Результат интеллектуальной деятельности: СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к области авиационного приборостроения и позволяет осуществить поиск в автоматическом режиме взлетно-посадочной полосы и обеспечить автоматическое управление посадкой летательного аппарата независимо от метеоусловий и времени суток.
В известном аналоге на изобретение (Ю.Г. Кассин и др. Автоматическое управление самолетом при заходе на посадку. Рига, Институт инженеров ГА, 1979) [1] описан способ посадки самолета, в котором радиотехническими средствами формируют в пространстве курсовую и глиссадную условные линии, проекции которых совпадают с продольной осью взлетно-посадочной полосы (ВПП), измеряют угловые отклонения самолета от курсовой и глиссадной линии, минимизируют эти отклонения путем управления боковым и продольным движениями самолета в процессе снижения по глиссаде, после чего посадку осуществляют визуально, наблюдая огни светотехнического оборудования аэродрома. По цвету и расположению огней светотехнического оборудования определяют направление на ось ВПП, удаление от ВПП, плоскость горизонта, границы ВПП, место приземления, направление пробега после посадки.
Основными причинами, препятствующими надежному достижению требуемого технического результата при использовании предлагаемого способа посадки, является отсутствие автоматического управления самолетом на этапе выравнивания самолета относительно плоскости взлетно-посадочной полосы при подлете к ней, а также в области пролета самолета над полосой до точки посадки на полосу, что снижает надежность и безопасность завершения посадки самолета за счет человеческого фактора, обусловленного повышенной психофизиологической усталостью пилота после длительного полета.
Известны аналоги изобретений ВПП (патент США №4101893, кл. 343-108, 1978[2]; патент Германии №3629911, кл. B64F 1/18, 1993 [3]), основанные на радиотехнических способах ориентирования при заходе на посадку, в которых принимаются сигналы от установленных по периметру ВПП активных или пассивных маркеров, преобразуют их в видеосигналы, отображают в дисплее и по угловому положению отметок, отображающих контуры ВПП относительно вертикальной оси экрана дисплея, судят о направлении движения самолета относительно оси ВПП.
Причины, препятствующие достижению требуемого технического результата при использовании этих способов, заключаются в том, что они, обеспечивая формирование видеообраза ВПП, не рассчитывают координат положения самолета относительно ВПП и не обеспечивают информационной связи с системой управления самолетом, что не позволяет реализовать полу и автоматические режимы посадки. Применяемые маркеры не позволяют определять положение самолета на всех этапах посадки с точностью, необходимой для реализации автоматической посадки, особенно в процессе выравнивания.
Известны аналоги на изобретения (патенты РФ №1804629, кл. G08G 5/02, 1993 [4]; №1836642, кл. G01S 13/00, 1993 [5]), в которых способы получения посадочной информации для летательного аппарата основаны на обработке радиолокационного изображения ВПП, по которому определяют необходимые данные и отображают их на экране бортового индикатора или лобовом стекле в удобном для восприятия пилотом виде.
В аналоге на изобретение (патент РФ №2369532 C2, МПК: B64F 1/18 [6]) приведена система посадки летательных аппаратов, которая содержит три лазерных излучателя, установленных вблизи взлетно-посадочной полосы со стороны захода воздушного судна на посадку, два из которых - глиссадные - расположены по краям полосы и предназначены для формирования лучей, определяющих плоскость глиссады, а третий - курсовой - расположен на продолжении осевой лини полосы и предназначен для формирования луча, определяющего курс посадки. В качестве лазерных излучателей используют полупроводниковые лазерные излучатели, выполненные с возможностью изменения направления формируемых лучей в вертикальной и горизонтальной плоскостях. Глиссадные излучатели установлены на определенном расстоянии от начала полосы. Курсовой излучатель установлен с возможностью формирования луча под определенным углом относительно горизонтальной плоскости. Указанные расстояние и угол определяются из соотношений, в одном из которых фигурирует заданная величина допустимой ошибки положения воздушного судна по вертикали в точке дальнего привода при посадке, а в другом - заданный угол наклона плоскости глиссады и угол свободного прохождения луча над неровностями местности.
Существенным недостатком данной системы является большая вероятность ослепления пилота лазерными излучателями при маневрировании на глиссаде, что снижает надежность и безопасность посадки самолета при любых метеоусловиях (документальный фильм «Лазерная система посадки» "Координата". Момент ослепления летчика: 8:01). Режим доступа: http://www.avsim.su/f/dokumentalnie-filmi-i-syuzheti-96/lazernaya-sistema-posadki-koordinata38362.html?action=viewonline [7].
В первом прототипе к изобретению (Заявка РФ №2011133386/11, кл. B64F 1/18(2006.01) 04/12/2012 г. [9]) описан способ лазерной системы автоматической посадки летательного аппарата, который является наиболее близким техническим решением к предлагаемому.
К первому недостатку данной системы относится то, что посадка летательного аппарата может быть обеспечена лишь наличием на аэродроме датчиков лазерного излучения, а на летательном аппарате - системы высокоточной автономной коррекции текущих координат местоположения летательного аппарата относительно взлетно-посадочной полосы (платформы) [12].
Второй недостаток данной системы следует из анализа методов посадки ЛА с применением систем ГЛОНАС и GPS, приводимого в отчете ГОС НИИ «Аэронавигация» с участием авиакомпании АО Дойче Люфтганза АГ (Германия) и авиакомпании «Самара» [11]. Из отчета следует, что для обеспечения не категорированного (неточного) захода требуемая точность определения координат составляет 50 метров. При этом специальные требования к точности определения высоты не предъявляются. Неточному заходу соответствует коридор 556 метров. При этом ЛА должен находится в этом коридоре с вероятностью 95%. Среднеквадратичная ошибка в режиме использования открытого кода с селективным доступом составляет 30…50 метров. Обеспечение необходимой достоверности с помощью использования контроля целостности с обнаружением и исключением отказа и сохранением способности к навигационным определениям может надежно осуществляться в следующих случаях:
- в момент захода на посадку должно быть не менее 6 навигационных космических аппаратов с функциями автономного контроля целостности в приемнике;
- контроль целостности в режиме захода на посадку должен быть обеспечен начиная с расстояния 3,7 километра от контрольной точки конечного этапа захода на посадку и до точки ухода на второй круг.
Таким образом, системы ГЛОНАС и GPS не могут обеспечить оперативно и с повышенной точностью выход на глиссаду, а поэтому автоматическая посадка ЛА невозможна с использованием лазерной системы автоматического управления ЛА [9].
Во втором прототипе к изобретению (Научно-популярный фильм «Автоматическая посадка и оптический поток» (Режим доступа: http://rutracker.org/forum/viewtopic.php?t=3520535/1 [10]) показан способ посадки вертолета, который основан на датчике оптического потока, жестко закрепленном к корпусу вертолета.
Датчик оптического потока имеет форму параболоида вращения с зеркальной поверхностью, имеющего отверстие в его вершине, где установлено зеркало, которое отражает поток света, направляя его на экран видеокамеры, установленной внутри параболоида. На экране видеокамеры формируется изображение, по своему внешнему периметру похожее на святящееся кольцо отраженного света от зеркальной поверхности параболоида вращения. Геометрия святящегося кольца изменяется в зависимости от положения вертолета над поверхностью Земли. При этом, если плоскость кольца параллельна плоскости Земли, то толщина стенки кольца по периметру становится минимальной, что указывает на параллельное расположение вертолета над поверхностью Земли. В этом случае система управления принимает решение о посадке вертолета. Однако размеры стенки кольца всегда размыты. Поэтому на обработку геометрии кольца уходит много времени и система управления вертолетом принимает решение о посадке со значительной задержкой. При этом траектория полета вертолета всегда стохастична.
Таким образом, основным недостатком данной системы управления является несовершенство датчика оптического потока.
Цель изобретения - повышение надежности посадки летательного аппарата на взлетно-посадочную полосу.
Указанный технический результат достигают с помощью лазерной системы автоматического управления посадкой летательного аппарата [9], в которой излучатель луча лазера, состоящий из двух электромеханических преобразователей, на концах валов которых укреплено зеркало, и лазера, дополнительно снабжен параболоидом вращения с внутренней зеркальной поверхностью, видеокамерой и двухкоординатным столом. К внешней стороне вершины параболоида вращения жестко прикреплен палец штока телескопической стойки. Корпус шарового пальца телескопической стойки крепится к несущей платформе. Телескопическая стойка с шаровым пальцем корпусом шарового пальца соединяется с первым координатным столом, который перемещается вдоль оси ординат по направляющим основания стола первым электромеханическим преобразователем двухкоординатного стола. Основание первого координатного стола является вторым координатным столом, который перемещается вдоль оси абсцисс по направляющим основания стола вторым электромеханическим преобразователем двухкоординатного стола. Основание второго координатного стола своим основанием установлено на несущей платформе.
Внутри параболоида вращения установлена видеокамера, экран которой расположен между фокусом и вершиной параболоида и направлен к его вершине. Два электромеханических преобразователя с закрепленными зеркалами на концах их валов и лазер крепятся в области основания параболоида. При этом луч лазера отражается от первого зеркала, установленного на конце вала первого электромеханического преобразователя, и направляется в точку на зеркале второго электромеханического преобразователя, совпадающую с точкой пересечения осей параболоида и вала второго электромеханического преобразователя.
Далее луч лазера идет в направлении взлетно-посадочной полосы (площадки) или палубы авианосца с углами раскрытия конуса, атаки и рысканья, величины которых задаются электромеханическими преобразователями с закрепленными зеркалами на концах их валов. Электромеханические преобразователи двухкоординатного стола, изменяя положение в пространстве параболоида вращения, могут увеличивать значения углов атаки и рысканья луча лазера.
Луч лазера, отражаясь от поверхности взлетно-посадочной полосы (площадки) или палубы авианосца, попадает на зеркальную поверхность параболоида вращения, создавая замкнутую, четкую геометрическую фигуру, которая, отражаясь в направлении фокуса параболоида, регистрируется видеокамерой.
Лазерная система автоматического управления посадкой летательного аппарата, управляя двумя электромеханическими преобразователями двухкоординатного стола и двумя электромеханическими преобразователями с закрепленными зеркалами на концах их валов, вследствие их незначительной инерционности в сравнении с летательным аппаратом, удерживает изображение геометрической фигуры на экране видеокамеры, делая при этом его анализ, позволяющий определить удаление, скорость, углы крена, тангажа, рысканья, значения их производных летательного аппарата относительно взлетно-посадочной полосы (площадки) или палубы авианосца, и принимает оперативно решение о посадке или взлете летательного аппарата.
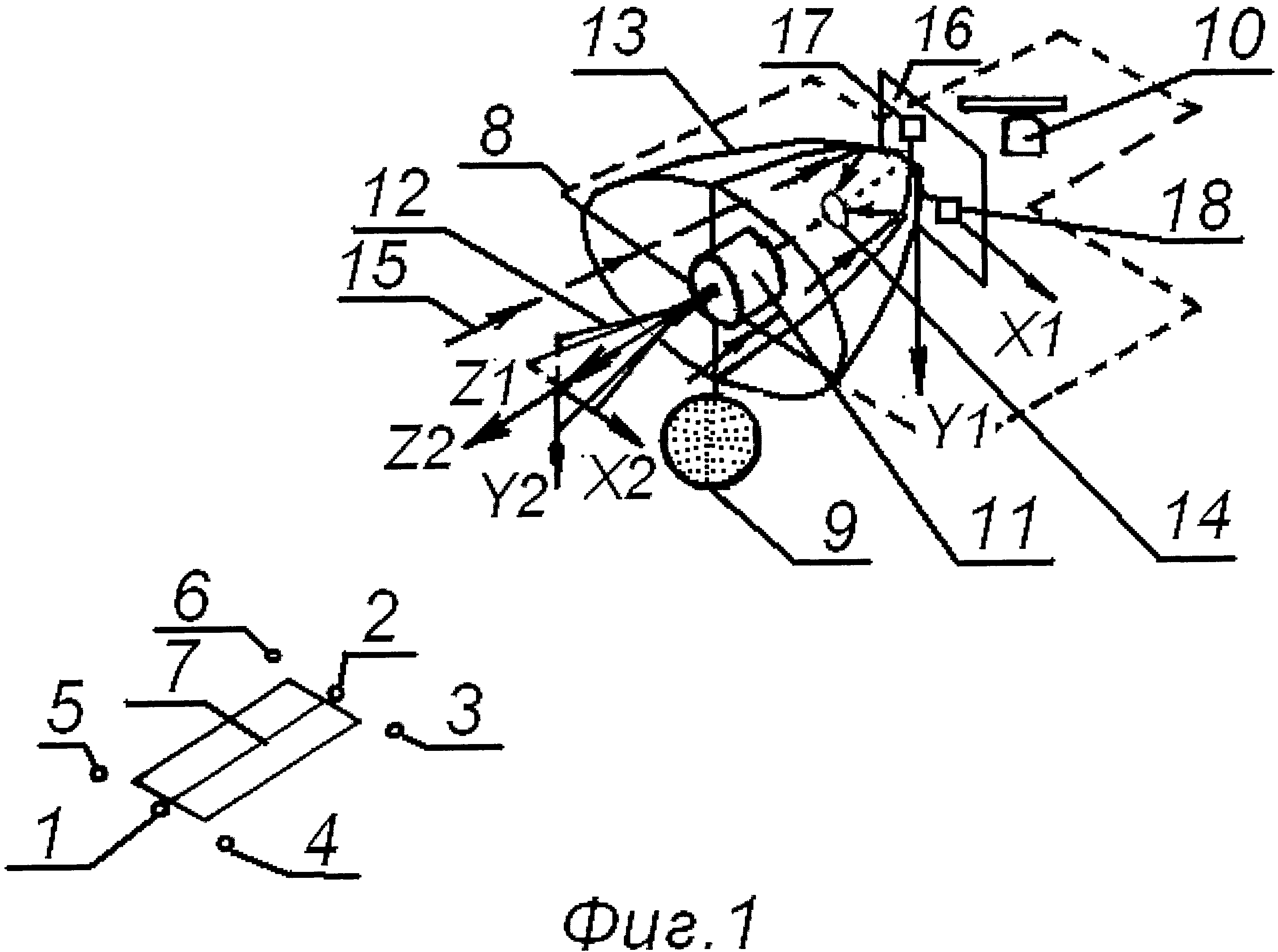
Лазерная система автоматического управления посадкой летательного аппарата (фиг.1) состоит из двух полусферических датчиков лазерного излучения 1, 2, четырех цилиндрических датчиков лазерного излучения 3, 4, 5, 6, сферического датчика лазерного излучения 9, радио-приемопередатчика 10, излучателя 11 луча лазера 12, параболоида 13, видеокамеры 14 и двухкоординатного стола 16 с электромеханическими преобразователями 17, 18.
Полусферические датчики лазерного излучения 1, 2 установлены по продольной линии взлетно-посадочной полосы 7 - в начале и в конце.
Четыре цилиндрических датчика лазерного излучения 3, 4, 5, 6 расположены по бокам взлетно-посадочной полосы 7 - в начале и в конце.
На летательном аппарате 8 размещены сферический датчик лазерного излучения 9, радио-приемопередатчик 10, излучатель 11 луча лазера 12, параболоид 13, видеокамера 14 и двухкоординатный стол 16 с двумя электромеханическими преобразователями 17 и 18.
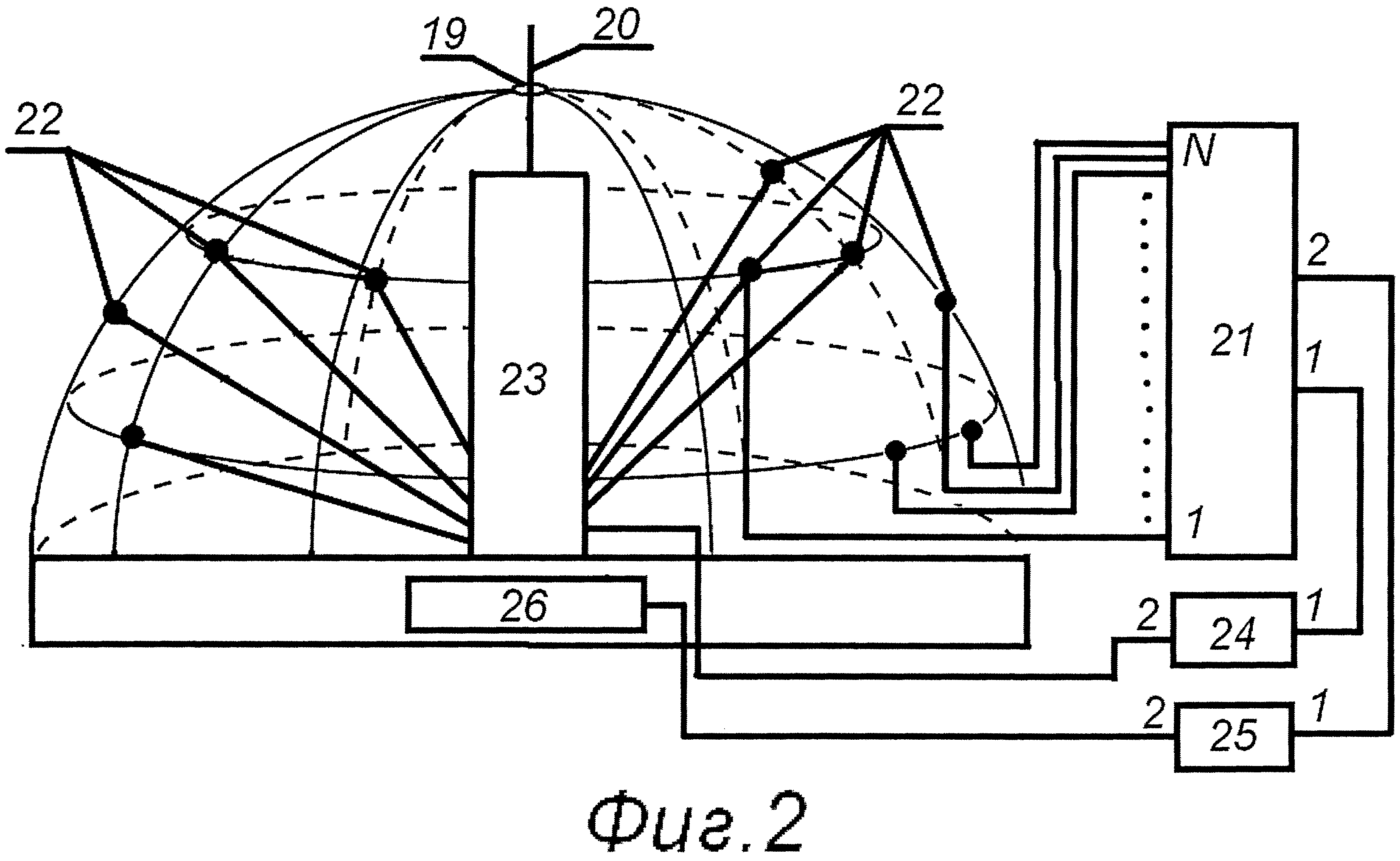
Полусферические датчики лазерного излучения 1, 2 (фиг.2) конструктивно не отличаются и имеют на полюсах отверстия 19 для прохода луча 20 лазера 23, а на поверхности полусферы размещены фотодиоды 22, которые укреплены с шагом дискретизации по углам пеленга и места. Фотодиоды 22 подключены к многоканальному входу 1…N контроллера полусферического датчика лазерного излучения 21, первый и второй входы-выходы которого подключены, соответственно, к первому входу-выходу контроллера лазера 24 и к первому входу-выходу контроллера радио-приемопередатчика 25 (фиг.2). Второй вход-выход контроллера лазера 24 соединен с входом-выходом лазера 23, а второй вход-выход контроллера радио-приемопередатчика 25 подключен к входу-выходу радио-приемопередатчика 26.
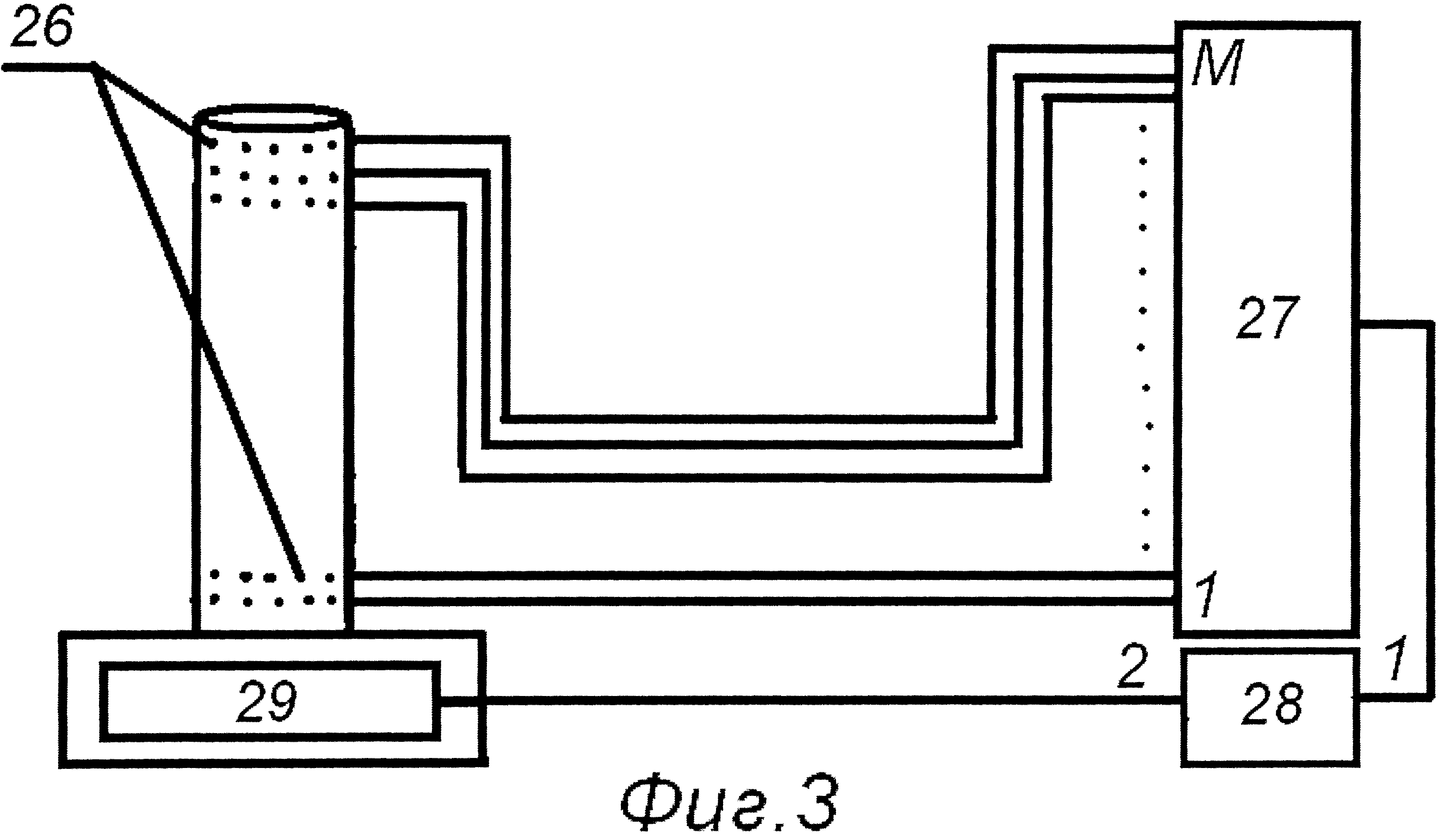
Цилиндрические датчики лазерного излучения 3, 4, 5, 6 (фиг.3) имеют идентичную конструкцию и на поверхности цилиндра размещены фотодиоды 26, которые укреплены с выбранным шагом дискретизации по углам пеленга и места. Фотодиоды 26 подключены к многоканальному входу 1…M контроллера цилиндрического датчика лазерного излучения 27, вход-выход которого соединен с первым входом-выходом контроллера радио-приемопередатчика 28, второй вход-выход которого подключен к входу-выходу радио-приемопередатчика 29.
Лазерный излучатель 11 (фиг.4) состоит из двух расположенных у основания параболоида 13 электромеханических преобразователей 30, 31 с закрепленными на концах их валов зеркалами, соответственно, 32 и 33, лазера 34, двухкоординатного стола 16 с двумя электромеханическими преобразователями 17 и 18, закрепленными в вершине параболоида 13, и встроенной в него видеокамеры 14. К внешней стороне вершины параболоида 13 (фиг.5) жестко прикреплен палец штока 46 телескопической стойки 47. Корпус шарового пальца 48 телескопической стойки 47 крепится к несущей платформе 49. Телескопическая стойка с шаровым пальцем 47 корпусом шарового пальца 50 соединяется с первым координатным столом 51, который перемещается вдоль оси Y1 по направляющим основания стола 52 первым электромеханическим преобразователем 17 двухкоординатного стола 16. Первый координатный стол 51 своим основанием 52 установлен на направляющие основания стола 53 и перемещается вторым вдоль оси X1 электромеханическим преобразователем 18 двух координатного стола 16. Направляющие основания стола 53 установлены на несущей платформе 49.
Входы-выходы электромеханических преобразователей 30, 31 подключены, соответственно, к вторым входам-выходам контроллеров управления электромеханическими преобразователями 35, 36, которые своими первыми входами-выходами соединены, соответственно, с первым и вторым входами-выходами контроллера лазерной системы автоматического управления посадкой летательного аппарата 37.
Третий и четвертый входы-выходы контроллера лазерной системы автоматического управления посадкой летательного аппарата 37, соединены, соответственно, с первым входом-выходом контроллера сферического датчика лазерного излучения 38 и с первым входом-выходом контроллера лазера 39. Второй вход-выход контроллера лазера 39 подключен к входу-выходу лазера 34, а второй вход-выход контроллера сферического датчика лазерного излучения 38 соединен с входом-выходом сферического датчика лазерного излучения 9.
Пятый и шестой входы-выходы контроллера лазерной системы автоматического управления посадкой летательного аппарата 37 подключены, соответственно, к входу-выходу системы регулирования углами крена, рысканья, атаки и силы тяги летательного аппарата 40 и к входу-выходу штатной радиолокационно-навигационной системы 41.
Седьмой и восьмой входы-выходы лазерной системы автоматического управления посадкой летательного аппарата 37 подключены, соответственно, к входам-выходам системы управления движением летательного аппарата по взлетно-посадочной полосе 42 и входам-выходам радио-приемопередатчику 10.
Девятый вход-выход лазерной системы автоматического управления посадкой летательного аппарата 37 подключен к первому входу-выходу контроллера видеокамеры 43. Второй вход-выход контроллера видеокамеры 43 подключен к входу видеокамеры 14.
Десятый и одиннадцатый входы-выходы контроллера лазерной системы автоматического управления посадкой летательного аппарата 37 подключены, соответственно, к первым входам-выходам контроллеров электромеханических преобразователей 44, 45 двухкоординатного стола 16. Вторые входы-выходы контроллеров электромеханических преобразователей 44, 45 двухкоординатного стола 16 подключены к входам-выходам электромеханических преобразователей, соответственно, 17, 18.
Способ посадки летательного аппарата реализуется следующим образом. При заходе летательного аппарата на глиссадную траекторию (точка А, фиг.6) штатная радиолокационно-навигационная система организации посадки летательного аппарата 41 со своего выхода-выхода выдает команду «Инициализация системы лазерной посадки», которая поступает на шестой вход-выход контроллера лазерной системы автоматического управления посадкой 37. В результате этого контроллер лазерной системы автоматического управления посадкой 37 на восьмой вход-выход выдает код команды «Захват датчиков лазерного излучения». Эта команда, поступая на вход-выход радио-приемопередатчика 10, транслируется на радио-приемопередатчики 26 (фиг.2) и 29 (фиг.3), соответственно, двух полусферических датчиков лазерного излучения 1, 2 и четырех цилиндрических 3, 4, 5, 6 датчиков лазерного излучения (фиг.1). Код команды «Захват датчиков лазерного излучения» с радио-приемопередатчиков 26 и 29 поступает, соответственно, на вторые входы-выходы контроллеров радио-приемопередатчиков, соответственно, 25 (фиг.2) и 28 (фиг.3). Декодируя принятую команду «Захват датчиков лазерного излучения», контроллеры 25, 28 инициализируют, соответственно, контроллер 21 полусферических датчиков лазерного излучения и контроллер 27 цилиндрических датчиков лазерного излучения, передавая код инициализации, соответственно, с первого входа-выхода контроллера 25 на второй вход-выход контроллера 21 и с первого входа-выхода контроллера 28 на вход-выход контроллера 27. После инициализации контроллер 21 с второго входа-выхода выдает код «Готов к захвату луча лазера», который поступает на первый вход-выход контроллера радио-приемопередатчика 25 кодируется и передается на вход-выход радио-приемопередатчика 26. Радио-приемопередатчик 26 транслирует информацию радио-приемопередатчику 10. Кроме этого, контроллер 21 выдает код «Включить лазер». Этот код поступает с первого входа-выхода котроллера 21 на первый вход-выход котроллера 24, а со второго входа-выхода контроллера 24 - на вход-выход лазера 23. Лазер 23 включается и его луч 20 направляется через отверстие 19 перпендикулярно плоскости взлетно-посадочной полосы 7 (фиг.1).
Контроллер 27 цилиндрических датчиков лазерного излучения после инициализации выдает код «Готов к захвату луча лазера», который поступает с входа-выхода на первый вход-выход контроллера радио-приемопередатчика 28, кодируется и передается с второго входа-выхода контроллера 28 на вход-выход радио-приемопередатчика 29. Радио-приемопередатчик 29 транслирует полученную информацию радио-приемопередатчику 10.
Радио-приемопередатчик 10 принимает коды «Готов к захвату луча лазера» от датчиков лазерного излучения 1, 2, 3, 4, 5, 6 и передает эти коды на восьмой вход-выход контроллера лазерной системы автоматического управления посадкой 37. Получив и обработав коды команд «Готов к захвату лазерного луча», контроллер лазерной системы автоматического управления посадкой 37 генерирует команду «Включение электромеханических преобразователей», которая с первого и второго входов-выходов контроллера лазерной системы автоматического управления посадкой 37 поступает, соответственно, на первые входы-выходы контроллеров управления электромеханическими преобразователями 35, 36. Контроллеры управления электромеханическими преобразователями 35, 36, управляют электромеханическими преобразователями, соответственно, 30, 31, которые обеспечивают поворот зеркал 32, 33 таким образом, чтобы отраженный от них луч 12 лазера 34 имел минимальный угол атаки γ (фиг.6). Далее контроллер лазерной системы автоматического управления посадкой 37 генерирует команды «Включить бортовой лазер», «Включить бортовой датчик лазерного излучения», «Включить видеокамеру» и «Включить двух координатный стол».
Код команды «Включить бортовой лазер» поступает с четвертого входа-выхода контроллера лазерной системы автоматического управления посадкой 37 на первый вход-выход контроллера лазера 39, второй вход-выход которого соединен входом-выходом лазера 34 и лазер 34 включается.
Код команды «Включить бортовой датчик лазерного излучения» с третьего входа-выхода контроллера лазерной системы автоматического управления посадкой 37 поступает на первый вход-выход контроллера сферического датчика лазерного излучения 38, второй вход-выход которого соединен с входом-выходом сферического датчика лазерного излучения 9. При этом контроллер сферического датчика лазерного излучения 38 включает сферический датчик лазерного излучения 9.
Код команды «Включить видеокамеру» с девятого входа-выхода контроллера лазерной системы автоматического управления посадкой 37 поступает на первый вход-выход контроллера видеокамеры 43, второй вход-выход которого соединен с входом-выходом видеокамеры 14. При этом контроллер видеокамеры 37 включает видеокамеру 14.
Код команды «Включить двухкоординатный стол» с десятого и одиннадцатого входов-выходов контроллера лазерной системы автоматического управления посадкой 37 поступает на первые входы-выходы контроллеров двухкоординатного стола, соответственно, 44 и 45. Контроллеры двухкоординатного стола 44, 45 выдают команду на включение электромеханических преобразователей, соответственно, 17, 18, которые изменяют положение параболоида 13, уменьшая угол атаки и изменяя угол рысканья параболоида таким образом, чтобы луч 12 лазера 14 был перпендикулярен поверхности Земли, а отраженный луч 15 лазера 14 попадал на зеркальную поверхность параболоида 13 и регистрировался бы видеокамерой 14.
На этом этап инициализации лазерной системы автоматического управления посадкой завершается (точка B, фиг.6).
Далее контроллер лазерной системы автоматического управления посадкой 37 выдает на первый, второй, десятый и одиннадцатый входы-выходы команду «Начать поиск датчиков лазерного излучения». Эта команда поступает, соответственно, на первые входы-выходы контроллеров управления электромеханическими преобразователями 35, 36 и на контроллеры двухкоординатного стола, соответственно, 44, 45. Контроллеры управления электромеханическими преобразователями 35, 36 обеспечивают работу электромеханических преобразователей, соответственно, 30 и 31, которые изменяют положение зеркал 32, 33 в пространстве таким образом, чтобы луч 12 лазера 34 вращался, образуя «конус» в пространстве, а на поверхности Земли траекторию перемещающейся по «спирали». При этом захват датчиков лазерного излучения 1, 2, 3, 4, 5, 6 осуществляется за счет управления направлением луча 12 лазера 32. Направление луча 12 лазера 32 определяется углами раствора конуса - α, атаки - γ и рысканья - β (фиг.6) При этом значения углов атаки - γ и рысканья - β дополнительно изменяются контроллерами 44, 45 электромеханических преобразователей 17, 18 двухкоординатного стола. При обнаружении двух полусферических датчиков лазерного излучения 1, 2 и четырех цилиндрических датчиков лазерного излучения 3, 4, 5, 6 луч 12 лазера 34 обеспечивает срабатывание фотодиодов 22 и 26. В результате этого, контроллер полусферического датчика лазерного излучения 21 на своем втором входе-выходе и контроллер цилиндрических датчиков лазерного излучения 27 на своем входе-выходе генерируют коды углов пеленга и места засвеченных фотодиодов 22, 26. Эта информация поступает, соответственно, на первые входы-выходы контроллеров радио-приемопередатчик, соответственно, 25 и 28, которые кодируют полученную информацию и передают на входы-выходы радио-приемопередатчиков, соответственно, 26, 29. Эта информация транслируется и радио-приемопередатчик 10, принимая эту информацию, передает ее на восьмой вход-выход контроллера лазерной системы автоматического управления посадкой 37. Поиск датчиков лазерного излучения 1, 2, 3, 4, 5, 6 считается выполненным, если информация с цилиндрических датчиков лазерного излучения 3, 4, 5, 6 позволяет контроллеру лазерной системы автоматического управления посадкой 37 сгенерировать устойчивую «виртуальную взлетно-посадочную полосу» 54 (фиг.6) с обходом цилиндрических лазерных датчиков 3, 4, 5, 6.
С этого момента времени контроллер лазерной системы автоматического управления посадкой 37 начинает передавать данные с пятого входа-выхода на вход-выход бортовой системы регулирования углами крена, рысканья, атаки и тяги летательного аппарата 40 (фиг.4), обеспечивая выполнение этапа дальнего выравнивания летательным аппаратом (интервал ВС, фиг.6).
Процесс дальнего выравнивания летательного аппарата завершается, если «виртуальная взлетно-посадочная полоса» 54, снижаясь, касается полусферических лазерных датчиков 1, 2. С этого момента времени начинается режим ближнего выравнивания летательного аппарата (интервал CD, фиг.6). Цель режима состоит в том, чтобы траектория полета летательного аппарата с максимальной точностью совпала с продольной линией взлетно-посадочной полосы 7 и проходила через полусферические датчики лазерного излучения 1, 2. Поэтому, перед моментом пролета летательного аппарата над полусферическим лазерным датчиком 2, контроллер лазерной системы автоматического управления посадкой 37 выдает команду «Контроль взлетно-посадочной полосы». Эта команда с первого, второго, десятого и одиннадцатого входа-выхода контроллера 37 поступает на первые входы-выходы, соответственно, контроллеров управления электромеханическими преобразователями 35, 36 и 44, 45 которые, управляя электромеханическими преобразователями 30, 31 и 17, 18, луч 12 лазера 34 направляют прямо по курсу с минимальным углом атаки - α (фиг.6). Цель команды «Контроль взлетно-посадочной полосы» - обеспечить облучение лучом 12 лазера 34 полусферических датчиков лазерного излучения 1, 2 и лучом 20 лазера 23 (фиг.2) - сферического датчика лазерного излучения 9 (фиг.1).
В результате реализации этого процесса информация, полученная с полусферических датчиков лазерного излучения 1, 2 и сферического датчика лазерного излучения 9, используется контроллером лазерной системы автоматического управления посадкой 37 для окончательного расчета траектории полета и скорости полета летательного аппарата вблизи взлетно-посадочной полосы 7.
Кроме этого, контроллер лазерной системы автоматического управления посадкой 37 анализирует полученные данные с датчиков лазерного излучения 1, 2, 9 и выдает команду «Приземление» или «Взлет». Если контроллером 37 выдана команда «Взлет», то с пятого входа-выхода контролера 37 информация поступает на вход-выход бортовой системы регулирования углами атаки, крена, рысканья и тяги 40, обеспечивая взлет летательного аппарата. Если контроллер 37 выдал команду «Приземление», то с седьмого входа-выхода команда передается на вход-выход системы управления движением летательного аппарата по взлетно-посадочной полосе 42. При этом контроллер лазерной системы автоматического управления посадкой 37 выдает также команду «Луч лазера по курсу» на первый, второй, десятый и одиннадцатый свои входы-выходы. С этих входов-выходов команда поступает на первые входы-выходы контроллеров управления электромеханическими преобразователями 35, 36 и 44, 45, которые управляют, соответственно, электромеханическими преобразователями 30, 31 и 17, 18. При этом зеркала 30, 31 направляют луч 12 лазера 34 по курсу движения летательного аппарата с целью захвата датчиков лазерного излучения 1, 4, 5. Информация, поступающая с датчиков лазерного излучения 1, 4, 5, передается на радио-приемопередатчики 26, 29. Радио-приемопередатчик 10 принимает эту информацию и передает ее на восьмой вход-выход контроллера лазерной системы автоматического управления посадкой 37. Контроллер лазерной системы автоматического управления посадкой 37 обрабатывает поступающую информацию и на седьмой вход-выход выдает данные, которые поступает на вход-выход системы управления движением летательного аппарата по взлетно-посадочной полосе 42. При этом управление движением летательным аппаратом осуществляется до полной остановки летательного аппарата на продольной линии взлетно-посадочной полосе 7.
В случае посадки летательного аппарата на качающуюся платформу или палубу корабля контроллер лазерной системы автоматического управления посадкой 37, обрабатывая информацию, передаваемую датчиками лазерного излучения 1, 2, 3, 4, 5, 6, определяет параметры качки платформы или палубы корабля и выполняет расчет траектории посадки летательного аппарата на качающуюся платформу или палубу корабля. При этом контроллер лазерной системы автоматического управления посадкой 37 раскачивает летательный аппарат, приближая его параметры качки к параметрам качки платформы или палубы корабля, обеспечивая мягкую посадку летательного аппарата на платформу или палубу корабля.
Процесс автоматической посадки летательного аппарата идет под контролем видеокамеры 14, на экран которой попадают отраженные от рельефа Земли свет и луч 15 лазера 34 (фиг.4). При этом экран видеокамеры 14 находится на расстоянии L от фокуса параболоида 13 и направлен к вершине параболоида 13. Так как луч 12 лазера 34 вращается, то на экране видеокамеры формируются треки прохождения отраженного луча 15 лазера 34 на фоне света. С помощью контроллера видеокамеры 43 выполняется фильтрация полученного изображения с целью выявления треков отраженного луча 15 лазера 34. Анализ треков отраженного луча 15 лазера 34 позволяет определить скорость летательного аппарата 8 относительно взлетно-посадочной полосы 7 (площадки), углы крена, тангажа, атаки, значения их производных, и структуру рельефа местности в районе посадки. Так если допустить, что стохастический процесс посадки летательного аппарата является детерминированным и по курсу полета появилось препятствие в виде плоскости, которая перпендикулярна траектории полета, то на экране видеокамеры 14 будет наблюдаться трек в виде окружности. Диаметр окружности будет уменьшаться при приближении к плоскости и увеличиваться при удалении от плоскости. Таким образом, можно определить скорость и ускорение летательного аппарата относительно плоскости. Если траектория полета не перпендикулярна к плоскости, то на экране видеокамеры 14 будет формироваться трек виде эллипса. По углам наклона эллипса можно определить углы рысканья, тангажа и крена летательного аппарата.
В случае наличия впадины на плоскости диаметр трека увеличиться при прохождении лучом лазера 12 впадины и уменьшится при прохождении лучом лазера 12 возвышенности.
Сканирование рельефа взлетно-посадочной полосы 7 (площадки) палубы корабля контроллер системы автоматического управления посадкой летательного аппарата 37 осуществляет изменяя углы раскрытия конуса, атаки и рысканья луча 12 лазера 34. Обработка полученных треков позволяет сгенерировать трехмерную карту рельефа впереди лежащей плоскости.
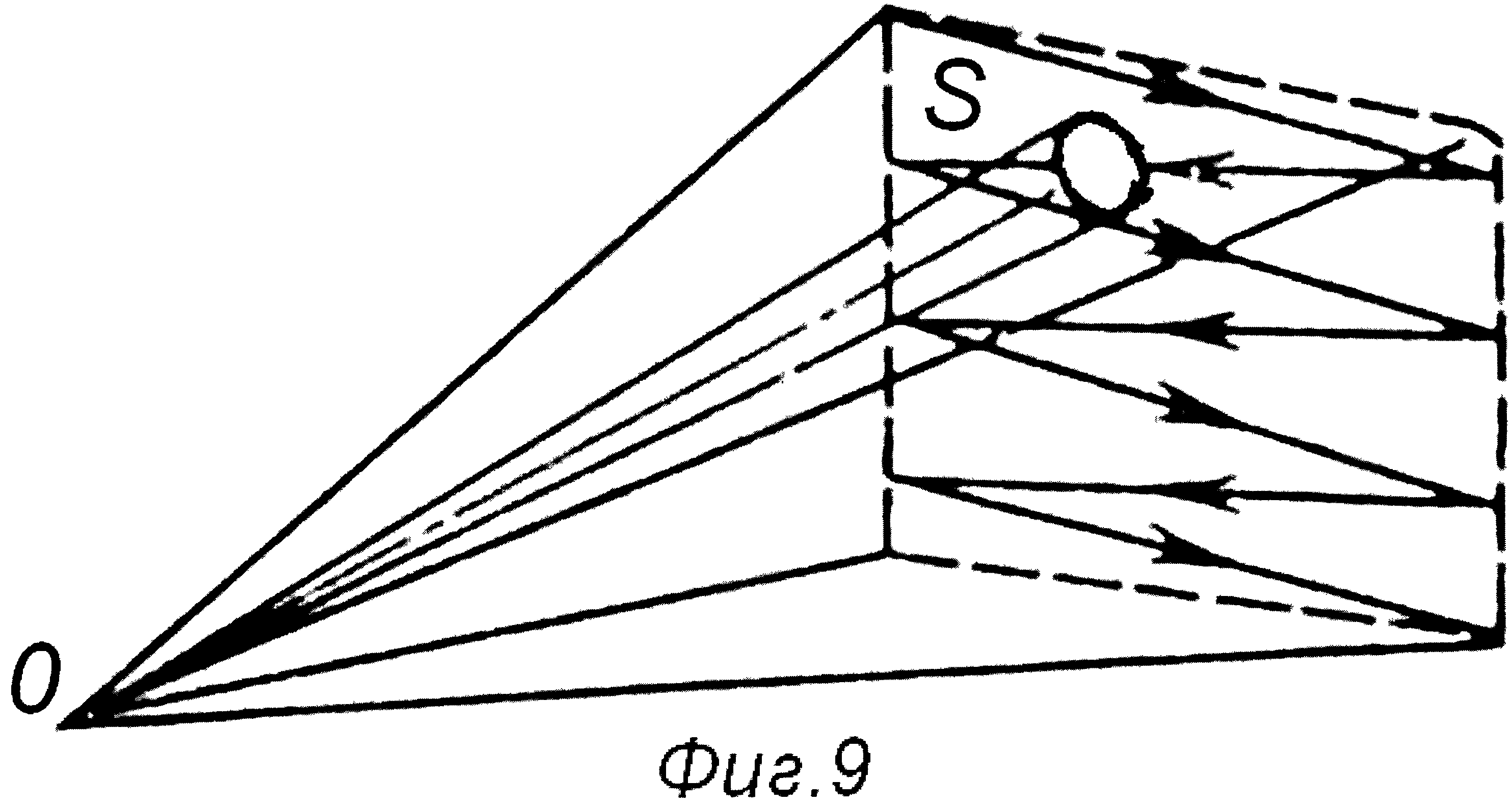
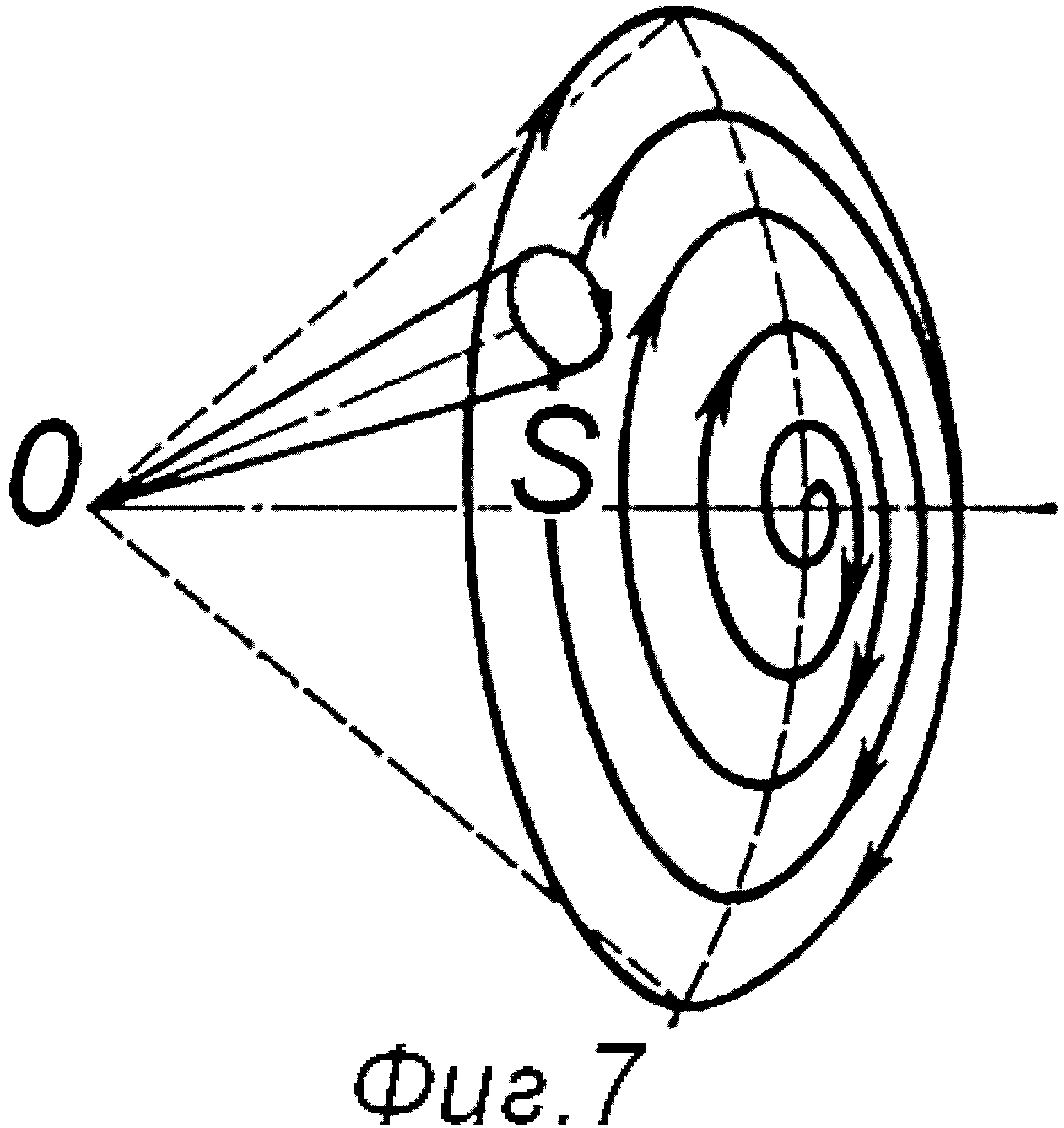
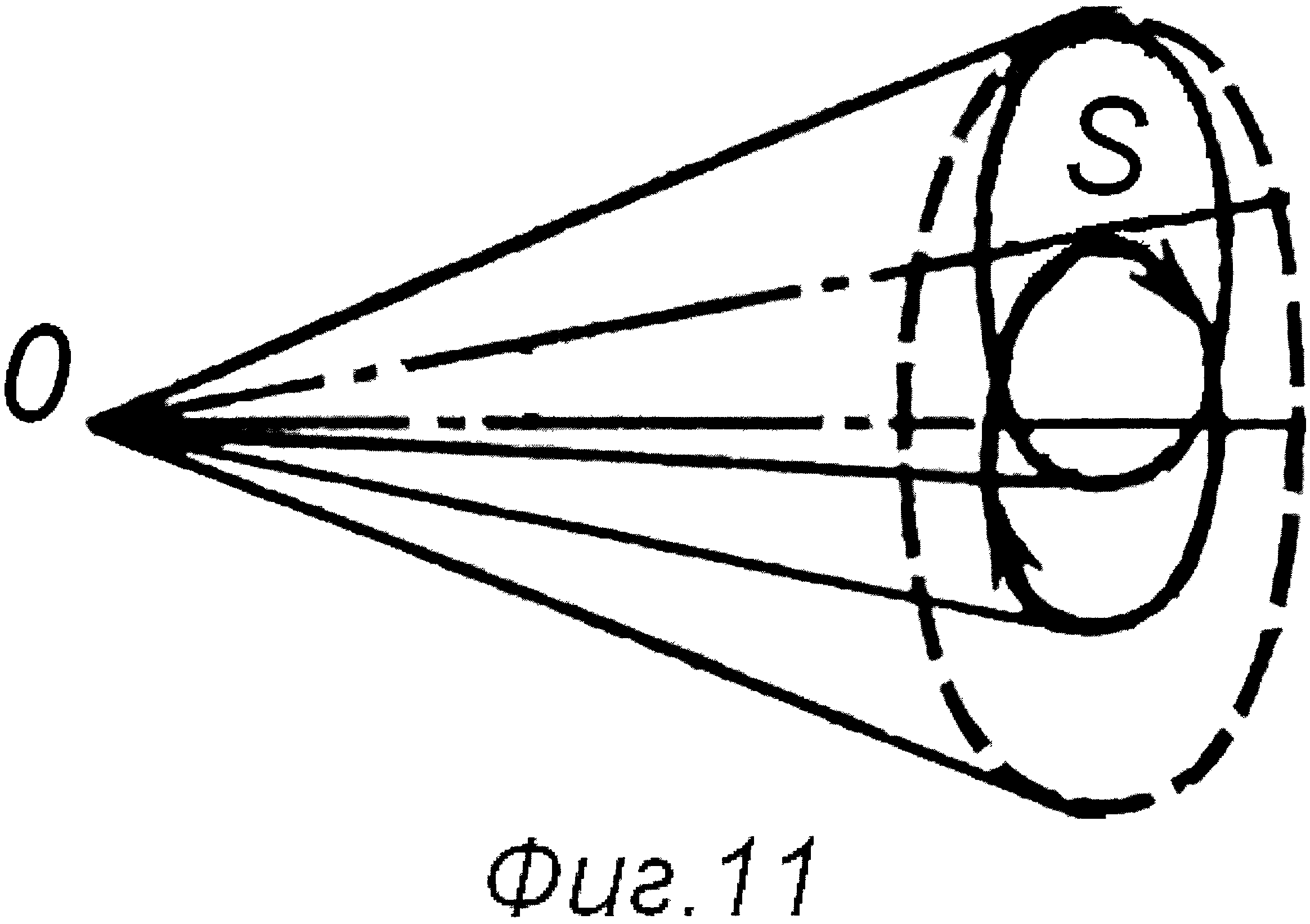
Контроллер лазерной системы автоматического управления 37 выдает команды на следующие режимы сканирования: спиральное сканирование (фиг.7), поступательно-коническое сканирование (фиг.8), зигзагообразное сканирование (фиг.9, фиг.10), коническое сканирование (фиг.11). Режим сканирования обеспечивают контроллеры 44, 45 двухкоординатного стола 16, которые управляют электромеханическими преобразователями 17, 18. Область сканирования S реализуется контроллерами 35, 36 электромеханических преобразователей, соответственно, 30, 31.
В результате обработки контроллером видеокамеры 41 потока данных, получаемого с видеокамеры 14, лазерная система автоматического управления может выполнить посадку летательного аппарата и при отсутствии (или неисправности) датчиков лазерного излучения 1, 2, 3, 4, 5, 6.
Положительный эффект изобретения заключается в повышении экономичности, надежности, оперативности и функциональности посадки летательного аппарата за счет лазерной системы автоматического управления посадкой, в которой излучатель луча лазера, состоящий из двух электромеханических преобразователей, на концах валов которых укреплено зеркало, и лазера, дополнительно снабжен параболоидом вращения с внутренней зеркальной поверхностью, внутри которого между его фокусом и вершиной установлена видеокамера, а основание вершины параболоида вращения жестко соединена с телескопической стойкой двух координатного стола.
Экономичность лазерной системы автоматического управления посадкой состоит в том, что она, обладая большими углами рысканья и атаки луча лазера, позволяет использовать навигационные системы ГЛОНАС и GPS, обеспечивая при этом заход на посадку по криволинейной траектории, обеспечивая экономию топлива летательного аппарата и, тем самым, улучшая экологическое пространство в районе аэродрома.
Надежность лазерной системы автоматического управления посадкой состоит в том, что она использует два принципа организации посадки. Первый основан на использовании аэродромного оборудования, роль которого выполняют датчики лазерного излучения, и второй основан на лазерном видеоконтроле, роль которого выполняет видеокамера регистрации отраженного луча лазера от поверхности взлетно-посадочной полосы.
Оперативность лазерной системы автоматического управления посадкой позволяет осуществить поиск, выполнить дальнее и ближнее выравнивание летательного аппарата при подлете к взлетно-посадочной полосе, а также определить навигационные параметры и параметры траектории движения летательного аппарата в момент посадки и движении по взлетно-посадочной полосе в режиме реального времени.
Дополнительная функциональность лазерной системы автоматического управления посадкой летательным аппаратом характеризуется тем, что она, используя непрерывный и импульсный режим работы лазера, позволяет оценить структуру рельефа местности в области взлетно-посадочной полосы, исключить столкновение с возможными препятствиями, возникающими по курсу полета по глиссаде, осуществить посадку на взлетно-посадочную полосу в сложной гористой местности, выполнить маловысотный полет на пересеченной местности, а для вертолета, дополнительно, может обеспечить полет на малой высоте, среди высотных зданий, труб, высоковольтных линий электропередач и выполнить посадку на площадку, оценив предварительно ее рельеф.
Таким образом, лазерная система автоматического управления посадкой летательного аппарата, обладая техническим зрением, позволяет снизить вероятность зависимости посадки от метеоусловий и исключить человеческий фактор, влияющий на посадку летательного аппарата.
Литература
1. Ю.Г.Кассин и др. Автоматическое управление самолетом при заходе на посадку. Рига, Институт инженеров ГА, 1979 г.
2. Патент США №4101893, кл. 343-108, 1978 г.
3. Патент Германии №3629911, кл. B64F 1/18, 1993 г.
4. Патенты РФ №1804629, кл. G08G 5/02, 1993 г.
5. Патент РФ №1836642, кл. G01S 13/00, 1993 г.
6. Патент РФ №2369532 С2, МПК: B64F 1/18.
7. Документальный фильм «Лазерная система посадки». Режим доступа: http://www.avsim.su/f/dokumentalnie-filmi-i-syuzheti-96/lazernaya-sistema-posadki-koordinata38362.html?action=viewonline.
8. Заявка Японии №56-112398, кл. B64D 45/08, 1981 г.
9. Заявка РФ №2011133386/11, кл. B64F 1/18 (2006.01), 04.12.2012 г.
10. Научно-популярный фильм «Автоматическая посадка и оптический поток». Режим доступа: http://rutracker.org/forum/viewtopic.php?t=3520535/1.
11. Ю.А.Соловьев. Системы спутниковой навигации. - М.: Эко-Трендз, 2000. - 270 с.
12. Т.В.Сазонова, Н.В.Симкин. Методы высокоточной автономной коррекции текущих координат местоположения ЛА по изображениям датчиков технического зрения. - М.: Всероссийская научно-техническая конференция Навигация, наведение и управление летательными аппаратами. Тезисы докладов. ООО Издательство «Научтехлитиздат», 2012. - 224 с.
Способ посадки летательного аппарата, включающий автоматический поиск и выход на глиссадную траекторию штатными приводными радиолокационными и навигационными системами летательного аппарата, отличающийся тем, что с целью повышения надежности посадки летательного аппарата, лазерный излучатель лазерной системы автоматического управления посадкой летательного аппарата снабжен параболоидом вращения с внутренней зеркальной поверхностью, внутри которого между его фокусом и вершиной установлена видеокамера, а основание вершины параболоида вращения жестко соединено с телескопической стойкой двухкоординатного стола с двумя электромеханическими преобразователями, входы-выходы которых соединены, соответственно, с вторыми входами-выходами контроллеров электромеханических преобразователей двухкоординатного стола, первые входы-выходы котроллеров двухкоординатного стола соединены, соответственно, с десятым и одиннадцатым входом-выходом контроллера лазерной системы автоматического управления, который первым входом-выходом соединен с первым входом-выходом первого контроллера управления первым электромеханическим преобразователем, вход-выход которого соединен с электромеханическим преобразователем, на конце вала которого укреплено первое зеркало, вторым входом-выходом контроллер подключен к первому входу-выходу второго контроллера управления вторым электромеханическим преобразователем, вход-выход которого подключен к второму электромеханическому преобразователю, на конце вала которого укреплено второе зеркало, третьим входом-выходом контроллер подключен к первому входу-выходу контроллера сферического датчика лазерного излучения, который вторым многоканальным входом подключен к фотодиодам, которые укреплены на поверхности сферы с дискретным шагом по углам пеленга и места, четвертый вход-выход контроллера соединен с первым входом-выходом контроллера лазера, второй вход-выход которого соединен с входом лазера, пятый вход-выход контролера подключен к входу-выходу системы регулирования, углами атаки, крена, рысканья и тяги летательного аппарата, шестой вход-выход контроллера соединен с входом-выходом штатных приводных радиолокационно-навигационных систем, седьмой вход-выход контроллера подключен к входу-выходу системы управления движением летательного аппарата по взлетно-посадочной полосе, восьмой вход-выход контроллера соединен с входом-выходом радио-приемопередатчика, который обеспечивает дуплексную радиосвязь с радио-приемопередатчиками идентичных двух полусферических датчиков лазерного излучения и четырех цилиндрических датчиков лазерного излучения, вход-выход радио-приемопередатчика полусферического датчика лазерного излучения подключен к второму входу-выходу контроллера радио-приемопередатчика, первый его вход-выход соединен со вторым входом-выходом контроллера полусферического датчика лазерного излучения, к многоканальному входу которого подключены фотодиоды, которые укреплены на поверхности полусферы с дискретным шагом по углам пеленга и места, первый вход-выход контроллера подключен к первому входу-выходу контроллера лазера, вход-выход радио-приемопередатчика цилиндрического датчика лазерного излучения подключен к второму входу-выходу контроллера радио-приемопередатчика, первый вход-выход его соединен с входом-выходом контроллера цилиндрического датчика лазерного излучения, многоканальный вход которого соединен с фотодиодами, которые укреплены на поверхности цилиндра с дискретным шагом по углам пеленга и места, девятый вход-выход контроллера подключен к первому входу-выходу контроллера видеокамеры, второй вход-выход которой подключен к входу-выходу видеокамеры.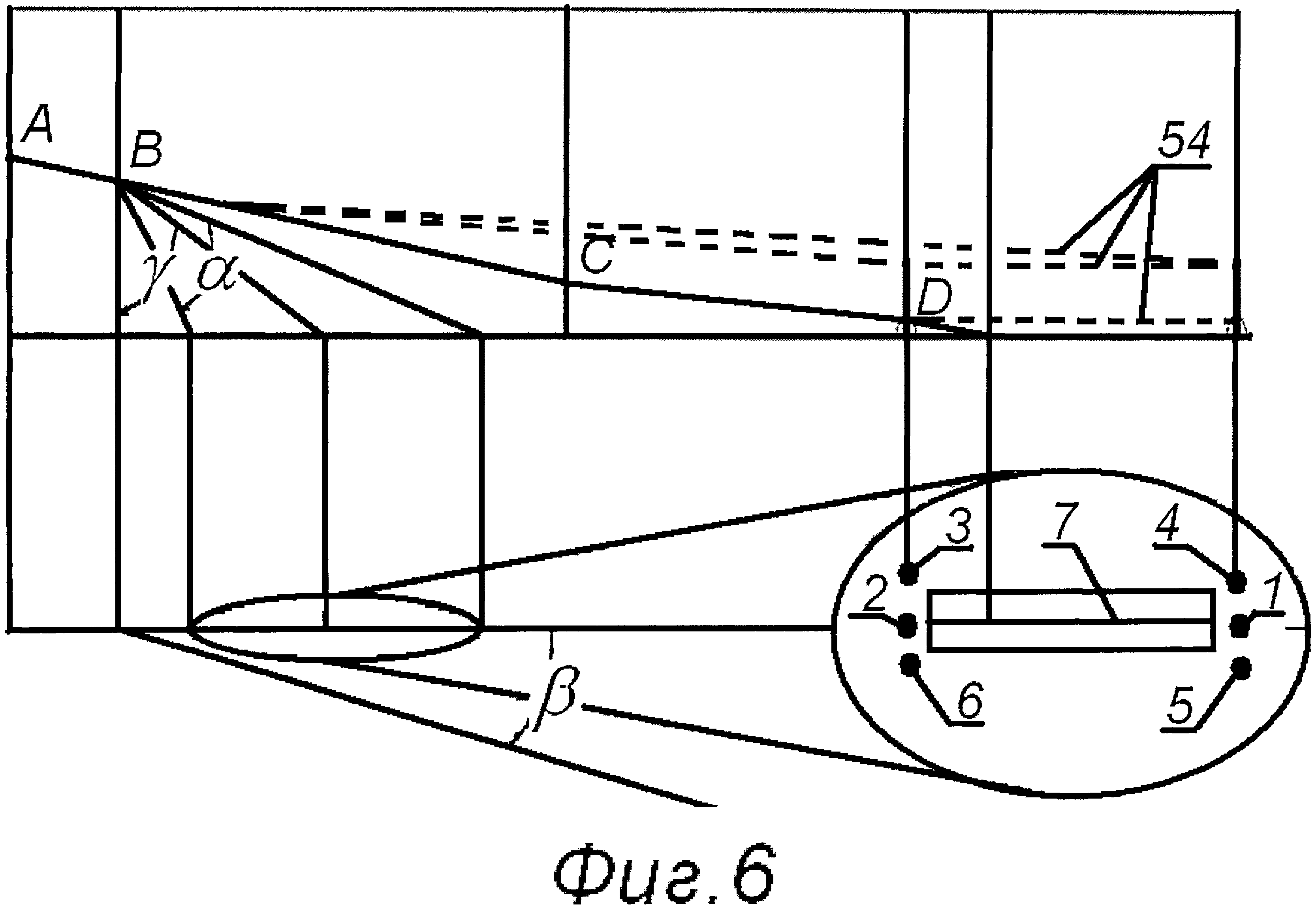
Способ посадки летательного аппарата
Комплексная корреляционно-экстремальная навигационная система
Способ посадки летательного аппарата
Способ посадки летательного аппарата
Комплексная корреляционно-экстремальная навигационная система
Способ посадки летательного аппарата

