КАНАТНАЯ ТРАНСПОРТНАЯ СИСТЕМА ДОСТАВКИ
Вид РИД
Изобретение
Изобретение относится к канатным дорогам и может быть использовано, например, в транспортных системах доставки товаров или в системах городского или пригородного общественного транспорта и др.
Наиболее близким по технической сущности - прототипом является транспорт для движения по заданной траектории, включающий пару направляющих, которые расположены параллельно друг другу на опорах, установленных на поверхности земли с промежутками между соседними опорами, и оболочку, заполненную газом легче воздуха и выполненную с возможностью перемещения вдоль упомянутых направляющих, упомянутая оболочка снабжена кабиной для экипажа, пассажиров и груза и двигателем, образуя с ними дирижабль, а упомянутые кабина и направляющие соединены между собой по меньшей мере одним тросом (см. RU 127715 U1, кл. B64B 1/00, B61B 7/06).
Недостатком известного устройства является невозможность его использования в условиях множественности пунктов доставки и пунктов отправки, так как оно способно соединить лишь две географические точки и не обеспечивает одновременную доставку нескольких грузов по нескольким адресам. Другими недостатками являются невозможность обеспечения точного времени доставки, из-за использования в качестве движителя двигательной установки на дирижабле, а также необходимость наличия экипажа для управления дирижаблем. Кроме того, оболочка для газа, выполненная единой емкостью, не обеспечивает гибкости в отношении массы перевозимого груза.
Указанные недостатки сужают область применения известного решения.
Технический результат заключается в расширении области применения за счет обеспечения возможности доставки одновременно множества грузов или пассажиров по разным адресам, обеспечение возможности доставки по расписанию или к определенному сроку, а также за счет расширения диапазона масс перевозимых грузов.
Указанный результат достигается тем, что в канатной транспортной системе доставки, содержащей платформу, соединенную с оболочкой, заполненной газом легче воздуха, и направляющую, закрепленную на опорах, введены два тяговых троса, приводимых в движение посредством электродвигателя, установленного на одной из двух соседних опорах пролета, стрелочные переводы, содержащие участки обхода и поворотные участки с двигателем привода тягового троса, обеспечивающие изменение направления перемещения платформы в местах пересечения направлений движения, узел управления стрелочными переводами, обеспечивающий управление коммутацией стрелочных переводов и электродвигателей тягового троса для обеспечения доставки платформы из пункта отправки в пункт доставки, при этом направляющая выполнена в виде троса, тяговый трос выполнен в виде замкнутого троса, перекинутого через ролики соседних опор пролета, опоры, установленные в местах пунктов отправки и доставки, снабжены механизмами подъема-спуска платформы, содержащими подъемник с захватом, выполненный с возможностью вертикального перемещения вдоль опоры, оболочка состоит из последовательно соединенных двух или четырех баллонов, расположенных на раме вдоль направления движения, между двумя тяговыми тросами, а платформа разъемно закреплена в центре рамы с помощью стыковочного узла.
Кроме того,
- рама содержит опорную балку с закрепленной на ней поперечной перекладиной,
- канатная транспортная система доставки содержит промежуточные линейные опоры, поддерживающие направляющие,
- рама через П-образный зацеп соединена с направляющей посредством двух пар цилиндрических роликов, охватывающих направляющую в вертикальном и горизонтальном направлении, закрепленных на раме с помощью подпружиненного шарнирного соединения,
- рама соединена с тяговым тросом с помощью управляемого зажима,
- канатная транспортная система доставки содержит множество платформ,
- высота подвески направляющих составляет от 3-х до 150 м,
- платформа представляет собой грузовой и/или пассажирский вагон,
- диаметр баллонов оболочки составляет от 1 м до 5 м,
- подъемный механизм выполнен в виде манипулятора с захватом стыковочного узла, который включает конусообразный ловитель и пружинный фиксатор соединения платформы с рамой,
- стрелочный перевод размещен на специальной опоре, его участки обхода имеют заниженный уровень тягового троса на высоту, достаточную для прохождения через него платформы, а поворотный участок включает направляющий и тяговый тросы, электродвигатель привода тягового троса и привод поворота поворотного участка,
- узел управления стрелочными переводами содержит снабженное узлом ввода информации вычислительное устройство, входы которого соединены с датчиками стрелочных переводов, а выходы подключены к входам управления приводами стрелочных переводов и двигателей тяговых тросов,
- стыковочный узел включает конусообразный ловитель и пружинный фиксатор соединения платформы с рамой,
- баллоны оболочки соединены между собой посредством стягивающих тросов.
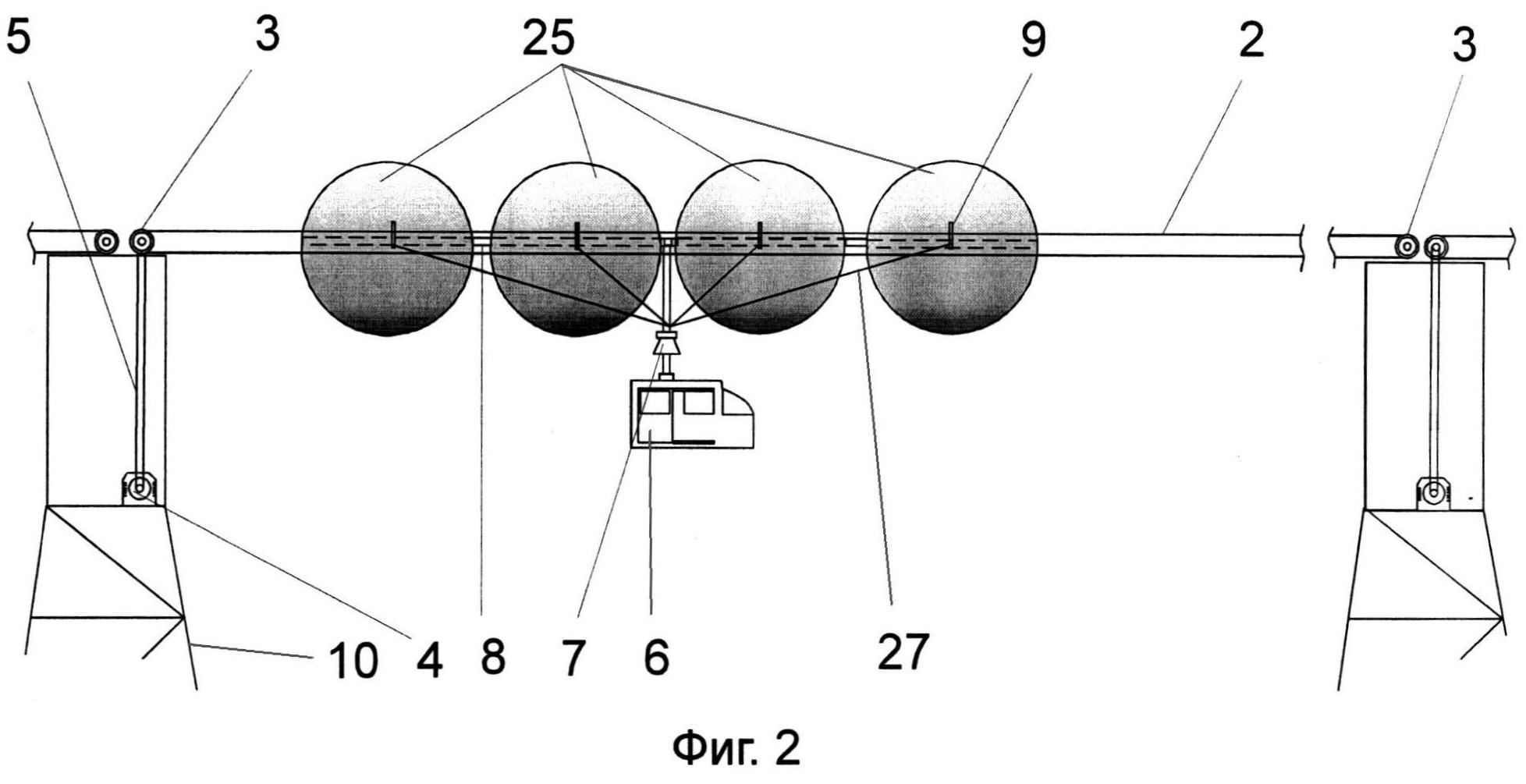
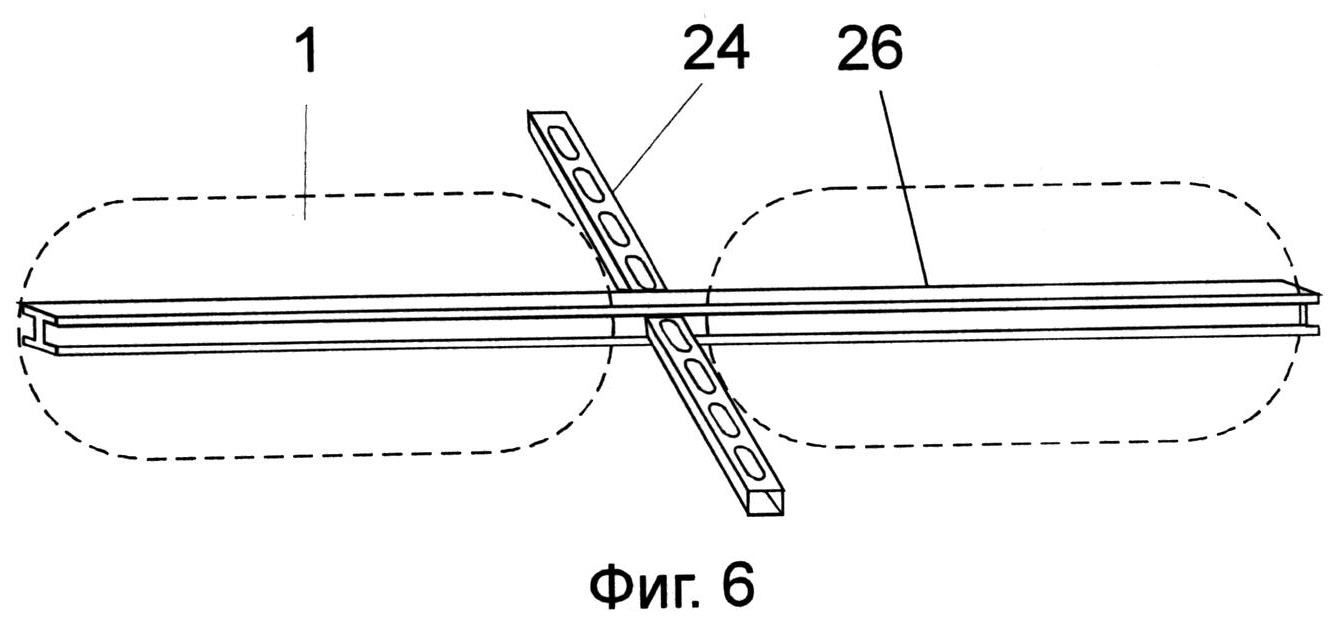
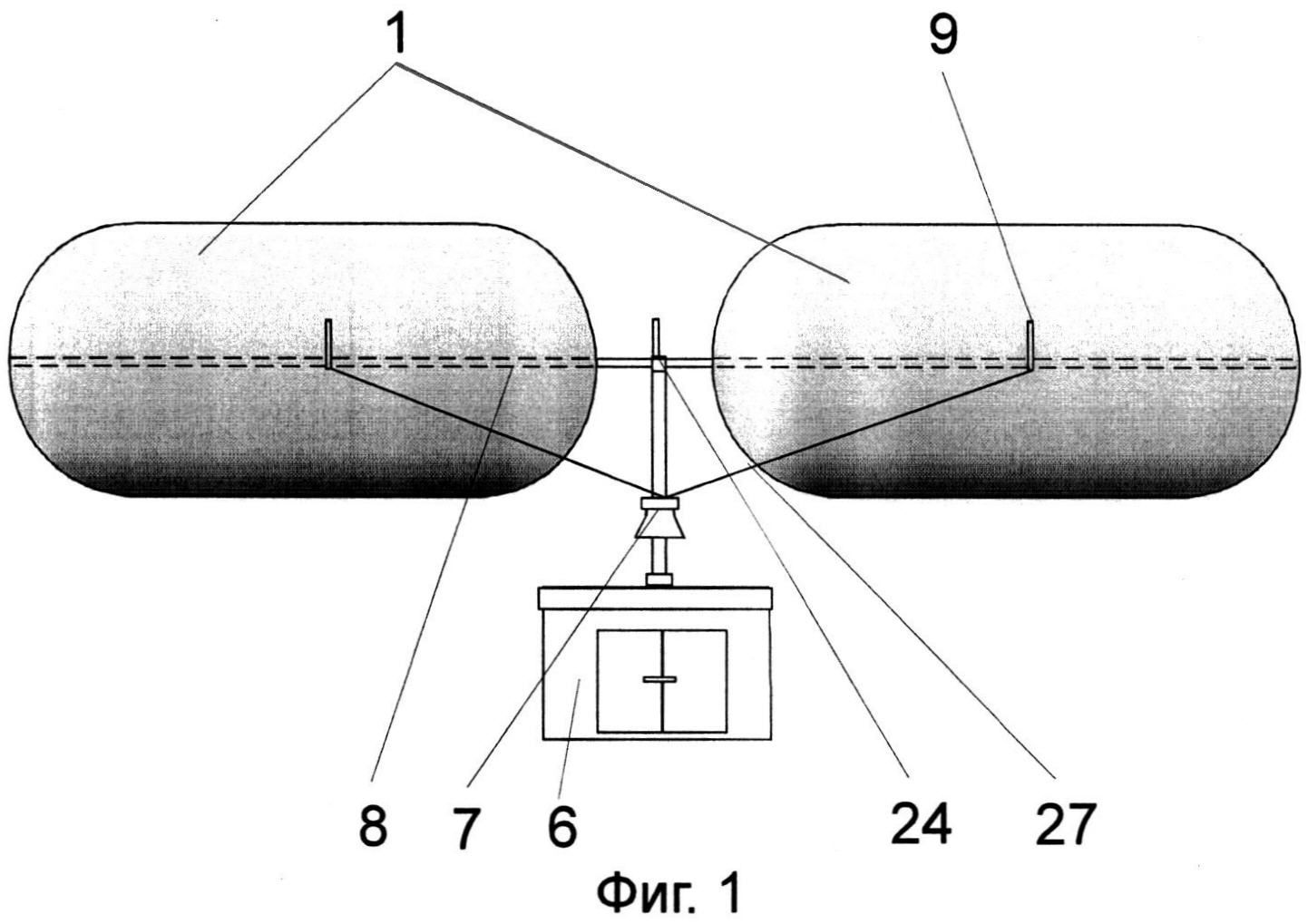
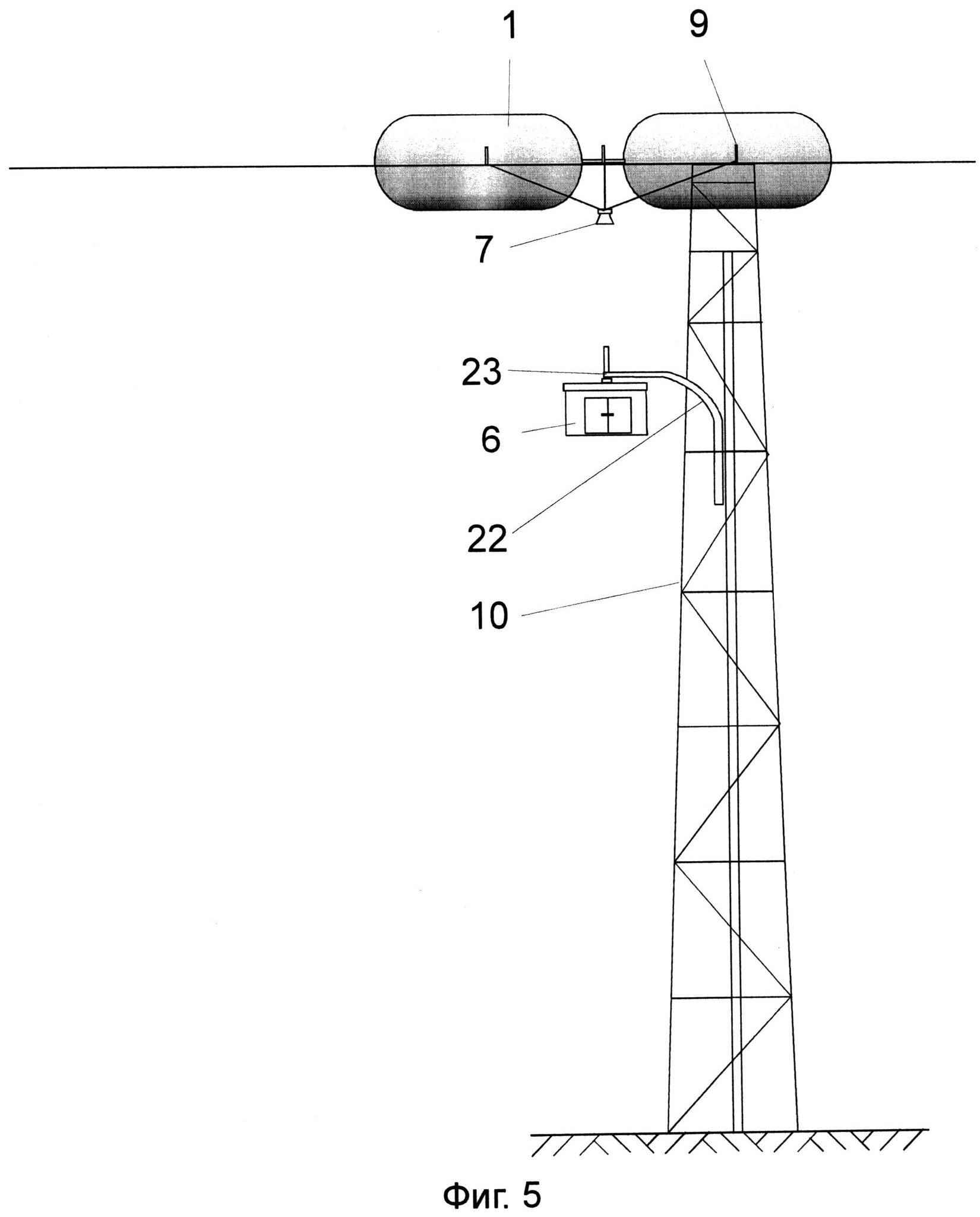
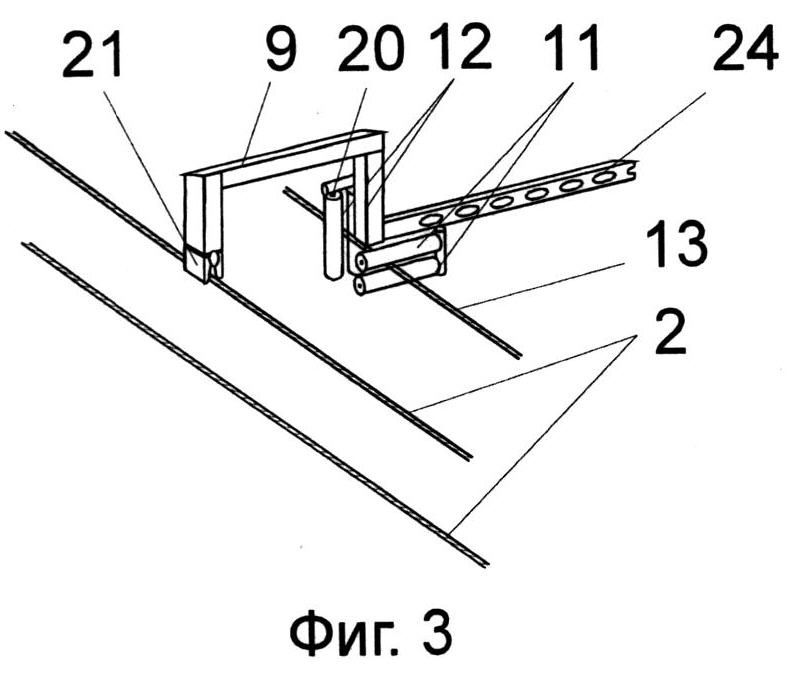
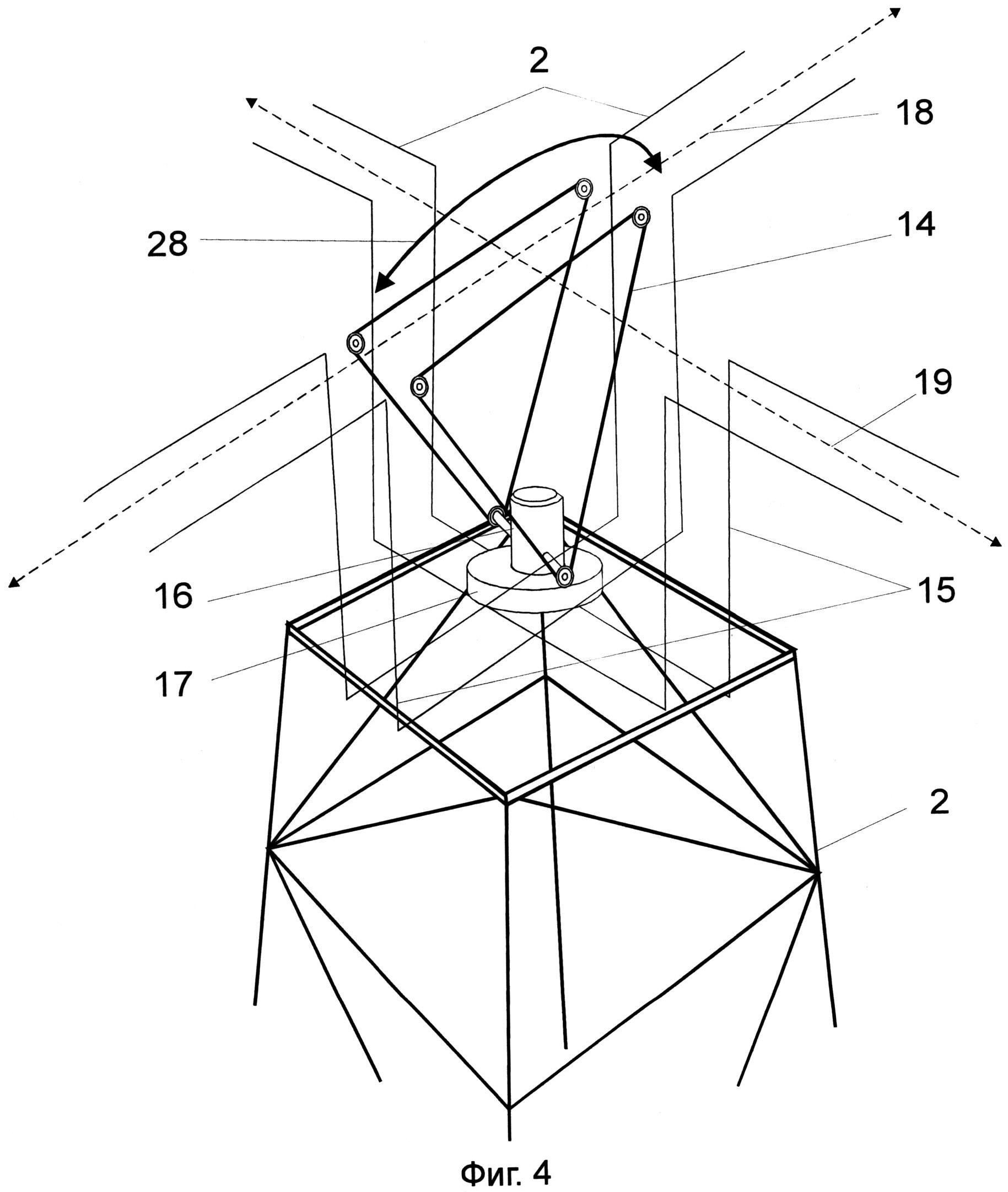
Канатная транспортная система доставки поясняется с помощью чертежей, где на Фиг.1 показан чертеж грузовой платформы, закрепленной на раме с двумя цилиндрическими баллонами оболочки, на Фиг.2 - чертеж пассажирской платформы, закрепленной на раме с четырьмя сферами оболочки, расположенными в пролете между двумя опорами канатной транспортной системы, на Фиг.3 - место зацепления сфер оболочки с тяговым тросом, на Фиг.4 - схематичное изображение стрелочного перевода, на Фиг.5 - опора с механизмом спуска платформы, на Фиг.6 - конструкция рамы.
На чертеже сделаны следующие обозначения.
1 - цилиндрические баллоны оболочки, 2 - тяговый трос, 3 - ролики, 4 - электродвигатель, 5 - привод электродвигателя, 6 - платформа, 7 - конусообразный ловитель стыковочного узла, 8 - рама, 9 - П-образный зацеп, 10 - опора, 11 - горизонтальные цилиндрические ролики опоры на направляющие, 12 - вертикальные цилиндрические ролики опоры на направляющие, 13 - направляющий трос, 14 - поворотный участок, 15 - участок обхода, 1 6 - электродвигатель тягового троса, 17 - привод поворота, 18 - направление движения, 19 - пересекающее направление, 20 - шарнирные крепления цилиндрических роликов, 21 - зажим тягового троса, 22 - подъемник, 23 - захват подъемника, 24 - поперечная перекладина, 25 - сферические баллоны оболочки, 26 - опорная балка, 27 - стягивающий трос, 28 - направление возможного поворота.
Канатная транспортная система доставки содержит множество грузовых и/или пассажирских платформ 6 (Фиг.1), соединенных с соответствующими заполненными газом легче воздуха, например гелием, оболочками, состоящими из двух цилиндрических 1 баллонов или четырех, последовательно соединенных сферических 25 (Фиг.2) баллонов диаметром от 1 м до 5 м, находящихся в зацеплении с направляющими 13 (Фиг.3) тросом и тяговым 2 тросом, которые установлены на опорах на высоте от 3 м до 150 м. Опоры установлены на крышах строений или непосредственно на поверхности земли, на фундаментной основе, так что пролет между опорами составляет около 5 км. Диаметр сфер, равный 5 м, обеспечивает перевозку четырех пассажиров или груза массой до 350 кг. Тяговый трос представляет собой замкнутый контур, перекинутый через ролики двух соседних опор пролета и приводимый в движение посредством электродвигателя, установленного на одной из двух соседних опор.
Соединение опорной рамы с направляющим тросом выполнено в виде двух пар цилиндрических роликов, ориентированных взаимно перпендикулярно и охватывающих направляющий трос в вертикальной и горизонтальной плоскости, так что опорная рама может свободно перемещаться вдоль направляющего троса. При этом цилиндрические ролики закреплены на опорной раме с помощью шарнира, обеспечивающего их отклонение при наличии препятствия в местах закрепления опорного троса.
Зажим 21 тягового троса установлен на П-образном зацепе и выполнен управляемым, он обеспечивает захват и удержание тягового троса по сигналам с соответствующих выходов узла управления стрелочными переводами.
Стрелочные переводы пересекающихся направлений 18 и 19 (Фиг.4) установлены на пути следования грузопассажирской платформы так, что соединение грузопассажирской платформы с направляющими выполнено с возможностью перехода ее зацепления с направляющей и тягового троса одного направления на направляющую и тяговый трос другого направления. Узел управления стрелочными переводами обеспечивает управление коммутацией стрелочных переводов и электродвигателей тягового троса для обеспечения доставки платформы из пункта отправки в пункт доставки.
Направляющая выполнена в виде неподвижного троса, закрепленного на двух соседних опорах.
Опоры, установленные в местах пунктов отправки и доставки, снабжены механизмами спуска платформы, содержащими подъемник 22 (Фиг.5) с захватом 23, выполненный с возможностью вертикального перемещения вдоль опоры. Пунктами отправки могут служить склады товаров, предназначенных для продажи, а пунктами доставки являются общественные места, приближенные к покупателям, где покупатели могут забрать купленные товары.
В случае перевозки пассажиров пункты отправки и пункты доставки представляют собой общественные остановки, где пассажиры могут воспользоваться канатной транспортной системой для перемещения в требуемое место, в этом случае канатная транспортная система выполняет функции общественного транспорта.
Оболочка из двух цилиндрических баллонов или четырех сферических баллонов расположена вдоль направления движения, между двумя направляющими и тяговыми тросами, а платформа размещена в центре между двумя средними баллонами.
Канатная транспортная система доставки содержит промежуточные линейные опоры, предотвращающие провисание направляющих.
Баллоны оболочки соединены между собой с помощью каркасной рамы, представляющей собой опорную балку 26 (Фиг.6), расположенную вдоль направления перемещения с жестко закрепленной на ней по меньшей мере одной поперечной перекладиной. На опорной балке закреплены баллоны оболочки, которые охватывают опорную балку в местах их крепления. На опорной балке разъемно закреплена платформа.
Канатная транспортная система доставки работает следующим образом.
Канатная транспортная система охватывает множество пунктов отправки различных товаров, например купленных с использованием дистанционной оплаты и пунктов доставки, то есть мест назначения доставки товаров, либо множество остановок общественного пассажирского транспорта, например в черте населенного пункта или между населенными пунктами. В первом случае грузопассажирские платформы предназначены для перевозки груза, во втором случае оборудованы креслами для перевозки пассажиров.
Подъемный механизм опоры обеспечивает подъем платформы на необходимую высоту в месте отправки, стыковку и закрепление ее на раме соединенной с баллонами оболочки, а также отстыковку и спуск грузовой или пассажирской платформы к месту доставки. Подъемный механизм выполнен в виде манипулятора с захватом стыковочного узла. Стыковочный узел обеспечивает крепление платформы к раме и включает конусообразный ловитель и пружинный фиксатор соединения платформы с рамой.
Рама содержит опорную балку, на которой установлены два или четыре баллона с закрепленной на ней поперечной перекладиной, и снабжена двумя расположенными по бокам П-образными захватами, каждый из которых зацеплен с помощью четырех, попарно расположенных в вертикальной и горизонтальной плоскости цилиндрических роликов с направляющим тросом и сцеплен посредством зажима с тяговым тросом, так, что перемещение платформы осуществляется тяговым тросом, направление перемещения определяет направляющий трос, а удержание на высоте обеспечивается баллонами, заполненными газом легче воздуха, и частично направляющим тросом.
Стягивающие тросы обеспечивают соединение платформы с баллонами оболочки для исключения провисания платформы.
Транспортная система доставки представляет собой сеть, покрывающую места отправки и места доставки, и включает пересекающиеся участки разных направлений. Изменение направления движения платформы в местах пересечения направлений осуществляется посредством стрелочных переводов, управляемых централизованно с пункта управления стрелочными переводами. Стрелочный перевод обеспечивает развязку движения на пересекающихся направлениях, он размещен на специальной опоре и содержит участки обхода места пересечения и поворотный участок. Участки обхода обоих пересекающихся направлений имеют заниженный уровень на высоту, достаточную для прохождения через него платформы, то есть от 2,5 до 4 м, а поворотный участок находится внутри участка обхода и включает направляющий и тяговый тросы, электродвигатель привода тягового троса и привод поворота поворотного участка.
Опорный и тяговый тросы поворотного участка находятся на одном уровне с опорным и тяговым тросами обоих пересекающихся направлений и подводятся приводом поворота поворотного участка точно к краям образовавшегося в результате снижения уровня разрыва опорного и тягового троса, так что платформа пересекает стрелочный перевод, не изменяя уровня движения, то есть не меняя высоты движения.
Перед поворотным участком направляющий трос обрывается, при этом его край жестко закреплен на кронштейне, который может являться препятствием для перемещения вдоль него вертикальных и/или горизонтальных цилиндрических роликов. Благодаря шарнирному закреплению цилиндрических роликов они отклоняются препятствием, ориентируясь вдоль направления движения, и затем после прохождения препятствия под действием пружины восстанавливают свое рабочее положение, охватывая направляющий трос. Таким же образом цилиндрические ролики преодолевают препятствия кронштейнов на границах пролетов или при прохождении через кронштейны промежуточных опор.
Если направление движения платформы при пересечении стрелочного перевода не должно меняться, то опорные и тяговые тросы поворотного участка соединяют разрыв, образованный занижением уровня обходного участка. Тяговые тросы поворотного участка двигаются с той же скоростью, что и тяговые тросы соответствующего пролета, и платформа пересекает стрелочный перевод, не меняя направления и скорости.
В случае необходимости изменения движения платформы на стрелочном переводе платформа с баллонами оболочки заводится тяговыми тросами на поворотный участок, после чего останавливается - тяговый трос поворотной платформы останавливают. Привод поворотного участка обеспечивает поворот поворотного участка вместе с платформой на пересекающее направление, при этом направляющий трос поворотного участка стыкуется с краями направляющего троса пересекающего направления, а тяговый трос устанавливается в положение, соответствующее пересекающему направлению, после чего двигатель тягового троса поворотного участка включается и платформа начинает перемещение в новом направлении.
Поворот поворотного участка осуществляется вместе с платформой и управляется дистанционно с помощью узла управления стрелочными переводами, представляющего собой вычислительное устройство с узлом ввода информации.
На вход узла управления стрелочными переводами через узел ввода информации, в простейшем случае это клавиатура компьютера или терминал, поступают данные о пункте и времени отправки и пункте и времени доставки, на основе которых вычисляют маршрут движения платформы, с учетом состояния всех стрелочных переводов и скорости движения тяговых тросов. Состояние стрелочных переводов определяется на основе датчиков состояния стрелочных переводов.
Так, например, если перемещение платформы от места отправки к месту доставки по кратчайшему пути между двумя соседними опорами исключено из-за того, что стрелочные переводы на этом участке в это время заняты по другим направлениям для обслуживания другой доставки, то маршрут может быть проложен с использованием других направлений в обход занятого другой доставкой участка.
В случае использования канатной транспортной системы в качестве пассажирского транспорта платформы осуществляют перевозку пассажиров, которые заказывают маршрут и время доставки с помощью терминала, установленного на остановке. Параметры заказанного маршрута поступают на вход узла управления, в котором на основе информации о занятости стрелочных переводов другими маршрутами выявляются необходимые стрелочные переводы, вычисляются время и направление их переключения для обеспечения заказанного маршрута.
Другим вариантом использования пассажирских платформ является их движение по определенному расписанию, и переключение стрелочных переводов осуществляют в соответствии с определенным заранее графиком. Посадка и высадка пассажиров осуществляется на остановках, являющихся пунктами отправки и доставки.
Для подъема и снижения платформы, в случае перевозки грузов, используется манипулятор с захватом в качестве рабочего органа. Перед отправкой платформы в пункте отправки манипулятор обеспечивает ее подъем вдоль мачты и доставку на требуемую высоту, где находятся сферы оболочки, после чего устанавливает пружинный фиксатор в ловитель, закрепленный на раме. Пружина фиксатора освобождается, и платформа надежно фиксируется, захват освобождают, позволяя платформе начать перемещение под действием движущегося тягового троса. Снижение платформы в пункте доставки осуществляют в обратном порядке, выжимают пружинный фиксатор, освобождают и опускают платформу с помощью манипулятора, после чего осуществляют выгрузку доставленного товара.
Наличие нескольких баллонов оболочки обеспечивает возможность перевозки грузов в широком диапазоне масс, так как имеется возможность гибко регулировать подъемную силу, набирая баллоны нужного диаметра для требуемой массы груза.
Транспортная система доставки грузов включает в себя участки, имеющие разную скорость перемещения платформы, которые не соединяются между собой стрелочными переводами и пересекаются на разных уровнях высоты.
Канатная транспортная система доставки может быть выполнена с использованием стандартных приборов, компонентов, вычислительных средств и широко используемых материалов: металл, пластик, стекло и пр.
Таким образом, канатная транспортная система доставки обеспечивает более широкую область применения за счет обеспечения возможности доставки одновременно множества грузов или пассажиров по разным адресам, обеспечения возможности доставки по расписанию или к определенному сроку, а также за счет расширения диапазона масс перевозимых грузов.