Результат интеллектуальной деятельности: КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ
Вид РИД
Изобретение
Изобретение относится к радиолокации и может быть использовано в многофункциональных аэродромных радиолокаторах, в системах управления воздушным движением, защиты государственных границ, орнитологических исследований для обнаружения воздушных и наземных объектов интереса, в том числе и малоразмерных (беспилотных летательных аппаратов, стай и одиночных птиц в районе аэродрома).
Известны традиционные радиолокаторы (аэродромные, управления воздушным движением, защиты государственных границ), осуществляющие обзор воздушного пространства и земной поверхности путем секторного сканирования лучом диаграммы направленности в азимутальной и угломестной плоскости, которые излучают сигналы с относительно узкой полосой рабочих частот (не более 20 МГц). Однако их применение для обнаружения малоразмерных объектов (беспилотных летательных аппаратов, стай и одиночных птиц, движущихся людей на открытой местности), эффективная поверхность рассеяния которых не превышает 1 м кв., и при помеховых отражениях сигнала от местных предметов на подстилающей поверхности малоэффективно.
Излучение коротких импульсов длительностью τи=10…20 наносек при радиолокационном мониторинге пространства позволяет (см. «Вопросы перспективной радиолокации» /под ред. А.В. Соколова/, М.: Радиотехника, 2003 г., 188-189) существенно снизить уровень помеховой составляющей в принятом сигнале за счет сокращения элемента пространственного разрешения и, тем самым, повысить точность измерения наклонной дальности до объекта, а определение вектора скорости объекта позволяет производить классификацию и распознавание обнаруженных объектов.
Высокое разрешение объектов хотя бы по одной из координат (например, дальность до объекта) снижает требования по разрешению объектов по остальным координатам и значительно сокращает временные и вычислительные ресурсы на обработку сигналов.
Улучшение угловой разрешающей способности радиолокатора достигается применением алгоритмов обработки сигналов в моноимпульсных системах. (См. патенты США №3778827 и №6483478 B2).
Известен (А.И. Леонов, К.И. Фомичев «Моноимпульсная радиолокация». М.: Радио и связь, 1984 г., 26-40 с.) моноимпульсный радиолокатор, содержащий приемную и передающую фазированные антенные решетки (ФАР), передающее устройство, приемное устройство, блок управления и первичной обработки, связанный входами с выходами приемного устройства, а также генератор сигналов, связанный с входами передающего и приемного устройств, подключенных, соответственно, к передающей и приемной ФАР.
Недостатками известного технического решения следует признать его низкие функциональные возможности, обусловленные тем, что радиолокатор формирует сравнительно длинные по времени импульсные сигналы (τи~1 мксек), которые не обеспечивают высокоточное измерение дальности до объекта, а также тем, что в блоке управления и первичной обработки не определяется скорость объектов.
Наиболее близким аналогом разработанного устройства можно признать (RU, патент 2460089, опубл. 29.03.2011) моноимпульсный радиолокатор, который выбран в качестве прототипа, содержащий приемную и передающую ФАР, аппаратуру формирования суммарной и разностной азимутальной ДН антенн, приемное устройство, блок управления и первичной обработки, соединенный с ЭВМ, а также передающее устройство, генератор сигналов и систему стробирования.
Недостатками известного технического решения следует признать его низкие функциональные возможности, обусловленные тем, что приемная и передающая ФАР являются линейными и потому радиолокатор определяет только две координаты объекта в пространстве (угол места не определяется), а также тем, что в блоке управления и первичной обработки не определяется скорость объектов.
Техническая задача, решаемая использованием разработанного устройства, состоит в разработке усовершенствованного оборудования для контроля воздушного пространства.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является расширение функциональных возможностей устройства за счет высокоточного измерения трехмерного положения объектов в пространстве и их скорости.
Для достижения указанного технического результата предложено использовать короткоимпульсный радиолокатор с электронным сканированием в двух плоскостях и с высокоточным измерением координат и скорости объектов. Разработанный короткоимпульсный радиолокатор содержит плоскую приемопередающую активную фазированную антенную решетку (АФАР), разделенную по осевым линиям на четыре плоские примыкающие подрешетки, каждая из которых содержит, по меньшей мере, по одному приемопередающему модулю (ППМ), конструктивно объединенному с линейной антенной решеткой излучателей, и одному приемному блоку, при этом радиолокатор дополнительно содержит модулятор короткоимпульсных излучаемых сигналов, синтезатор опорных сигналов, блок управления и первичной обработки цифровых сигналов (БУПОС), выполненный с возможностью обработки принятых сигналов от четырех подрешеток, вычисления координат и скорости движения объектов, опорно-поворотное устройство для обеспечения кругового обзора пространства, в котором установлены мотор-редуктор, вращающееся устройство передачи цифровой информации от блока управления и первичной обработки цифровых сигналов потребителю и энкодер точного определения угла азимута, а также и автоматизированное рабочее место оператора с ЭВМ, причем передающие входы всех приемопередающих модулей в каждой подрешетке через первый и второй делители излучаемого сигнала соединены с выходом модулятора излучаемого сигнала, высокочастотный первый вход модулятора соединен с пятым выходом синтезатора опорных сигналов, а приемные первые выходы всех приемопередающих модулей в каждой подрешетке через блок сумматора сигналов соединены с первым входом приемного блока подрешетки, а второй вход приемного блока каждой подрешетки по гетеродинному сигналу соединен с одним из четырех выходов синтезатора опорных сигналов, выходы приемных блоков в каждой подрешетке соединены с первыми четырьмя высокочастотными входами БУПОСа, первые четыре выхода БУПОСа подключены с возможностью передачи сигналов управления на вторые входы ППМ всех четырех подрешеток, пятый вход БУПОСа подключен к опорно-поворотному устройству с возможностью приема от него кодов угла азимута от энкодера, входящего в состав опорно-поворотного устройства, а также к ЭВМ, вход БУПОСа подключен к кварцевому генератору, а шестой высокочастотный выход БУПОСа подключен к входу синтезатора опорных сигналов, седьмой выход БУПОСа подключен к второму входу.
В некоторых вариантах реализации разработанного устройства приемопередающая активная фазированная антенная решетка содержит одну плоскую фазированную решетку излучателей с узким лучом диаграммы направленности. Это позволяет повысить точность измерения угловых координат объектов.
В некоторых вариантах реализации разработанного устройства каждая из четырех плоских примыкающих подрешеток содержит, по меньшей мере, по одному приемопередающему модулю и, по меньшей мере, одному приемному блоку, позволяющих сформировать на прием суммарную диаграмму направленности путем суммирования принятых сигналов от четырех подрешеток в блоке управления и первичной обработки цифровых сигналов, разностную азимутальную диаграмму направленности путем суммирования сигналов от двух правых подрешеток и суммирования сигналов от двух левых подрешеток с последующим вычитанием полученных сумм сигналов в блоке управления и первичной обработки цифровых сигналов и разностную угломестную диаграмму направленности путем суммирования сигналов от двух верхних подрешеток и суммирования сигналов от двух нижних подрешеток с последующим вычитанием полученных сумм сигналов в блоке управления и первичной обработки цифровых сигналов. Приведенный вариант реализации конструкции обеспечивает дополнительное повышение точности измерения угловых координат объектов и возможность сканировать в двух плоскостях.
В состав приемопередающего модуля, который является конструктивно законченным блоком, предпочтительно включены линейная антенная решетка излучателей, высокочастотный циркулятор для разделения приемных и передающих сигналов, элементы формирования амплитудно-фазового распределения сигналов на прием и передачу по вертикальным рядам излучателей плоской фазированной антенной решетки, элементы формирования амплитудно-фазового распределения сигналов на прием и передачу по горизонтальным рядам излучателей плоской фазированной антенной решетки, комплект приемных усилителей отраженного сигнала, комплект передающих усилителей излучаемого сигнала с управляемыми манипуляторами подачи электропитания и микроконтроллер для управления элементами формирования амплитудно-фазового распределения сигналов в соответствии с заданной временной диаграммой работы с обеспечением электронного сканирования активной фазированной антенной решеткой в двух плоскостях. Разработанная конструкция приемопередающего модуля позволяет обеспечить сканирование в двух плоскостях и существенно понизить энергопотребление всего радиолокатора.
Предпочтительно в качестве элементов формирования амплитудно-фазового распределения сигналов использованы управляемые аттенюаторы и фазовращатели.
В некоторых вариантах реализации опорно-поворотное устройство может быть выполнено с возможностью обеспечения кругового обзора пространства по азимуту.
В некоторых вариантах реализации короткоимпульсный радиолокатор может быть выполнен с возможностью обзора пространства во всей верхней полусфере путем электронного сканирования главным лучом диаграммы направленности всего заданного угломестного сектора с последующим электронным передвижением на ширину луча по половинной мощности по азимуту и повторным сканированием всего угломестного сектора до предельного угла азимута, при этом активная фазированная антенная решетка выполнена с возможностью доворота посредством опорно-поворотного устройства по углу азимута до появления первого дифракционного луча с обеспечением бездифракционного сканирования вкруговую.
Приемные блоки блока управления и первичной обработки цифровых сигналов могут быть выполнены с возможностью генерирования сигналов на промежуточной частоте, более чем в два раза превышающей тактовую частоту аналого-цифровых преобразователей, при этом только программируемая логическая интегральная схема выполнена с возможностью производить в цифровом виде второе преобразование частоты и квадратурной демодуляции сигнала. Подобное выполнение блоков позволяет упростить СВЧ часть аппаратуры, обеспечить идентичность каналов, повысить надежность.
Блок управления и первичной обработки цифровых сигналов может содержать задающий кварцевый генератор, выполненный с возможностью формирования высокостабильного сигнала для синтезатора опорных сигналов, аналогово-цифрового преобразователя и программируемой логической интегральной схемы. Это позволяет обеспечить качество синхронизации работы всего изделия.
В предпочтительном варианте реализации программируемая логическая интегральная схема блока управления и первичной обработки цифровых сигналов выполнена с возможностью вычисления скорости объектов путем организации, по меньшей мере, трех раздельных вычислительных ветвей на основе цифровых умножителей при разных допплеровских набегах фазы и по оценке максимального уровня амплитуды сигнала во всех каналах. Это обеспечивает измерение вектора скорости объектов.
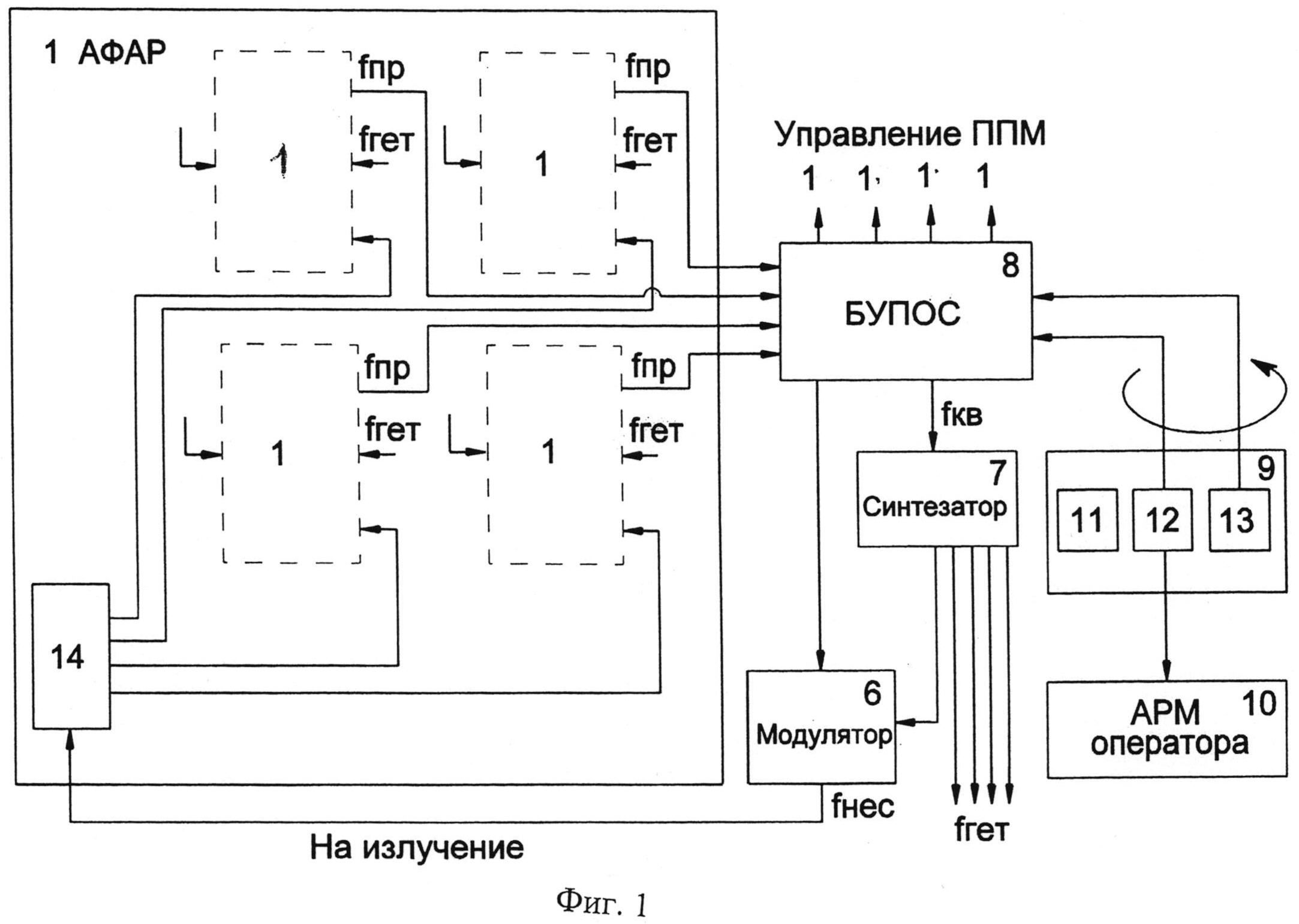
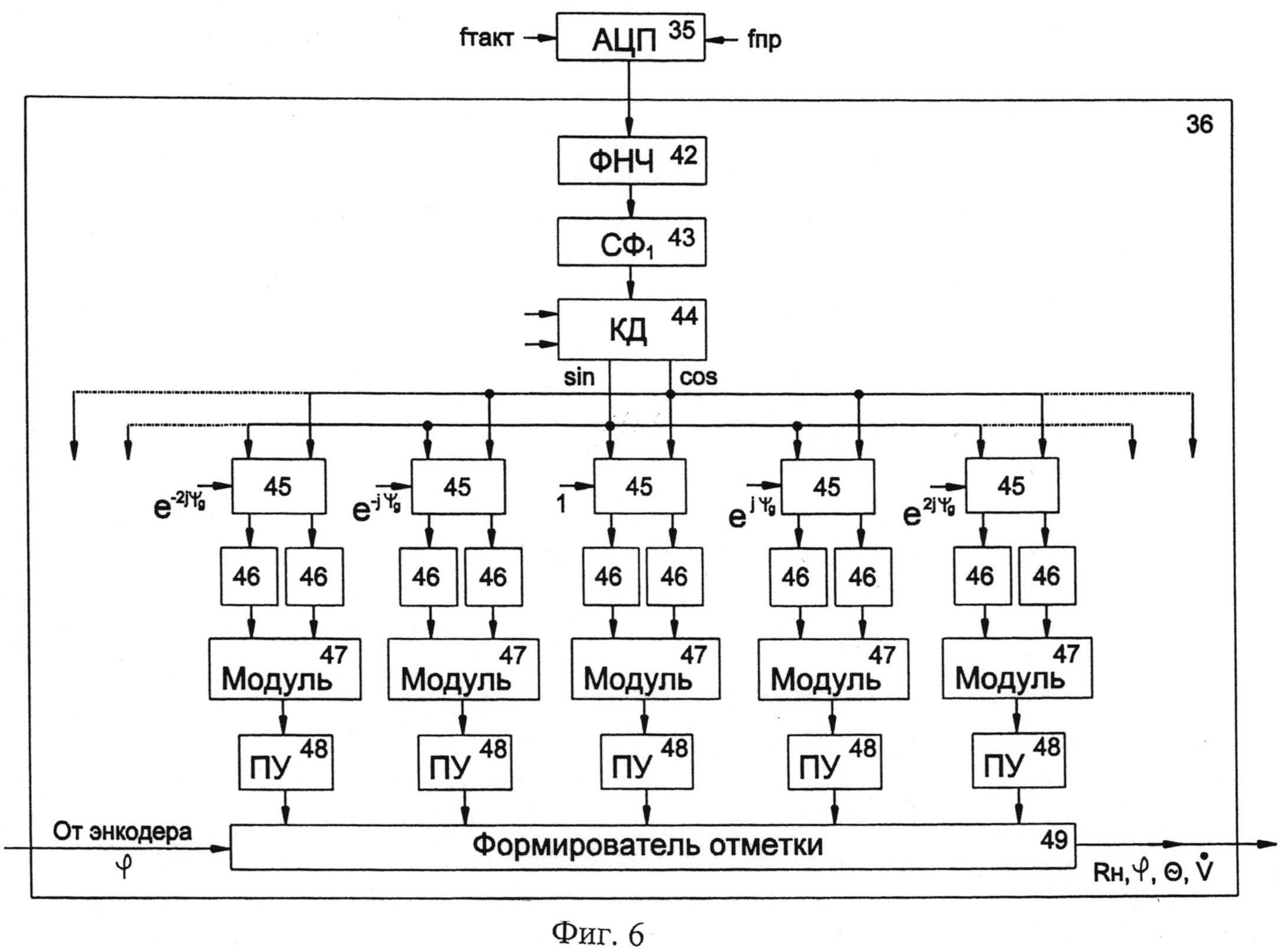
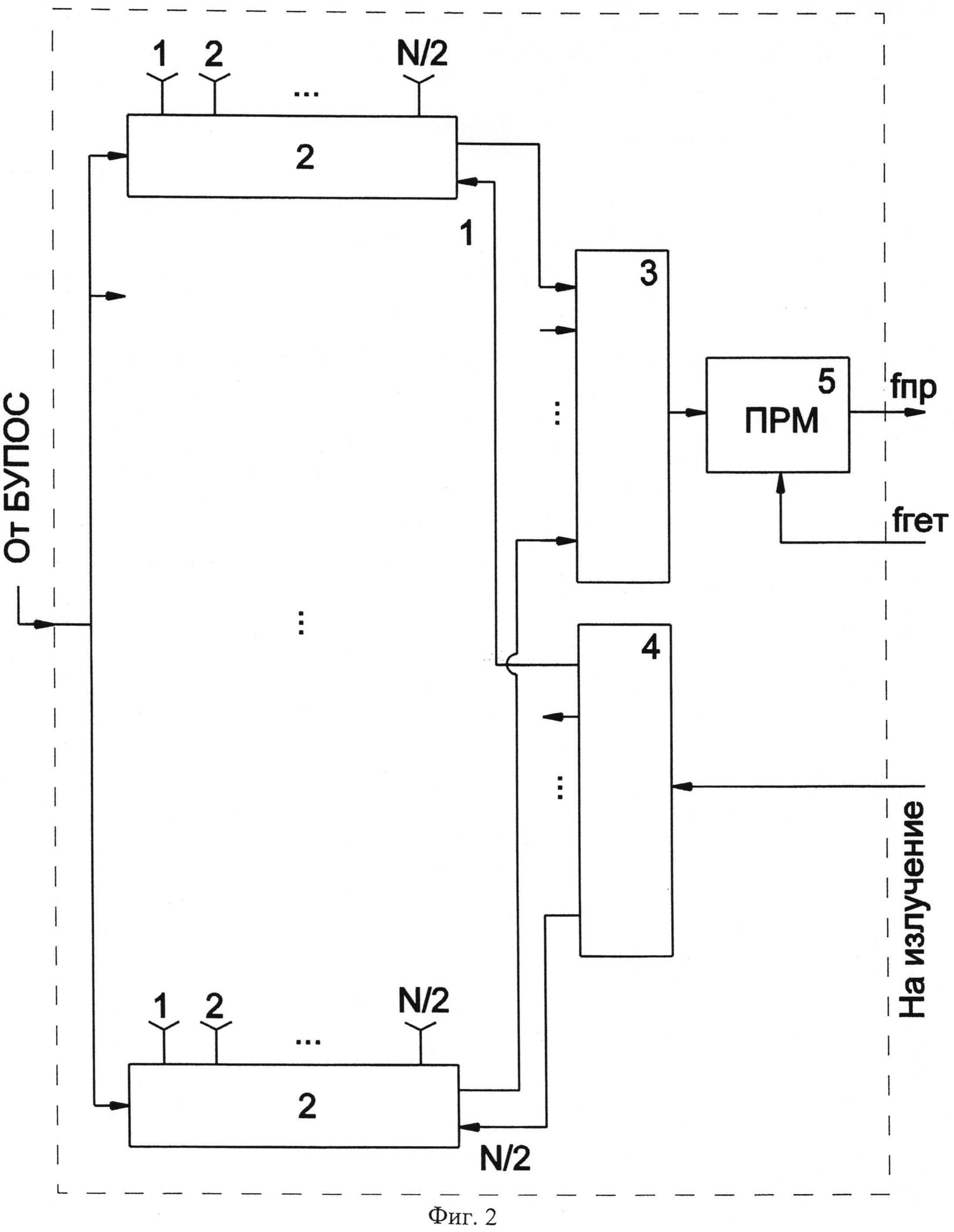
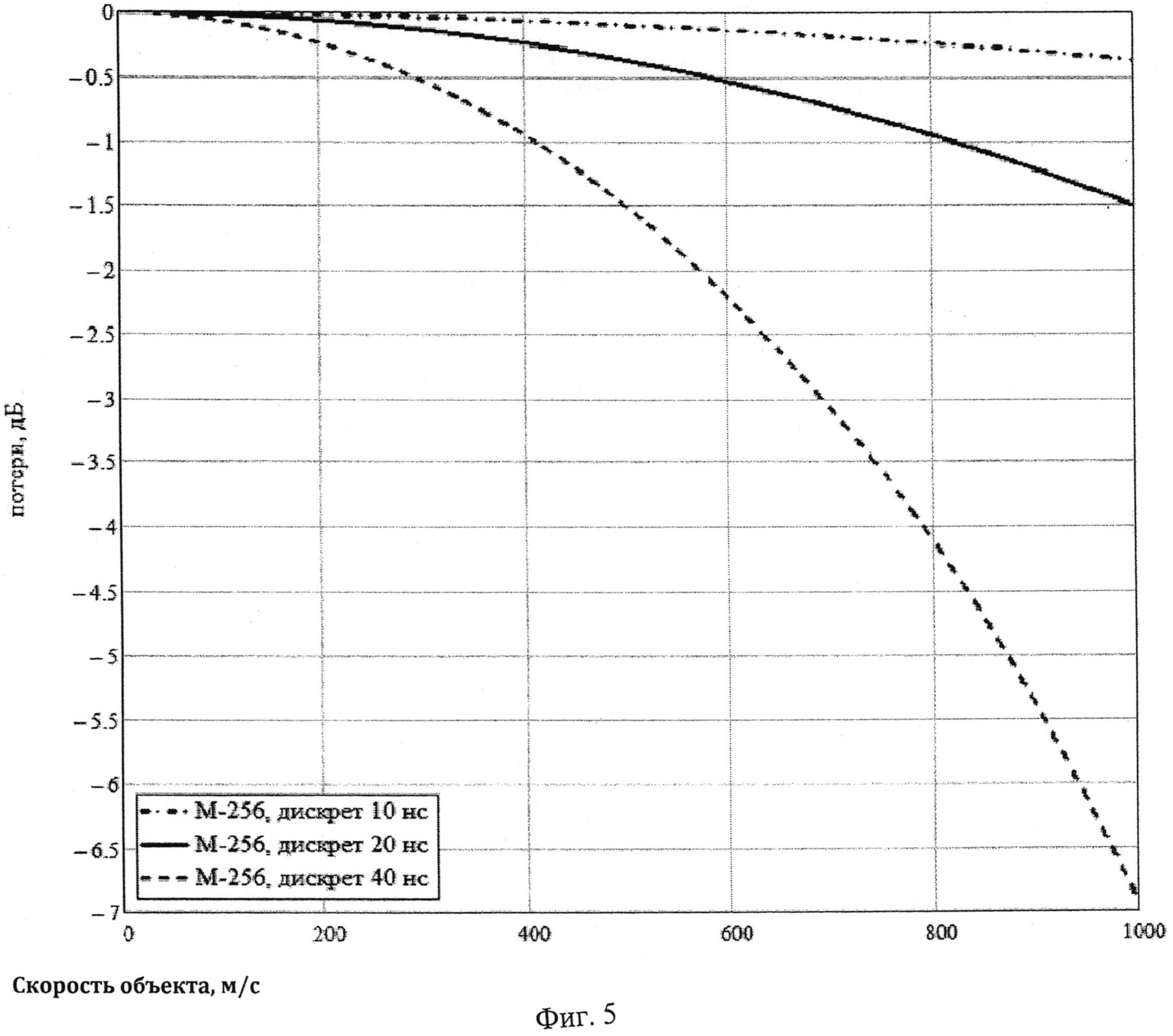
Конструкция разработанного устройства приведена на графическом материале, где на фиг. 1 представлена блок-схема радиолокатора; на фиг. 2 изображена блок-схема одной подрешетки АФАР; на фиг.. 3 показан один из вариантов построения приемопередающего модуля; на фиг. 4 представлена упрощенная блок-схема блока управления и первичной обработки входного сигнала. На фиг. 5 приведен график зависимости энергетических потерь в потенциале радиолокационной станции (РЛС) при цифровой обработке сигнала от скорости объекта из-за проявления допплеровского набега фазы в пачке принятых радиоимпульсов и несогласованной фильтрации пачки этих импульсов; на фиг. 6 приведена блок-схема алгоритма оценки скорости объектов.
Радиолокатор разработаной конструкции содержит (фиг. 1) плоскую приемопередаюшую активную фазированную антенную решетку (АФАР) 1, разделенную по осевым линиям на четыре плоские примыкающие подрешетки (фиг. 2), каждая из которых содержит, по меньшей мере, один приемопередающий модуль 2, конструктивно объединенный с линейной антенной решеткой излучателей, причем количество излучателей равно N/2, сумматор 3 принятых антенной подрешеткой сигналов, делитель излучаемых сигналов 4, приемный блок 5. Все ППМ в каждой подрешетке устанавливают в столбец с шагом, определяемым размерами и видом диаграммы направленности (ДН) всей АФАР (1). Количество приемопередающих модулей 2 в подрешетке может быть увеличено до N/2. Таким образом, количество излучателей в плоской АФАР 1 составляет N2. Кроме того, разработанная конструкция содержит модулятор 6 короткоимпульсных излучаемых сигналов, синтезатор 7 опорных сигналов, блок 8 управления и первичной обработки цифровых сигналов, в котором обрабатываются принятые сигналы от четырех подрешеток, а также опорно-поворотное устройство 9 для обеспечения вращения АФАР по азимуту, причем опорно-поворотное устройство содержит мотор-редуктор 11, вращающееся устройство передачи цифровой информации 12 и энкодер 13 точного определения угла азимута, также разработанное устройство содержит автоматизированное рабочее место 10 оператора. От модулятора 6 излучаемый сигнал через второй делитель излучаемых сигналов 14 (фиг. 1) поступает на четыре подрешетки АФАР и через первый делитель 4 (фиг. 2) распределяется по высокочастотным входам всех ППМ подрешетки. Сигналы от высокочастотных выходов всех ППМ подрешетки объединяются в сумматоре 3 и поступают на приемный блок 5, где сигнал усиливается, преобразуется в сигнал промежуточной частоты (f пр) и передается для обработки в БУПОС 8. Синтезатор 7 формирует опорный сигнал на излучение (f нес), который поступает в модулятор 6, и на сигналы гетеродинной частоты (f гет) для всех приемных блоков 5. От кварцевого генератора, расположенного в БУПОС 8, на синтезатор 7 поступает опорный кварцевый сигнал (f кв). Обмен информацией между БУПОС и ЭВМ автоматизированного рабочего места оператора 10 производится через вращающееся устройство 12, которое может быть выполнено на основе волоконно-оптического перехода. Мотор-редуктор 11 может быть выполнен с полым валом, через который проходят кабели связи от энкодера 13 и АРМ оператора 10 к БУПОС 8.
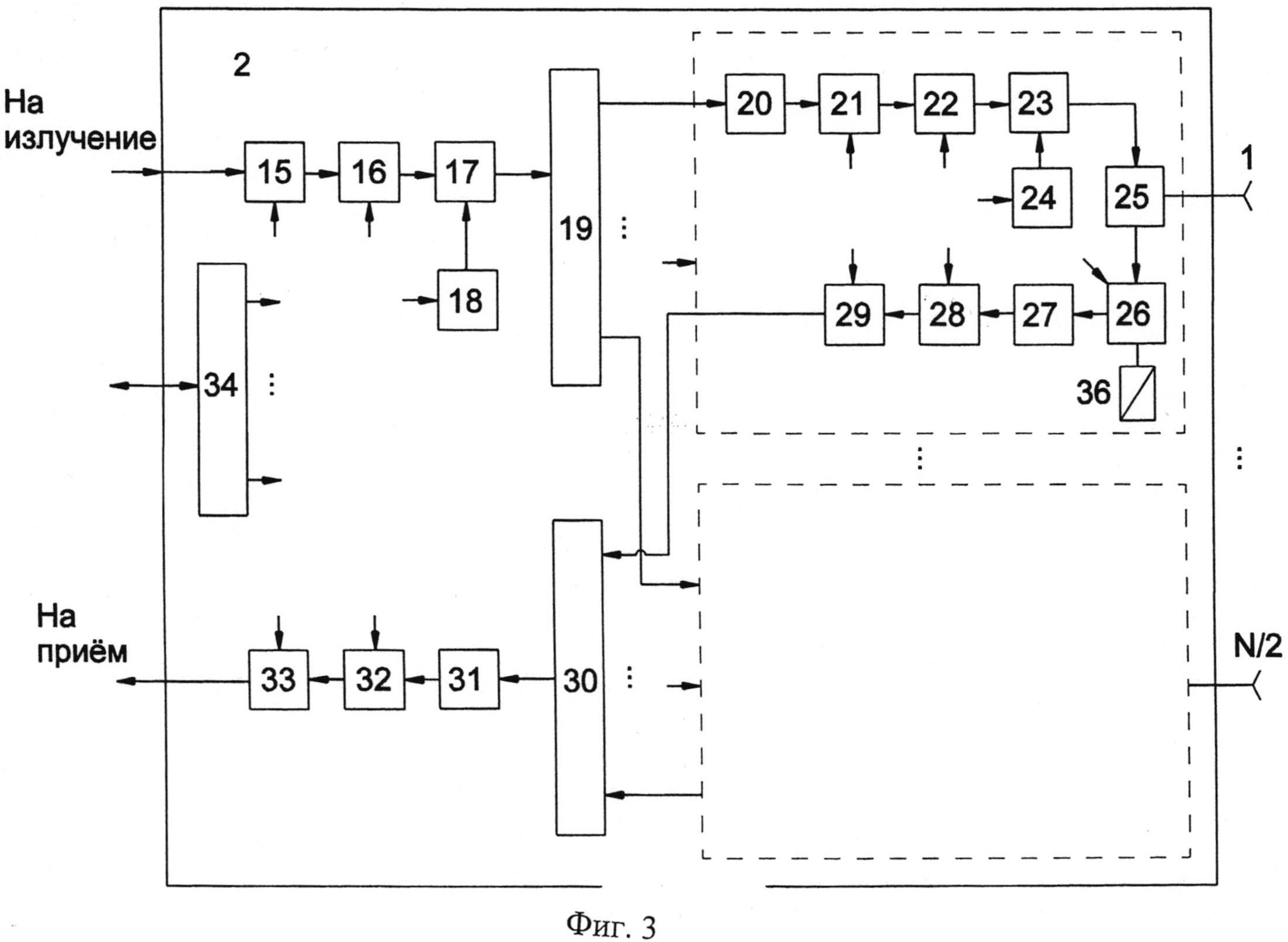
Один из вариантов выполнения блок-схемы ППМ 2 приведен на фиг. 3. Указанный вариант имеет многоканальную (количество каналов - N/2) в горизонтальной плоскости структуру. ППМ содержит одну для всех каналов линейную фазированную антенную решетку из N/2 излучателей, а также в каждом канале Y-циркулятор 25 для разделения трактов излучаемых и приемных сигналов. При проектировании широкополосной линейной антенной решетки в ППМ для радиолокатора X-диапазона частот предложено применять печатные рупорные излучатели различного вида, в частности полосковые ТЕМ-рупоры типа Вивальди, обладающие малой массой и обеспечивающие хорошее согласование волновых сопротивлений в широкой полосе рабочих частот. В каждом канале ППМ в тракте излучаемых сигналов последовательно установлены промежуточный усилитель мощности 20, управляемые аттенюатор 21 и фазовращатель 22, оконечный усилитель мощности 23 и управляемый манипулятор 24 подачи элекропитания на оконечный усилитель мощности 23. В каждом канале ППМ в тракте приемных сигналов последовательно установлены управляемые аттенюатор 29 и фазовращатель 28, малошумящий усилитель 27 и двухпозиционный переключатель 26 с СВЧ-нагрузкой 36. Далее тракты излучаемых сигналов всех каналов ППМ объединяются в делителе сигнала 19, а тракты приемных сигналов всех каналов ППМ объединяются в сумматоре сигнала 30. С выхода сумматора сигналов 30 принятый сигнал поступает на малошумящий усилитель 31 и далее через управляемые фазовращатель 32 и аттенюатор 33 на высокочастотный выход ППМ. От высокочастотного входа ППМ излучаемый сигнал последовательно поступает на управляемые аттенюатор 15 и фазовращатель 16, затем на предварительный усилитель мощности 17 и далее на делитель сигнала 19. Подача электропитания на предварительный усилитель мощности 17 регулируется управляемым манипулятором 18. Микроконтроллер 34 по сигналам от БУПОС 8 в соответствии с временной диаграммой работы РЛС формирует сигналы управления для аттенюаторов 15, 33, 21, 29, фазовращателей 16, 32, 22, 28, манипуляторов подачи электропитания 18, 24 и двухпозиционного переключателя 26.
Таким образом, амплитудно-фазовое распределение сигнала по горизонтали антенного полотна АФАР 1 формируется управляемыми аттенюаторами 21, 29 и фазовращателями 22, 28 в каждом канале каждого ППМ, а по вертикали - управляемыми аттенюаторами 15, 33 и фазовращателями 16, 32 в каждом ППМ. Электронное сканирование в угломестной плоскости осуществляется фазовращателями 16, 32, а в азимутальной плоскости фазовращателями 22, 28. Двухпозиционный переключатель 26 позволяет внести дополнительное ослабление сигнала, проникающего в приемный тракт через Y-циркулятор во время излучения.
В настоящее время на рынке радиоэлементов появилось значительное разнообразие перечисленных выше микросхем, обладающих требуемым быстродействием, уровнем выходной мощности, необходимых для создания короткоимпульсных радиолокаторов. Основными производителями такой продукции являются НЛП «Пульсар», НПФ «Микран», ОКБ «Планета», МАСОМ, Tico Electronics, Hittite и Avago.
Модулятор короткоимпульсных излучаемых сигналов 6 может быть выполнен на принципах, изложенных в патенте на изобретение RU 2460089, опубликован 29.03.2011 г.
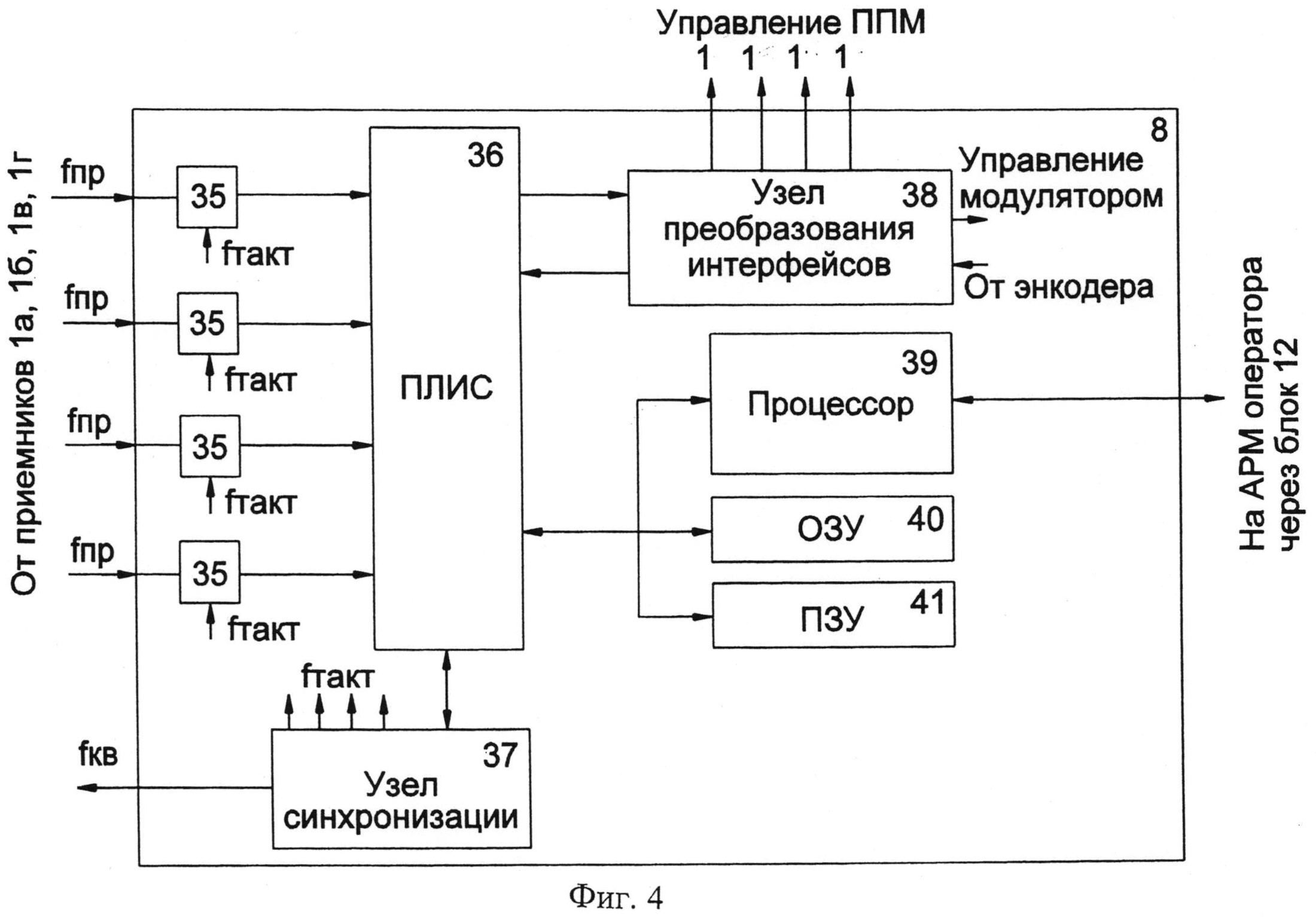
Один из вариантов выполнения блок-схемы БУПОС 8 приведен на фиг. 4. Указанный вариант содержит четыре АЦП 35 по числу приемных блоков 5 и, соответственно, подрешеток АФАР 1, программируемую логическую интегральную схему - ПЛИС 36, процессор 39, ОЗУ 40, ПЗУ 41, узел преобразования интерфейсов 38 и узел синхронизации 37. Узел синхронизации 37 в рассматриваемом варианте содержит кварцевый генератор высокостабильного сигнала (f кв), по которому организуется вся временная диаграмма работы радиолокатора, и формирует сигналы тактовой частоты (f такт) для АЦП 35. Кварцевый генератор с выходной частотой от 10 до 100 МГц может быть выполнен на основе микросхем фирм Epson и Geyer.
Узел синхронизации 37 может быть реализован на микросхемах распределения тактовых импульсов фирм Analog Devices и On Semiconductor. Узел преобразования интерфейсов 38 и процессор 39 может быть выполнен на однокристальных микропроцессорах фирм ARM и MIPS Technology. В качестве ПЛИС 36 могут быть использованы микросхемы типа VERTEX или ZYNQ-7000 фирмы Xilinx. В микросхему типа ZYNQ-7000 встроены два микропроцессора, в этом случае процессор 39 входит в состав ПЛИС (36).
Короткоимпульсный моноимпульсный радиолокатор с электронным сканированием в двух плоскостях функционирует следующим образом.
Модулятор 6 формирует зондирующие сигналы с несущей частотой fнес, заданной синтезатором 7 и в соответствии с сигналами управления от блока управления и первичной обработки 8. Синтезатор 7 имеет возможность перестройки f нес. Современная элементная база позволяет создать модулятор, формирующий разнообразные зондирующие сигналы: одиночный радиоимпульс длительностью от 2 наносек и более, пачку фазокодоманипулированных (ФКМ) радиоимпульсов с любой скважностью, импульсы с линейной частотной модуляцией (ЛЧМ), импульсно-допплеровские сигналы и др. Таким образом предлагаемое устройство обеспечивает создание многофункционального радиолокатора с большим разнообразием зондирующих сигналов. Сформированный модулятором сигнал поступает на вход делителя сигналов 14 между подрешетками и, через делители сигналов 4 в каждой подрешетке, на входы всех ППМ 2. В каждом ППМ, в зависимости от его местоположения в АФАР, аттенюаторами 15, 21 и фазовращателями 16, 22 зондирующему сигналу задается требуемая амплитуда и фаза по излучателям линейной антенной решетки, и соответственно по всему антенному полотну АФАР 1. Переключатели 26 при излучении сигнала в пространство установлены так, чтобы проникающий в приемный тракт сигнал попадал в нагрузку 36. Отраженный от объекта и принятый АФАР сигнал в каждой подрешетке после всех ППМ суммируется в сумматоре 3 и поступает на приемные блоки 5. При этом в каждом ППМ, в зависимости от его местоположения в АФАР, аттенюаторами 29, 33 и фазовращателями 28, 32 принятому сигналу задается требуемая амплитуда и фаза по излучателям линейной антенной решетки, и соответственно по всему антенному полотну АФАР 1. Переключатели 26 при приеме сигнала установлены так, чтобы поступающий в приемный тракт сигнал проходил через ППМ. В приемных блоках 5 принятый каждой подрешеткой сигнал на fнес преобразуется в сигнал на промежуточной частоте fпp и поступает на БУПОС 8, где оцифровывается с тактовой частотой ггакт.
БУПОС обеспечивает выполнение следующих задач:
- аналого-цифровое преобразование сигналов с выходов приемных блоков;
- прием управляющих команд с АРМ оператора;
- управление режимами работы и формирование временных диаграмм работы радиолокатора в соответствии с принятыми командами оператора;
- управление формированием передающей и приемной диаграмм направленности ФАР;
- управление формированием зондирующего сигнала для различных режимов работы радиолокатора;
- управление амплитудной характеристикой приемных блоков (АРУ);
- первичную цифровую обработку полученных сигналов и определение трехмерного положения объектов в пространстве и их вектора скорости.
Аналого-цифровое преобразование на промежуточной частоте позволяет исключить недостатки аналогового способа формирования квадратурных сигналов, такие как невысокие стабильность и линейность, неидентичность каналов, нарушение квадратуры, трудности фильтрации. Использование современной элементной базы (высокопроизводительных ПЛИС) при реализации алгоритмов квадратурной демодуляции сигнала позволяет снизить массу, габариты и цену устройства, существенно повысить его надежность. При аналого-цифровом преобразовании на промежуточной частоте спектр сигнала, во избежание спектральных искажений, должен располагаться в одной из спектральных зон Найквиста, и должно выполняться условие: fтакт=4fпр/(2i+1), где fпр - промежуточная частота сигнала, i=0, 1, 2, … Так, например, при промежуточной частоте fпр=900 МГц, i=4, тактовая частота для АЦП должна быть 400 МГц, что легко реализуется в АЦП фирмы Texas Instruments. Способ формирования отсчетов квадратурных составляющих при аналого-цифровом преобразовании сигнала на промежуточной частоте в предлагаемом радиолокаторе известен. (См. статья А. Парамонов, О. Куропаткин «Цифровая обработка при когерентной демодуляции сигналов» публикация 08.08.2007 на сайте www.gawhttp://gaw.ruru «Теоретические основы современной элементной базы высокоскоростных радиодемодуляторов»).
Далее в ПЛИС 36 формируются суммарная ДН (сигналы от подрешеток складываются), разностная азимутальная ДН (отдельно складываются сигналы от пар подрешеток, расположенных одна под другой, потом вычитаются), разностная угломестная ДН (отдельно складываются сигналы от пар подрешеток, расположенных рядом друг с другом, потом вычитаются).
В ПЛИС также реализованы модули управления ППМ и формирования зондирующих сигналов, быстродействующее оперативное запоминающее устройство (ОЗУ), модули формирования сигналов управления и обмена данными с другими блоками радиолокатора. ОЗУ предназначено для хранения оцифрованных радиолокационных сигналов предыдущих зондирований и совместно с процессором обеспечивает одновременные запись и чтение данных в темпе поступления. Сигналы управления, формируемые в ПЛИС, через узел преобразования интерфейсов поступают к соответствующим узлам и блокам радиолокатора. Ответные сигналы от узлов и блоков радиолокатора через этот же узел преобразования интерфейсов поступают на соответствующие входы ПЛИС. Узел синхронизации вырабатывает необходимые для работы БУПОС тактовые и опорные сигналы. Опорный синхросигнал узла синхронизации, предназначенный для других блоков и устройств радиолокатора, через формирователь-усилитель поступает на выход БУПОС. По управляющему интерфейсу узел синхронизации соединен с процессором. Процессор обработки и обмена информацией с АРМ обеспечивает взаимодействие с АРМ оператора, начальную инициализацию БУПОС, буферизацию данных первичной обработки и их частичную вторичную обработку, а также передачу обработанных данных в АРМ оператора. По алгоритмам первичной обработки, реализованным в ПЛИС первичной обработки, осуществляется: прием данных от АЦП, цифровая фильтрация через КИХ-фильтр с изменяемыми параметрами, прямое квадратурное детектирование либо квадратурное детектирование посредством гребенки полифазных фильтров, низкочастотная фильтрация через КИХ-фильтр, внутриимпульсное накопление. В случае обработки последовательности фазоманипулированных или ЛЧМ сигналов далее осуществляется сжатие сигнала через согласованный фильтр. Одновременно с приемом данных от АЦП, для предотвращения насыщения входного тракта и в зависимости от режима работы радиолокатора, осуществляется управление усилением приемников сигналов (ВАРУ).
Адаптивная пороговая обработка включает в себя вычисление модуля по квадратурным составляющим сигнала, вычисление адаптивного порога обнаружения в соответствии с заданными коэффициентами, а также выделение локального максимума в непрерывной зоне превышения модуля сигнала над адаптивным порогом. При адаптивной пороговой обработке в БУПОС предусмотрено задание набора параметров вычисления порогов, выбираемых в зависимости от режима работы и дальности зондирования. Квадратурные значения и модуль сигнала, соответствующие локальному максимуму, а также сопутствующая информация о вычисленном пороге, номере отсчета по дальности, текущей диаграмме направленности и пространственном положении АФАР запоминается в буферной памяти и используется для формирования отметки от объекта.
Измерение скорости цели в традиционных радиолокационных станциях осуществляется по доплеровской модуляции частоты отраженного импульса. Если скорость достаточно велика, то ее определение производится по одному зондирующему импульсу. При этом есть некоторая минимальная скорость, которая может быть измерена данным способом. Для небольших скоростей применяется также доплеровская оценка по нескольким импульсам пачки. Однако, в этом случае есть так называемые "слепые" скорости, когда фаза отраженного импульса меняется на целое число 2π от импульса к импульсу, и цель кажется неподвижной. При определенных условиях таких "слепых" скоростей может быть достаточно много. При моноимпульсной радиолокации наносекундными импульсами эти проблемы полностью снимаются, так как благодаря высокому разрешению по дальности определение скорости объектов происходит при наблюдении ее перемещения по точечным замерам.
Однако при первом обнаружении объекта требуется знать хотя бы направление его вектора скорости. При облучении малоразмерного движущегося объекта, например, пачкой ФКМ радиоимпульсов энергетический потенциал радиолокатора значительно снижается из-за того, что каждый отраженный импульс в пачке приобретает допплеровский фазовый набег и свертка пачки становится неоптимальной. На фиг. 5 представлены потери в энергетическом потенциале в зависимости от скорости объектов при различной длительности радиоимпульса в пачке из 256 импульсов, модулированной по закону М-последовательности. Из графиков видно, что при τимп=40 наносек при скорости объекта более 600 м/сек потери уже существенны.
В связи с этим в предлагаемом радиолокаторе организована многоканальная обработка входного сигнала в зависимости от скорости объектов. Сущность идеи поясняется на фиг. 6 (алгоритм суммарно-разностной обработки для упрощения не показан). Основная ветвь алгоритма состоит из ФНЧ 42, согласованного оптимального фильтра на одиночный импульс 43, квадратурного демодулятора 44, комплексного умножителя на «1» (в одноканальном варианте он, в общем случае, не нужен), согласованного фильтра на пачку импульсов 46, блока вычисления модуля комплексного числа 47 и порогового устройства 48. Далее формирователь отметки 49 для каждого объекта определяет всю матрицу координат. Многоканальность по скорости объектов вводится после квадратурного демодулятора 44. Слева от основной ветви алгоритма комплексные умножители 45 получают отрицательные допплеровские фазовые приращения ψдоп, 2 ψдоп, и. т.д., а справа - положительные. В результате, в одном из каналов пачка импульсов свернется оптимально и на выходе порогового устройства 48 сигнал по амплитуде будет больше, чем в других, а знак вектора скорости будет определен однозначно (объект приближается или удаляется). Дискрет фазового приращения ψдоп выбирается исходя из производительности ПЛИС. Для сведения, в ПЛИС ZYNQ-7000 встроены готовые умножители в количестве 900 единиц. Обзор пространства в предлагаемом радиолокаторе производится во всей верхней полусфере следующим образом. Электронно-управляемый главный луч диаграммы направленности последовательно сканирует весь заданный угломестный сектор, потом передвигается на ширину луча по азимуту и снова сканирует весь угломестный сектор. И так до предельного угла азимута, при котором появляется первый дифракционный луч, после чего опорно-поворотное устройство доворачивает полотно АФАР по азимуту, что обеспечивает бездифракционное сканирование вкруговую.
Использование предлагаемого изобретения позволяет расширить функциональные возможности устройства за счет высокоточного измерения трехмерного положения объектов в пространстве и их скорости.
Способ регистрации отраженного сигнала при радиолокации
Радиолокатор с фазированной антенной решеткой и системой тестирования ее каналов
Устройство передачи аварийных сигналов-ретранслятор
Центральная управляющая система системы контроля безопасности и связи пассажирского поезда
Комплексная система глонасс/gps+gsm-900/1800
Способ регистрации отраженного сигнала при радиолокации
Радиолокатор с фазированной антенной решеткой и системой тестирования ее каналов
Устройство передачи аварийных сигналов-ретранслятор
Центральная управляющая система системы контроля безопасности и связи пассажирского поезда

