Результат интеллектуальной деятельности: СПОСОБ КОНТРОЛЯ ВЫСТАВКИ ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ
Вид РИД
Изобретение
Изобретение относится к навигационной технике и может быть использовано для контроля гиростабилизированных платформ космического назначения при заводских и предпусковых испытаниях систем управления ракетоносителей, разгонных блоков, космических и летательных аппаратов.
Известен способ выставки инерциальной системы управления в режиме гирокомпасирования с оптическим контролем [1]. С помощью системы, работающей в этом режиме, платформа до момента старта удерживается в горизонте и выставляется по азимуту. При этом для постоянных по величине погрешностей акселерометров и гироскопов предусмотрено введение соответствующих балансировочных сигналов.
Однако этот способ при использовании его в целях контроля точности гирокомпасирования прецизионных инерциальных систем обладает низкой точностью, т.к. при выработке балансировочных сигналов учитывает только постоянные (систематические) составляющие погрешностей акселерометров и гироскопов и не учитывает случайных составляющих. Так, известно, что случайная составляющая дрейфа гироскопа величиной 0.01 град/час вызывает для средних широт погрешность гирокомпасирования порядка 4 угл.мин. Другим недостатком известного способа является необходимость размещения на внутренней раме карданова подвеса гиростабилизированной платформы оптического элемента (зеркало, призма) и обеспечение с ним через герметичное прозрачное окно оптической связи с опорным геодезическим направлением, что существенно усложняет конструкцию инерциальной системы.
Наиболее близким техническим решением является способ контроля выставки гиростабилизированной платформы инерциальной системы, включающий начальную выставку, определение ориентации системы координат, связанной с гиростабилизированной платформой, относительно местной горизонтальной системы координат, связанной с Землей, вычисление результата автономного определения азимута гиростабилизированной платформы [2].
Недостатком известного способа при его применении для контроля результата выставки гиростабилизированной платформы в азимуте является малая достоверность контроля, т.к. выставка осуществляется только средствами инерциальной системы, в которую входит гиростабилизированная платформа, не используя при этом внешние независимые средства.
Технический результат изобретения заключается в повышении достоверности контроля начальной выставки гиростабилизированной платформы инерциальной системы.
Указанный технический результат достигается тем, что в известном способе контроля выставки гиростабилизированной платформы инерциальной системы, включающем начальную выставку, определение ориентации системы координат, связанной с гиростабилизированной платформой, относительно местной горизонтальной системы координат, связанной с Землей, вычисление результата автономного определения азимута гиростабилизированной платформы αη, дополнительно определяют астрономический азимут АКЭ контрольного элемента гиростабилизированной платформы, положение нормали к которому совпадает с нулевым отсчетом датчика угла φ, на момент окончания начальной выставки фиксируют угол φ гиростабилизированной платформы вокруг оси карданова подвеса и оспределяют погрешность гирокомпасирования ΔA:
ΔA=αη-АКЭ-φ,
считают выставку гиростабилизированной платформы прошедшей контроль, если погрешность гирокомпасирования не превышает допустимого значения.
На фиг.1 представлены системы координат, используемые при контроле начальной выставки, представлены системы координат, используемые при контроле начальной выставки: система координат X0, Y0, Z0, реализуемая ГСП, и местная горизонтальная система координат ζ, η, ξ, ось η которой имеет направление, противоположное направлению g, а ось ξ направлена в сторону Севера. Обе системы координат - ортогональные правые с началом 0 в месте расположения ГСП.
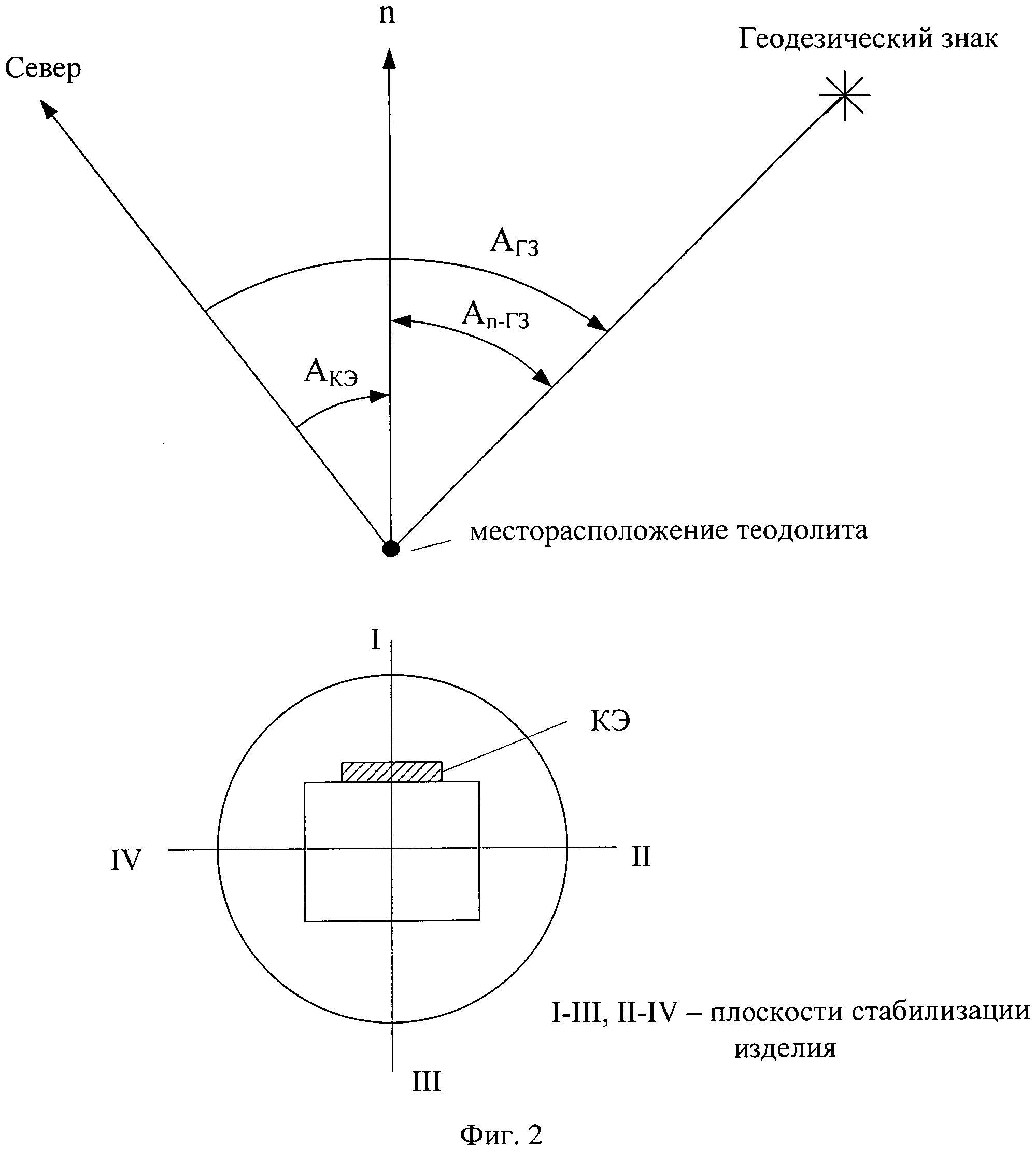
На фиг.2 представлена схема расположения контрольного элемента, установленного на корпусе гиростабилизированной платформы, геодезического знака, которым оборудовано место пуска ракет, и показаны угловые величины, используемые при определении астрономического азимута контрольного элемента.
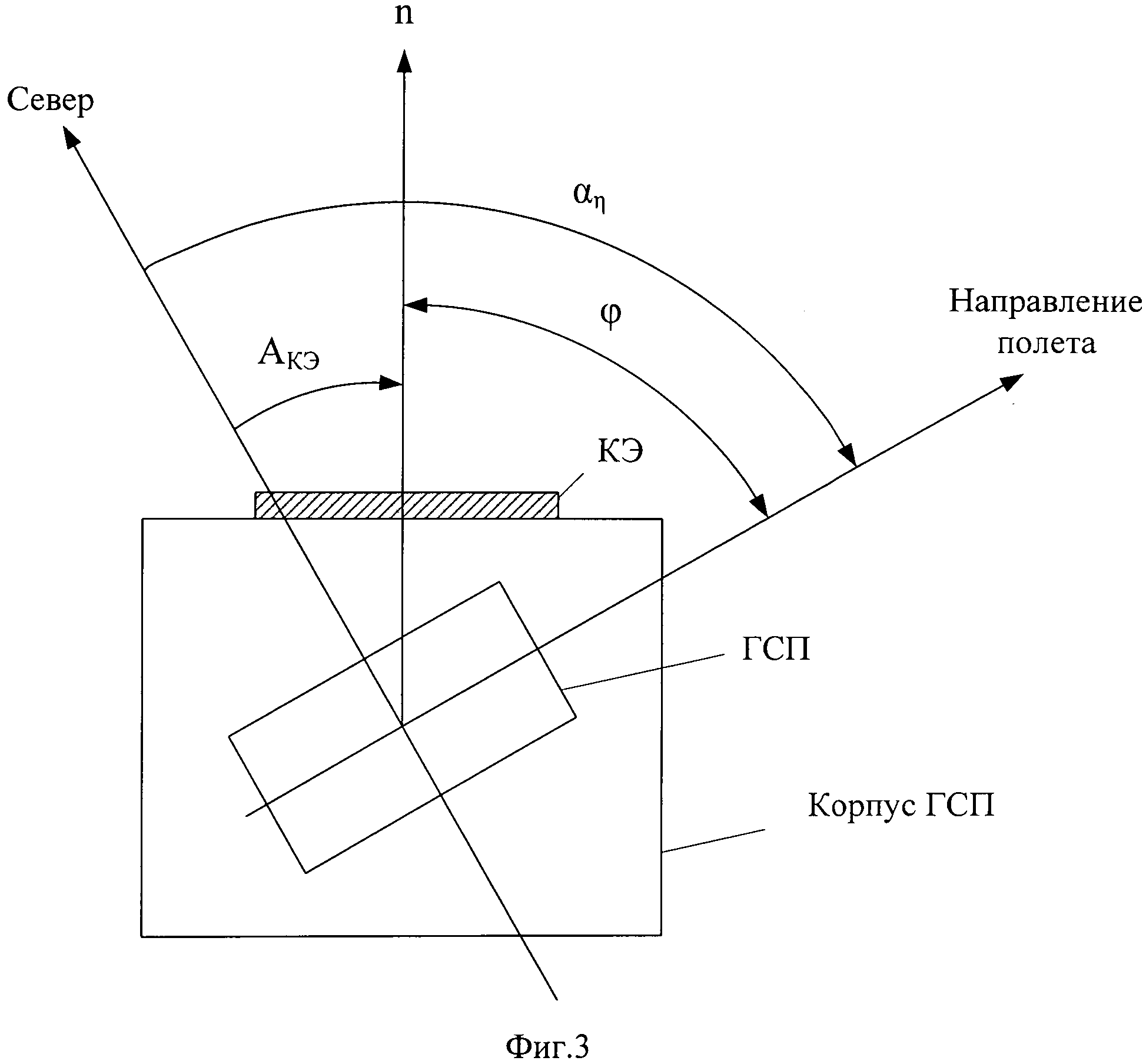
На фиг.3 представлена упрощенная кинематическая схема гиростабилизированной платформы и показаны угловые величины, используемые при реализации способа.
Способ контроля выставки гиростабилизированной платформы (ГСП) инерциальной системы реализуют следующим образом.
Осуществляют начальную выставку ГСП известным методом гирокомпасирования, сущность которого заключается в определении матрицы C0 направляющих косинусов системы координат X0, Y0, Z0, реализуемой ГСП, относительно местной горизонтальной системы координат ζ, η, ξ, одна из горизонтальных осей (ξ) которой ориентирована на Север (фиг.1).
При определении матрицы C0 используют информацию акселерометров в четырех ориентациях ГСП, работающей в инерциальном режиме. В этих ориентациях плоскость X0, Z0, реализуемую ГСП, приводят в плоскость местного горизонта, а ось OX0 последовательно ориентируют в направлениях на Север, Юг, в направлении, противоположном полету, и в направлении полета. После заключительной ориентации плоскость X0, Z0 ГСП ориентирована в плоскости горизонта и ось X0 - в направлении полета.
По завершении начальной выставки по датчикам углов, расположенных на осях карданова подвеса, производят измерение углов φ, ψ, υ, характеризующих угловое положение ГСП относительно корпуса.
Из матрицы C0 вычисляют величину угла αη между направлением на Север и проекцией на плоскость горизонта оси X0 ГСП:

где C0, ij - элемент i-й строки j-го столбца матрицы C0 на момент завершения начальной выставки.
Определяют азимут нормали контрольного элемента АКЭ:

где АГЗ - астрономический азимут визирного направления на удаленный геодезический знак. Определяется однократно одним из известных методов, применяемых в геодезии, при оборудовании места пуска ракет [3];
An-ГЗ - угол между направлением на геодезический знак и нормалью к контрольному элементу. Определяется при помощи теодолита, расположенного в плоскости I-III стабилизации изделия со стороны контрольного элемента (фиг.2), по разнице отсчетов по лимбу теодолита при наведении теодолита сначала на внешнюю зеркальную поверхность контрольного элемента (нормаль КЭ), а затем на геодезический знак.
Положение ГСП в горизонтальной плоскости по азимуту (фиг.3) определяется углом φ, измеряемым датчиком угла карданова подвеса ГСП, между направлением полета и нормалью к контрольному элементу (КЭ), расположенному на корпусе ГСП таким образом, что положение его нормали соответствует нулевому отсчету датчика угла по φ. В качестве контрольного элемента обычно используют зеркало.
При идеальном гирокомпасировании (фиг.3) будет выполняться соотношение:

Однако из-за инструментальных погрешностей ГСП, главным образом из-за нестабильности дрейфов ГСП, при регистрации выходных сигналов акселерометров в различных ориентациях ГСП на практике возникает погрешность гирокомпасирования ΔА, определяемая как:

Считают выставку гиростабилизированной платформы прошедшей контроль, если погрешность гирокомпасирования ΔА не превышает допустимого значения.
Так, например, для обеспечения вывода космических аппаратов телекоммуникационного назначения это допустимое значение составляет 6 угловых минут. В этом случае при получении значения менее 6 угловых минут ГСП считается прошедшей контроль с положительными результатами для обеспечения требуемой точности вывода космического аппарата.
Предельная погрешность δА предлагаемого метода контроля может быть определена как:

где δαη - погрешность определения матрицы C0 по информации акселерометров;
δАКЭ - погрешность определения азимута нормали КЭ АКЭ при помощи теодолита и использования азимута направления на геодезический знак АГЗ;
δφ - погрешность определения положения ГСП датчиком угла φ.
При использовании акселерометров со случайной составляющей погрешности 10-5 g, азимута АГЗ с точностью 20 угл.с, датчика угла φ с ценой младшего разряда 20 угл.с, т.е. при δαη=2 угл.с, δАКЭ=20 угл.с и δφ=20 угл.с предельная погрешность контроля выставки ГСП по азимуту составляет 28.3 угл.с.
Таким образом, предложенный способ обеспечивает требуемую точность и позволяет повысить достоверность контроля начальной выставки гиростабилизированной платформы инерциальной системы за счет осуществления контроля с помощью независимых оптических и геодезических средств.
Источники информации
1. «Инерциальная навигация» под редакцией К.Ф.О' Доннела, М., издательство «Наука», 1969, стр.514.
2. «Авиационные приборы и навигационные системы» под редакцией О.А. Бабича, издание ВВИА им. Н.Е. Жуковского, 1981, стр.523-525.
3. «Справочник геодезиста» под редакцией В.Д. Большакова, Г.П. Левчука, книга 1, М., издательство «Недра», 1985, стр.257-259, стр.428-435.
Способ контроля выставки гиростабилизированной платформы инерциальной системы, включающий начальную выставку, определение ориентации системы координат, связанной с гиростабилизированной платформой, относительно местной горизонтальной системы координат, связанной с Землей, вычисление результата автономного определения азимута гиростабилизированной платформы α, отличающийся тем, что определяют астрономический азимут А контрольного элемента гиростабилизированной платформы, положение нормали к которому совпадает с нулевым отсчетом датчика угла φ, на момент окончания начальной выставки фиксируют угол φ гиростабилизированной платформы вокруг оси карданова подвеса и определяют погрешность гирокомпасирования ΔА:ΔА=α-А-φ,считают выставку гиростабилизированной платформы прошедшей контроль, если погрешность гирокомпасирования не превышает допустимого значения.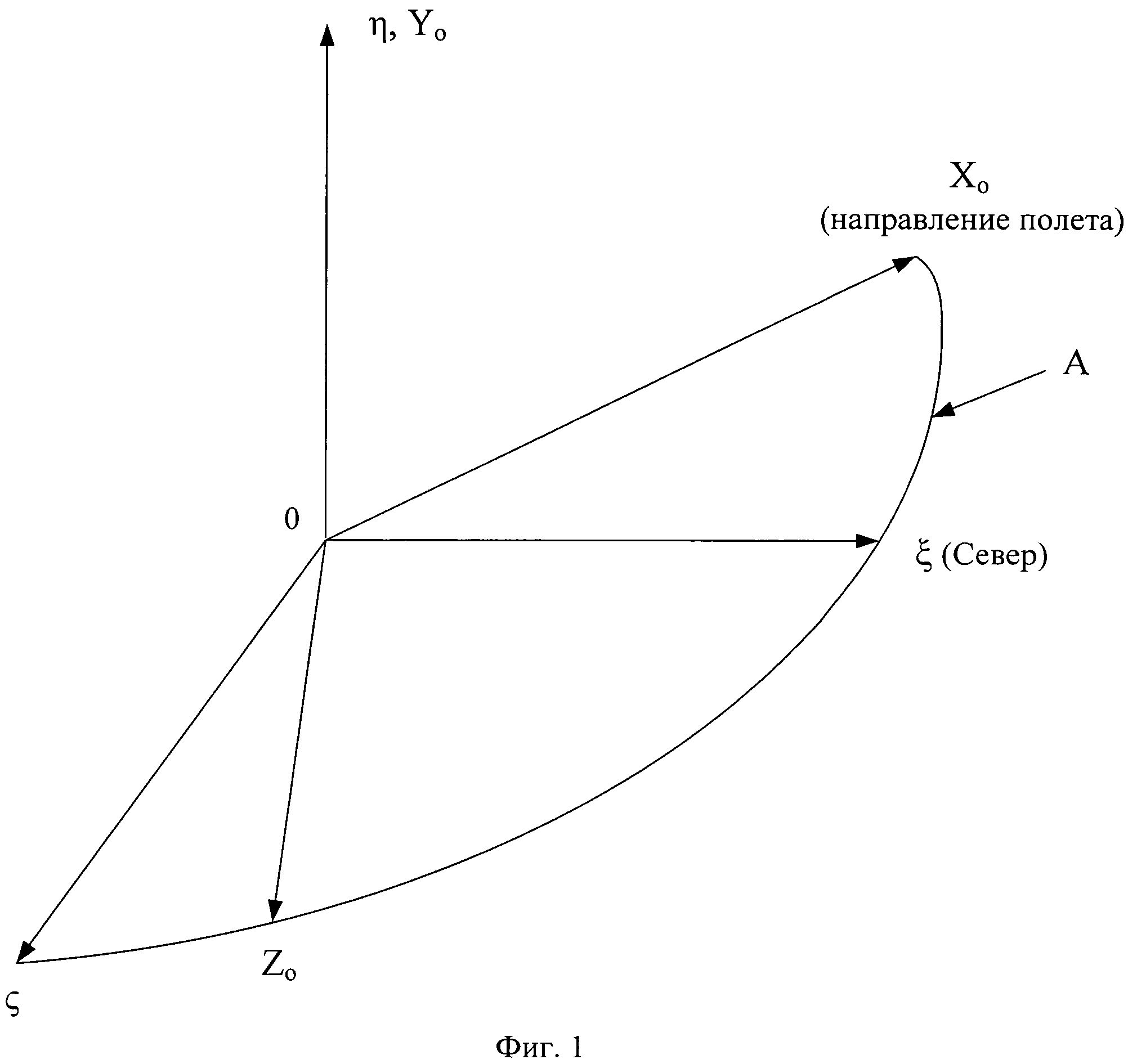
Способ формирования сигнала управления угловым движением беспилотного летательного аппарата при широком спектре возмущающих воздействий и система управления для его осуществления
Способ парирования перегрузок по току в электронном блоке космического аппарата, обусловленных внешними воздействующими факторами, включая тиристорный эффект, и устройство для его осуществления
Способ формирования сигнала угловой стабилизации по крену летательного аппарата с оценкой и компенсацией внешнего возмущения и устройство для его осуществления
Способ формирования нелинейного адаптивного цифроаналогового сигнала стабилизации углового положения беспилотного летательного аппарата и система стабилизации для его осуществления
Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата
Способ управления пространственной ориентацией космического аппарата и система управления для его реализации
Радиоэлектронный блок
Устройство отвода тепла
Матричное устройство выдачи команд с оптической развязкой
Способ формирования сигнала управления боковым движением нестационарного беспилотного летательного аппарата с адаптивно-функциональной коррекцией и устройство для его осуществления
Способ формирования сигнала управления угловым движением беспилотного летательного аппарата при широком спектре возмущающих воздействий и система управления для его осуществления
Способ парирования перегрузок по току в электронном блоке космического аппарата, обусловленных внешними воздействующими факторами, включая тиристорный эффект, и устройство для его осуществления
Способ формирования сигнала угловой стабилизации по крену летательного аппарата с оценкой и компенсацией внешнего возмущения и устройство для его осуществления
Способ формирования нелинейного адаптивного цифроаналогового сигнала стабилизации углового положения беспилотного летательного аппарата и система стабилизации для его осуществления
Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата
Способ управления пространственной ориентацией космического аппарата и система управления для его реализации
Радиоэлектронный блок
Устройство отвода тепла
Матричное устройство выдачи команд с оптической развязкой
Способ формирования сигнала управления боковым движением нестационарного беспилотного летательного аппарата с адаптивно-функциональной коррекцией и устройство для его осуществления

