функционально законченных модулей позволяет:
- без значительных материальных и временных затрат производить модификацию робототехнического комплекса;
- улучшать тактико-технические характеристики.
Выполнение составных частей комплекса с возможностью самостоятельной реализации задач по назначению позволяет:
- обеспечить выполнение узконаправленных задач по назначению;
- повысить живучесть изделия.
Выполнение шасси в гусеничном варианте с возможностью передвижения в городских условиях, по пересеченной местности, преодоления препятствий, разворота на 360 град. на месте, с возможностью обеспечения максимальной скорости передвижения до 25 км/ч позволяет:
- обеспечить высокую проходимость и устойчивость шасси;
- обеспечить передвижение в городских условиях по бетонным, асфальтовым, мраморным, деревянным, плотным грунтовым и песчаным площадкам;
- обеспечить передвижение по пересеченной местности по твердым почвам, в гололедицу, по опавшим листьям, по траве высотой до 1 м, снегу глубиной до 300 мм, в дождь, по залитым водой поверхностям глубиной до 300 мм;
- обеспечить преодоление препятствий: пороги до 200 мм, косогоры по курсу с углом до 30 град., склонов в поперечном направлении с углом до 30 град.
Выполнение корпуса шасси несущим, сварным из броневых стальных листов позволяет:
- обеспечить защиту аппаратуры от огневого и осколочного поражения;
- обеспечить необходимую жесткость и поотсековое размещение оборудования.
Оснащение системы управления платформой системой топопривязки и ориентирования позволяет:
- определять географические координаты, угловое положение в пространстве комплекса;
- обеспечить режим комплексированного определения координат с использованием одометрической навигации и информации от спутниковых систем;
- обеспечить аварийный режим определения координат только по данным от аппаратуры спутниковой навигации или только в одометрическом режиме.
Использование в системе электропитания робототехнического комплекса двух номиналов напряжения для силовой установки движителя и бортовой сети позволяет:
- улучшить помехозащищенность при эксплуатации комплекса;
- оптимизировать работу оборудования в зависимости от функционального назначения и потребляемой мощности.
Использование для каждого номинала напряжения литий-железофосфатных аккумуляторных батарей позволяет:
- за счет блочного построения батарей обеспечить номиналы напряжений 72 В и 24 В;
- обеспечить срок службы батарей не менее 1000 циклов заряд/разряд.
Оснащение системы электропитания микропроцессорным блоком контроля заряда позволяет:
- обеспечить регулирование, контроль зарядного тока, а также контроль и устранение дисбаланса заряда каждого элемента батареи;
- устранить вероятность выхода из строя отдельных элементов батареи и обеспечить их равномерное старение.
Оснащение роботизированного комплекса системой предупреждения столкновений позволяет обеспечить своевременное обнаружение объектов, препятствующих движению комплекса.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
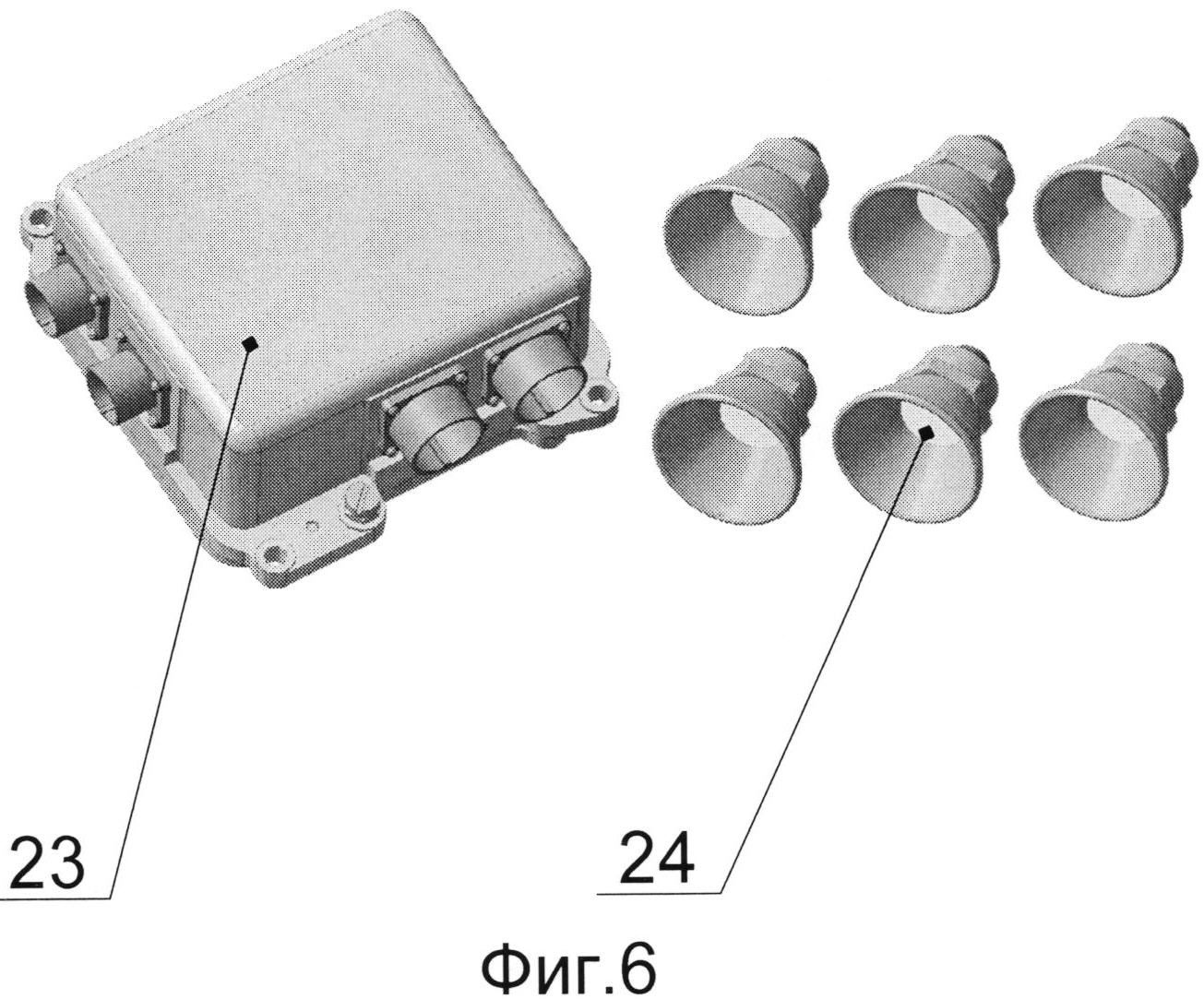
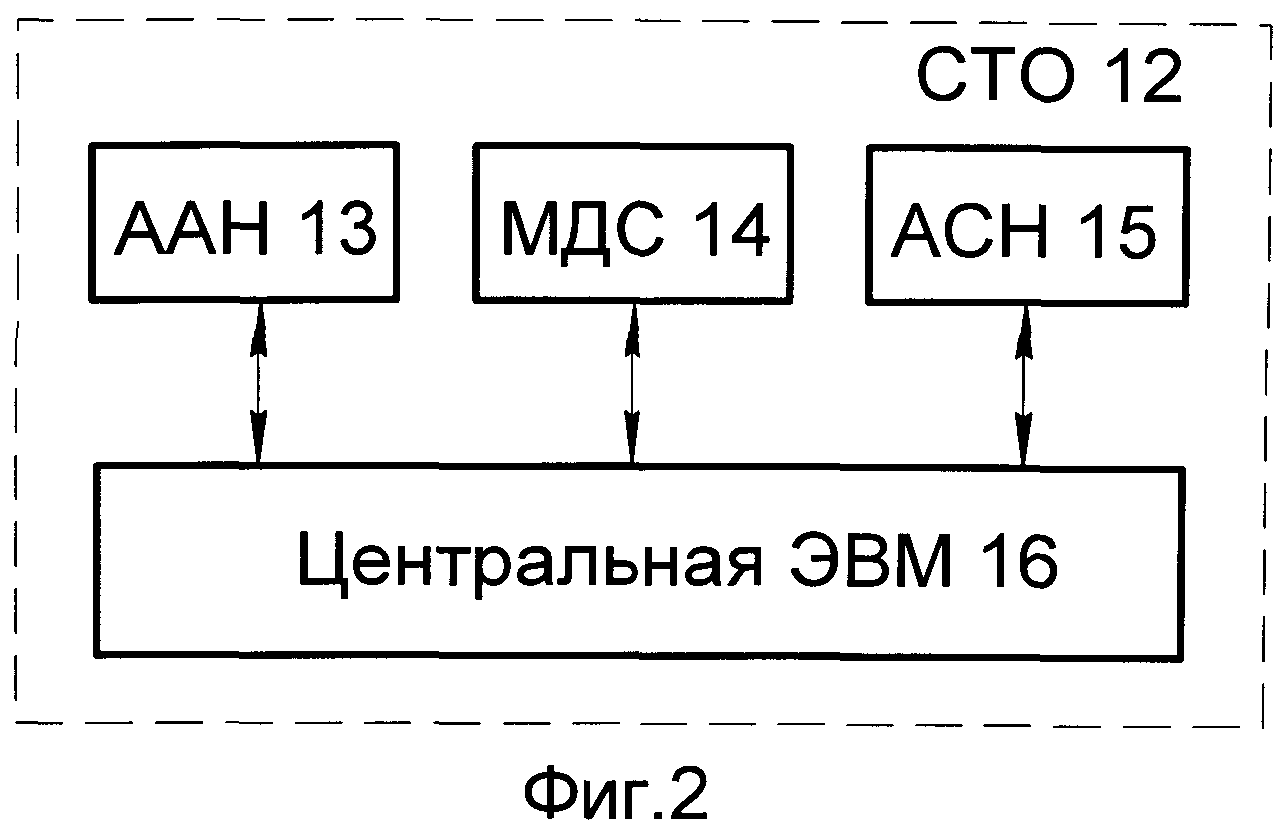
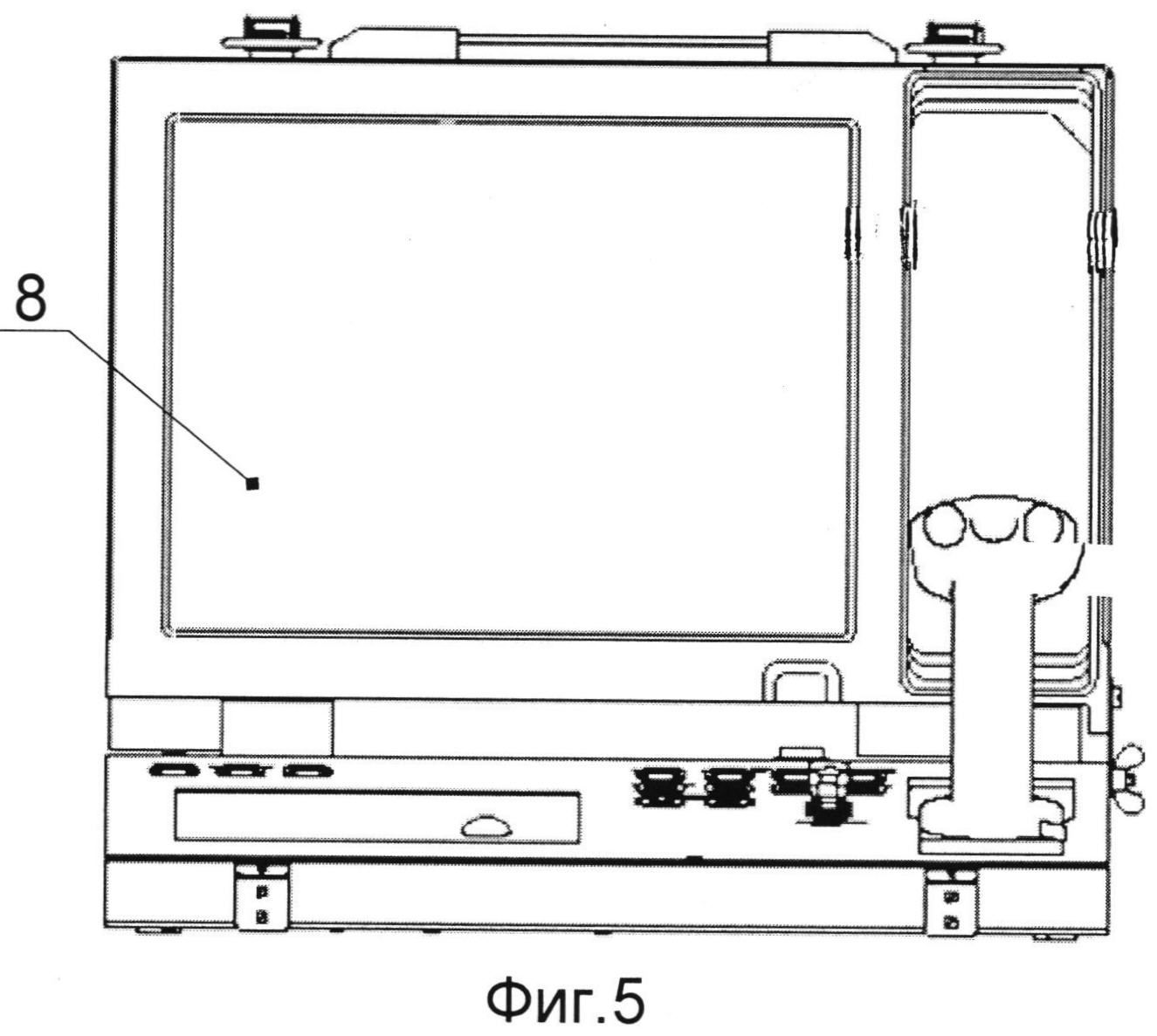
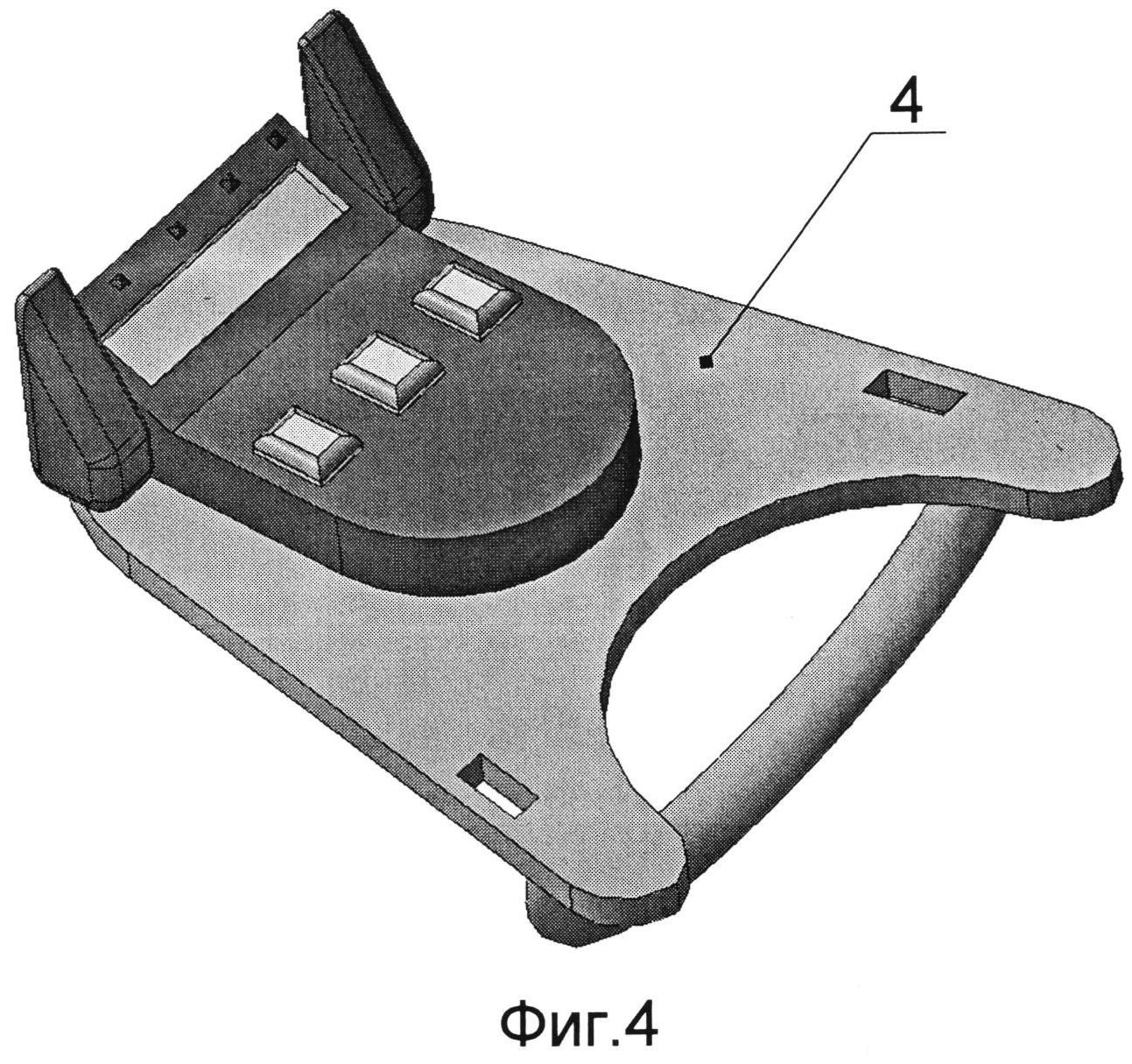
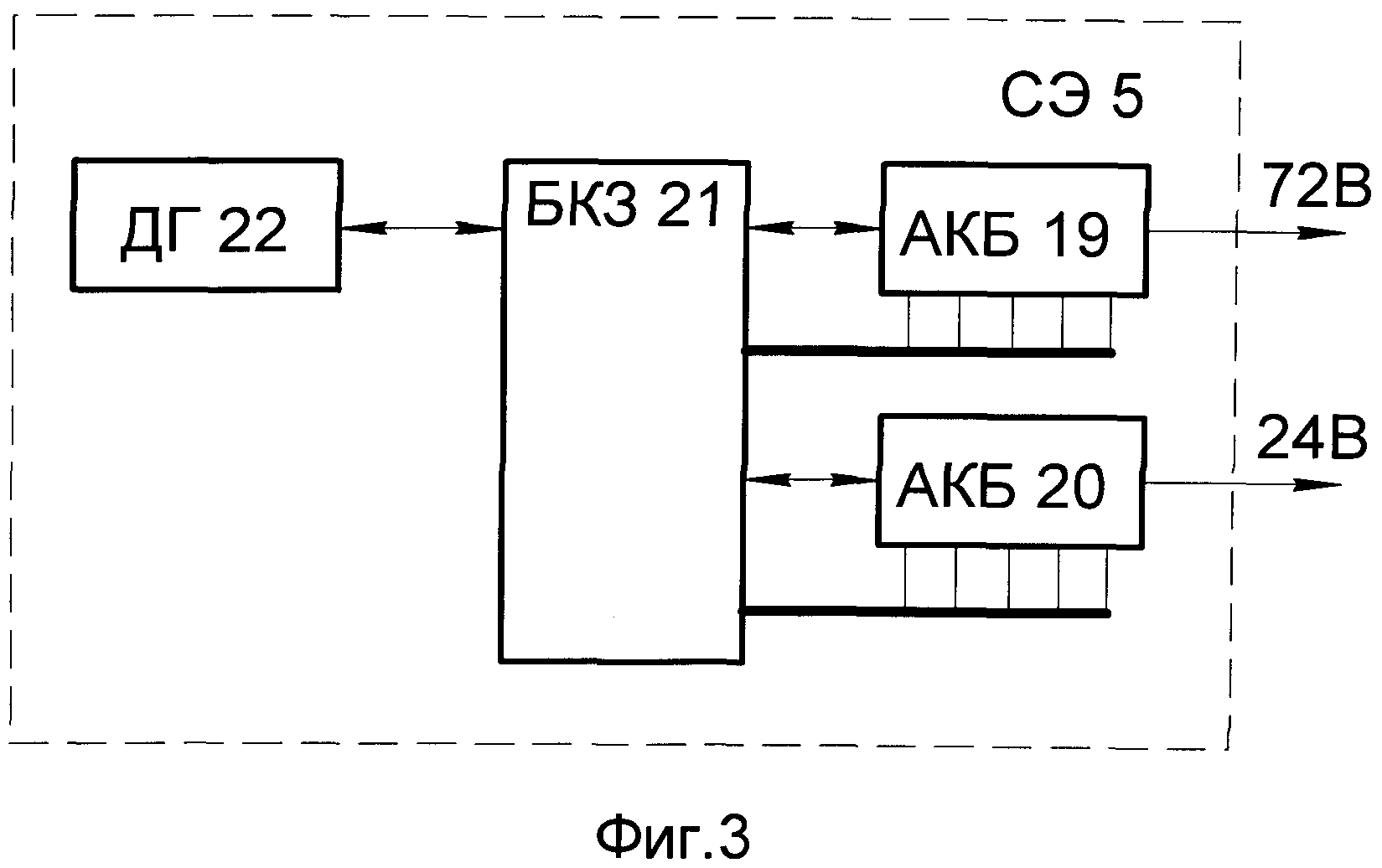
Сущность изобретения поясняется чертежами, где на фиг. 1 показан общий вид роботизированного комплекса разведки и огневой поддержки; на фиг. 2 - структурная схема системы топопривязки и ориентирования; на фиг. 3 - структурная схема системы электропитания; на фиг. 4 - общий вид пункта дистанционного управления вооружением; на фиг.5 - общий вид пункта дистанционного управления платформой; на фиг. 6 - общий вид элементов системы предупреждения столкновений.
Робототехнический комплекс (РТК) разведки и огневой поддержки построен по модульному принципу и содержит следующие функционально законченные модули: платформу, представляющую собой базовое шасси 1 с системой управления движением 2, средствами связи 3, пунктом дистанционного управления 4 и системой электропитания (СЭ) 5, навесное оборудование: боевой модуль 6 с комплектом вооружения 7 и пунктом дистанционного управления 8, разведывательный модуль 9. Шасси 1 выполнено в гусеничном варианте 10, корпус 11 шасси 1 - несущий, сварной из броневых стальных листов. Система управления платформой дополнительно оснащена системой топопривязки и ориентирования (СТО) 12, которая содержит автономную аппаратуру навигации (ААН) 13, механические датчики скорости (МДС) 14, аппаратуру спутниковой навигации (АСН) 15, которые связаны с центральной ЭВМ 16. Система электропитания робототехнического комплекса имеет два номинала напряжения для силовой установки 17 движителя, бортовой сети питания аппаратуры 18 и навесного оборудования 6, 7, 8. Для каждого номинала напряжения предусмотрена литий- железофосфатная аккумуляторная батарея (АКБ) 19 и 20. СЭ 5 оснащена микропроцессорным блоком контроля заряда (БКЗ) 21, дизель-генератором (ДГ) 22. Роботизированный комплекс дополнительно оснащен системой предупреждения столкновений, состоящей из блока сопряжения 23 и ультразвуковых датчиков 24.
Робототехнический комплекс разведки и огневой поддержки функционирует следующим образом. РТК предназначен для ведения войсковой и артиллерийской разведки, огневой поддержки войсковых подразделений, охраны и обороны военных объектов, мест дислокации. Наиболее важной идеей построения РТК является его модульность, т.е. все его составные части совершенно не зависимы и в определенных ситуациях могут выполнять задачи, возложенные на них самостоятельно. Навесное оборудование представлено самостоятельными единицами, требующими только электропитания, которое обеспечивает базовое шасси 1.
Базовое шасси 1 представляет собой гусеничное бронированное шасси на резинометаллических гусеницах с пружинно-гидравлическими подвесками опорных катков 10, способное развивать скорость на пониженной передаче до 10 км/ч, на прямой передаче - до 25 км/ч, двигаться с продольным и поперечным креном до 30 град., преодолевать уступы высотой до 20 см, рвы шириной до 40 см, снежный покров до 300 мм. Корпус 11 шасси 1 - несущий, для обеспечения 3-го класса защиты сварен из броневых стальных листов толщиной 6,5 мм.
Система управления платформой выполняет функции обеспечения движения шасси 1 по заданному алгоритму в автоматическом и ручном режимах управления, обеспечивает электропитание навесному оборудованию. Система управления дополнительно включает в себя СТО 12. Функцией системы СТО 12 является определение географических координат местоположения шасси 1, автономное ориентирование и определение углового положения в пространстве. СТО 12 построена по классической схеме. СТО 12 может функционировать в следующих режимах:
- начальное определение координат с помощью АСН или их ручной ввод;
- начальное автономное ориентирование (определение азимута продольной оси шасси);
- выставка известного азимута;
- непрерывный расчет координат местоположения и углов крена, тангажа, азимута: в режиме определения координат только по данным от АСН 15, режим определения координат в одометрическом режиме от МДС 14, режим определения координат в комплексированном режиме.
Все алгоритмы по навигации и ориентированию реализованы в центральной ЭВМ 16.
Режим определения координат в комплексированном режиме является основным режимом навигации. В данном режиме алгоритм навигации использует данные одометрической навигации и информации от АСН 15. Учитывая разную природу ошибок навигации одометрической (систематическая составляющая) и АСН 15 (случайная составляющая), алгоритм комплексированной навигации производит уточнение поправочных угловых коэффициентов одометрической навигации по статистическим данным от АСН 15. Таким образом, суммарная ошибка навигации за счет долговременной стабильности одометрической навигации и абсолютных координат от АСН 15 становится меньше ошибок одометрии и АСН по отдельности:
δо>δк<δасн,
где δο - среднеквадратическая ошибка одометрической навигации;
δасн - среднеквадратическая ошибка спутниковой навигации;
δк - среднеквадратическая ошибка комплексированной навигации.
Режим определения координат только по данным от АСН 15 является аварийным режимом. Используется в случае отказа ААН 13 и/или МДС 14. Также данный режим используется при отсутствии определенного ААН 13 азимута, при этом в процессе движения азимут с определенной точностью может быть определен и дальнейшее движение осуществляется в штатном режиме.
Режим определения координат в одометрическом режиме используется в случае постановки противником активных помех спутниковой навигации. Режим имеет достаточную точность для выполнения боевой задачи в позиционном районе действия РТК.
Система электропитания РТК имеет два номинала напряжения: 72 В для силовой установки движителя и 24 В бортовой сети питания аппаратуры и навесного оборудования. Для каждого номинала напряжения предусмотрена литий-железофосфатная АКБ 19 и 20. АКБ 19 и 20 представляет собой литий-железофосфатные элементы с номинальным напряжением 3,2 В, собранные в блоки для обеспечения номинальных напряжений. Для 72 В - 22 элемента, для 24 В - 7 элементов. Емкость каждого элемента составляет 160 А/ч. Срок службы АКБ 19 и 20 составляет не менее 1000 циклов заряд/разряд.
Блок контроля представляет собой микропроцессорное устройство, обеспечивающее регулирование, контроль зарядного тока, а также контроль и устранение дисбаланса заряда каждого элемента АКБ 19 и 20. Контроль и устранение дисбаланса элементов АКБ необходим для устранения выхода из строя отдельных элементов и обеспечения их равномерного старения, а также производится управление началом заряда.
Система предупреждения столкновений предназначена для определения наличия препятствий движению РТК. Минимальный горизонтальный размер препятствия типа «дерево» составляет 20 мм.
Система предупреждения столкновений основана на ультразвуковых датчиках 24. С помощью блока сопряжения 23 осуществляется обработка данных с датчиков 24, а также управление диаграммой направленности фазовым методом.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании робототехнического комплекса разведки и огневой поддержки, обеспечивающего ведение войсковой и артиллерийской разведки, огневую поддержку войсковых подразделений, охрану и оборону военных объектов, мест дислокации, выполнение боевых задач в любых погодных условиях, в дневное и ночное время, в различных температурных средах, движение в городских условиях, по бездорожью за счет выбора оптимального типа шасси, системы управления, центрального вычислителя, системы навигации и ориентирования, разведывательно-боевого модуля.
Робототехнический комплекс разведки и огневой поддержки, содержащий бронированное, оснащенное вооружением, поворотной башенной установкой, ходовой системой транспортное средство, аккумуляторную систему, силовую установку в виде дизель-генератора, систему наведения, систему управления, отличающийся тем, что робототехнический комплекс построен по модульному принципу и содержит следующие функционально законченные модули: платформу, представляющую собой базовое шасси с системой управления движением, средствами связи, пунктом дистанционного управления и системой электропитания, навесное оборудование: боевой модуль с комплектом вооружения и пунктом дистанционного управления, разведывательный модуль, составные части комплекса выполнены с возможностью реализации задач по назначению самостоятельно, шасси выполнено в гусеничном варианте с возможностью передвижения в городских условиях, по пересеченной местности, преодоления препятствий, разворота на 360° на месте, с возможностью обеспечения максимальной скорости передвижения до 25 км/ч, корпус шасси - несущий, сварной из броневых стальных листов, система управления платформой дополнительно оснащена системой топопривязки и ориентирования, выполненной с возможностью начального определения координат с помощью аппаратуры спутниковой навигации, определения азимута продольной оси шасси, выставления известного азимута, непрерывного расчета координат местоположения и углов крена, тангажа, азимута, система электропитания робототехнического комплекса имеет два номинала напряжения для силовой установки движителя и бортовую сеть питания аппаратуры и навесное оборудование, для каждого номинала напряжения предусмотрена литий-железофосфатная аккумуляторная батарея, система электропитания оснащена микропроцессорным блоком контроля заряда, выполненным с возможностью регулирования, контроля зарядного тока, а также контроля и устранения дисбаланса заряда каждого элемента аккумуляторной батареи, роботизированный комплекс дополнительно оснащен системой предупреждения столкновений, принцип действия которой основан на обработке сигналов с ультразвуковых датчиков.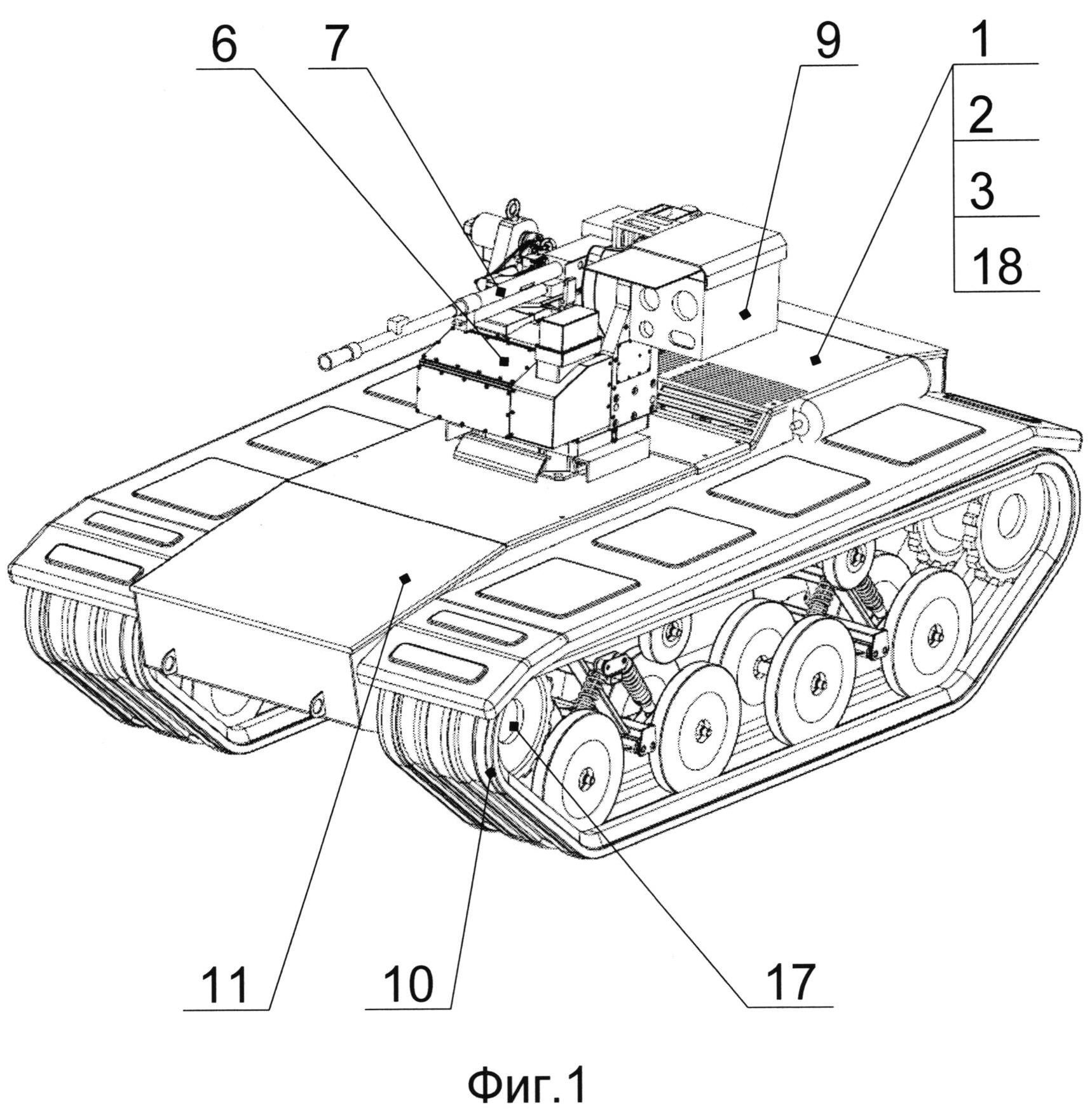
Топопривязчик
Локальная система терморегулирования воздуха зоны автоматизированных рабочих мест операторов мобильного информационно-аналитического комплекса вооружений
Мобильный комплекс навигации и топопривязки
Оружейная установка с прицельным устройством и способ его выверки
Способ изготовления деталей типа "стакан"
Модуль управления мобильного комплекса топогеодезической привязки
Стрелковое оружие
Механизм подъема антенны
Механизм отражения стрелкового оружия
Способ автоматизированного определения навигационно-топогеодезических параметров
Механизм подъема антенны
Механизм отражения стрелкового оружия
Способ автоматизированного определения навигационно-топогеодезических параметров
Осколочно-фугасная боевая часть
Система управления наведением инерционного объекта

