Результат интеллектуальной деятельности: БУКСИРОВЩИК ВОДОЛАЗА
Вид РИД
Изобретение
Изобретение относится к подводным аппаратам и предназначено для погружения, плавания под водой и всплытия в надводное положение водолаза.
Известен буксировщик водолаза, содержащий акваланг, движитель с пневматическим двигателем его привода, установленным на баллоне акваланга и сообщенным с этим баллоном через вентиль, а также сообщенным с клапанной коробкой акваланга для подачи отработанного воздуха водолазу, причем двигатель сообщен с клапанной коробкой акваланга через эластичную емкость и выполнен в виде поршневого механизма с поршневой группой и золотниковым клапанным механизмом, а движитель выполнен в виде плавника, шток которого шарнирно закреплен на фундаменте поршневой группы с возможностью перемещения с ее поршнями, при этом указанный шток посредством штифта связан с коромыслом упомянутого клапанного механизма (Патент на изобретение РФ №2293684, B63C 11/46).
Недостаток аналога - сложная конструкция двигателя, который выполнен в виде поршневого механизма с поршневой группой и золотниковым клапанным механизмом.
Наиболее близким к предлагаемому изобретению является буксировщик водолаза, содержащий прочный корпус с рукоятками, гребной электродвигатель и движительный комплекс, отличающийся тем, что в кормовой части корпуса выполнена продольная по форме тела вращения выгородка с переборкой, ось симметрии которой смещена вниз относительно горизонтальной оси симметрии прочного корпуса, гребной электродвигатель выполнен погружным и установлен в выгородке в пределах продольного габарита корпуса, при этом буксировщик снабжен выполненными заодно с рукоятками полозами-опорами, установленными под углом к продольной оси буксировщика, причем проекция оси полоза на диаметральную плоскость и линия, соединяющая крайние нижние точки движителя и корпуса, не пересекаются в пределах габаритов буксировщика (Патент на изобретение РФ №2005643, B63C 11/46).
Недостаток прототипа - отсутствие системы управления остаточной плавучестью, которая позволяет вертикально погружаться и всплывать, а также плавать на заданной глубине и удерживать аппарат руками.
Техническим результатом заявляемого изобретения является повышение маневренности водолаза за счет использования системы управления остаточной плавучестью и освобождение рук водолаза от рукояток.
Для достижения указанного технического результата в буксировщике водолаза, содержащем прочный корпус, погружной электродвигатель, движитель, аккумуляторные батареи, причем он снабжен легким корпусом, поясным ремнем, баллоном сжатого воздуха и системой управления остаточной плавучестью, прочный корпус выполнен в виде пустотелого цилиндра с верхним и нижним полушарами, вершины которых соединены трубой, в которой установлен движитель, выполненный в виде пустотелой винтовой трубы с волом, установленным с возможностью вращения от реверсивного погружного электродвигателя, легкий корпус повторяет форму прочного корпуса и установлен с зазором, равным h, огибая поверхность прочного корпуса, и имеет на боковой поверхности отверстия в зоне оснований полушаров, система управления остаточной плавучестью включает емкость с отверстиями в днище, размещенную в верхнем полушаре легкого корпуса, и эжектор в виде трубопровода, входной патрубок которого размещен в полости емкости и сообщается через регулируемый ручной дроссель с выходным патрубком, который размещен в трубе за движителем, баллон сжатого воздуха установлен в прочном корпусе и сообщается трубопроводом через регулируемый ручной дроссель с полостью емкости.
Кроме того, заявленное решение имеет факультативные признаки, характеризующие его частные случаи, а именно:
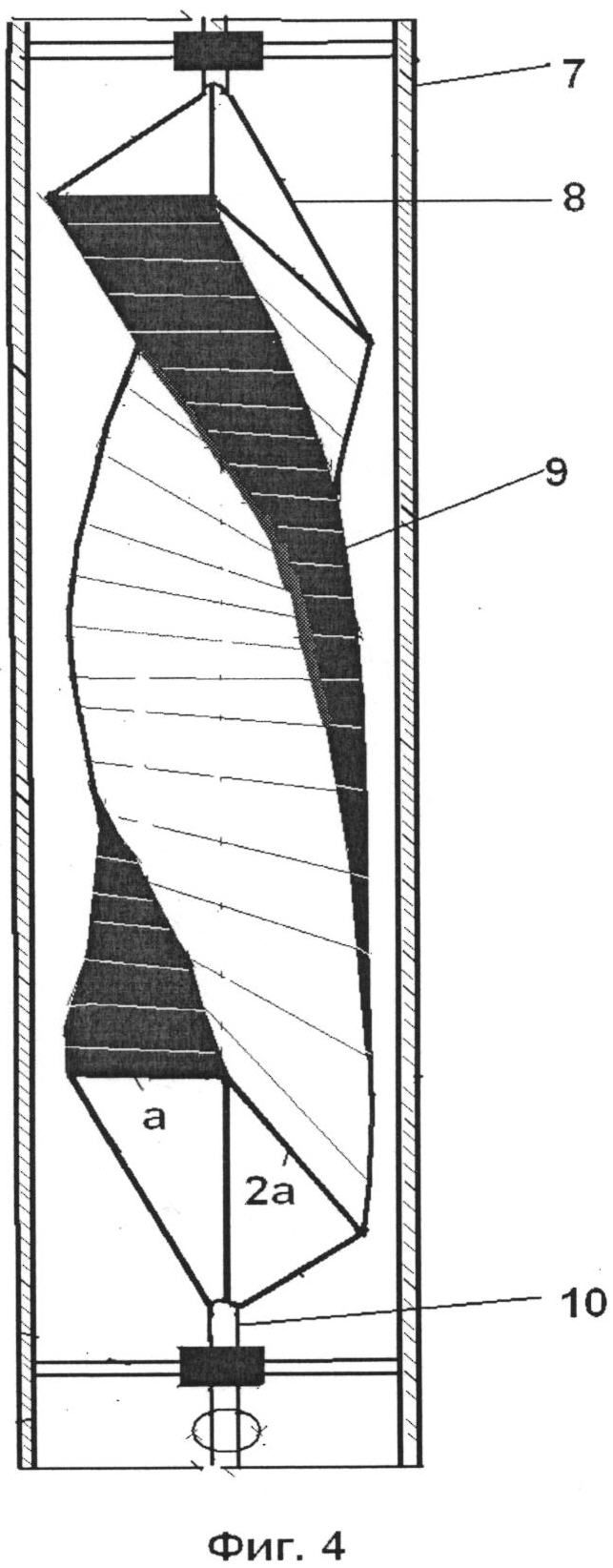
- пустотелая винтовая труба имеют прямоугольное поперечное сечение a×2a, а стенки лопасти закручены по длине на угол от 0 до 180°;
- боковая поверхность пустотелой винтовой трубы покрыта медно-никелевым сплавом;
- легкий корпус изготовлен из прочного гибкого пластика не подверженного биообрастанию;
- прочный корпус изготовлен из нержавеющей стали.
Отличительными признаками предлагаемого изобретения является то, что оно снабжено легким корпусом, поясным ремнем, баллоном сжатого воздуха и системой управления остаточной плавучестью, прочный корпус выполнен в виде пустотелого цилиндра с верхним и нижним полушарами, вершины которых соединены трубой, в которой установлен движитель, выполненный в виде пустотелой винтовой трубы с волом, установленным с возможностью вращения от реверсивного погружного электродвигателя, легкий корпус повторяет форму прочного корпуса и установлен с зазором, равным h, огибая поверхность прочного корпуса, и имеет на боковой поверхности отверстия в зоне оснований полушаров, система управления остаточной плавучестью включает емкость с отверстиями в днище, размещенную в верхнем полушаре легкого корпуса, и эжектор в виде трубопровода, входной патрубок которого размещен в полости емкости и сообщается через регулируемый ручной дроссель с выходным патрубком, который размещен в трубе за движителем, баллон сжатого воздуха установлен в прочном корпусе и сообщается трубопроводом через регулируемый ручной дроссель с полостью емкости.
Предлагаемый буксировщик водолаза иллюстрируется чертежами, представленными на фиг.1, 2, 3 и 4.
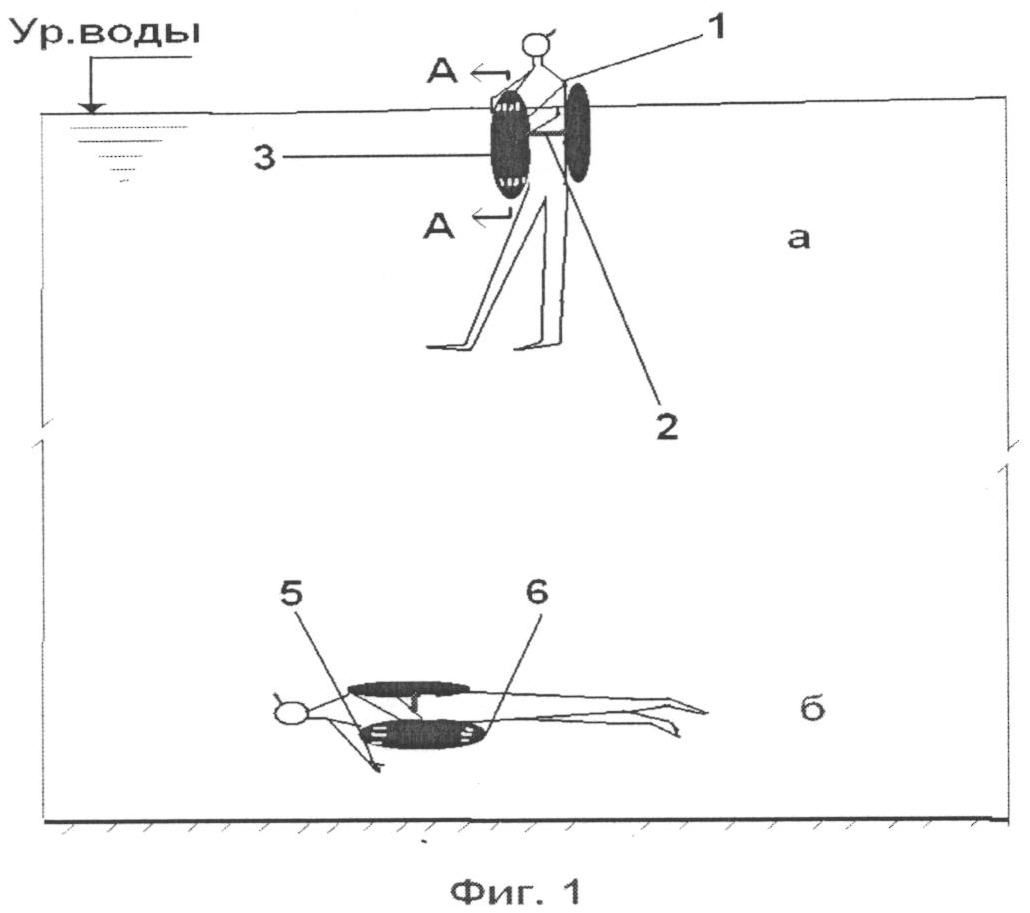
На фиг.1а показан буксировщик с водолазом в вертикальном положении (погружение и подъем).
На фиг.1б показан буксировщик с водолазом в горизонтальном положении (плавание на заданной глубине).
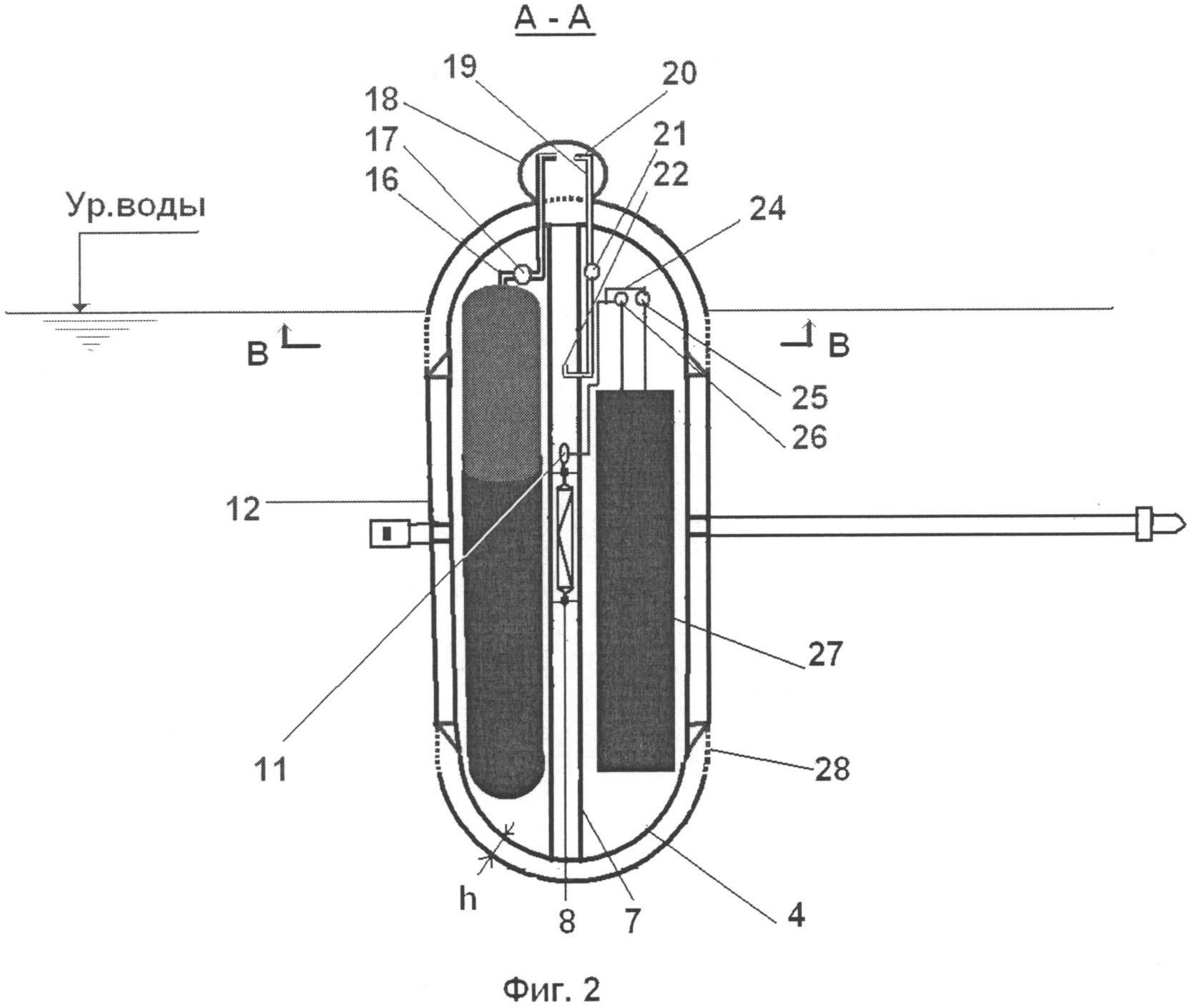
На фиг.2 - продольный разрез А-А буксировщика водолаза.
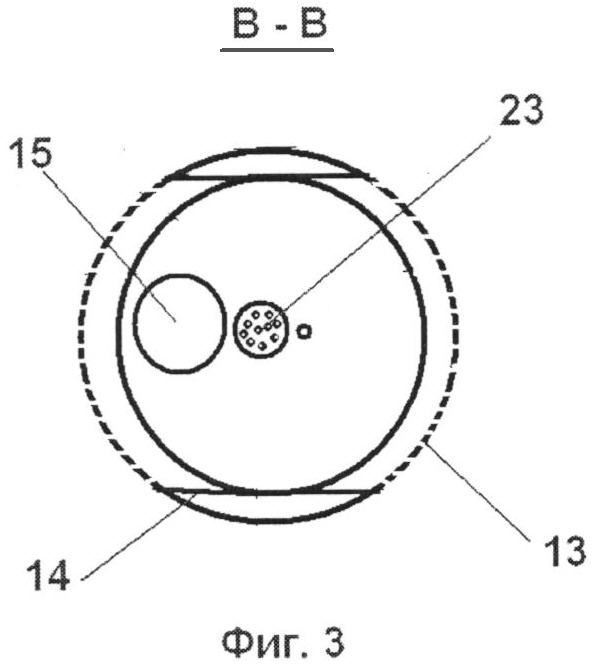
На фиг.3 - поперечный разрез В-В буксировщика водолаза.
На фиг.4 - движитель буксировщика водолаза.
Водолазу 1 на грудь поясным ремнем 2 крепится буксировщик 3: вертикальное положение (фиг.1а - погружение и подъем); горизонтальное положение (фиг.1б - плавание на заданной глубине). Буксировщик 3 имеет прочный корпус 4, выполненный в виде пустотелого цилиндра с верхним 5 и нижним 6 полушарами, вершины которых соединены трубой 7, в которой установлен движитель 8, выполненный в виде пустотелой винтовой трубы 9 с волом 10, установленным с возможностью вращения от реверсивного погружного электродвигателя 11. Пустотелая винтовая труба 9 имеет прямоугольное поперечное сечение a×2a, а стенки лопасти закручены по длине на угол от 0 до 180°. Легкий корпус 12 повторяет форму прочного корпуса 4 и установлен с зазором, равным h, огибая поверхность прочного корпуса 4, и имеет на боковой поверхности отверстия 13 в зоне основания верхнего полушара 5. Перегородка 14 крепится к прочному 4 и легкому корпусу 12. Система управления остаточной плавучестью включает баллон сжатого воздуха 15, который сообщается трубопроводом 16 через регулируемый ручной дроссель 17 с полостью емкости 18; эжектор в виде трубопровода 19, входной патрубок 20 которого размещен в полости емкости 18 и сообщается через регулируемый ручной дроссель 21 с выходным патрубком 22, который размещен в трубе 7 за движителем 8. В днище емкости 19 выполнены отверстия 23. Реверсивный погружной электродвигатель 11 кабелем 24 соединен через кнопку 25 вращения по часовой стрелке и через кнопку 26 вращения против часовой стрелки с аккумуляторными батареями 27. Легкий корпус 12 имеет на боковой поверхности отверстия 28 в зоне основания нижнего полушара 6.
Буксировщик водолаза работает следующим образом.
Буксировщик 3 имеет положительную плавучесть, так как его емкость 18 через отверстия 23 и зазор (величина h) между прочным 4 и легким корпусом 12 в зоне верхнего полушара 5 между перегородками 14 заполнена атмосферным воздухом. Буксировщик 3 вертикально плавает на поверхности воды. Водолаз 1 крепит буксировщик 3 к груди поясным ремнем 2. Атмосферный воздух из зазора (величина h) между прочным 4 и легким корпусом 12 в зоне нижнего полушара 6 выходит в атмосферу через отверстия 28 и по трубе 7 (фиг.1а). При нажатии кнопки 25 с вращением по часовой стрелке (и удержании ее) ток по кабелю 24 от аккумуляторной батареи 27 включает погружной реверсивный электродвигатель 11 и он вращает движитель 8, вал 10 раскручивается и пустотелая винтовая труба 9 захватывает воду и по трубе 7 выбрасывает ее в зазор (величина h) верхнего полушара 5 и далее через отверстия 13 в море (водоем). Вода в трубу 7 поступает через отверстия 28. Вода через отверстия 13 выталкивает воздух из зазора (величина h) в атмосферу. В зазоре (величина h) верхнего полушара 5 возникает неоднородное поле скоростей. Благодаря этому в потоке возникнут инерционные силы, которые будут создавать разрежение на поверхности прочного корпуса 4 и приведут к движению аппарата вниз. Величина этой движущей силы зависит от скорости потока, величины h и площади поверхности верхнего полушара 5. В основе этого обоснования лежит эффект Коанда (energy-source.ru/-iv-/s19-.html, Г. Смирнов «Рожденные вихрем», 1982). Движению буксировщика 3 вниз способствует отрицательная плавучесть буксировщика 3, полученная за счет удаления воздуха из зазора (величина h) верхнего полушара 5. Если нужно ускорить погружение, то открывается регулируемый ручной дроссель 21 и воздух из емкости 18 через входной патрубок 20 по трубопроводу 19 и выходной патрубок 22, расположенный в зоне пониженного давления в трубе 7, подсасывается (эжектор) и выбрасывается с водой через отверстия 13 в атмосферу. Буксировщик 3 приобретает еще меньшую плавучесть и погружается с большей скоростью. Так осуществляется тонкая регулировка плавучести буксировщика 3. При закрытии дросселя 21 скорость погружения стабилизируется. Если нужно повысить плавучесть и соответственно снизить скорость погружения буксировщика 3, то открывается регулируемый ручной дроссель 17 и воздух из баллона сжатого воздуха 15 по трубопроводу 16 поступает в емкость 18. При закрытии дросселя 17 плавучесть стабилизируется. При достижении заданной глубины водолаз 1 занимает горизонтальное положение (фиг.1б) нажимает (и удерживает) кнопку 26 вращения против часовой стрелки и погружной реверсивный электродвигатель 11 вращает движитель 8, вал 10 раскручивается и пустотелая винтовая труба 9 захватывает воду и по трубе 7 выбрасывает ее в зазор (величина h) нижнего полушара 6 и далее через отверстия 28 в море (водоем). Вода в трубу 7 поступает через отверстия 13. Имеет место эффект Коанда и буксировщик 3 движется в горизонтальном направлении. Если водолаз займет вертикальное положение, то он будет всплывать. В случае отказа движителя 8 (села или замкнула аккумуляторная батарея 27) подъем можно осуществлять используя баллон сжатого воздуха 15 путем открытия дросселя 17 и выпуска сжатого воздуха в емкость 18. Плавучесть буксировщика 3 увеличивается и он всплывает.
Использование буксировщика водолаза позволит повысить маневренность водолаза за счет использования системы управления остаточной плавучестью и освободить руки водолаза для управления аппаратом.
Роторный рыбонасос
Рыбозащитное устройство с рыбоотводом
Способ формирования транспортирующего потока в магистральном трубопроводе
Подводный аппарат повышенной маневренности
Гидроэлектростанция на дне моря
Поплавковая волновая электростанция плавучего завода сжижения природного газа (спг)
Поплавковая волновая электростанция
Поплавковая волновая электростанция
Способ транспортировки газообразных и жидких продуктов по трубопроводу
Внутрисосудистый расширительный имплантат
Роторный рыбонасос
Рыбозащитное устройство с рыбоотводом
Способ формирования транспортирующего потока в магистральном трубопроводе
Подводный аппарат повышенной маневренности
Гидроэлектростанция на дне моря
Поплавковая волновая электростанция плавучего завода сжижения природного газа (спг)
Поплавковая волновая электростанция
Поплавковая волновая электростанция
Способ транспортировки газообразных и жидких продуктов по трубопроводу
Внутрисосудистый расширительный имплантат

