Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ ПО КУРСУ ПРИ ПОСАДКЕ
Вид РИД
Изобретение
Изобретение относится к области авиастроения, в частности к системам управления самолетом по курсу на этапе послепосадочного пробега, когда управление обеспечивается при помощи руля направления и носового колеса.
Управление самолетом по курсу на пробеге при посадке реализуется посредством поворота руля направления и/или носового колеса при отработке их исполнительными механизмами управляющих сигналов, поступающих с управляющего органа руля направления, который традиционно выполняется в виде двуплечей педали либо педального узла. содержащего две педали противоположного хода. Управляющий орган руля направления, который характеризуется тем, что смещение одного плеча двуплечей педали (одной педали педального узла) в одну сторону вызывает такое же смещение другого плеча двуплечей педали (другой педали педального узла) в другую сторону, далее по тексту будет именоваться как «Педаль РН». Воздействие на Педаль РН может быть произведено непосредственно пилотом либо исполнительным механизмом, отрабатывающим сигналы системы автоматического управления самолета (САУ).
Как правило, управление самолета по курсу при посадке осуществляется по следующей схеме. Во время приближения самолета к взлетно-посадочной полосе (ВПП) на фазе полета, а также во время пробега на заднем шасси, управляющие сигналы с Педали РН поступают только на руль направления, носовое же колесо при этом занимает нейтральное положение и находится в режиме свободного ориентирования, т.е. не управляется. Однако при переносе веса самолета на носовое колесо и замыкании соответствующего реле, что в дальнейшем именуется как «обжатие стойки носового колеса», Педалью РН управляется как руль направления, так и носовое колесо. При снижении скорости самолета ниже заданного порогового значения управляющие сигналы с Педали РН могут передаваться только на носовое колесо.
В патентной публикации US 3753540 A, B64C 25/50, 21.08.1973 раскрыта система управления носовым колесом самолета, в котором носовое колесо управляется Педалью РН. Педаль РН имеет механическую связь с гидравлическим исполнительным механизмом носового колеса, которая замыкается при обжатии стойки носового колеса, причем до появления указанного условия носовое колесо находится в режиме свободного ориентирования, и самолет управляется по курсу только рулем направления. Угол поворота носового колеса зависит от скорости самолета, но каждому положению Педали РН на каждой скорости самолета соответствует только одно возможное положение руля направления и носового колеса.
Из патентной публикации US 8473159 B2, G06F 19/00, 25.06.2013 известен способ управления носовым колесом самолета, в котором условием передачи управляющих сигналов от Педали РН к исполнительному механизму носового колеса является не только обжатие стойки носового колеса, но и снижение скорости самолета до некоторого заданного значения. До возникновения указанного условия самолет управляется по курсу только рулем направления, а носовое колесо остается в режиме свободного ориентирования. Данное решение характеризуется тем, что управляющие сигналы от Педали РН передаются по электрическим кабелям на компьютер, который, в свою очередь, транслирует их на гидравлический исполнительный механизм носового колеса. Угол поворота носового колеса здесь также зависит от скорости самолета, и аналогично предыдущему решению каждому положению Педали РН на каждой скорости самолета соответствует только одно возможное положение руля направления и носового колеса.
Однако известные технические решения, каждое из которых может служить прототипом изобретения, имеют существенный недостаток. В случае возникновения продолжительного бокового воздействия при подлете к ВПП или послепосадочном пробеге самолета в момент, когда носовое колесо находится в режиме свободного ориентирования, например - постоянного бокового ветра либо существенного снижения тяги на одном из двигателей, траектория самолета может несколько сместиться от оси ВПП. Выравнивание самолета по курсу в этом случае, как указывалось выше, осуществляется при помощи руля направления при соответствующем смещении Падали РН от ее нейтрального положения. Самолет восстанавливает траекторию по оси ВПП, при этом если для компенсации продолжающегося бокового воздействия руль направления остается повернутым относительно продольной оси самолета, а Педаль РН - смещенной, то при наступлении условий подключения исполнительного механизма носового колеса к Педали РН носовое колесо повернется в соответствии с текущим положением Педали РН. Данное обстоятельство может вызвать увод самолета в сторону от оси ВПП, что создаст дополнительные риски при выполнении послепосадочного пробега.
Задачей изобретения является повышение управляемости самолета по курсу при послепосадочном пробеге в условиях продолжительного бокового воздействия.
Для решения поставленной задачи предложена система управления самолетом по курсу на послепосадочном пробеге при помощи руля направления и носового колеса, содержащая управляющий орган, связанный с исполнительными механизмами руля направления и носового колеса и способный отклоняться вправо и влево от его нейтрального положения. Каждому отклонению управляющего органа от его нейтрального положения на каждой скорости самолета соответствуют однозначно определяемые отклонения руля направления и носового колеса от их нейтральных положений. При этом нейтральными положениями управляющего органа и носового колеса являются те их положения, которые они занимали в момент установления связи между управляющим органом и исполнительным механизмом носового колеса.
В частном случае изобретения связь между управляющим органом и исполнительным механизмом носового колеса устанавливается в момент обжатия стойки носового колеса.
В другом частном случае изобретения связь между управляющим органом и исполнительным механизмом носового колеса устанавливается при обжатой стойке носового колеса в момент падения скорости самолета до некоторого заданного значения.
В предпочтительном случае изобретения управляющий орган выполнен в виде двуплечей педали либо педального узла, содержащего две педали противоположного хода.
Осуществление изобретения будет пояснено ссылками на чертежи:
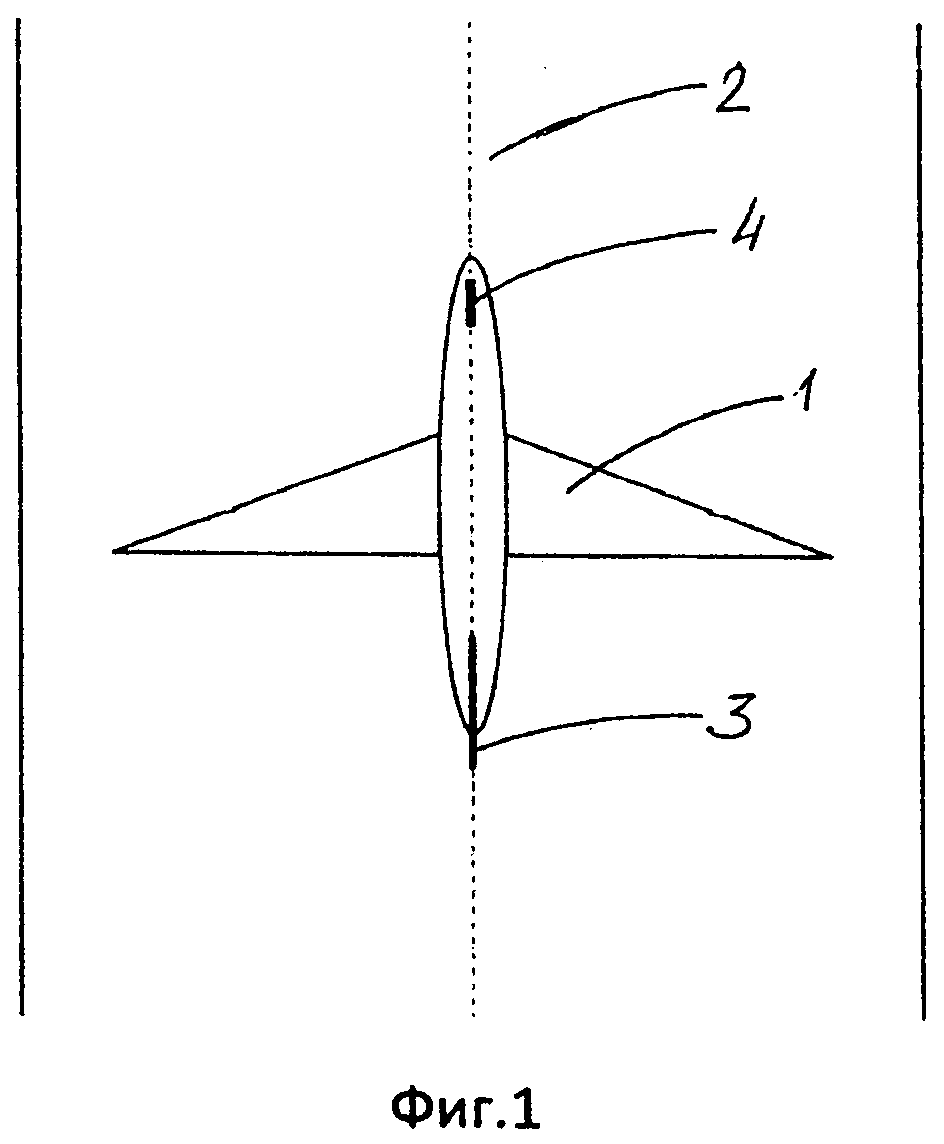
фиг.1 - изображение самолета на послепосадочном пробеге при выдержанном курсе в отсутствие бокового воздействия;
фиг.2 - изображение Педали РН для случая Фиг.1;
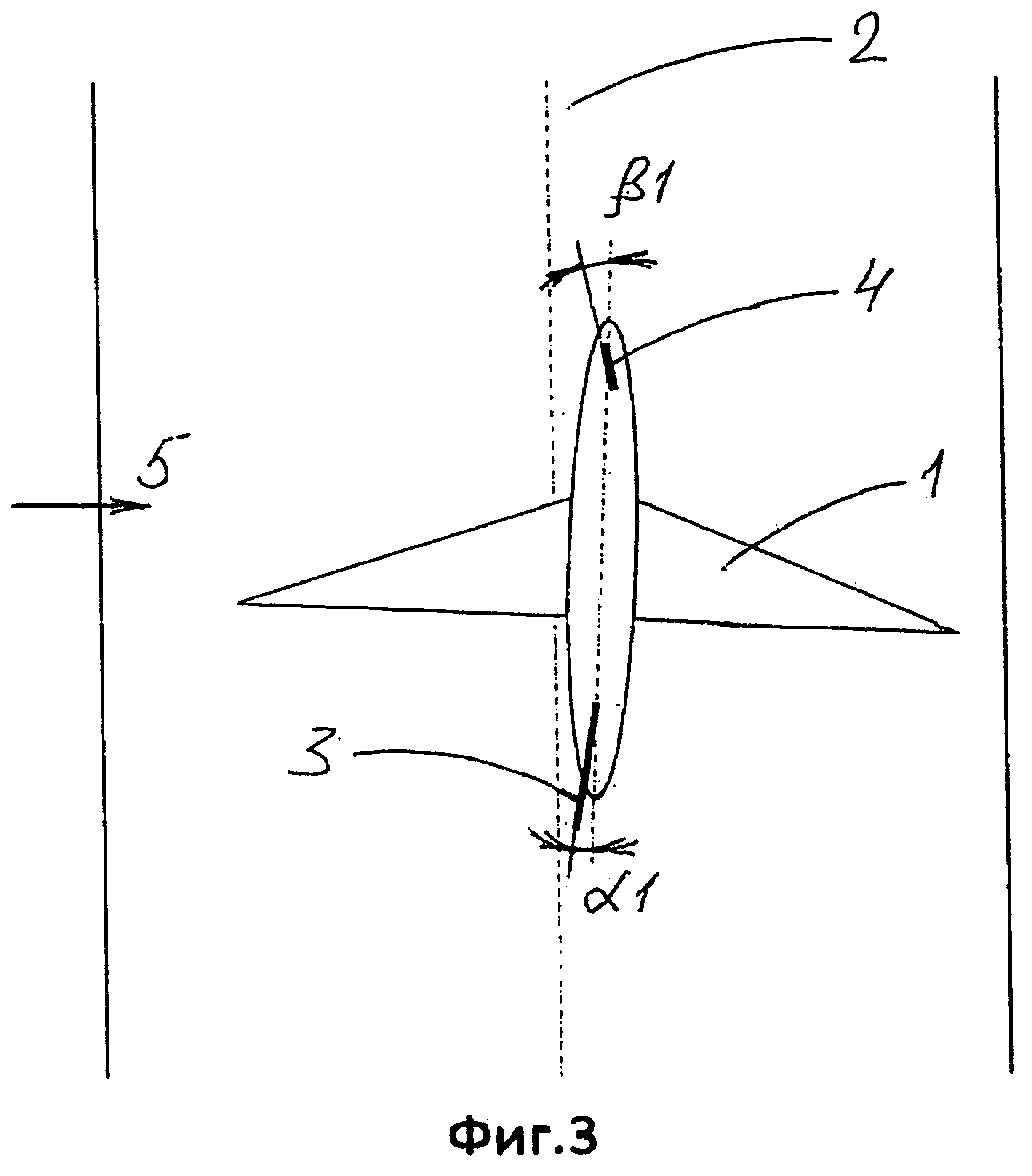
фиг.3 - изображение самолета на послепосадочном пробега при необходимости корректировки курса, возникшей после обжатия стойки носового колеса;
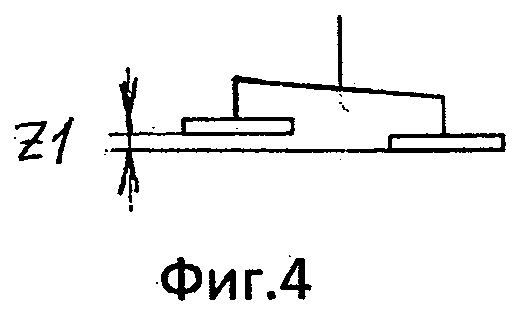
фиг.4 - изображение Педали РН для случая Фиг.3;
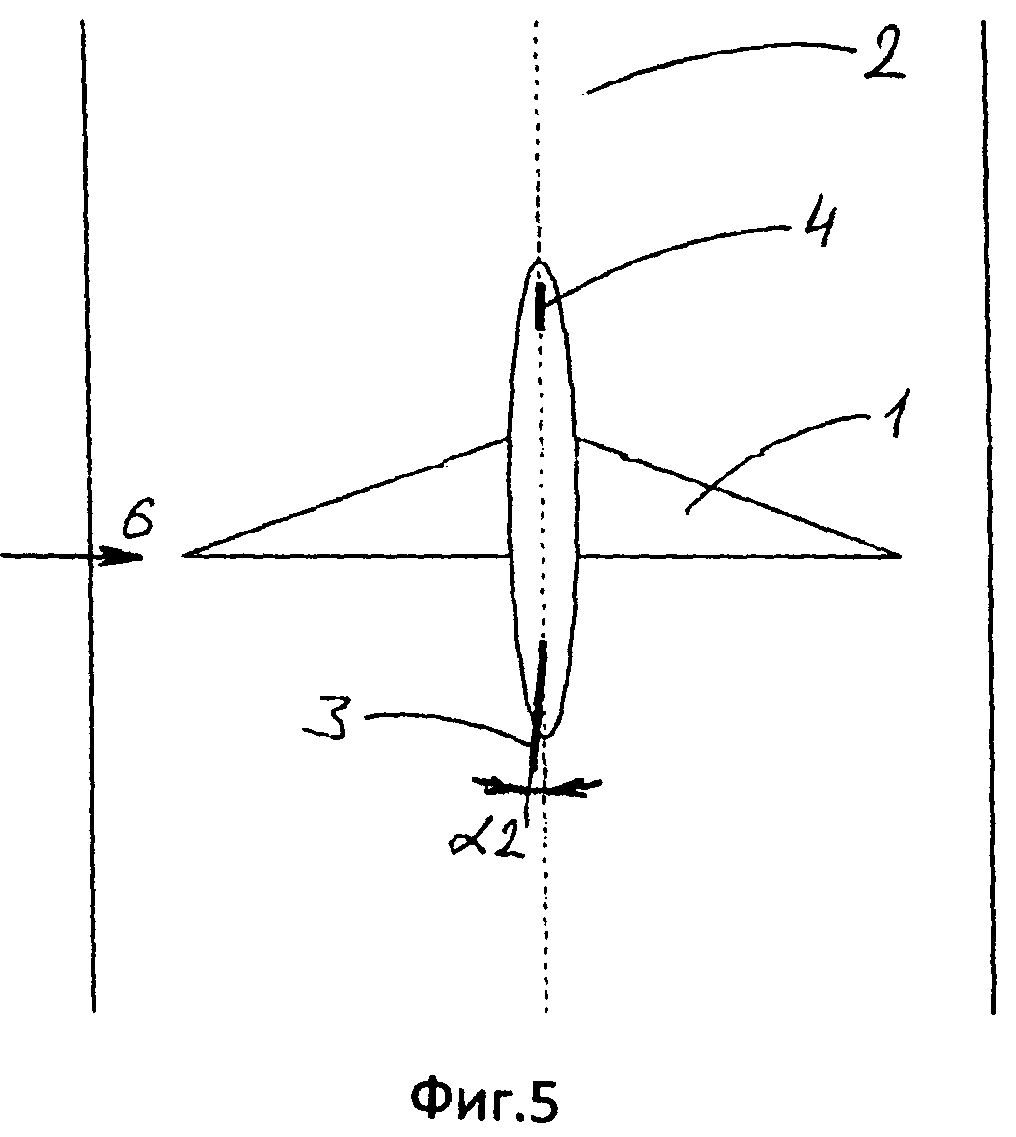
фиг.5 - изображение самолета, оснащенного системой согласно изобретению, на послепосадочном пробеге при выдержанном курсе в условиях продолжительного бокового воздействия;
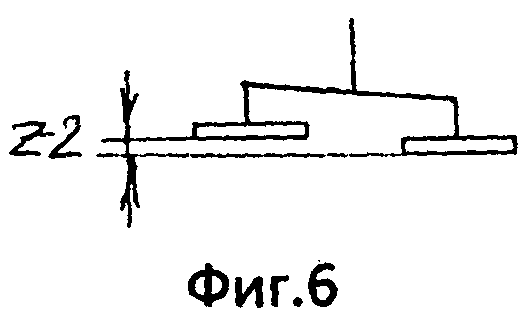
фиг.6 - изображение Педали РН для случая Фиг.5;
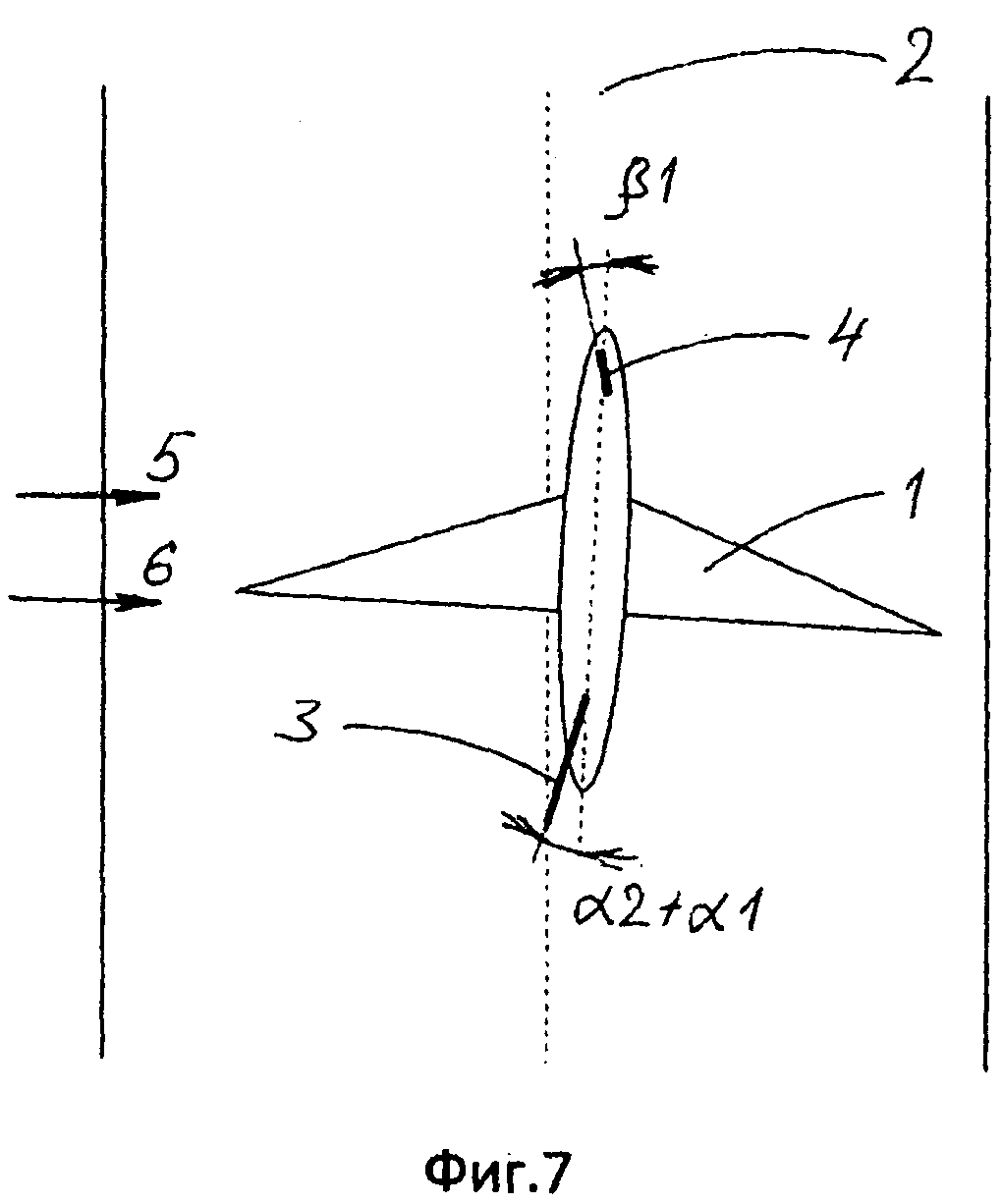
фиг.7 - изображение самолета, оснащенного системой согласно изобретению, на послепосадочном пробеге при необходимости корректировки курса в условиях продолжительного бокового воздействия;
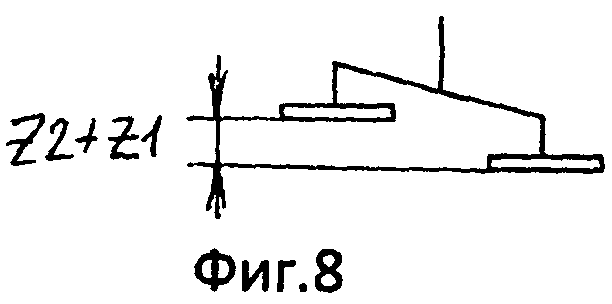
фиг.8 - изображение Педали РН для случая Фиг.7.
На фиг.1 показан самолет 1, выполняющий послепосадочный пробег по ВПП 2. Боковые воздействия на самолет отсутствуют, самолет выдерживает заданный курс вдоль оси ВПП. Руль направления 3, носовое колесо 4 и управляющий орган - Педаль РН (фиг.2) находятся в нейтральных положениях.
Следует отметить, что нейтральными положениями руля направления и носового колеса в прототипе являются их исходные положения, когда горизонтальные оси симметрии данных элементов параллельны оси самолета. Нейтральным положением Педали РН в прототипе также является ее исходное положение, при котором оба плеча двуплечей педали либо обе педали педального узла равноудалены от пилота. Таким образом, нейтральные положения Педали РН, руля направления и носового колеса в прототипе однозначно определены.
До обжатия стойки носового колеса (или наступления иного условия подключения к управлению исполнительного механизма носового колеса, что в контексте настоящего изобретения не является принципиальным и далее отдельно рассматриваться не будет) самолет управляется по курсу рулем направления по управляющим сигналам, поступающим от Педали РН. После обжатия стойки носового колеса на исполнительный механизм носового колеса начинают поступать управляющие сигналы от Педали РН. При этом каждому отклонению Педали РН от нейтрального положения на заданной скорости соответствует только одно возможное отклонение руля направления и носового колеса от их нейтральных положений. Поскольку нейтральные положения указанных элементов в прототипе однозначно определены, то каждому положению Педали РН на заданной скорости в прототипе соответствует только одно возможное положение руля направления и носового колеса.
На фиг.3 показан самолет 1, выполняющий послепосадочный пробег по ВПП 2 в отсутствие продолжительного бокового воздействия, однако в условиях внезапного бокового воздействия 5, например - порыва ветра, возникшего после обжатия стойки носового колеса и вызвавшего смещение самолета от оси ВПП.
Пилот или автоматика отклоняют Педаль РН от нейтрального положения (фиг.4) на величину z1, в результате чего исполнительный механизм руля направления поворачивает руль направления 3 на угол α1. Исполнительный механизм носового колеса получает от Педали РН соответствующий управляющий сигнал и поворачивает носовое колесо 4 на угол β1. После корректировки курса и выравнивания самолета по оси ВПП Педаль РН, а значит - и руль направления, и носовое колесо переводятся в нейтральное положение.
В описанных выше случаях (фиг.1 и фиг.3) как известная (далее - прототип), так и предложенная система управления самолетом на послепосадочном пробеге (далее - система согласно изобретению) работают одинаково.
На фиг.5 изображен самолет 1, выполняющий послепосадочный пробег по ВПП 2 в условиях продолжительного бокового воздействия 6, например, от ветра или отказа одного из двигателей. До обжатия стойки носового колеса было осуществлено выравнивание самолета по курсу вдоль оси ВПП путем поворота руля направления 3 на угол α2, для чего Педаль РН (фиг.6) была отклонена от исходного положения на величину z2.
Поскольку нейтральные положения Педали РН и носового колеса в прототипе совпадают с их исходными положениями, а отклонению Педали РН от нейтрального положения на величину z2 на данной скорости соответствует отклонение носового колеса на угол β2, то при обжатии стойки носового колеса на его исполнительный механизм будет подан соответствующий управляющий сигнал. Носовое колесо в прототипе повернется от нейтрального положения на угол β2 (не показано), что вызовет увод самолета от оси ВПП.
В системе согласно изобретению нейтральные положения Педали РН, а также носового колеса не являются заранее назначенными как в прототипе изобретения, а определяются как те положения, которые данные элементы занимали в момент установления связи между Педалью РН и исполнительным механизмом носового колеса. В рассматриваемом примере таким моментом является обжатие стойки носового колеса, однако, не исключается вариант изобретения, когда связь между Педалью РН и исполнительным механизмом носового колеса устанавливается при обжатой стойки носового колеса в момент падения скорости самолета до заданного значения. При этом в системе согласно изобретению так же, как и в прототипе, каждому отклонению Педали РН от ее нейтрального положения на каждой скорости самолета соответствуют однозначно определяемые отклонения руля направления и носового колеса от их нейтральных положений.
Таким образом, нейтральным положением Педали РН в системе согласно изобретению для случая фиг.5 является ее положение, изображенное на фиг.6, а нейтральным положением носового колеса 4 является положение, совпадающее с его исходным положением. Следует отметить, что в системе согласно изобретению так же, как в прототипе, остается однозначная связь между Педалью РН и рулем направления 3, а значит, положение руля направления с отклонением α2 от его исходного положения в случае фиг.5 будет являться нейтральным.
Как следует из фиг.5, самолет, оснащенный системой согласно изобретению, способен завершить послепосадочный пробег без увода с оси ВПП.
На фиг.7 показан самолет 1, выполняющий послепосадочный пробег по ВПП 2 в условиях продолжительного бокового воздействия 6, а также внезапного бокового воздействия 5, возникшего после обжатия стойки носового колеса и вызвавшего смещение самолета от оси ВПП. Для наглядности данного примера предположим, что внезапное боковое воздействие по своей силе аналогично таковому на фиг.3, а до возникновения внезапного бокового воздействия самолет находился в положении, показанном на фиг.5.
Для возврата на заданный курс Педаль РН, находящаяся в нейтральном положении, показанном на фиг.6, должна быть дополнительно отклонена на величину z1, что вызывает дополнительный поворот руля направления на угол α1. Несмотря на то Педаль РН оказывается отклоненной на величину (z2+z1), на исполнительный механизм носового колеса подается управляющий сигнал, в соответствии с которым носовое колесо поворачивается от своего нейтрального положения только на угол β1.
Таким образом, для случая фиг.7 отклонение Педали РН от исходного положения составит (z2+z1), угол поворота руля направления, имеющего однозначную связь с Педалью РН, от исходного положения составит (α2+α1), a угол поворота носового колеса от исходного положения составит β1. Такое положение органов управления самолета, обеспечиваемое системой согласно изобретению, позволяет произвести плавную корректировку курса. Следует, однако, отметить, что ограничения, накладываемые на максимальный уровень поворота руля направления и носового колеса для каждой скорости, остаются в силе. Важным обстоятельством является то, что к моменту возникновения внезапного бокового воздействия самолет, оснащенный известной системой управления - прототипом изобретения, находился бы в состоянии корректировки курса вследствие увода с оси ВПП, вызванного продолжительным боковым воздействием, а значит, его управление по курсу сопровождалось бы дополнительным риском.
Из изложенного выше следует, что в отличие от прототипа, в котором каждому положению Педали РН на каждой скорости самолета соответствует только одно возможное положение носового колеса, в системе согласно изобретению каждому положению Педали РН на каждой скорости самолета может соответствовать множество положений носового колеса. Поворот носового колеса относительно его исходного положения определяется исходя из нейтрального положения носового колеса и величины отклонения Педали РН от его нейтрального положения, в свою очередь, нейтральными положениями Педали РН и носового колеса, являются те положения, которые указанные элементы занимали в момент обжатия стойки носового колеса.
Рассмотренные выше примеры выполнения послепосадочного пробега в различных условиях позволяют сделать вывод о том, что система согласно изобретению обеспечивает повышение безопасности на послепосадочном пробеге как в автоматическом, так и в ручном режиме управления самолетом.
Способ изменения высоты полета летательного аппарата
Способ автоматического управления самолетом на посадке и система для его реализации
Способ управления самолетом при посадке
Способ получения белковой биомассы базидиального гриба pleurotus pulmonarius
Штамм candida albicans var. stellatoidea для получения диагностического аллергена
Способ измерения угловой скорости одноосным микромеханическим гироскопом и устройство для его реализации
Способ выделения линейно структурированной особенности поверхности
Способ изменения высоты полета летательного аппарата
Способ автоматического управления самолетом на посадке и система для его реализации
Способ управления самолетом при посадке
Способ получения белковой биомассы базидиального гриба pleurotus pulmonarius
Штамм candida albicans var. stellatoidea для получения диагностического аллергена
Способ получения белковой кормовой биомассы
Способ электрического стимулирования мяса птицы перед замораживанием

