Результат интеллектуальной деятельности: СПОСОБ СТАБИЛИЗАЦИИ ПОДВОДНОГО АППАРАТА В РЕЖИМЕ ЗАВИСАНИЯ
Вид РИД
Изобретение
Изобретение относится к области автоматического управления динамическими объектами.
Известен способ управления динамическими объектами, заключающийся в том, что по известным координатам состояния объекта определяют величину ошибки, равную разности между заданными входными координатами и соответствующими текущими координатами объекта. Команды управления объектом формируются в соответствии с величинами ошибки и коэффициентов пропорциональности, которые вычисляются на основе решения уравнения Риккати [Ройтенберг Я.Н. Автоматическое управление. - М.: Наука, 1978, с.225-226].
Недостатком указанного способа управления является невозможность в полной мере обеспечить высокую точность управления динамическими объектами в условиях, когда не удается точно определить заданные входные координаты.
Известен также способ стабилизации подводного аппарата в режиме зависания, включающий подачу сигналов управления на входы его движителей, для компенсации силовых и моментных воздействий на аппарат, вызывающих его отклонение от исходного положения [Филаретов В.Ф., Алексеев Ю.К., Лебедев А.В. Системы управления подводными роботами. - М.: Круглый год, 2001, с.171-179; 223-227].
Данный способ является наиболее близким к предлагаемому изобретению.
Но с помощью этого способа невозможно точно стабилизировать подводный аппарат в заданной точке пространства, используя управление только по разомкнутому контуру без учета реальных отклонений этого аппарата от исходного положения. Это особенно важно, если на подводный аппарат осуществляется силовое и моментное воздействия со стороны окружающей среды (морские течения и волнения моря) или объектов, установленных на его корпусе (воздействия со стороны кабель-троса, манипулятора и другого оборудования), если рассчитать или точно измерить эти воздействия не представляется возможным. В результате возникает необходимость обеспечения указанной стабилизации подводного аппарата с помощью упоров, создаваемых его движителями, на входы которых поступают сигналы, сформированные с учетом информации о его реальных пространственных перемещениях.
Задачей изобретения является устранение указанного выше недостатка, и в частности, обеспечение требуемой высокой точности стабилизации подводного аппарата в режиме его зависания в заданной точке пространства с помощью управляющих систем, использующих информацию о реальном отклонении этого аппарата от исходного (предписанного ему) положения.
Технический результат изобретения заключается в автоматическом задании управляющих сигналов, подаваемых на входы соответствующих движителей подводного аппарата, которые формируются на основе информации, получаемой в том числе и от датчиков ориентации подводного аппарата в пространстве и от его гидроакустических навигационных датчиков, обеспечивающих измерение текущих линейных и угловых смещений этого аппарата от его заданного положения в пространстве.
Поставленная задача решается тем, что способ стабилизации подводного аппарата в режиме зависания, включающий подачу сигналов управления на входы его движителей, для компенсации силовых и моментных воздействий на аппарат, вызывающих его отклонение от исходного положения, отличается тем, что определяют линейное и угловое смещения аппарата от его исходного положения, при этом на два движителя каждой из трех пар движителей подводного аппарата одновременно подают сигналы управления, пропорциональные линейному смещению подводного аппарата параллельно продольным осям движителей конкретной пары и угловому смещению подводного аппарата относительно оси, перпендикулярной плоскости, образуемой продольными осями этой пары движителей. Кроме того, линейное и угловое смещения аппарата от его исходного положения определяют посредством дополнительно установленных на его борту гироскопических датчиков и датчиков гидроакустической навигационной системы.
Сопоставительный анализ признаков заявляемого способа с признаками аналогов и прототипа свидетельствует о соответствии этого способа критерию "новизна".
При этом отличительные признаки формулы изобретения решают следующие функциональные задачи.
Признак «определяют линейное и угловое смещения аппарата от его исходного положения» позволяет получить информацию о реальном отклонении этого аппарата от исходного (предписанного ему) положения.
Признаки «…на два движителя каждой из трех пар движителей подводного аппарата одновременно подают сигналы управления, пропорциональные линейному смещению подводного аппарата параллельно продольным осям движителей конкретной пары и угловому смещению подводного аппарата относительно оси, перпендикулярной плоскости, образуемой продольными осями этой пары движителей…» обеспечивают стабилизацию подводного аппарата в заданной точке пространства.
Признаки дополнительного пункта формулы изобретения обеспечивают решение задачи определения величин и направлений линейных и угловых смещений подводного аппарата от его исходного положения под влиянием внешних воздействий.
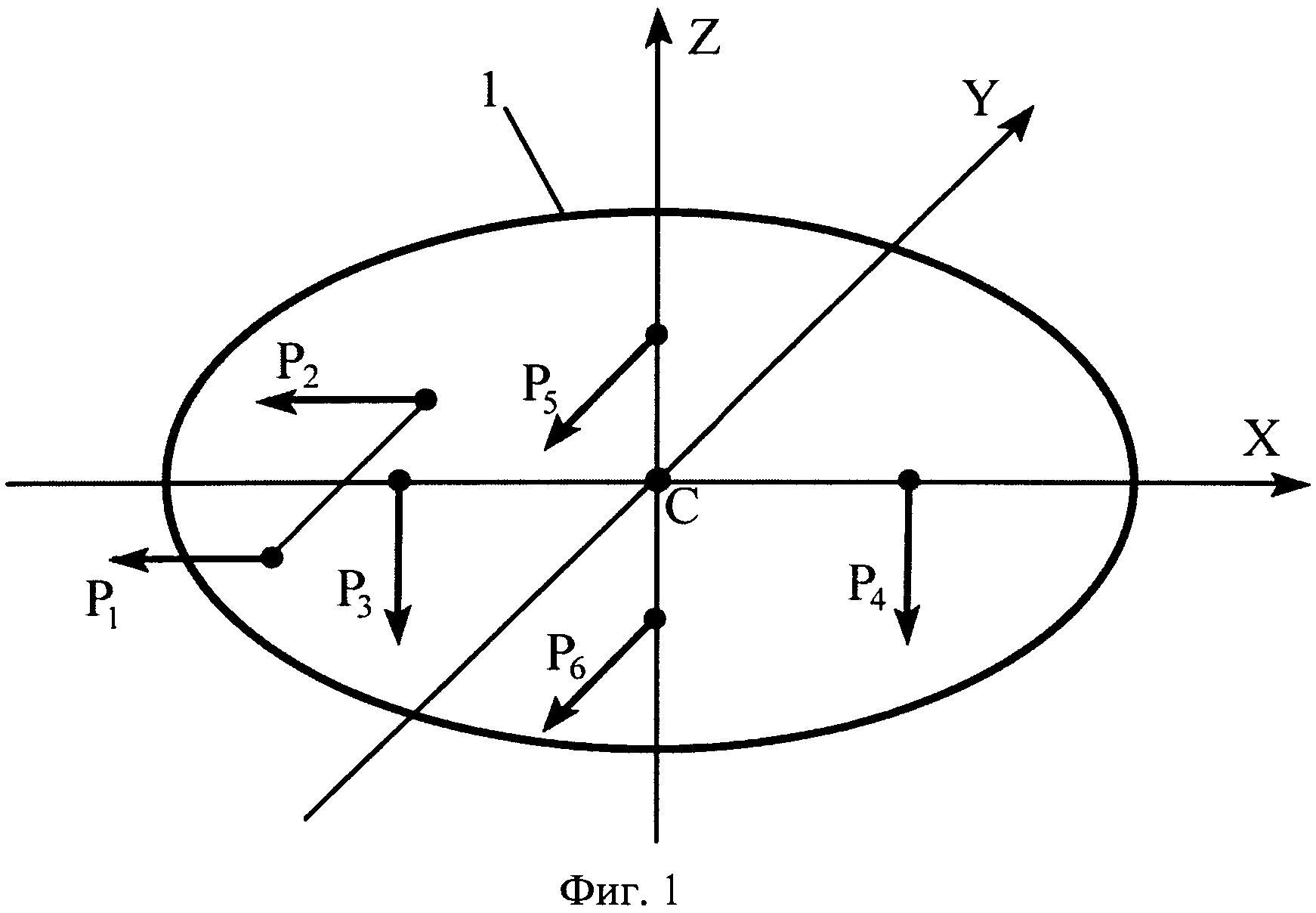
Заявленный способ осуществляется с помощью устройства, которое иллюстрируется чертежами, где на фиг.1 изображена схема расположения движителей подводного аппарата, а на фиг.2 - схема каналов управления тремя парами движителей подводного аппарата.
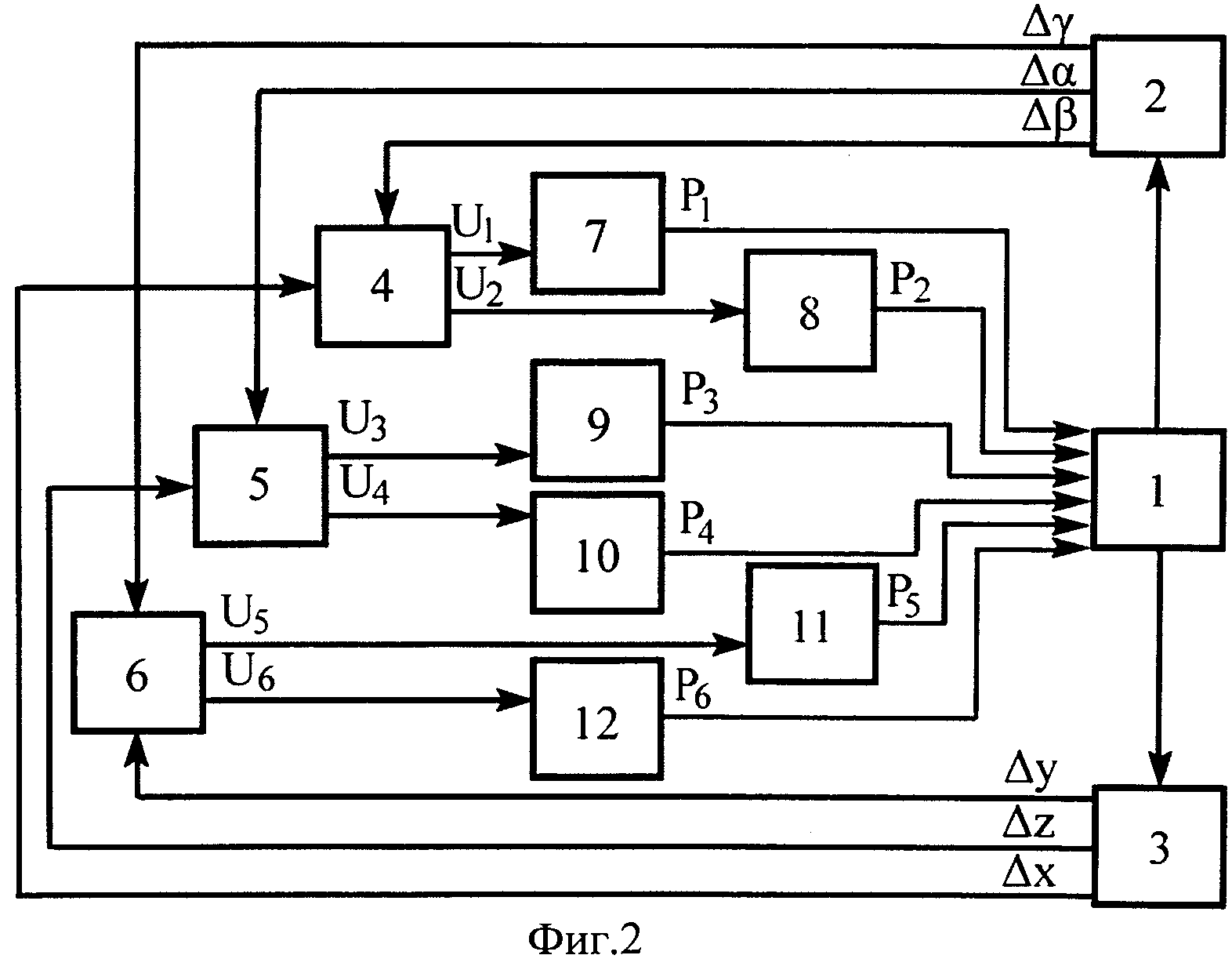
На чертежах показаны подводный аппарат 1; блок 2 гироскопов; навигационная система 3; первый 4, второй 5 и третий 6 блоки формирования сигналов управления движителями подводного аппарата 1; первый 7, второй 8, третий 9, четвертый 10, пятый 11 и шестой 12 движители подводного аппарата 1. Кроме того, на чертежах показаны С - центр масс подводного аппарата; P1-Р6 - упоры, создаваемые движителями 1-6 подводного аппарата, соответственно, направления которых совпадают с продольными осями соответствующих движителей; X, Y и Z - оси правой прямоугольной абсолютной системы координат XYZ; Δα, Δγ, Δβ - соответственно текущие отклонения подводного аппарата по курсу, крену и дифференту от его исходного положения; Δх, Δy, Δz - соответствующие отклонения точки С от ее исходного положения по соответствующим осям абсолютной системы координат XYZ; U1-U6 - соответственно сигналы управления движителями 1-6 подводного аппарата 1.
Следует отметить, что схема расположения движителей позволяет перемещать подводный аппарат в пространстве произвольным образом. При этом в заданном положении подводного аппарата его центр масс С совмещен с началом абсолютной системы координат XYZ, а ее оси совпадают с осями симметрии подводного аппарата, причем ось Х совпадает с продольной осью подводного аппарата. Под влиянием неконтролируемых внешних воздействий может происходить незапланированное угловое и линейное смещение подводного аппарата из исходного положения в пространстве. Это затрудняет выполнение многих технологических операций в режиме зависания подводного аппарата вблизи или над объектом работ.
Для принятой схемы установки движителей подводного аппарата управление его линейными Δх и угловыми Δβ перемещениями обеспечивается упорами P1 и Р2, управление перемещениями Δz и Δα -упорами Р3 и P4, а перемещениями Δу и Δγ - упорами Р5 и Р6. В связи с этим возникает необходимость на два движителя каждой из трех пар движителей подводного аппарата одновременно подавать сигналы управления, пропорциональные его линейному смещению параллельно продольным осям движителей этой пары, а также угловому смещению подводного аппарата относительно оси, перпендикулярной плоскости, образуемой продольными осями этой пары движителей. Эти сигналы должны обеспечить формирование соответствующими движителями подводного аппарата упоров, стабилизирующих его в заданной точке пространства. Указанные сигналы формируются на основе информации о текущем угловом и линейном смещении подводного аппарата в пространстве относительно его исходного положения.
Заявленный способ реализуется следующим образом.
После зависания подводного аппарата 1 в некоторой точке пространства около объекта работ на этот аппарат начинают оказывать влияние внешние воздействия (подводные течения, волнения море, работающие установки, закрепленные на борту подводного аппарата и др.), произвольно смещая его из исходной позиции в некоторую другую позицию. В результате для стабилизации подводного аппарата движители 7-12 должны создаваться упоры P1-Р6, компенсирующие его угловые и линейные смещения от заданного положения в пространстве. Эти упоры обеспечиваются с помощью сигналов управления U1-U6, формируемых на выходах блоков 4-6 и поступающих на соответствующие движители 7-12 подводного аппарата. При этом на соответствующие входы блоков 4-6 поступают сигналы Δα, Δγ, Δβ от блока 2 гироскопов, а сигналы Δх, Δy, Δz от навигационной системы 3. Очевидно, что реализация предложенного способа стабилизации подводного аппарата в режиме его зависания не вызывает принципиальных затруднений, поскольку в качестве блоков 3-6, движителей 7-12, гироскопических датчиков 2 и навигационной системы 3 используются известные типовые устройства и узлы, чьи технические и эксплуатационные характеристики соответствуют параметрам работы подводного аппарата.
Технологическая линия для переработки золошлаковых отходов - продуктов сжигания угольного топлива
Электропривод робота
Электропривод манипулятора
Генератор энергии
Генератор энергии
Генератор энергии
Генератор энергии
Технологическая линия для переработки золошлаковых отходов - продуктов сжигания угольного топлива
Способ криосохранения морских микроводорослей
Судно снабжения подводной нефтедобывающей платформы
Способ формирования ультратонкой пленки
Электропривод манипулятора
Способ формирования ультратонкой пленки
Способ получения антифрикционной композиции
Подводный генератор отпугивающих звуков
Электропривод робота
Электропривод робота
Способ неразрушающего контроля деталей из полимерных композиционных материалов
Технологическая линия для переработки золошлаковых отходов - продуктов сжигания угольного топлива
Электропривод робота

