Результат интеллектуальной деятельности: СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Предлагаемые способ наведения управляемой ракеты и система наведения для его реализации относятся к области разработки систем управления ракетами и могут быть использованы в противотанковых ракетных комплексах (ПТРК).
Известен способ управления ракетой [Патент РФ №2103713 от 27.01.1998 г. МКИ 6 G05В 11/01, G01S 13/68 (аналог)] [1], заключающийся в том, что выделяют координаты цели и ракеты, определяют величину ошибки, пропорциональную разности между входной координатой цели и координатой ракеты, формируют команды управления ракетой в соответствии с величиной ошибки.
Система управления для осуществления указанного способа содержит последовательно соединенные приемные устройства цели и ракеты, устройство выработки команд управления, устройство телеуправления, систему управления нормальными перегрузками.
Приемные устройства включают пеленгатор, блок управления, исполнительный привод, датчик угла поворота, платформу и являются пеленгаторами с ограниченным полем зрения, предназначенными для определения координат цели и ракеты и выполнены по известной схеме [1].
Недостатками указанных технических решений являются сложность и большие массогабаритные характеристики конструкции, а также высокая стоимость ее реализации.
Наиболее близким к предлагаемому является способ наведения противотанковой ракеты, приведенный в описании патента [Патент РФ 2258887 от 20.08.2005. МКИ 7 F41G 7/00 (прототип)] [2], включающий запуск управляемой ракеты с бортовым источником излучения, прием светового потока от бортового источника излучения управляемой ракеты фотоприемником матричного типа, определение засвеченного бортовым источником излучения пространства и координат его центра относительно центральной ячейки фотоприемника матричного типа, определение координат управляемой ракеты и формирование команд управления относительно линии визирования цели, при этом в процессе наведения наводчик осуществляет удержание цели в центре поля зрения фотоприемника ракеты, а выделение координат управляемой ракеты осуществляется по формируемой последовательности видеокадров фоноцелевой обстановки вместе с бортовым источником излучения.
Наиболее близкой к предлагаемой является система наведения для осуществления указанного способа [2], выбранная в качестве прототипа и содержащая последовательно соединенные объектив, фотоприемник (образующие телевизионную систему), блок выделения засвеченного пространства, блок расчета центра засвеченного пространства относительно центральной ячейки фотоприемника матричного типа, блок выделения координат и блок формирования команд.
Недостатком указанных технических решений является низкая точность, определяемая характером движения цели.
Современные условия применения противотанковых ракет потребовали создать такой способ наведения управляемой ракеты и систему наведения для его реализации, которые позволили бы преодолеть ряд технических трудностей. Например, точность системы наведения определяется характером движения цели и в значительной степени способностью наводчика удержать ее в центре поля зрения фотоприемника ракеты.
Задачей предлагаемого изобретения является разработка такого способа наведения управляемой ракеты и системы наведения для его реализации, которые позволили бы повысить качество процесса наведения управляемой ракеты без изменения конструкции самой ракеты, осуществлять формирование команд управления ракетой по координатам ракеты относительно цели и, как следствие, повысить точность всей системы управления при сложном и высокоскоростном характере движения цели.
Поставленная задача решается тем, что в способе наведения управляемой ракеты, включающем запуск управляемой ракеты с бортовым источником излучения, прием светового потока от бортового источника излучения управляемой ракеты телевизионной системой, формирование последовательности видеокадров фоноцелевой обстановки вместе с изображением бортового источника излучения и целью, определение засвеченного бортовым источником излучения пространства и координат его центра, определение координат управляемой ракеты и формирование команд управления, на каждом кадре в пределах поля зрения фотоприемника ракеты по дополнительно формируемой последовательности видеокадров или по текущей последовательности видеокадров определяют область пространства изображения цели, вычисляют координаты центра выделенной области цели, формируют координаты ракеты относительно координат цели, а формирование команд управления осуществляют по координатам ракеты относительно координат цели.
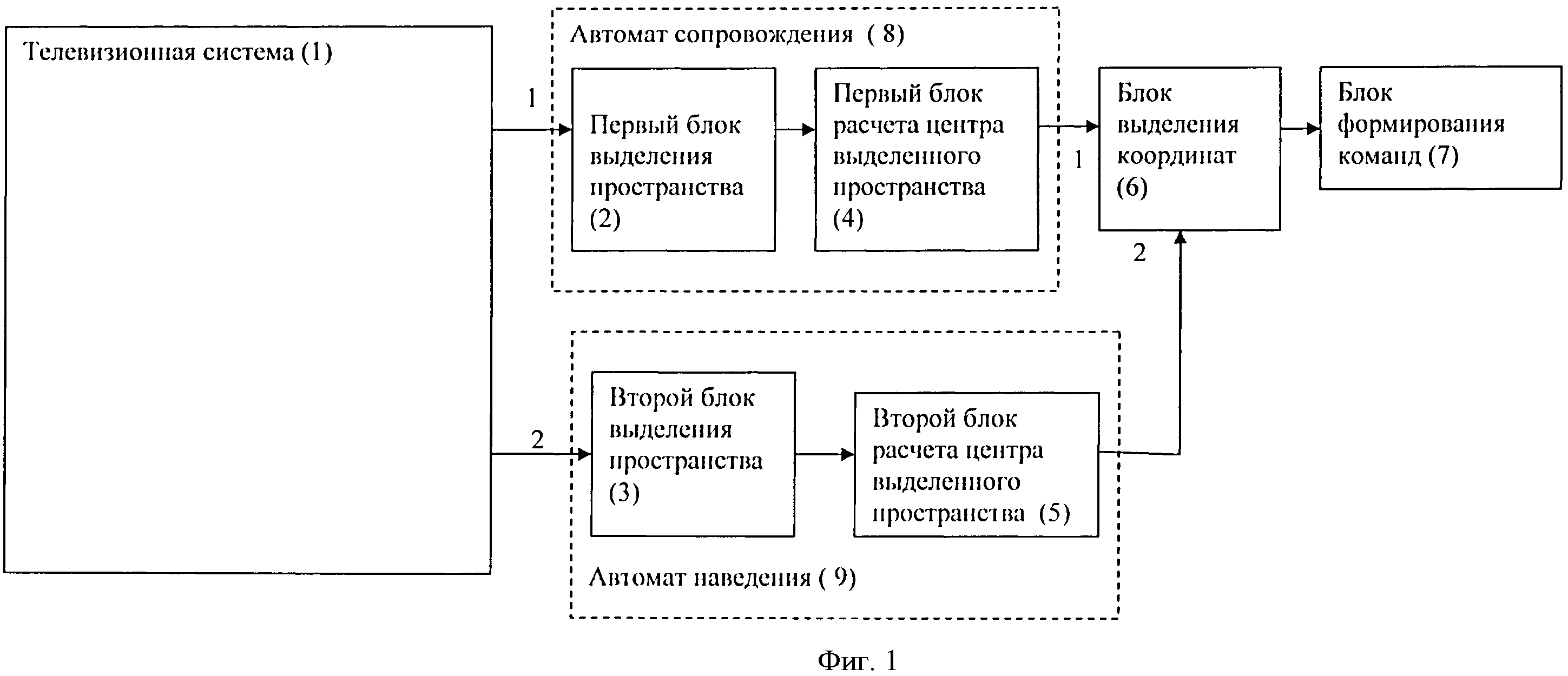
Поставленная задача решается также тем, что система наведения управляемой ракеты, содержащая последовательно соединенные телевизионную систему, первый блок выделения пространства, первый блок расчета центра выделенного пространства, блок выделения координат и блок формирования команд, снабжена последовательно соединенным вторым блоком выделения пространства, вход которого соединен со вторым выходом телевизионной системы, и вторым блоком расчета центра выделенного пространства, выход которого соединен со вторым входом блока выделения координат.
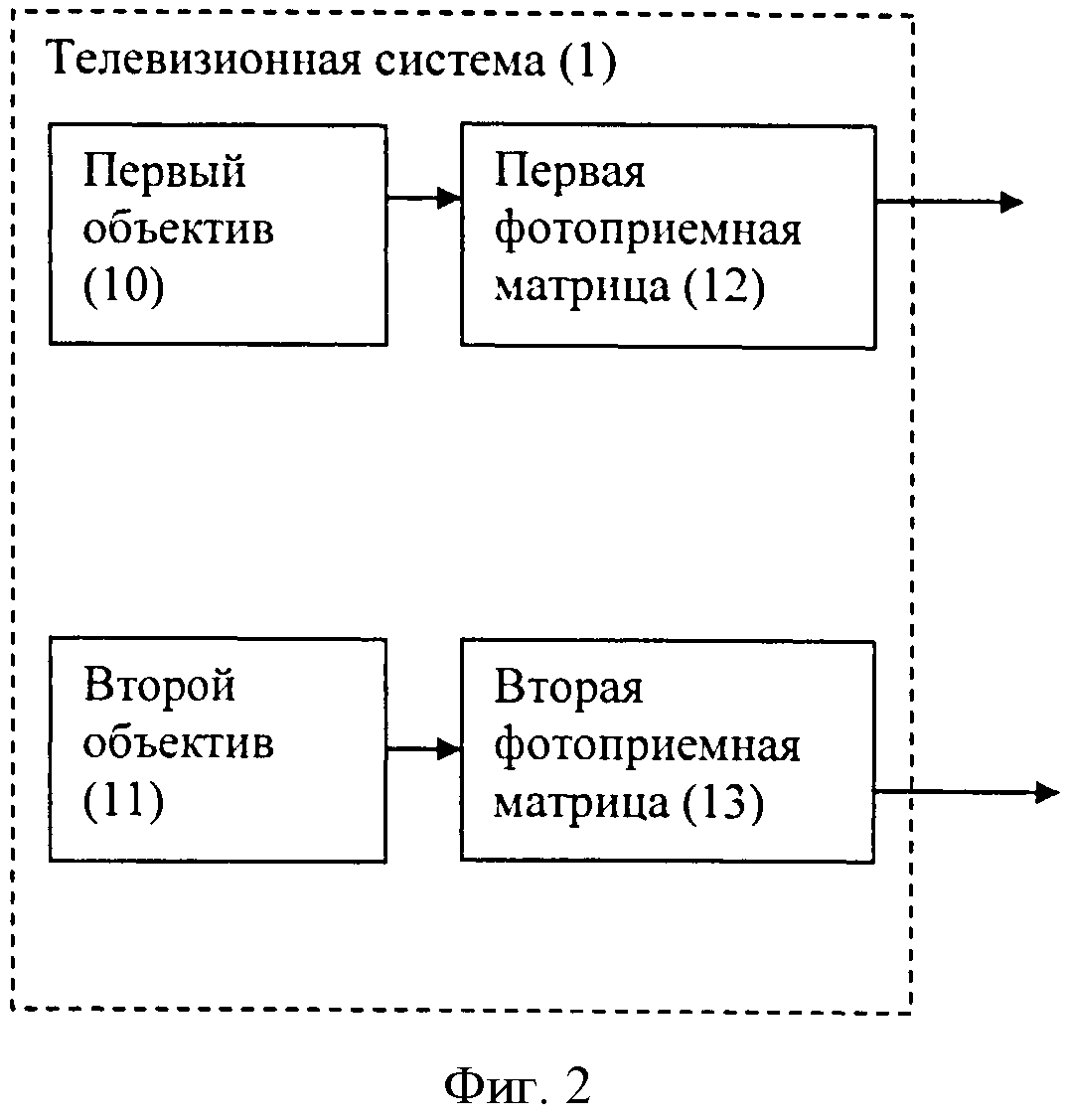
В предлагаемой системе наведения управляемой ракеты телевизионная система содержит первый и второй объективы, а также первый и второй фотоприемники матричного типа, на вход которых поступают световые потоки соответственно от первого и второго объективов, а выходы фотоприемных матриц являются первым и вторым выходами телевизионной системы.
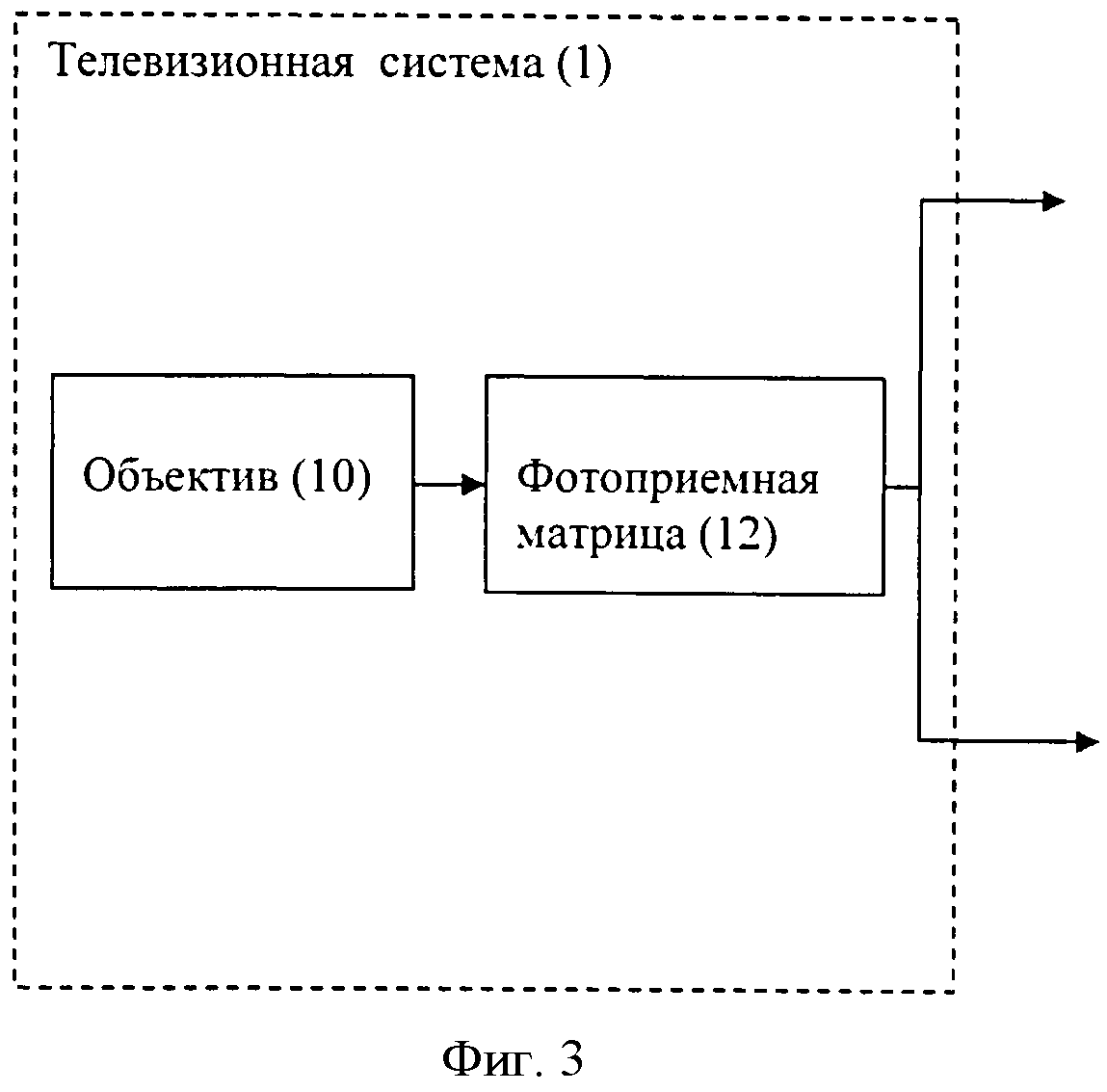
В предлагаемой системе наведения управляемой ракеты телевизионная система содержит объектив и фотоприемник матричного типа, на вход которого поступает световой поток от объектива, а выход фотоприемной матрицы является первым и вторым выходами телевизионной системы.
Сущность способа заключается в следующем. После пуска ракеты излучение фоноцелевой обстановки совместно с излучением бортового источника излучения управляемой ракеты попадает на входной зрачок объектива и фокусируется на чувствительных ячейках фотоприемника матричного типа, который формирует последовательность видеокадров с изображением фоноцелевой обстановки и бортового источника излучения управляемой ракеты. При формировании кадра видеоизображения с каждой чувствительной ячейки фотоприемника матричного типа снимается сигнал, уровень которого пропорционален энергии падающего на него излучения. Так как уровень сигнала от бортового источника излучения управляемой ракеты находится в известном диапазоне и превосходит сигнал фона, на фотоприемнике матричного типа образуется изображение бортового источника излучения в уровень с ожидаемым уровнем сигнала на чувствительных ячейках. При опросе пространства фотоприемника матричного типа, засвеченного бортовым источником излучения, определяется центр засвеченного пространства, определяется номер чувствительной ячейки, являющейся центром засвеченного пространства бортовым источником излучения. Определяются координаты расположения центральной ячейки засвеченного пространства ракеты относительно центральной ячейки фотоприемника матричного типа. В пределах поля зрения фотоприемника ракеты по геометрическим соотношениям или значениям корреляционной функции определяется пространство цели и номер чувствительной ячейки, являющейся центром пространства изображения цели. Пространство изображения цели может быть определено как по текущей последовательности видеоизображений, так и по последовательности видеокадров, формируемых с помощью дополнительных объектива и фотоприемника матричного типа. Использование дополнительного видеоканала целесообразно при спектральном определении изображений ракеты и цели, но требует тарировки и юстировки. Определяются координаты центральной ячейки пространства цели относительно центральной ячейки фотоприемника матричного типа. Далее определяются координаты центральной ячейки засвеченного пространства ракеты относительно центральной ячейки пространства цели. После определения координат центральной ячейки засвеченного пространства ракеты относительно центральной ячейки пространства цели осуществляется расчет координат управляемой ракеты относительно координат цели и формируются команды управления ракеты относительно цели.
В заявляемых технических решениях предлагается обеспечить повышение качества процесса наведения управляемой ракеты без изменения конструкции самой ракеты, осуществлять управление ракетой по координатам ракеты относительно цели и, как следствие, повысить точность всей системы управления за счет чета характера движения цели в командах управления ракетой и практически исключить наводчика из процесса наведения ракеты.
Функциональная схема системы наведения управляемой ракеты приведена на фиг.1 - фиг.3.
Система наведения управляемой ракеты работает следующим образом. Входным воздействием для нее является угловое отклонение ракеты относительно линии визирования цели. Источник излучения ракеты обеспечивает наличие потока излучения в течение всего полетного времени управляемой ракеты. Объектив 10 фокусирует изображение источника излучения непосредственно на фотоприемнике матричного типа 12, который установлен в фокальной плоскости объектива 10, причем его центральная чувствительная ячейка находится на оптической оси объектива 10. Объектив 10 и фотоприемник 12 образуют телевизионную систему 1. Световой поток от источника излучения обеспечивает засветку определенной области фотоприемника матричного типа. Определение местоположения изображения бортового источника в данной области возложено на блок выделения засвеченного пространства 2, который не только определяет размеры области засветки фотоприемника источником излучения, но и дает информацию о количестве и координатах засвеченных чувствительных ячеек, а также об их уровнях сигналов. Данная информация поступает в блок расчета центра засвеченного пространства 4, который обеспечивает обработку сигналов непосредственно с тех чувствительных ячеек, которые были засвечены источником излучения. Блоки 2 и 4 образуют автомат сопровождения 8. Выходной сигнал с блока расчета центра засвеченного пространства 4 содержит информацию о линейных отклонениях источника излучения относительно линии прицеливания, которая поступает в блок выделения координат 6. Блок выделения пространства цели 3 определяет местоположение изображения цели по информации с чувствительных ячеек фотоприемника матричного типа 12, формирует информацию о количестве и координатах ячеек, входящих в область цели, и передает эту информацию в блок расчета центра выделенного пространства 5. Блоки 3 и 5 образуют автомат наведения 9. Возможен также вариант дополнительной реализации в телевизионной системе 1 второго объектива 11, фокусирующего фоноцелевую обстановку на втором фотоприемнике матричного типа 13, который установлен в фокальной плоскости объектива 11, причем его центральная чувствительная ячейка находится на оптической оси объектива 11 фотоприемника матричного типа 13. В этом случае блок выделения пространства цели 3 определяет местоположение изображения цели по информации с чувствительных ячеек фотоприемника матричного типа 13. Выходной сигнал с блока расчета центра выделенного пространства 5 содержит информацию о линейных отклонениях цели относительно линии прицеливания, которая поступает также в блок выделения координат 6. После преобразования блок выделения координат 6 вырабатывает сигналы, соответствующие линейным отклонениям управляемой ракеты относительно цели. Сигналы, пропорциональные отклонению управляемой ракеты относительно цели по курсу и тангажу, с выхода блока выделения координат поступают на блок формирования команд 7, где преобразуются в команды управления ракетой, предназначенные для передачи по линии связи на управляемую ракету.
В предлагаемой системе наведения управляемой ракеты объективы 10, 11, фотоприемники матричного типа 12, 13, блоки выделения пространства 2, 3, блоки расчета центра выделенного пространства 4, 5, блок выделения координат 6, блок формирования команд 7 могут быть выполнены как в прототипе. Фотоприемник матричного типа может быть выполнен на основе высокочастотной ПЗС-матрицы [3]. Блок выделения засвеченного пространства, блок расчета центра выделенного пространства, блок выделения координат, блок формирования команд могут быть выполнены на основе сигнальных микропроцессоров [4] и программируемых логических интегральных схем [5].
Обосновать работу системы наведения можно следующим образом.
Блок выделения засвеченного пространства 2 определяет область засветки. Критерием оценки является соотношение:

где U8ij - входной сигнал с ячейки фотоприемника матричного типа 12; i - номер строки, j - номер столбца: UpОП - опорный сигнал, определяющий допустимую величину уровня восприятия сигнала фотоприемником матричного типа 12; обусловленный энергетикой бортового источника излучения управляемой ракеты: Upe - уровень сигнала, определяемый внутренними шумами и дискретностью фотоприемника матричного типа 12.
В блоке выделения засвеченного пространства 2 определяют количество Мр, координаты npyi, npzi ячеек фотоприемника матричного типа 12, попавших в область засветки, а также их уровни выходных сигналов spi.
В блоке расчета центра засвеченного пространства 4 осуществляется определение координат геометрического центра засвеченного пространства, также определяется центральная ячейка засвеченного бортовым источником излучения пространства относительно центральной ячейки фотоприемника матричного типа 12:
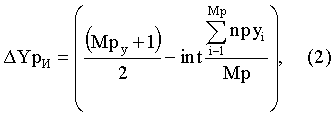
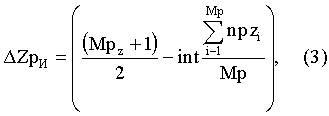
где Мрy, Мрz - максимальное количество ячеек по вертикали и горизонтали в фотоприемнике матричного типа 12.
В блоке расчета центра засвеченного пространства 4 может также осуществляться определение координат энергетического центра засвеченного пространства, определение центральной ячейки засвеченного бортовым источником излучения пространства с учетом уровней выходных сигналов, а также определение смещения этой ячейки относительно центральной ячейки фотоприемника матричного типа 12:
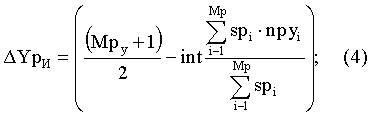
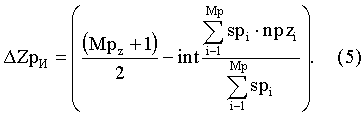
Использование зависимостей (4), (5) целесообразно, как правило, на участке управления, когда область засвеченного пространства от бортового источника излучения имеет значительные размеры.
Для случая реализации телевизионной системы 1 с помощью объектива 10, 11 и фотоприемной матрицы 12, 13 для оценки области изображения цели имеем следующее.
В блоке выделения пространства 3 определяют количество Мс, координаты ncyi, nczi ячеек фотоприемника матричного типа 13, попавших в область цели, а также их уровни выходных сигналов sci. В качестве критериев для выделения области цели могут быть использованы геометрические пропорции цели или расчетные значения корреляционных функций [6].
Текущий кадр разбивают на блоки одинакового размера, и для каждого блока вычисляют наилучшее соответствие в предыдущем кадре. В качестве меры соответствия используют значение взаимно корреляционной функции или суммы модулей разности яркостей пикселей в пределах блока:

где L(x,y,k) - яркости элементов с координатами х и y в кадре с номером k: m, n - число пикселей в блоке.
В блоке расчета центра засвеченного пространства 5 осуществляется определение координат геометрического центра пространства, также определяется центральная ячейка пространства цели относительно центральной ячейки фотоприемника матричного типа 13:
где McY, McZ - максимальное количество ячеек по вертикали и горизонтали в фотоприемнике матричного типа 13.
В блоке расчета центра засвеченного пространства 4 может также осуществляться определение координат энергетического центра пространства цели, определение центральной ячейки пространства цели с учетом уровней выходных сигналов, а также определение смещения этой ячейки относительно центральной ячейки фотоприемника матричного типа 13:
Использование зависимостей (7), (8) целесообразно, как правило, на участке, когда область пространства цели имеет значительные размеры.
Для случая реализации телевизионной системы 1 с помощью объектива 8 и фотоприемной матрицы 12 в зависимостях (7), (8) или (9), (10) вместо данных с ячеек фотоприемной матрицы 13 используются данные с ячеек фотоприемной матрицы 12. При этом McY=MpY, McZ=Mpz.
При реализации телевизионной системы 1 с помощью объектива 10, 11 и фотоприемной матрицы 12, 13 линейные координаты бортового источника излучения относительно цели определяются из (2), (3) или (4), (5) и из (7), (8) или (9), (10):


где fc/ - фокусное расстояние объектива 9; δcf - размер ячейки фотоприемника матричного типа 13.
При реализации телевизионной системы 1 с помощью объектива 10 и фотоприемной матрицы 12 линейные координаты бортового источника излучения относительно цели определяются из (2), (3) или (4), (5) и из (7), (8) или (9), (10):


Анализ формул (1)-(14) показывает, что повышается качество процесса наведения управляемой ракеты без изменения конструкции самой ракеты и, как следствие, повышается точность всей системы управления при сложном и высокоскоростном характере движения цели за счет формирования команд управления ракетой с учетом координат цели. При этом поиск изображения цели и расчет ее координат может осуществляться на каждом кадре в пределах поля зрения фотоприемника ракеты как по дополнительно формируемой, так и по текущей последовательности видеокадров.
Таким образом, предлагаемый способ наведения управляемой ракеты и система наведения для его реализации обеспечивают повышение качества процесса наведения управляемой ракеты без изменения конструкции самой ракеты и, как следствие, повышение точности всей системы управления за счет формирования команд управления ракеты с учетом характера движения цели и практически исключить наводчика из процесса наведения ракеты.
Следовательно, использование новых элементов, соединенных в последовательности в соответствии с фигурой 1-3 с указанными динамическими характеристиками, определенными соотношениями (1)…(14), в предлагаемом способе наведения управляемой ракеты и системе наведения для его реализации выгодно отличает предлагаемое техническое решение от прототипа, так как обеспечивает повышение точности всей системы управления.
Источники информации
1. Способ управления и система управления для его осуществления. Понятский В.М., Ткаченко Ю.Н., Шипунов А.Г. (Россия). Патент N 2103713 от 27.01.1998 г Россия. МКИ6 G05B 11/01, G01S 13/68.
2. Способ наведения управляемой ракеты и система наведения для его реализации. Шипунов А.Г., Степаничев И.В., Погорельский С.Л., Галантэ А.И., Пальцев М.В., Понятский В.М., Чинарев А.В., Карамов С.В., Тикменов В.Н. (Россия) Патент 2258887 от 26.08.2005. МКИ 7, F41G 7/00 (прототип).
3. Приборы с зарядовой связью/ Под ред. М. Хоувза и Д. Моргана: Пер. с англ. - М.: Энергоиздат. 1981. - 376 с.
4. Руководство пользователя по сигнальным микропроцессорам ADSP-2100/ Пер. с англ. О.В.Луневой: Под ред. А.Д.Викторова: Санкт-Петербургский государственный электротехнический университет. - Санкт-Петербург. 1997. - 520 с.
5. В.Б. Стешенко. ПЛИС фирмы «ALTERA»: Проектирование устройств обработки сигналов./М.: «Додека», 2000 г.
6. Лукьяница А.А., Шишкин А.Г. Цифровая обработка видеоизображений. - М.: «Ай-Эс-Эс». 2009. - с. 63-111.
Объектив для ближней ик-области спектра
Способ контроля параметров прицела системы телеориентирования с излучающими каналами на инжекционных лазерах на краю поля управления летательным аппаратом и устройство для его реализации
Способ управления беспилотным летательным аппаратом и блок рулевых приводов для его осуществления
Объектив для ближней ик-области спектра
Способ контроля параметров прицела системы телеориентирования с излучающими каналами на инжекционных лазерах на краю поля управления летательным аппаратом и устройство для его реализации
Способ управления беспилотным летательным аппаратом и блок рулевых приводов для его осуществления
Оптический прицел системы управления огнем
Управляемый снаряд, блок рулевого привода управляемого снаряда, пневмораспределительное устройство рулевого привода управляемого снаряда, механизм инициирования рулевого привода управляемого снаряда
Боевая машина
Артиллерийский патрон
Способ контроля герметичности автопилотного блока управляемых артиллерийских снарядов и устройство для его осуществления
Управляемый снаряд
Управляемая ракета в транспортно-пусковом контейнере

