Результат интеллектуальной деятельности: СИСТЕМА ДЛЯ ОБЕСПЕЧЕНИЯ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ И РЕМОНТА ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ В ЛЕДОВЫХ УСЛОВИЯХ
Вид РИД
Изобретение
Изобретение относится к области судостроения, а более конкретно - к техническим средствам для обеспечения технического обслуживания и ремонтов подводных добычных комплексов и доставки технологического оборудования с борта надводного обеспечивающего судна на дно акватории, и может быть использовано при создании подводных аппаратов для выполнения работ на подводных добычных комплексах в арктических ледовых условиях.
Известна двухзвенная система необитаемого аппарата-носителя и подводного робота (Д.В. Войтов. Телеуправляемые необитаемые подводные аппараты + СД. М., Моркнига, 2012, стр.56), состоящая из установленных на обеспечивающем судне устройства глубоководного погружения и телеуправляемого необитаемого подводного аппарата (подводного робота), который после спуска в подводном положении выходит из «гаража», установленного на устройстве глубоководного погружения (аппарате-носителе) для выполнения осмотровых или технологических операций. Предложенная система является эффективной при осмотрах, ремонтах и техническом обслуживании подводного оборудования, поскольку расширяет функциональные возможности каждого аппарата (аппарата-носителя и подводного робота).
Однако данной системе присущи следующие недостатки. Устройство глубоководного погружения, будучи спускаемым с обеспечивающего судна, не обладает маневренными качествами, необходимыми для горизонтального перемещения по акватории. При этом транспортируемый с помощью устройства глубоководного погружения (аппарата-носителя) телеуправляемый подводный аппарат должен совмещать в себе все функции, включая маневрирование и выполнение технологических операций на подводных добычных комплексах. Такое совмещение функций перегружает телеуправляемый подводный аппарат за счет размещения дополнительных технических средств, снижая его полезную нагрузку.
Другим недостатком упомянутой системы является принципиальная невозможность с ее помощью доставки грузов (заменяемого при ремонтах технологического оборудования) с надводного обеспечивающего судна на донную плиту подводного добычного комплекса, поскольку, как было отмечено выше, устройство глубоководного погружения не обладает маневренными качествами, а размещаемый на нем подводный робот не является грузовым аппаратом. Простой спуск технологического оборудования на донную плиту подводного добычного комплекса возможен в этом случае (при отсутствии горизонтального маневрирования) только при точном позиционировании обеспечивающего судна над подводным добычным комплексом. Однако такое позиционирование невозможно или весьма затруднительно в ледовых условиях и связано с большими материальными и временными затратами.
Описанные недостатки частично устранены на известной челночной системе BOXFISH, предназначенной для выполнения работ на подводных добычных комплексах (Д.В. Войтов. Телеуправляемые необитаемые подводные аппараты + СД. М., Моркнига, 2012, стр.50). В данной системе подводный телеуправляемый аппарат-челнок (аппарат-носитель), имеющий собственный движительный комплекс, является носителем телеуправляемого аппарата-робота, транспортирует и выпускает его на подводном терминале (подводном добычном комплексе) - прототип. Известная система обеспечивает маневрирование челночного аппарата в акватории. Недостатком системы является отсутствие универсальности, поскольку предназначена только для доставки подводного робота и не предназначена для доставки и разгрузки сменного технологического оборудования на подводный добычной комплекс, а также обратной доставки на обеспечивающее судно с подводного добычного комплекса заменяемого оборудования при выполнении ремонтов.
Задачей предлагаемого изобретения является устранение указанных недостатков, а именно повышение эффективности системы путем расширения ее эксплуатационных возможностей при работе в ледовых условиях.
Это достигается тем, что в систему для обеспечения технического обслуживания и ремонта подводных добычных комплексов в ледовых условиях, содержащую спускаемый с обеспечивающего судна подводный аппарат-носитель с установленным на нем подводным роботом, связанный с надводным обеспечивающим судном силовым кабелем, кабелем управления и страховочным тросом, по изобретению введены в форме кольцевых секторов в плане цистерны главного балласта с клапанами вентиляции в верхней их части и кингстонными решетками в нижней части и цистерны уравнительного балласта. Причем указанные цистерны последовательно соединены друг с другом с помощью жестких разъемных креплений по периметру их смежных поверхностей, образуя тем самым кольцевой корпус подводного аппарата-носителя, и расположены они по окружности попеременно, преимущественно с равными интервалами и равноудаленными от центра упомянутого кольцевого корпуса. При этом аппарат-носитель оснащен баллонами сжатого воздуха, манипуляторами, блоком управления им, а также движительно-рулевым комплексом, состоящим из поворотных движительных устройств с приводами, системами сжатого воздуха и уравнительного балласта. Причем в корпусе обеспечивающего судна выполнена шахта для спуска и подъема подводного аппарата-носителя вместе с подводным роботом или с оборудованием подводного добычного комплекса.
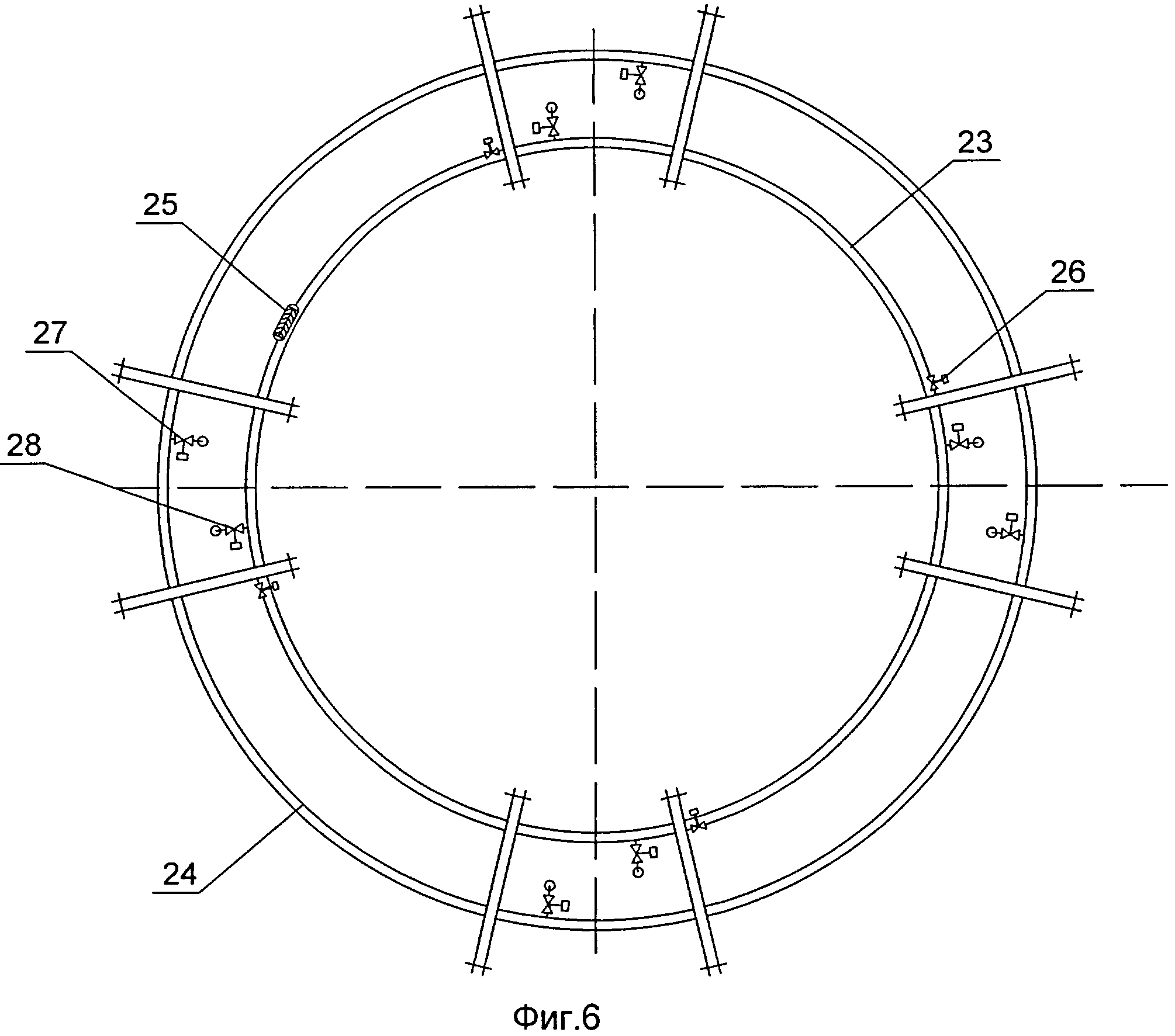
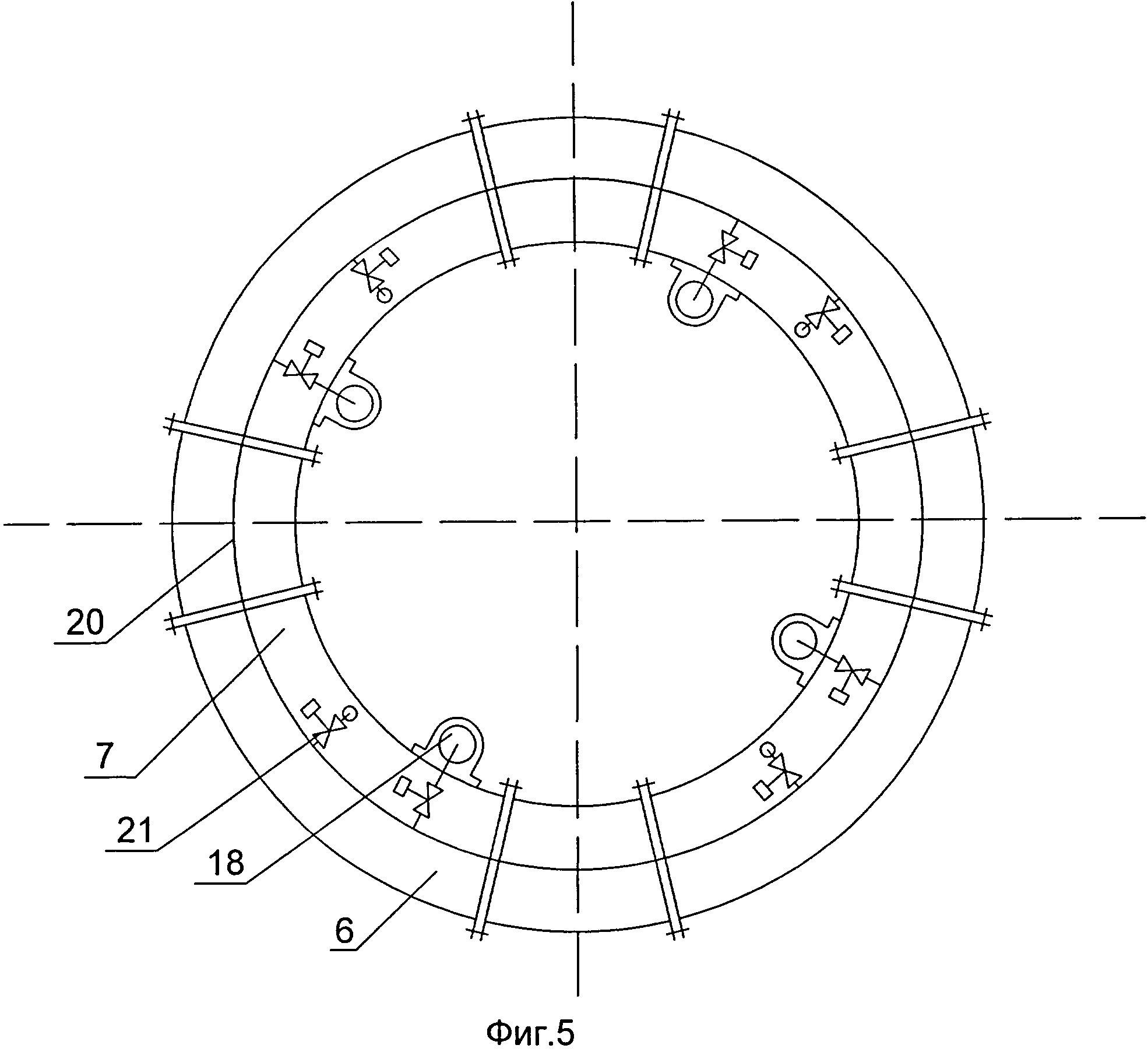
Кроме того, система сжатого воздуха выполнена в виде концентрично расположенного относительно кольцевого корпуса подводного аппарата-носителя коллектора сжатого воздуха, подключенного к баллонам сжатого воздуха и к цистернам главного балласта через запорную арматуру. Система уравнительного балласта подводного аппарата-носителя выполнена в виде замкнутого кольцевого водяного трубопровода, в который встроен насос и запорная арматура, и замкнутого воздушного трубопровода со встроенной запорной арматурой, причем упомянутые трубопроводы подключены к цистернам уравнительного балласта через регулирующую арматуру.
При этом манипуляторы с силовыми приводами выполнены в виде многозвенного механизма с шарнирными соединениями на границах звеньев, включая их крепление к корпусу подводного аппарата-носителя, и захватным устройством на противоположном конце, причем звенья выполнены телескопическими с силовыми приводами для изменения длины и ориентации в пространстве.
Наряду с этим движительные устройства распределены по окружности кольцевого корпуса подводного аппарата-носителя и соединены с ним посредством поворотных кронштейнов, шарнирно закрепленных к кольцевому корпусу и выполненных с возможностью их поворота из нижнего положения в верхнее с помощью привода, а на поворотных кронштейнах движительные устройства установлены на их свободных концах с возможностью поворота вокруг продольной оси кронштейнов с помощью привода поворота.
Кроме того, подводный робот в подводном транспортном положении установлен в кольцевом пространстве подводного аппарата-носителя и неподвижно соединен с последним с помощью его манипуляторов.
Введение в состав подводного аппарата-носителя в форме кольцевых секторов цистерн главного балласта с клапанами вентиляции в верхней их части и кингстонными решетками в их нижней части и цистерн уравнительного балласта, последовательно соединенных друг с другом с помощью жестких разъемных креплений по периметру их смежных поверхностей и расположенных попеременно, преимущественно с равными интервалами по окружности и равноудаленными от центра его кольцевого корпуса с образованием тем самым кольцевого корпуса подводного аппарата-носителя, обеспечивает формирование конструкции подводного аппарата-носителя, в которой цистерны, образующие кольцевой корпус, при повреждениях могут заменяться, а транспортируемый подводный робот или оборудование подводного добычного комплекса защищены кольцевым корпусом подводного аппарата-носителя от случайных механических воздействий, что расширяет эксплуатационные возможности подводного аппарата-носителя и системы в целом.
Оснащение подводного аппарата-носителя баллонами сжатого воздуха, манипуляторами, блоком управления им, а также движительно-рулевым комплексом, состоящим из поворотных движительных устройств с приводами, системами сжатого воздуха и уравнительного балласта позволяет обеспечить маневренные качества подводного аппарата-носителя в подводном положении по горизонтали и вертикали.
Выполнение шахты на обеспечивающем судне для спуска и подъема подводного аппарата-носителя вместе с подводным роботом или оборудованием подводного добычного комплекса формирует систему, в которой аппарат-носитель защищен от ледовых и ветроволновых воздействий внутри шахты на обеспечивающем судне в период его загрузки оборудованием или подводным роботом и подготовки к погружению.
Выполнение системы сжатого воздуха в виде концентрично расположенного относительно кольцевого корпуса подводного аппарата-носителя коллектора сжатого воздуха, подключенного к баллонам сжатого воздуха и к цистернам главного балласта через запорную арматуру, а системы уравнительного балласта подводного аппарата-носителя в виде замкнутого кольцевого водяного трубопровода, в который встроен насос и запорная арматура, и замкнутого воздушного трубопровода со встроенной запорной арматурой, подключенных к цистернам уравнительного балласта через регулирующую арматуру, обеспечивает статическое равновесие подводного аппарата-носителя при любом состоянии полезной нагрузки (с подводным роботом или технологическим оборудованием), что расширяет эксплуатационные возможности подводного аппарата-носителя и системы в целом.
Выполнение манипуляторов с силовыми приводами в виде многозвенного механизма с шарнирными соединениями на границах звеньев, включая их крепление к корпусу подводного аппарата-носителя, и захватным устройством на противоположном конце, выполненных телескопическими с силовыми приводами для изменения длины и ориентации в пространстве, обеспечивает удержание в подводном транспортном положении манипуляторами подводного аппарата-носителя подводного робота или неограниченной номенклатуры потенциально необходимого на подводных добычных комплексах оборудования, что расширяет эксплуатационные возможности указанного аппарата.
Соединение движительных устройств с кольцевым корпусом подводного аппарата-носителя посредством поворотных кронштейнов, шарнирно закрепленных к кольцевому корпусу и выполненных с возможностью их поворота из нижнего положения в верхнее с помощью привода, установленных на свободных концах кронштейнов с возможностью поворота вокруг продольной оси кронштейнов с помощью привода поворота, обеспечивает заданную ориентацию движительных устройств в пространстве и, соответственно, заданное направление тяги каждого движительного устройства в составе движительного комплекса, что расширяет эксплуатационные возможности подводного аппарата-носителя и системы в целом.
Установка подводного робота или оборудования подводного добычного комплекса в подводном транспортном положении в кольцевом пространстве подводного аппарата-носителя и неподвижное соединение его с подводным аппаратом-носителем манипуляторами последнего обеспечивает защиту перемещаемого на подводном аппарате-носителе объекта от механических повреждений, при этом выгрузка перемещаемого объекта на донной плите подводного добычного комплекса ограничивается простым отсоединением манипуляторов подводного аппарата-носителя без дополнительных подъемно-транспортных операций, что улучшает эксплуатационные возможности подводного аппарата-носителя и системы в целом.
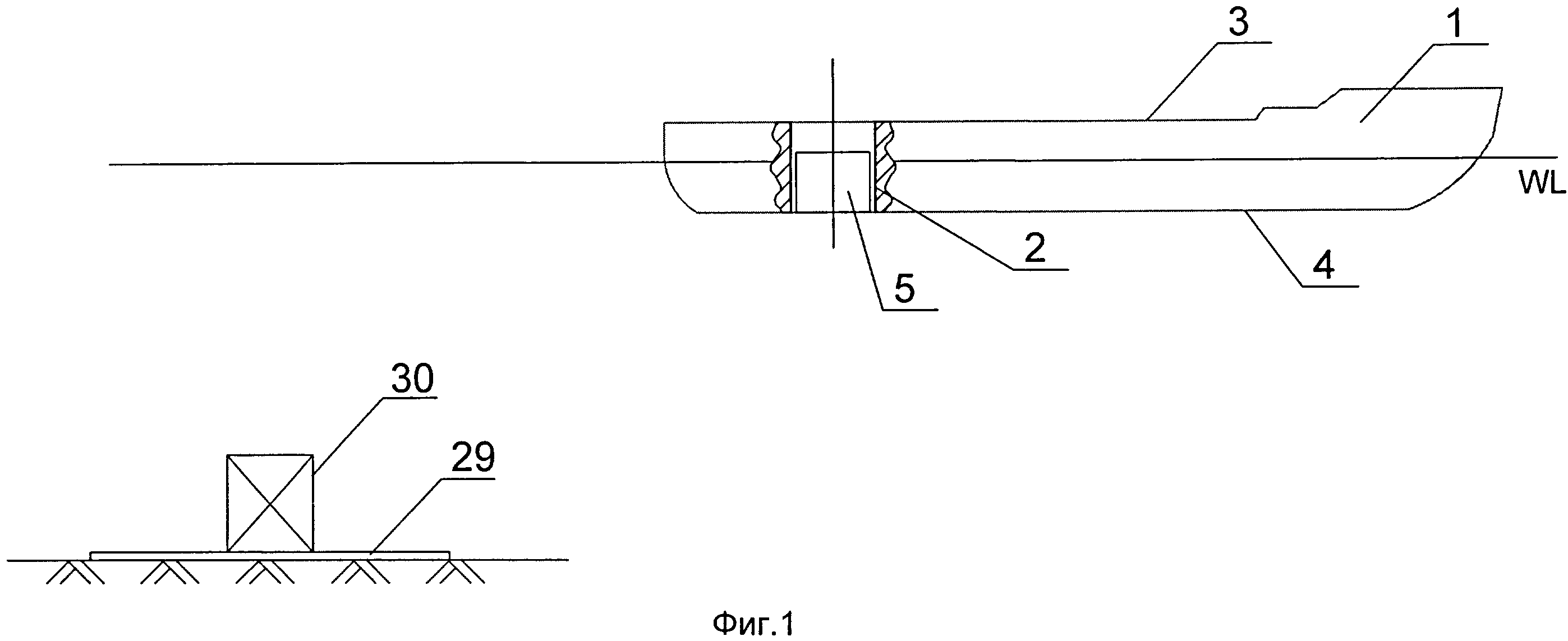
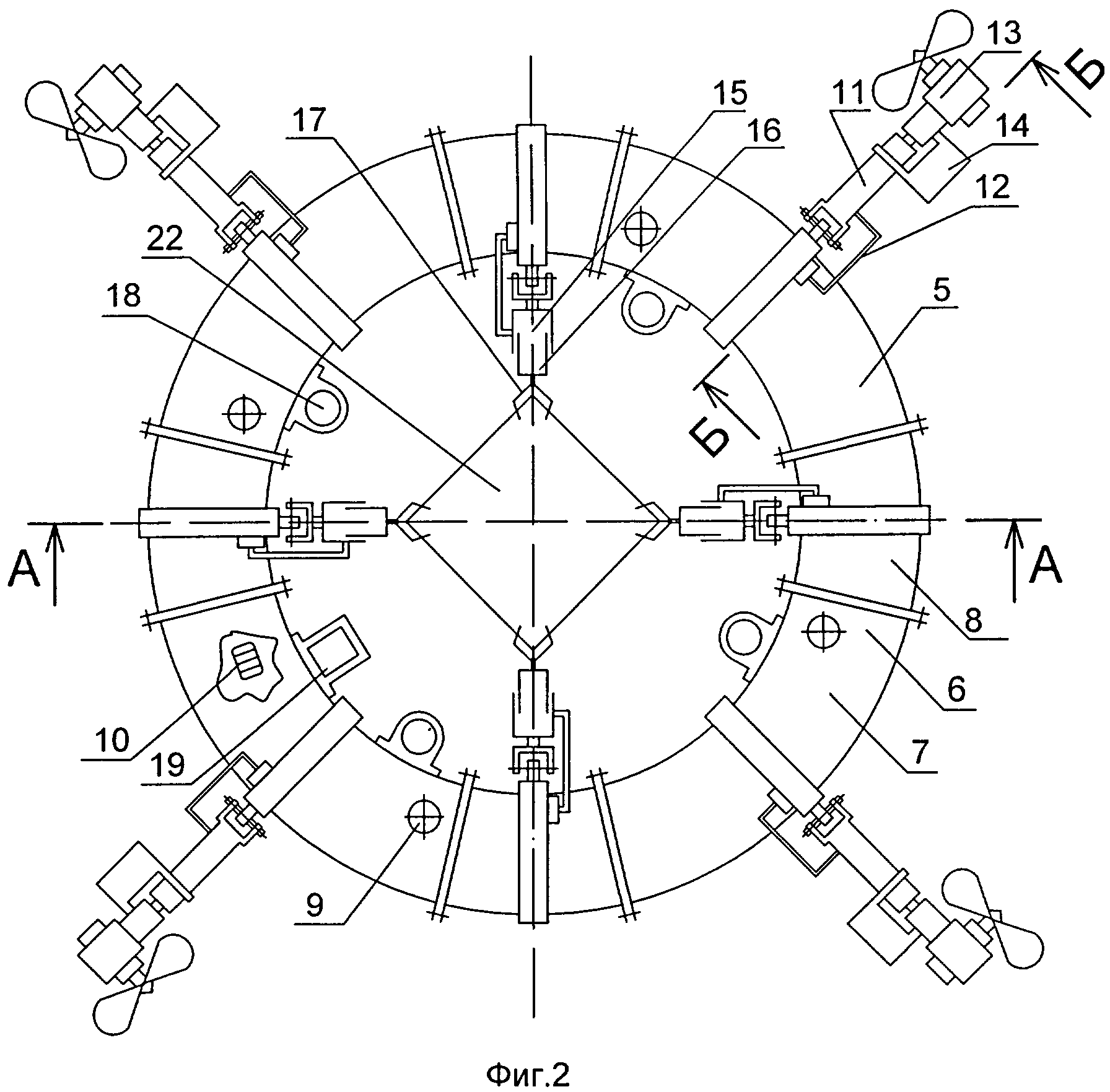
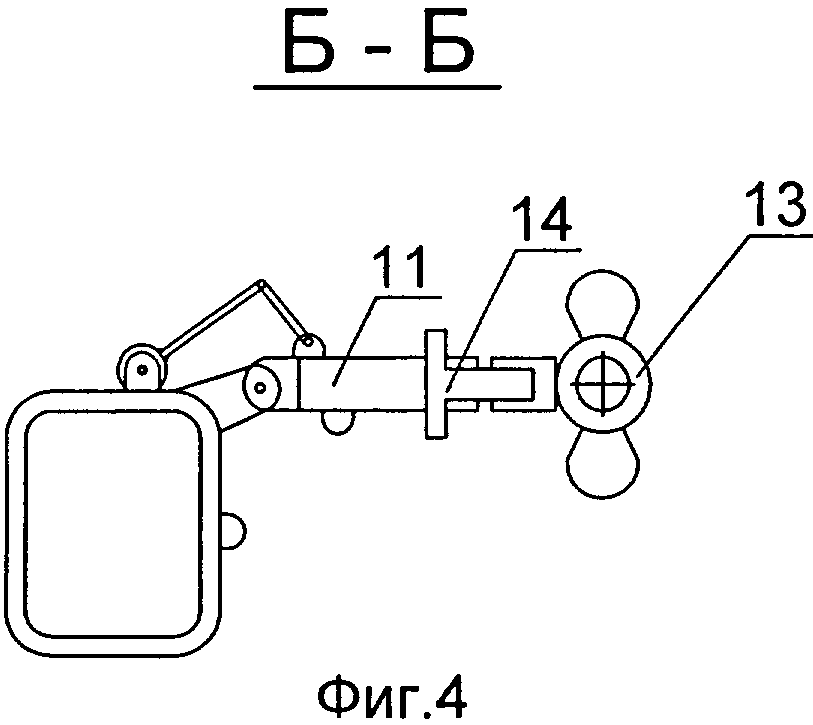
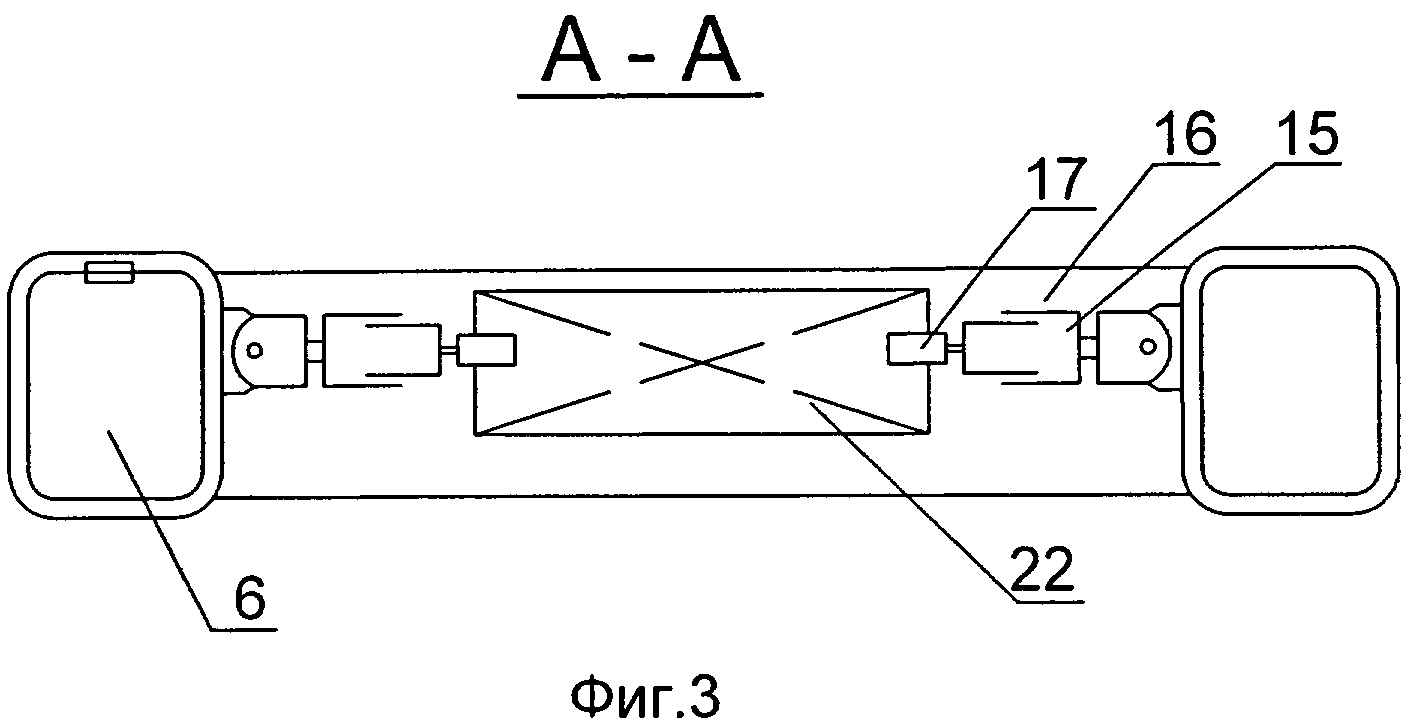
Сущность предлагаемого изобретения поясняется рисунками, где на фиг.1 показана система для обеспечения технического обслуживания и ремонта подводных добычных комплексов в целом, на фиг.2 - подводный аппарат-носитель в плане с транспортируемым объектом, на фиг.3 - сечение А-А на фиг.2, на фиг.4 - сечение Б-Б на фиг.2 и на фиг.5 и 6 показаны системы подводного аппарата-носителя.
Система для обеспечения технического обслуживания и ремонта подводных добычных комплексов в ледовых условиях (фиг.1) содержит обеспечивающее судно 1 со сквозной шахтой 2, встроенной между верхней палубой 3 и днищем 4 судна. В сквозную шахту 2 помещен подводный аппарат-носитель 5. Подводный аппарат-носитель 5 (фиг.2) содержит кольцевой корпус 6, образованный цистернами главного балласта 7 и цистернами уравнительного балласта 8. В верхней части цистерн главного балласта 7 установлены клапаны вентиляции 9, а в нижней их части - кингстонные решетки 10. На кольцевом корпусе 6 шарнирно закреплены кронштейны 11 с приводами 12 (фиг.2 и 4), на свободных концах которых шарнирно установлены с возможностью поворота вокруг продольных осей кронштейнов 11 движительные устройства 13 с приводами поворота 14. На кольцевом корпусе 6 шарнирно закреплены также манипуляторы 15 (фиг.2 и 3) в виде многозвенного механизма с телескопическими звеньями 16 и захватными устройствами 17. Баллоны сжатого воздуха 18 и блок управления 19 (фиг.1) жестко соединены с кольцевым корпусом 6 подводного аппарата-носителя 5. На кольцевом корпусе 6 подводного аппарата-носителя 5 установлена система сжатого воздуха (фиг.5) в виде коллектора 20, подключенного к цистернам главного балласта 7 через запорную арматуру 21 и к баллонам сжатого воздуха 18. В кольцевом пространстве кольцевого корпуса 6 (фиг.2, 3) установлен транспортируемый объект 22 (подводный робот или оборудование подводного добычного комплекса) и соединен с кольцевым корпусом 6 посредством захватных устройств 17 на манипуляторах 15. На кольцевом корпусе 6 подводного аппарата-носителя 5 установлена также система уравнительного балласта (фиг.6) в виде кольцевого водяного коллектора 23 и воздушного кольцевого коллектора 24. В кольцевой водяной коллектор 23 встроен насос 25. Кольцевой водяной коллектор 23 оборудован запорной арматурой 26. Упомянутые коллекторы 23 и 24 подключены к цистернам уравнительного балласта 8 через регулирующую арматуру 27 и 28.
Система работает следующим образом. В исходном состоянии надводное обеспечивающее судно 1 (фиг.1) находится вблизи установленного на донной плите 29 подводного добычного комплекса 30. Подводный аппарат-носитель 5 с помощью судовых грузоподъемных механизмов (на рисунках не показаны) опускается в сквозную шахту 2 обеспечивающего судна 1 и устанавливается наплаву при продутых (заполненных воздухом) цистернах главного балласта 7 (фиг.2) Подводный робот (транспортируемый объект) 22 судовыми грузоподъемными механизмами (на рисунках не показаны) опускается в сквозную шахту 2 и устанавливается в кольцевое пространство подводного аппарата-носителя 5 путем захвата подводного робота 22 манипуляторами 15 подводного аппарата-носителя 5. Далее производится выравнивание посадки подводного аппарата-носителя 5 с установленным на нем подводным роботом 22 путем изменения положения подводного робота 22 внутри кольцевого пространства подводного аппарата-носителя 5 с применением манипуляторов 15, управляемых блоком управления 19. Данная операция производится автоматически, сопровождается непрерывным удерживанием подводного робота 22 захватными устройствами 17 манипуляторов 15 и завершается устранением наклонений подводного аппарата-носителя 5. Таким образом, в статическом надводном положении перед погружением подводный аппарат-носитель 5 вместе с закрепленным подводным роботом 22 полностью уравновешен. Подводный аппарат-носитель 5 соединяется с обеспечивающим судном 1 посредством страховочного троса, силового кабеля и кабеля управления (на рисунках не показаны). Путем частичного заполнения забортной водой цистерн главного балласта 7 подводный аппарат-носитель 5 приобретает небольшую отрицательную плавучесть и выходит из сквозной шахты 2 через проем в днище 4 обеспечивающего судна 1 и погружается на глубину, исключающую случайный механический контакт с обеспечивающим судном 1. При этом автоматически восстанавливается и поддерживается нулевая плавучесть регулированием количества воды в цистернах главного балласта 7 за счет подачи воздуха из баллонов сжатого воздуха 18 через коллектор сжатого воздуха 20 или стравливания воздуха из цистерн главного балласта 7 через клапаны вентиляции 9. Далее все движительные устройства 13 автоматически устанавливаются в положения, обеспечивающие необходимое направление тяги для выдерживания заданной траектории, определяемой взаимным положением подводного аппарата-носителя 5 и донной плиты 29 подводного добычного комплекса 30. Ориентация движительных устройств 13 постоянно отслеживается и корректируется автоматически посредством блока управления 19 через приводы 12 и 14. Изменение ориентации движительных устройств 13 в пространстве в статическом положении сопровождается нарушением статического равновесия подводного аппарата-носителя 5. При движении подводного аппарата-носителя 5 также возможно нарушение его равновесия, обусловленное равнодействующей приложенных к нему сил. Указанные нарушения равновесия компенсируются работой системы уравнительного балласта в виде водяного 23 и воздушного 24 коллекторов в совокупности с цистернами уравнительного балласта 8. В исходном положении каждая цистерна уравнительного балласта 8 подводного аппарата-носителя 5 наполовину заполнена воздухом и наполовину - водой. При необходимости восстановить равновесие подводного аппарата-носителя 5 вода через водяной коллектор 23 насосом 25 перераспределяется между цистернами уравнительного балласта 8, а по воздушному коллектору 24 происходит обратное движение воздуха в системе уравнительного балласта с замещением воды, перекачиваемой насосом 25. Запорная 26 и регулирующая 27, 28 арматура обеспечивают направленное перемещение воды и воздуха в нужную комбинацию цистерн уравнительного балласта 8 с соответствующим дозированием с помощью регулирующей арматуры 27 и 28. После достижения подводным аппаратом-носителем 5 донной плиты 29 подводного добычного комплекса 30 подводный аппарат-носитель 5 зависает над донной плитой 29 с небольшой положительной плавучестью, исключающей удар его об указанную донную плиту 29. Дальнейшее опускание подводного аппарата-носителя 5 с транспортируемым объектом 22 на донную плиту 29 обеспечивается работой движительных устройств 13. После достижения устойчивого контакта подводного аппарата-носителя 5 с донной плитой 29 система автоматического управления придает подводному аппарату-носителю 5 выраженную отрицательную плавучесть посредством подачи забортной воды через кингстонные решетки 10 в цистерны главного балласта 7 при открытых клапанах вентиляции 9 указанных цистерн, величина которой соизмерима с весом транспортируемого объекта 22 (в данном случае - подводного робота) для того, чтобы избежать неконтролируемого всплытия подводного аппарата-носителя 5 с возможным повреждением технических средств при отсоединении транспортируемого объекта 22 от подводного аппарата-носителя 5. Далее транспортируемый объект 22 дистанционно оператором с обеспечивающего судна 1 через блок управления 19 опускается манипуляторами 15 до уровня донной плиты 29 и освобождается от захватов 17 на манипуляторах 15. При этом транспортируемый объект 22 оказывается установленным на донной плите 29 в кольцевом пространстве подводного аппарата-носителя 5. Дальнейшее разделение транспортируемого объекта 22 с подводным аппаратом-носителем 5 обеспечивается управляемым всплытием последнего. Управляемое всплытие подводного аппарата-носителя 5 производится посредством движительных устройств 13 в автоматическом режиме, управляемых блоком управления 19. Всплытие подводного аппарата-носителя 5 заканчивается входом его в сквозную шахту 2 на обеспечивающем судне 1. При этом подводный аппарат-носитель остается наплаву внутри сквозной шахты 2 и подготовлен к принятию следующей единицы транспортируемого оборудования для ремонта подводного добычного комплекса 30. Все операции по демонтажу и монтажу оборудования подводного добычного комплекса 30, а также перемещение технологического оборудования в пределах донной плиты 29 обеспечиваются подводным роботом 22, который имеет выраженную отрицательную плавучесть. Ремонт подводного добычного комплекса 30 завершается после доставки на обеспечивающее судно 1 сначала сменяемого технологического оборудования, а затем подводного робота 22 посредством подводного аппарата-носителя 5. Указанная обратная доставка осуществляется в обратном порядке по отношению к описанной выше.
Предлагаемая система для обеспечения технического обслуживания и ремонта подводных добычных комплексов в ледовых условиях обладает повышенной эффективностью в сравнении с прототипом в связи с расширением эксплуатационных возможностей при работе в ледовых условиях, что выгодно отличает ее от прототипа.
Способ дальнего определения нефтяного загрязнения морской поверхности с помощью свч-радиолокатора
Способ получения 1-β-d-рибофуранозил-1,2,4-триазол-3-карбоксамида
Микробиологический способ получения 21-ацетоксипрегна-1,4,9( 11 ),16-тетраен-3,20-диона из 21-ацетоксипрегна-4,9( 11 ),16-триен-3,20-диона
Способ антикоррозионной защиты металлических конструкций и крупногабаритного промышленного оборудования
Способ измерения параметров физических полей верхней полусферы морского объекта
Способ получения широкопористого гамма-оксида алюминия
Устройство избирательного контроля замыкания фазы на корпус в многофазных сетях с изолированной нейтралью
Cпособ получения фильтрующе-сорбирующего материала с фотокаталитическими свойствами
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Смазочная шайба для прессования крупногабаритных стальных труб и профилей
Контейнер пресса для изготовления крупногабаритных труб и профилей
Способ изготовления отрезного алмазного круга
Способ дальнего определения нефтяного загрязнения морской поверхности с помощью свч-радиолокатора
Способ получения 1-β-d-рибофуранозил-1,2,4-триазол-3-карбоксамида
Микробиологический способ получения 21-ацетоксипрегна-1,4,9( 11 ),16-тетраен-3,20-диона из 21-ацетоксипрегна-4,9( 11 ),16-триен-3,20-диона
Способ антикоррозионной защиты металлических конструкций и крупногабаритного промышленного оборудования
Способ измерения параметров физических полей верхней полусферы морского объекта
Способ включения трансформатора
Способ получения широкопористого гамма-оксида алюминия

