Результат интеллектуальной деятельности: СПОСОБ ИНФОРМАЦИОННОГО ОБМЕНА С ИСПОЛЬЗОВАНИЕМ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ БОЕВОЙ РОБОТИЗИРОВАННОЙ ПЛАТФОРМЫ
Вид РИД
Изобретение
Изобретение относится к дистанционно управляемым боевым роботизированным платформам, предназначенным для решения задач силовых структур РФ, в частности к способам их программного обеспечения и информационного обмена данными.
Известен способ эксплуатации технической установки и система управления процессом эксплуатации технической установки (см. патент RU 2273874 C2, МПК G05B 19/418, опубл. 10.04.2006 г., Бюл. №10), принятый за прототип.
Изобретение относится к области систем автоматического управления технологическими процессами. В соответствующем изобретению способе используется, по меньшей мере, одна управляющая вычислительная машина (блок ЭВМ) и некоторое количество полевых приборов (периферийные устройства), причем сигналы состояния и управляющие сигналы между, по меньшей мере, частью полевых приборов и управляющей вычислительной машиной передают с применением протокола TPC/IP через канал связи, предпочтительно радиосвязи и/или Интернет. Соответствующая изобретению система управления процессом содержит управляющую вычислительную машину с Web-сервером, вычислительную машину клиента с браузером Интернета, а также множество сенсоров и позиционеров; система управления процессом является предпочтительно обслуживаемой посредством Интернета через вычислительную машину клиента.
Передача информации по проводным и беспроводной линиям связи и формирование пакетов для передачи данных по указанным линиям осуществляется согласно протоколам передачи данных.
Недостатками прототипа являются:
- высокая конфигуративная сложность системы;
- недостаточная степень надежности работы используемой информационно-вычислительной системы;
- отсутствие модульного принципа программирования;
- недостаточное количество реализованных алгоритмов.
Предлагаемым изобретением решается задача по повышению эффективности и надежности информационной системы дистанционно управляемой боевой роботизированной платформы.
Технический результат, получаемый при осуществлении изобретения, заключается в создании способа информационного обмена и программного обеспечения боевой роботизированной платформы, обеспечивающего согласование и усиление сигналов платформы и ее бортового вычислителя, дистанционное ручное и полуавтоматической управление платформой, навигацию по данным GPS/ГЛОНАСС, обработку данных с диагностических датчиков шасси платформы, информационный обмен между пультом дистанционного управления и бортовым вычислителем, выявление возникших неисправностей.
Указанный технический результат достигается тем, что в предлагаемом способе информационного обмена и программного обеспечения боевой роботизированной платформы, включающем в себя блок ЭВМ и периферийные устройства, установленные на объекте управления и взаимодействующие между собой по каналу связи посредством взаимообмена сигналами управления и состояния в соответствии с протоколом обмена согласно программному обеспечению, новым является то, что объект управления, выполненный в виде подвижной боевой роботизированной платформы с системой вооружения, оснащен блоком управления и согласования, который осуществляет согласование уровней диагностических сигналов датчиков подвижной платформы и бортового вычислителя, а также усиление сигналов бортового вычислителя, в свою очередь связанного по каналу связи с дистанционно расположенным управляющим блоком ЭВМ, и выдачу их на исполнительные устройства платформы, основная программа управления боевой роботизированной платформой создана в виде главного окна с вкладками, содержащими различные элементы управления, что позволяет реализовать выполнение следующих алгоритмов: управление с блока ЭВМ через бортовой вычислитель подвижной платформой в ручном или полуавтоматическом режиме, осуществление навигации по данным GPS/ГЛОНАСС, отслеживание информации об ошибках работы джойстика блока ЭВМ и сети, за счет обработки данных с датчика низкого давления двигателя шасси - выполнение запуска двигателя и переключение передач, за счет обработки данных со спидометра и тахометра - выполнение расчета скорости.
Оснащение объекта управления, выполненного в виде подвижной боевой роботизированной платформы с системой вооружения, блоком управления и согласования, позволяет:
- осуществлять согласование уровней диагностических сигналов датчиков подвижной платформы и бортового вычислителя,
- выдачу сигналов бортового вычислителя на исполнительные устройства платформы.
Выполнение основной программы управления боевой роботизированной платформой в виде главного окна с вкладками, содержащими различные элементы управления, позволяет:
- обеспечить удобство и наглядность управления;
- обеспечить оперативный переход из одного режима управления в другой;
- контролировать состояние платформы.
Выполнение программного обеспечение блока ЭВМ с возможностью управление с блока ЭВМ подвижной платформой и системой вооружения в ручном или полуавтоматическом режиме позволяет:
- в ручном режиме оператору непосредственно подавать управляющие команды на подвижную платформу, контролировать их выполнение на основе информации системы технического зрения и системы датчиков контроля различных узлов платформы;
- в полуавтоматическом режиме ставить платформе задание (например, патрулирование территории), после чего она самостоятельно его выполняет, а в случае сложных ситуаций (невозможности рассчитать траекторию объезда препятствия, предупреждающих сигналов от датчиков контроля) подавать запрос на помощь.
Выполнение программного обеспечение блока ЭВМ с возможностью осуществления навигации по данным GPS/ГЛОНАСС позволяет:
- сохранять географические координаты текущего местоположения платформы;
- движение по заданным координатам;
- на экране блока ЭВМ в реальном времени обозначать траекторию движения платформы.
Выполнение программного обеспечение блока ЭВМ с возможностью отслеживания информации об ошибках работы джойстика блока ЭВМ и сети позволяет:
- получать визуальную информацию об ошибках работы джойстика и сети;
- при наличии ошибок получать логи событий.
Реализация алгоритмов запуска двигателя и переключения передач за счет обработки данных с датчика низкого давления позволят осуществлять данные операции дистанционно.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
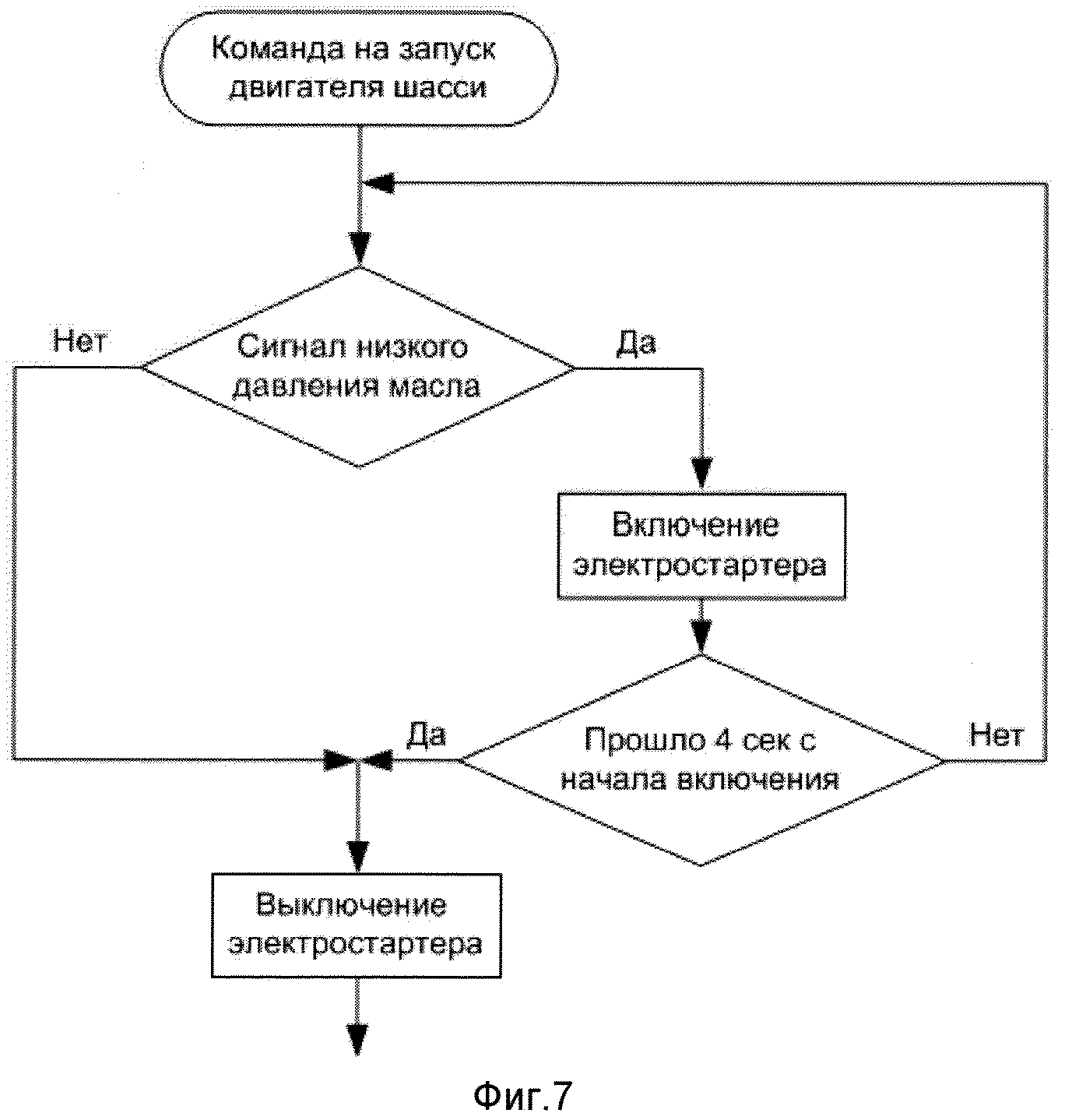
Сущность изобретения поясняется чертежами, где на фиг.1 показана схема информационного обмена боевой роботизированной платформы; на фиг.2 - вкладка GPS/ГЛОНАСС навигации; на фиг.3 - вкладка ручного управления; на фиг.4 - вкладка обмена данными; на фиг.5 - вкладка полуавтоматического движения; на фиг.6 - вкладка лога ошибок; на фиг.7 - алгоритм запуска двигателя шасси; на фиг.8 - алгоритм переключения передач; на фиг.9 - обобщенный алгоритм обработки данных с датчиков спидометра и тахометра шасси.
Способ информационного обмена и программного обеспечения боевой роботизированной платформы реализуется следующим образом.
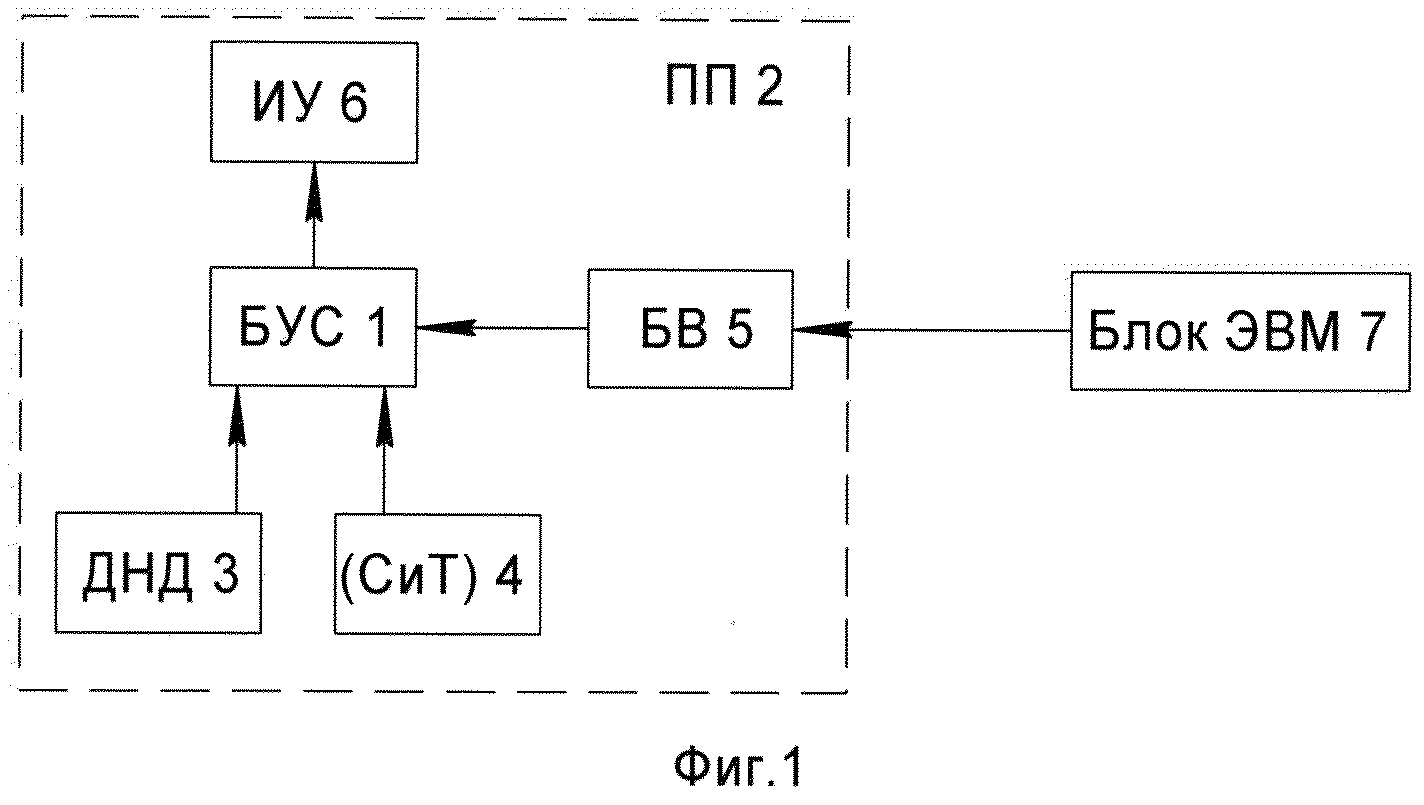
Блок управления и согласования (БУС) 1 предназначен для согласования уровней диагностических сигналов датчиков подвижной платформы (ПП) 2: датчика низкого давления (ДНД) 3, спидометра и тахометра (С и Т) 4 и бортового вычислителя (БВ) 5, а также усиления сигналов БВ 5 и выдачу их на исполнительные устройства (ИУ) 6.
На боевой роботизированной платформе реализованы задачи ручного и полуавтоматического режимов управления.
В ручном режиме оператор с дистанционно расположенного блока ЭВМ 7 непосредственно подает управляющие команды на ПП 2, контролирует их выполнение на основе информации системы технического зрения и системы датчиков контроля различных узлов платформы.
В полуавтоматическом режиме ПП 2 ставится задание (например, патрулирование территории), и она самостоятельно его выполняет. Оператор при необходимости переводит ПП 2 в режим ручного управления, корректирует состояние ПП 2 до такого, при котором возможно дальнейшее автоматическое управление, и включает его.
Интерфейс программы управления создан в программном пакете с использованием стандартных библиотек компонентов.
Основная программа создана в виде главного окна с вкладками, содержащими различные элементы управления, которые позволяют реализовать тот или иной алгоритм.
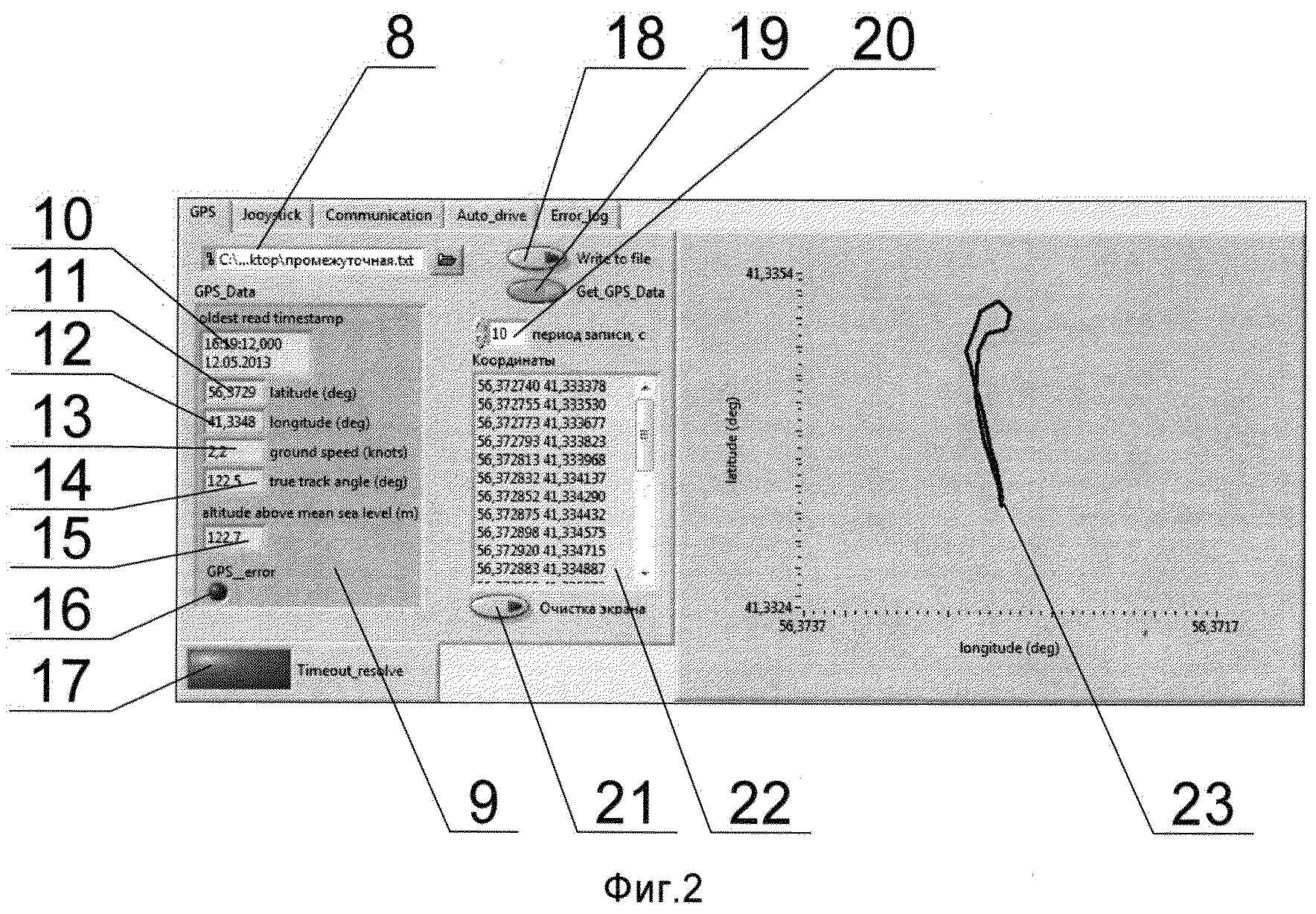
Во вкладке GPS/ГЛОНАСС навигации присутствуют: 8 - строка выбора файла записи массива точек, 9 - блок данных с GPS/ГЛОНАСС, 10 - дата и время, 11 - широта, 12 - долгота, 13 - скорость, 14 - азимут, 15 - высота над уровнем моря, 16 - ошибка GPS; 17 - индикатор потери сигнала; 18 - кнопка записи координат в файл; 19 - кнопка включения GPS; 20 - период записи точек; 21 - кнопка очистки экрана; 22 - список запомненных точек; 23 - пройденная траектория.
Работа подпрограммы GPS/ГЛОНАСС навигации осуществляется следующим образом.
После запуска главной программы необходимо нажать кнопку 19 для включения подпрограммы GPS/ГЛОНАСС навигации. После установления соединения со спутниками в информационных полях блока 9 появятся навигационные данные. В окне 22 с интервалом, заданным в строке 20, будут сохраняться географические координаты текущего местоположения ПП 2. На экране 23 в реальном времени прорисовывается траектория движения ПП 2. В случае потери связи с блоком навигации загорается красный сигнал ошибки соединения 17. В случае потери соединения со спутниками или другой ошибки блока навигации загорается сигнал ошибки 16. Нажав на кнопку 21, можно очистить окно запомненных координат. Для сохранения массива координат в файл нужно выбрать имя файла в строке 10 и нажать кнопку 18 записи в файл.
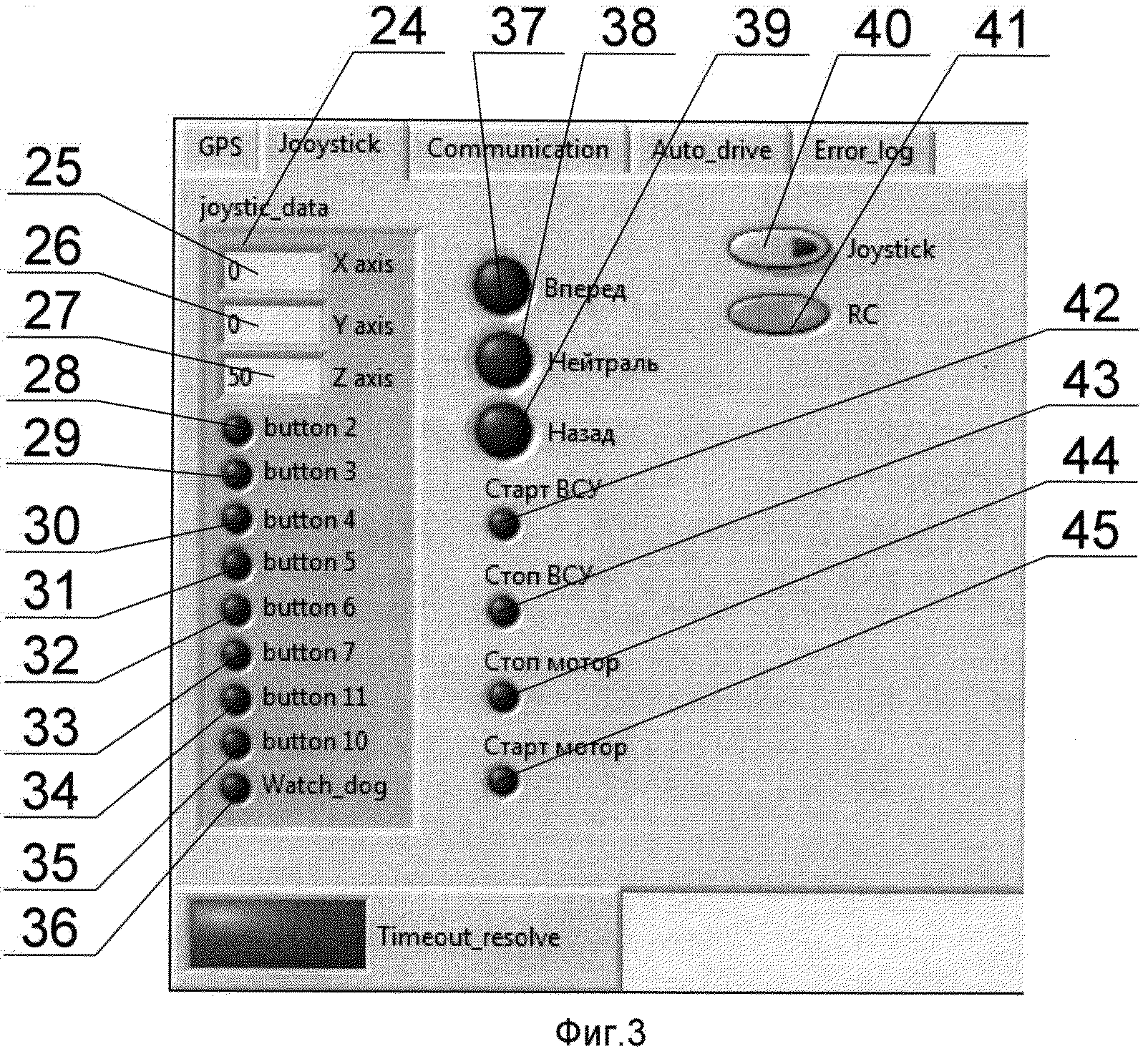
Во вкладке ручного управления присутствуют: 24 - блок данных с джойстика; 25 - положение оси X; 26 - положение оси Y; 27 - положение оси Z; 28 - кнопка 2; 29 - кнопка 3; 30 - кнопка 4; 31 - кнопка 5; 32 - кнопка 6; 33 - кнопка 7; 34 - кнопка 11; 35 - кнопка 10; 36 - сигнал Watch_dog; 37 - индикатор «Вперед»; 38 - индикатор «Нейтраль»; 39 - индикатор «Назад»; 40 - переключатель на управление с джойстика; 41 - переключатель на управление с радиопульта; 42 - индикатор «Старт ВСУ»; 43 - индикатор «Стоп ВСУ»; 44 - индикатор «Стоп мотор»; 45 - индикатор «Старт мотор».
После включения основной программы кнопками 40, 41 выбирается устройство управления: джойстик или радиопульт. Индикаторы 37, 38, 39, 42, 43, 44, 45 показывают выполнение соответствующих процессов: движение вперед, переключение на нейтральную передачу, движение назад, старт внешней силовой установки - генератора (ВСУ), остановка ВСУ, остановка мотора, запуск мотора. Кнопки 28…36 используются при настройке.
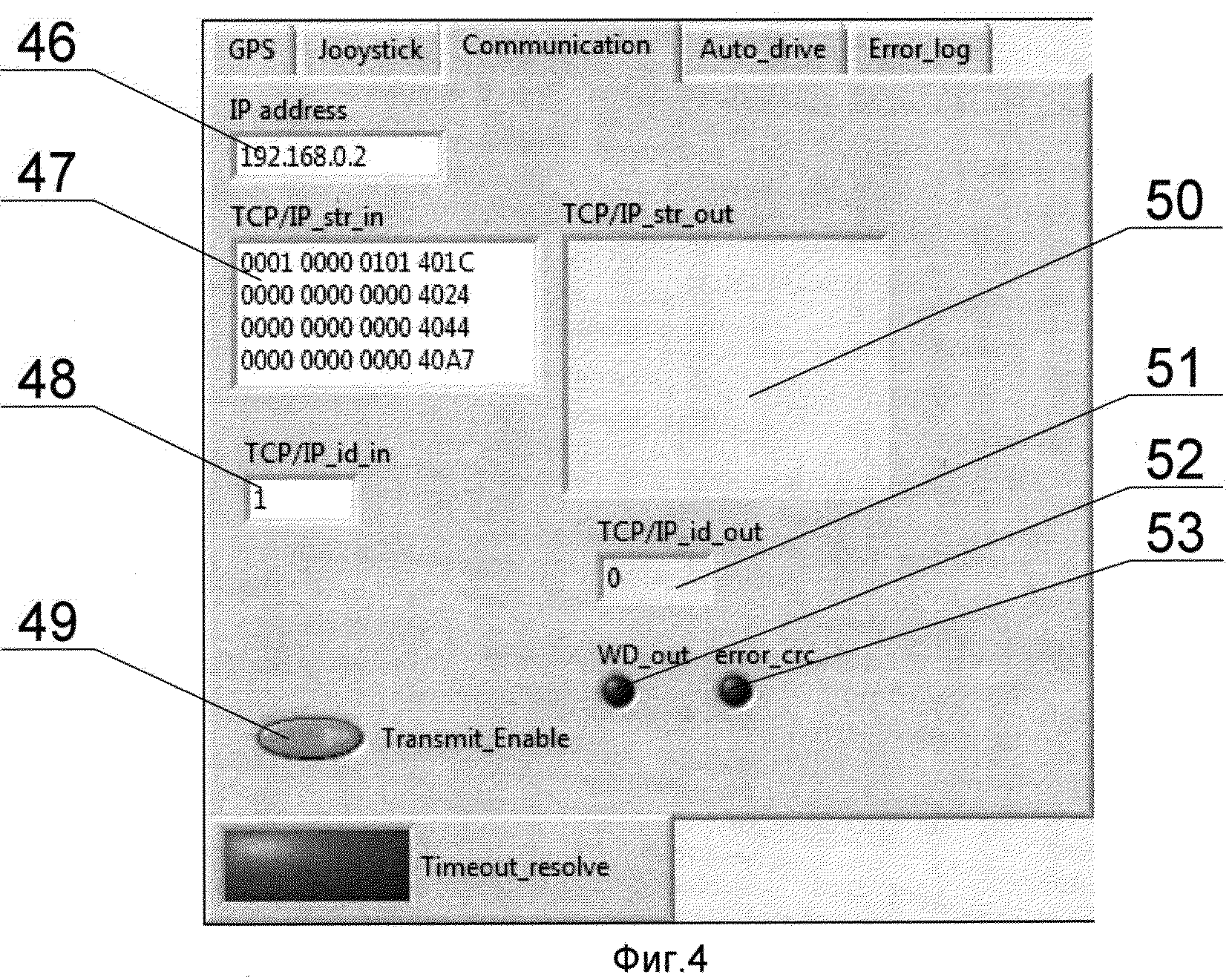
Вкладка обмена данными содержит основные элементы обмена данными между блоком ЭВМ 7 и БВ 5: 46 - IP-адрес БВ 5; 49 - передаваемые пакеты; 48 - ID операции отправки; 49 - кнопка включения передачи данных; 50 - получаемые пакеты; 51 - ID операции получения; 52 - индикатор Watch_dog; 53 - индикатор ошибки.
В строку 46 заносится IP-адрес платы бортового вычислителя 5 для установления соединения. Кнопка 47 включает передачу данных от блока ЭВМ 7 на БВ 5. Строка 48 содержит ID операции, которой принадлежит отправляемый пакет (например, ID=1 соответствует запросу координат GPS/ГЛОНАСС). В окне 47 отображается содержимое посылаемого пакета. Строка 51 содержит ID операции, которой принадлежит принимаемый пакет, содержимое которого отображается в окне 50. Индикаторы 52 и 53 отображают потерю соединения и неустановленную ошибку связи соответственно.
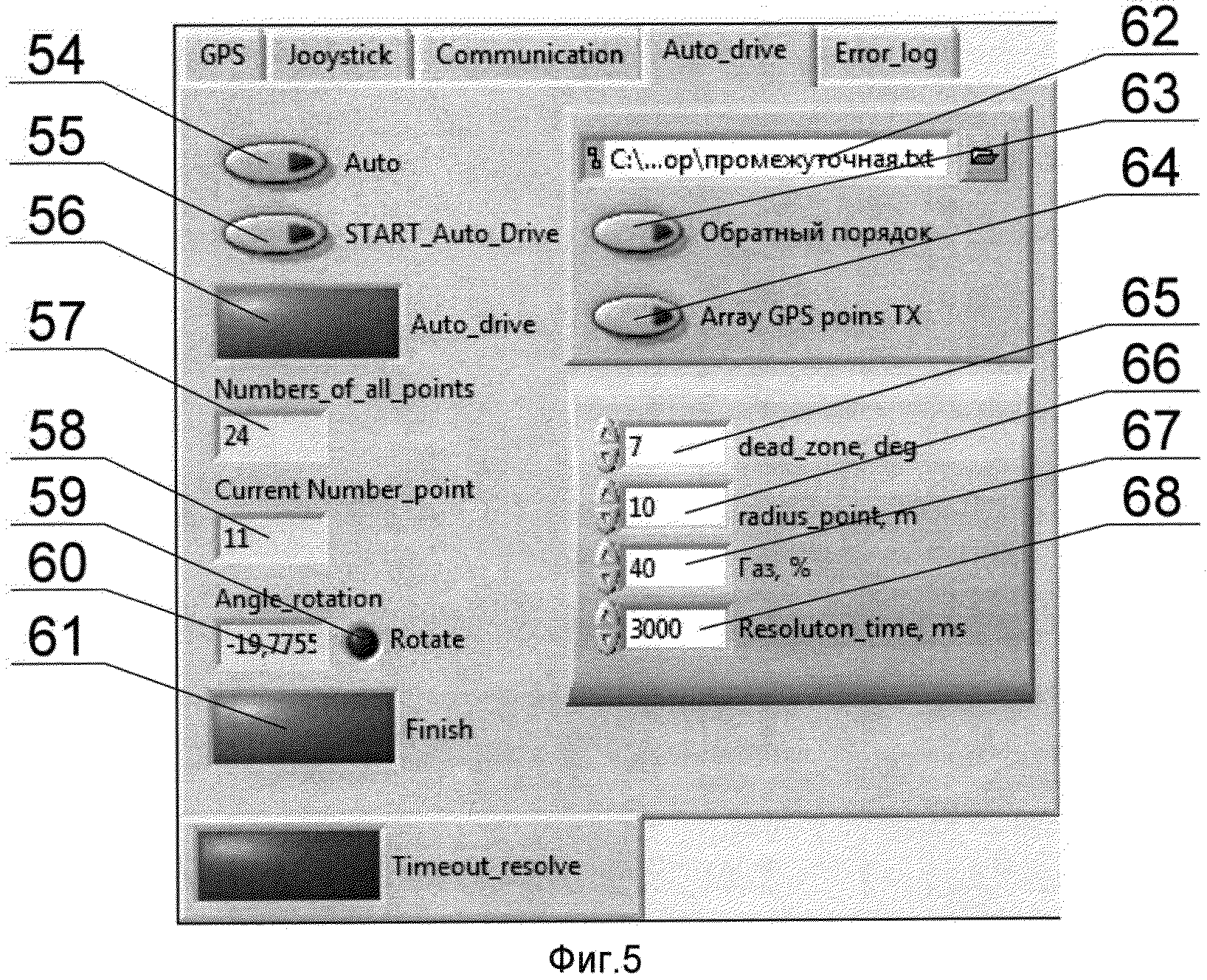
Во вкладке полуавтоматического движении присутствуют: 54 - кнопка переключения в полуавтоматический режим; 55 - кнопка запуска платформы в автоматическом режиме, 56 - индикатор работы платформы в полуавтоматическом режиме, 57 - количество заданных точек, 58 - порядковый номер текущей точки-цели, 59 - индикатор поворота, 60 - угол поворота, 61 - индикатор прибытия в конечную точку, 62 - строка выбора массива точек, 63 - кнопка включения обратного порядка проезда точек, 64 - загрузка массива точек, 65 - «Мертвая зона» GPS/ГЛОНАСС, 66 - радиус погрешности достижения точки, 67 - уровень подачи топлива, 68 - время между опросами GPS/ГЛОНАСС.
В строке 62 выбирается файл, содержащий массив точек маршрута, включается кнопка обратного порядка их прохода, если необходимо, кнопкой 63. Кнопкой 54 включается режим автоматического управления, кнопкой 55 запускается выполнение программы прохода точек. Индикатор 56 информирует о том, что платформа выполняет задание в автоматическом режиме. По окончанию выполнения задания загорается индикатор 61. Остальные элементы отображают промежуточные значения использующихся переменных.
Во вкладке лога ошибок присутствуют: 69 - блок ошибки джойстика, 70 - блок ошибки соединения, 71, 72 - индикатор наличия ошибки, 73, 74 - код ошибки, 75, 76 - лог событий.
Блоки 69 и 70 содержат информацию об ошибках работы джойстика и сети соответственно. Индикаторы 71 и 70 сигнализируют о наличии или отсутствии ошибок, строки 71 и 74 содержат код ошибки, а окна 75 и 76 - логи событий.
Обработка данных датчика ДНД 3 масла происходит следующим образом. ДНД 3 масла установлен в двигателе шасси ПП 2. При незаведенном двигателе с ДНД 3 поступает единичный сигнал низкого давления масла. Данный сигнал используется в алгоритмах запуска двигателя шасси и переключения передач.
Алгоритм запуска двигателя ПП 2: с блока ЭВМ подается команда на запуск двигателя ПП 2. Запуск продолжается до тех пор, пока не пропадет сигнал низкого давления масла либо не пройдет 4 секунды с начала пуска.
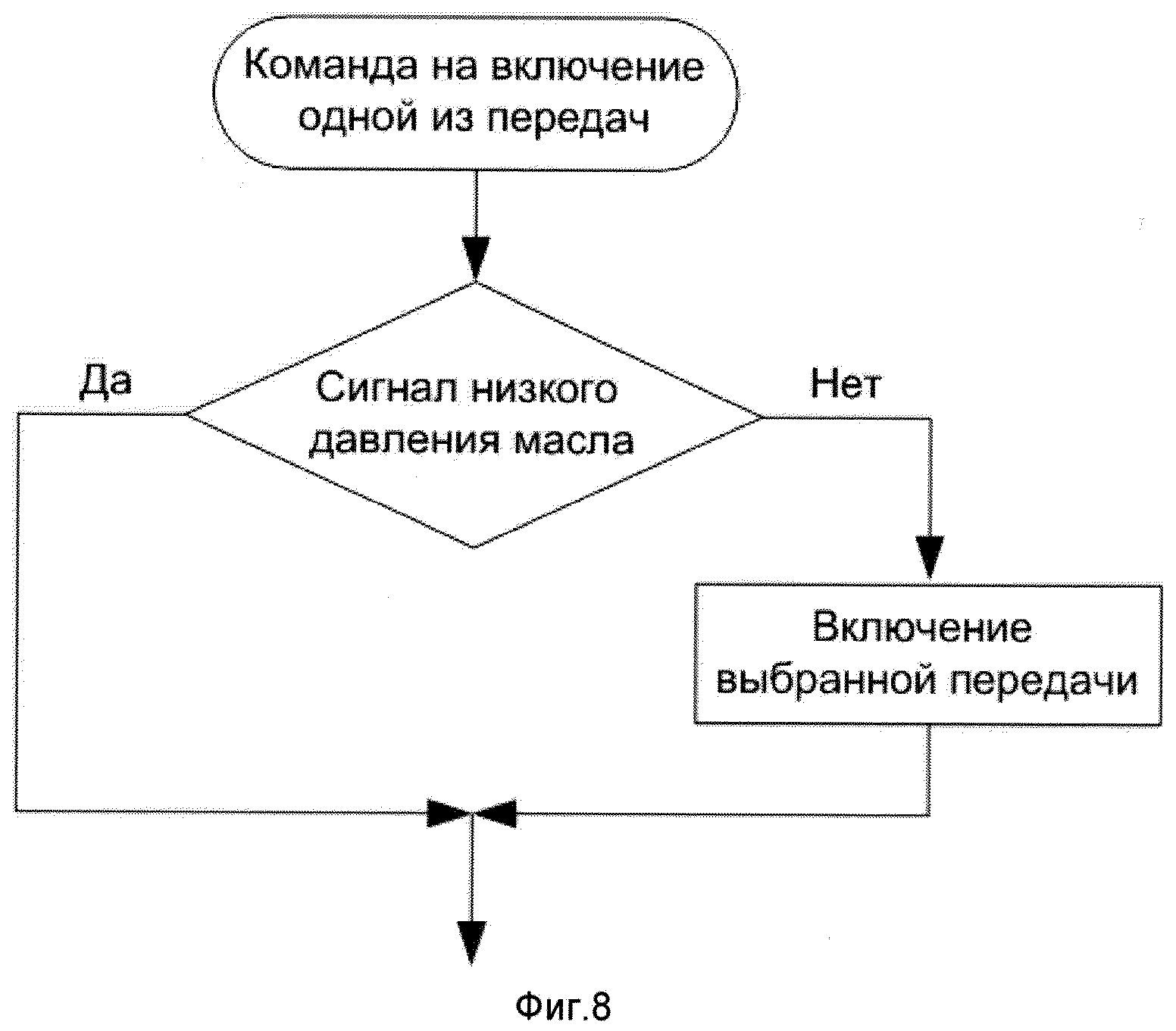
Переключение передач ПП 2 должно происходить только на включенном двигателе. Поэтому при наличии сигнала низкого давления масла передачи не переключаются.
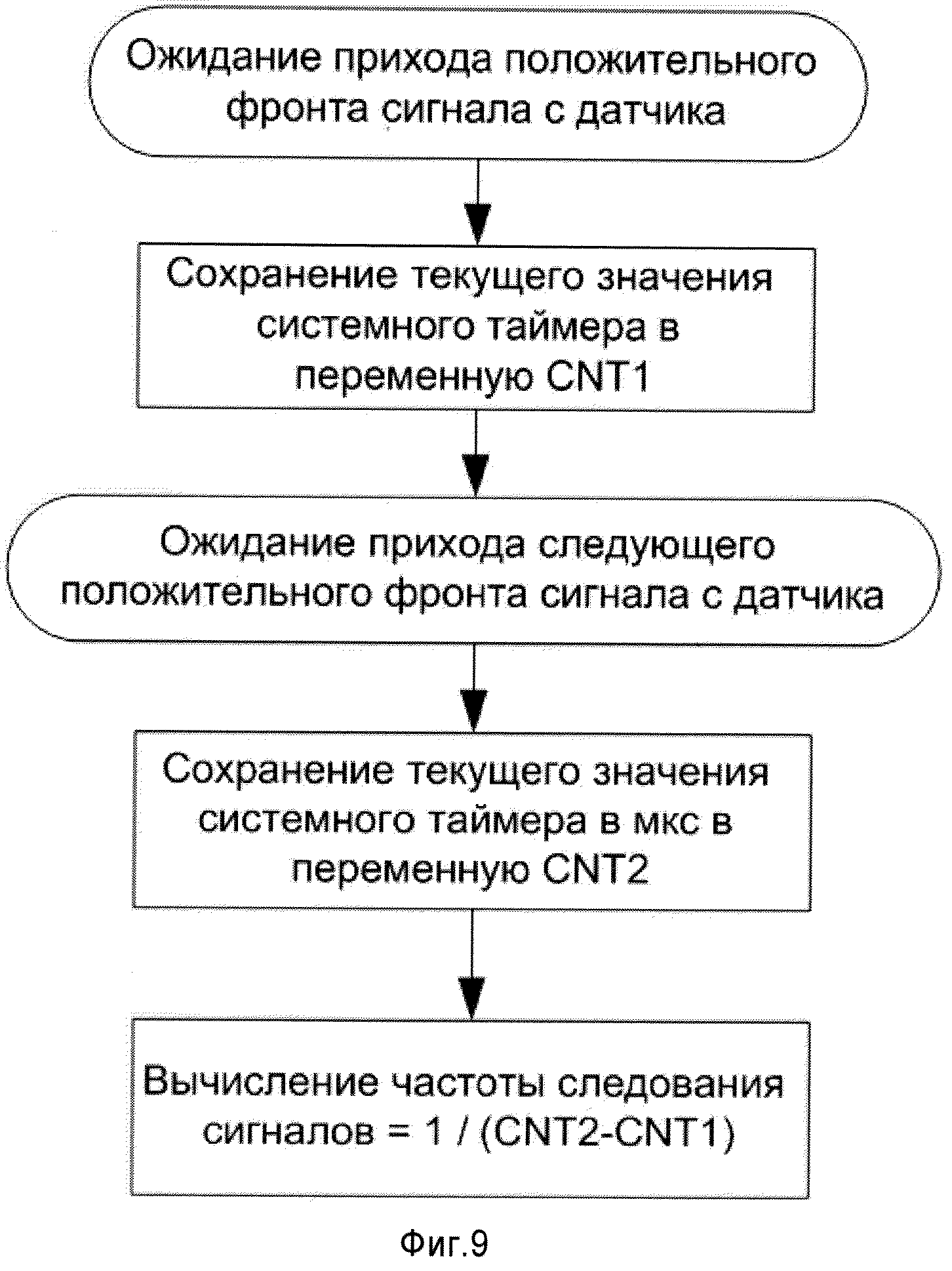
Сигналы с С и Т 4 шасси ПП 2 имеют прямоугольную форму с частотой, прямо пропорциональной данным оборотов коленчатого вала двигателя и скорости движения ПП 2.
Обобщенный алгоритм расчета частоты: ожидание прихода положительного фронта сигнала с С и Т 4, сохранение текущего значения системного таймера в переменную CNT 1, ожидание прихода следующего положительного фронта сигнала с С и Т 4, сохранение текущего значения системного таймера в переменную CNT 2, вычисление частоты следования сигналов.
В полуавтоматическом режиме боевой роботизированный комплекс получает задание, основанное на координатах GPS/ГЛОНАСС, например следование к заданной точке или патрулирование траектории, установленной по нескольким опорным точкам. В процессе выполнения задания БВ 5 обрабатывает информацию с датчиков и корректирует траекторию движения ПП 2, избегая столкновения с препятствиями. В случае отсутствия решения по алгоритму объезда или в другой нештатной ситуации (например, нулевые показания скорости при движении вперед на полной мощности - ПП 2 пробуксовывает) передается сигнал помощи на операторский пункт, и ПП 2 переходит в режим ручного управления, ожидая ответа оператор.
В ручном режиме реализуются следующие команды, заложенные в программе управления: запуск/остановка двигателя ПП 2, включение передней передачи, включение задней передачи, поворот налево/направо, включение нейтральной передачи, полный газ, соответствующий уровень подачи топлива, холостой ход, полный тормоз.
При проведении автоматического управления задается маршрут путем выбора списка точек, запускается программа автоматического прохода точек, контролируется выполнение прохождения маршрута.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании способа информационного обмена и программного обеспечения боевой роботизированной платформы, обеспечивающего согласование и усиление сигналов платформы и ее бортового вычислителя, дистанционное ручное и полуавтоматической управление платформой, навигацию по данным GPS/ГЛОНАСС, обработку данных с диагностических датчиков шасси платформы, информационный обмен между пультом дистанционного управления и бортовым вычислителем, выявление возникших неисправностей.
Способ информационного обмена и программного обеспечения боевой роботизированной платформы, включающий в себя блок ЭВМ и периферийные устройства, установленные на объекте управления и взаимодействующие между собой по каналу связи посредством взаимообмена сигналами управления и состояния в соответствии с протоколом обмена согласно программному обеспечению, отличающийся тем, что объект управления, выполненный в виде подвижной боевой роботизированной платформы с системой вооружения, оснащен блоком управления и согласования, который осуществляет согласование уровней диагностических сигналов датчиков подвижной платформы и бортового вычислителя, а также усиление сигналов бортового вычислителя, в свою очередь связанного по каналу связи с дистанционно расположенным управляющим блоком ЭВМ, и выдачу их на исполнительные устройства платформы, основная программа управления боевой роботизированной платформой создана в виде главного окна с вкладками, содержащими различные элементы управления, что позволяет реализовать выполнение следующих алгоритмов: управление с блока ЭВМ через бортовой вычислитель подвижной платформой в ручном или полуавтоматическом режиме, осуществление навигации по данным GPS/ГЛОНАСС, отслеживание информации об ошибках работы джойстика блока ЭВМ и сети, за счет обработки данных с датчика низкого давления двигателя шасси - выполнение запуска двигателя и переключение передач, за счет обработки данных со спидометра и тахометра - выполнение расчета скорости.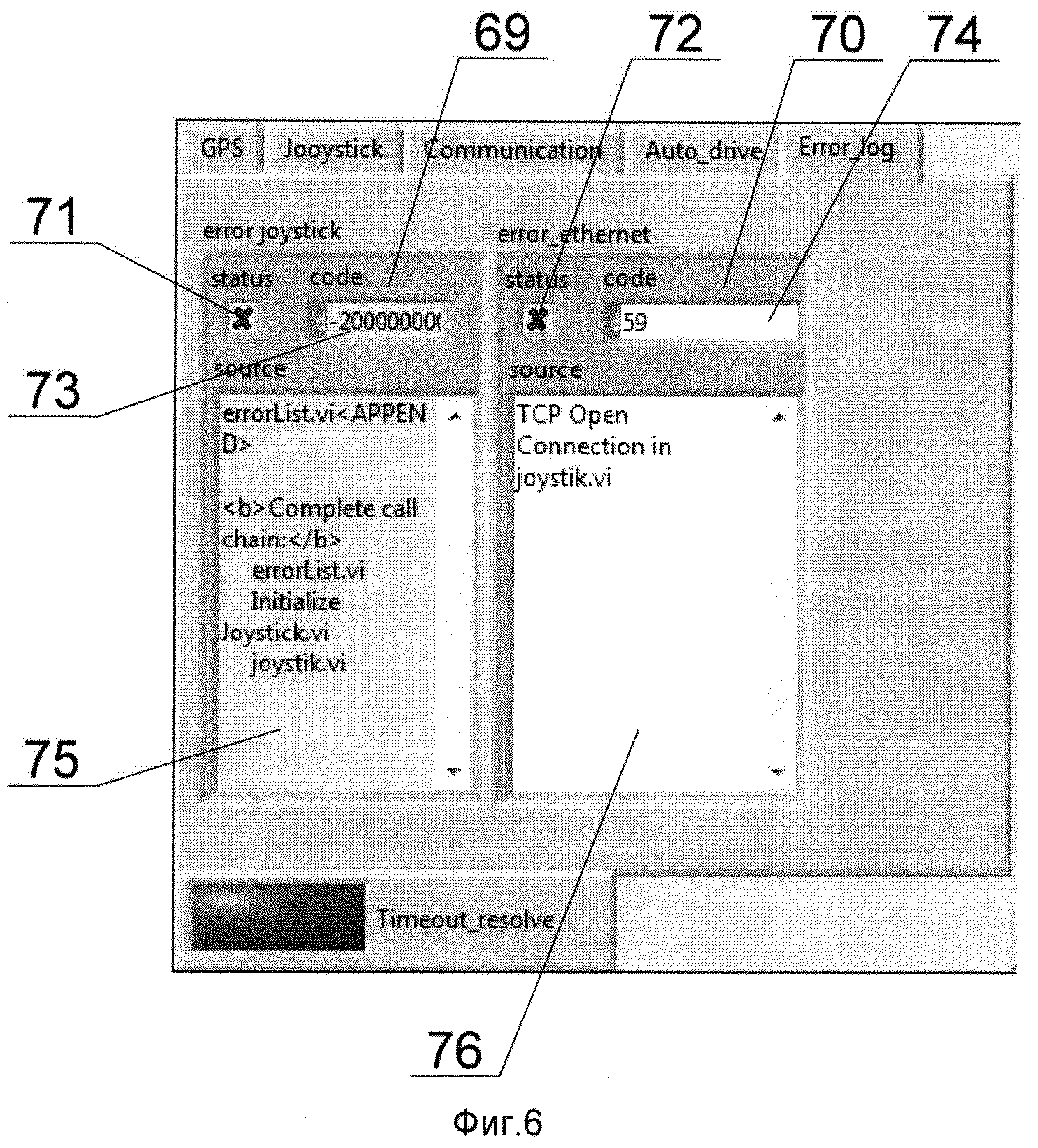
Торовый нагреватель жидкости
Оправка для ротационного выдавливания
Шахтная печь сопротивления для термической обработки высокоточных тонкостенных деталей
Мобильная тепловая станция
Способ получения заготовок дамасской стали
Привод генератора системы электроснабжения мобильного комплекса топопривязки
Автономная система электроснабжения мобильного комплекса топопривязки
Модуль для установки и транспортирования выносного оборудования в кузове-фургоне специального транспортного средства
Дульное устройство
Стол поворотный
Электроспусковой механизм
Высокоскоростной вихревой нагреватель
Гидрокавитационный механический теплогенератор
Механизм дистанционного взведения оружия
Съемный регулируемый плечевой упор
Способ преобразования энергии гидропотока и вихревая гидротурбина для его реализации
Теплопарогенератор
Устройство для установки в нем пусковой трубы с ракетой индивидуального использования
Устройство для автоматического снятия передней крышки с пусковой трубы переносного зенитного ракетного комплекса (пзрк)
Струйно-вихревой топливовоздушный смеситель

