БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА
Вид РИД
Изобретение
Область техники
Изобретение относится к области бесплатформенных инерциальных навигационных систем (БИНС), интегрированных как со спутниковой навигационной системой (СНС), так и с одометрической системой (ОД) для использования в мобильных наземных аппаратах различного типа.
Уровень техники
Использование БИНС с «грубыми» или средней точности чувствительными элементами (ЧЭ) описано в ряде патентов США корпорации American GNS, например, в ряде патентов о малогабаритных микромеханических инерциальных измерительных устройствах (патенты США №№6671648, 6522992, 6516283). Основное внимание в этих патентах уделено предоставлению преимуществ по сравнению с традиционными блоками ЧЭ на основании использования внешних датчиков навигационной информации (типа GPS).
Основным недостатком данных БИНС является невозможность длительного функционирования в автономном режиме при отключении СНС, что принципиально важно при постановке активных помех любого типа (GPS jamming).
В патенте США 5375059 (опубл. 20.12.1994) (патенты-аналоги США 5390125, 5438517) концептуально описана сложная интегрированная система точного определения положений аппарата на Земле или вблизи нее в реальном времени, в которой в интегрированном режиме в том числе задействованы СНС, БИНС, ОД с комбинированием их информации и ее цифровой обработкой с помощью фильтров Калмана.
Однако данная система является чрезмерно сложной, содержащей в себе множество дополнительных систем не столько навигации, сколько управления и исполнения движением аппарата по местности, в том числе с препятствиями. Интегрированная навигационная система описана только на концептуальном и функциональном уровнях без необходимых и достаточных подробностей взаимодействия ее составных частей.
С математическими подробностями мультисенсорная интегрированная навигационная система с применением измерений одометров, в частности, для матричных и интегральных математических формул фильтров Калмана, рассмотрена в книге Paul D. Groves «Principles of GNSS, Inertial and Multisensor Integrated Navigation Systems», Artech House, 2006, P. 441-443.
Основным ограничением такой системы является тот факт, что для «грубых» и среднеточных ЧЭ (дрейф гироскопов 0,5…2 град/ч) БИНС, она не сможет обеспечить точное счисление координат в автономном режиме при отключении СНС.
Главная задача изобретения - существенное повышение точности счисления скоростей и координат наземного объекта в автономном режиме при использовании «грубых» или среднеточных ЧЭ БИНС.
Раскрытие изобретения
Для достижения технического результата устройство бесплатформенной интегрированной навигационной системы средней точности для мобильного наземного объекта содержит:
блок ЧЭ, состоящий из трех акселерометров и трех датчиков угловой скорости по трем ортогональным осям,
блок пересчета ускорений из связанной в навигационную систему координат,
блок вычисления линейных и угловых скоростей и географических координат,
блок формирования сигналов демпфирования, первый и второй блоки кватернионных вычислений,
блок вычисления матрицы направляющих косинусов и углов ориентации системы, приемник сигналов СНС,
блок определения качества сигнала СНС,
коммутатор векторных сигналов,
первый и второй сумматоры-вычитатели векторных сигналов,
блок коррекции угла курса, а также дрейфа курсового (азимутального) гироскопа,
блок стоп-детектора,
блок одометрической системы.
Множество связей различных сигналов между блоками и переключения связей в разных маневрах объекта-носителя БИНС могут быть описаны по сути следующим образом.
Выходы сигналов линейных ускорений акселерометров блока ЧЭ поступают на первый вход блока пересчета ускорений из связанной в навигационную систему координат, а ко второму входу блока пересчета подключен первый выход сигналов матрицы направляющих косинусов блока вычислений матрицы направляющих косинусов и углов ориентации системы. Выходы угловых скоростей датчиков скоростей блока ЧЭ поступают на первый вход первого блока кватернионных вычислений, выход которого подключен к первому входу второго блока кватернионных вычислений, выход которого подключен к входу блока вычисления матрицы направляющих косинусов и углов ориентации и ко второму входу обратной связи первого блока кватернионных вычислений.
Выход сигналов ускорений из блока пересчета ускорений из связанной в навигационную систему координат подключен к первому входу блока вычисления линейных и угловых скоростей и географических координат.
Из приемника сигналов СНС поступают три сигнала, первый из которых - векторный сигнал линейной скорости объекта по данным СНС поступает на плюсовый вход первого сумматора-вычитателя, второй сигнал - сигнал качества связи с СНС поступает на вход блока определения качества сигнала СНС, выход которого соединен с управляющим входом коммутатора, а третий сигнал путевого угла объекта по данным СНС поступает на первый вход блока коррекции угла курса, а также дрейфа курсового гироскопа.
При этом второй вход указанного блока коррекции связан с выходом сигнала угла курса системы из блока вычисления матрицы направляющих косинусов и углов ориентации, а третий вход указанного блока коррекции соединен с выходом блока стоп-детектора, первый вход которого соединен с выходом сигнала ускорения из блока пересчета ускорений из связанной в навигационную систему координат, а на второй вход блока стоп-детектора поступают сигналы угловых скоростей из блока ЧЭ.
Векторный сигнал линейной скорости системы VИНС с третьего выхода блока вычисления линейных и угловых скоростей и географических координат поступает на входы вычитания первого и второго сумматоров-вычитателей, выходы которых соединены с соответствующими входами вышеуказанного коммутатора. На плюсовый вход второго сумматора-вычитателя поступает сигнал скорости из блока одометрической системы, на вход которого поступает выходной сигнал курса всей системы из блока вычисления матрицы направляющих косинусов и углов ориентации. Выход коммутатора соединен со входом блока формирования сигналов демпфирования и вторым входом блока вычисления линейных и угловых скоростей и географических координат, третий и четвертый входы которого соединены с соответствующими первым и вторым выходами блока коррекции угла курса, а также дрейфа курсового гироскопа.
Векторный сигнал абсолютной угловой скорости навигационного трехгранника с первого выхода блока вычисления линейных и угловых скоростей и географических координат поступает на второй вход второго блока кватернионных вычислений, на третий и четвертый входы которого поступают первый и второй корректирующие сигналы угловых скоростей соответственно со второго выхода (управляющий сигнал вертикальной угловой скорости) из блока вычисления линейных и угловых скоростей и географических координат и с выхода блока формирования сигналов демпфирования.
Третий и четвертый выходы блока вычисления линейных и угловых скоростей и географических координат являются соответственно выходами всей системы по линейной скорости (или ее составляющим) и географическим координатам объекта.
Второй, третий и четвертый выходы сигналов углов ориентации блока вычисления матрицы направляющих косинусов и углов ориентации являются соответствующими выходами системы по углам курса, тангажа и крена объекта.
Для существенного повышения точности счисления скоростей и координат наземного объекта в автономном режиме при использовании «грубых» или среднеточных ЧЭ БИНС предлагается, в первую очередь, периодическая калибровка (компенсация) дрейфа азимутального (курсового) гироскопа как с использованием СНС, так и в режиме остановок мобильного наземного объекта (по сигналу стоп-детектора). Кроме того, для сглаживания показаний скорости и, следовательно, более точного получения координат объекта осуществляют более качественное, «мягкое» демпфирование ошибок БИНС по показаниям одометрической системы в отсутствии сигналов СНС. Важно отметить, что в случае наличия удовлетворительного сигнала СНС система всегда находится в интегрированном режиме с СНС, и только при наличии отказа СНС система переходит в автономный режим счисления, используя сигнал одометрической системы.
Перечень чертежей
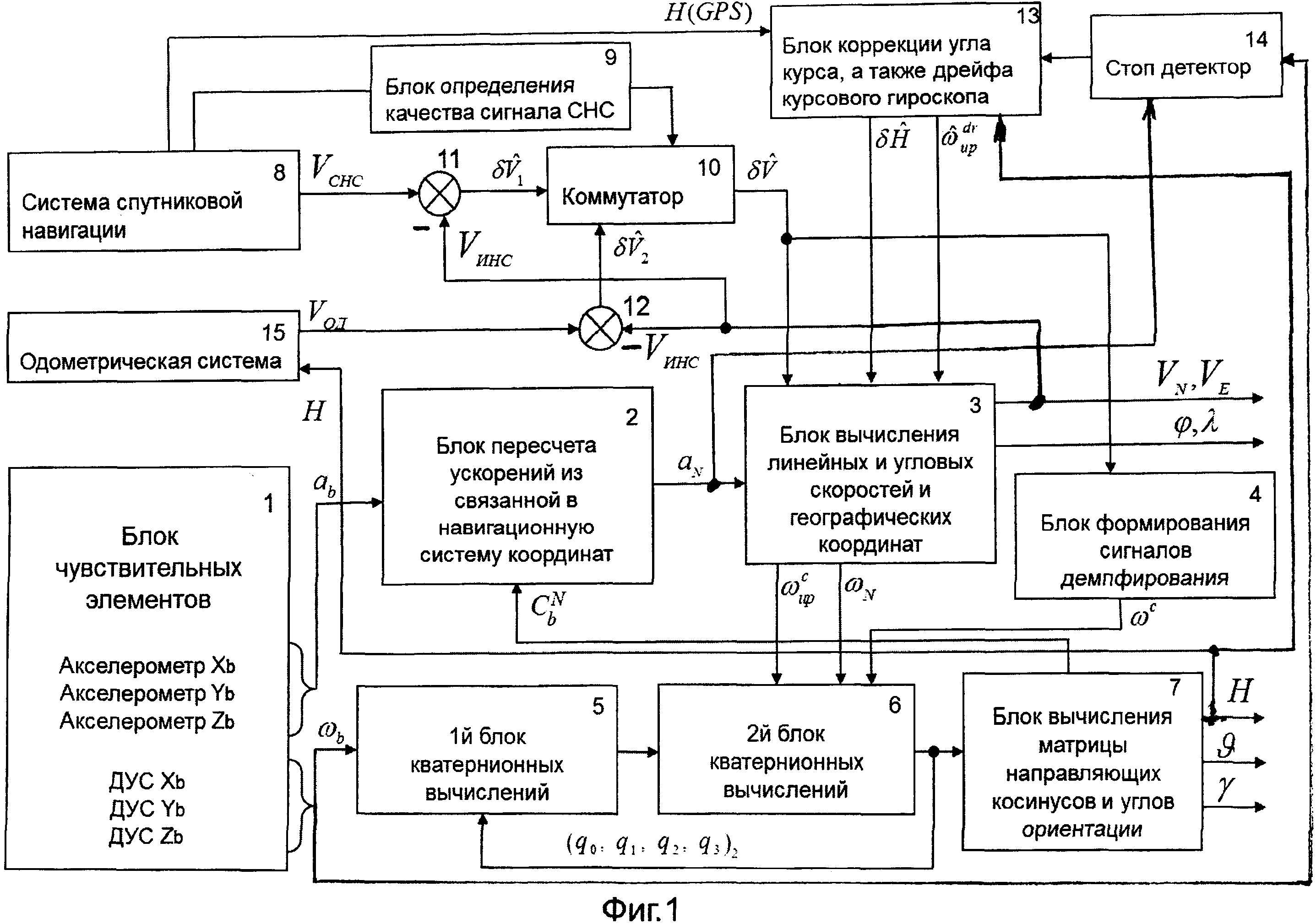
Фиг.1 - блок-схема устройства предлагаемой системы.
Фиг.2 - сравнение временных графиков ошибок определения координат предлагаемым устройством и традиционной системой из уровня техники.
Осуществление изобретения
На фиг.1 блоки системы имеют следующую нумерацию: 1 - блок ЧЭ, состоящий из трех акселерометров и трех датчиков угловой скорости (ДУС), расположенных по трем ортогональным осям; 2 - блок пересчета ускорений из связанной в навигационную систему координат; 3 - блок вычисления линейных и угловых скоростей и географических координат; 4 - блок формирования сигналов демпфирования; 5 - первый блок кватернионных вычислений; 6 - второй блок кватернионных вычислений; 7 - блок вычисления матрицы направляющих косинусов и углов ориентации; 8 - СНС (приемник сигналов СНС); 9 - блок определения качества сигнала СНС; 10 - коммутатор векторных сигналов; 11 - первый сумматор-вычитатель векторных сигналов; 12 - второй сумматор-вычитатель векторных сигналов; 13 - блок коррекции угла курса, а также дрейфа курсового (азимутального) гироскопа; 14 - блок стоп детектора; 15 - блок одометрической системы.
На схеме приняты следующие обозначения сигналов устройства:
из блока 1: a b - вектор сигналов кажущихся ускорений с акселерометров в связанной системе и ωb - вектор сигналов абсолютной угловой скорости от ДУС в связанной системе координат;
из блока 2: a N - вектор кажущихся ускорений в навигационной системе координат;
из блока 3: ωN - вектор абсолютной угловой скорости навигационного трехгранника для управления вычислительной платформы;
 - управляющий (корректирующий) сигнал вертикальной угловой скорости для вычислительной платформы;
- управляющий (корректирующий) сигнал вертикальной угловой скорости для вычислительной платформы;
VИНС - векторный сигнал линейной скорости объекта относительно Земли в проекциях на оси навигационного трехгранника (VN, VE - составляющие вектора выходной линейной скорости V объекта в северном и восточном направлениях);
φ, λ - выходные географические координаты объекта: широта и долгота;
из блока 4: ωc - вектор корректирующих (управляющих) сигналов угловой скорости демпфирования вычислительной платформы;
из блока 6: q0, q1, q2, q3 - кватернионы поворота от связанной системы координат к навигационной системе координат;
из блока 7: углы ориентации объекта (выходные сигналы системы): Н - курс, ϑ - тангаж, γ - крен; а также:  - матрица направляющих косинусов между связанной и навигационной системами координат;
- матрица направляющих косинусов между связанной и навигационной системами координат;
из блока 8: VCHC - векторный сигнал линейной скорости объекта относительно Земли, определенной датчиками СНС; H(GPS) - путевой угол объекта по показаниям СНС;
из блока 15: VОД - векторный сигнал линейной скорости объекта, определенной одометрической системой (ОД) и ее датчиками;
из векторного коммутатора 10:  - выбранная коммутатором из двух разностей разность сигналов линейных скоростей;
- выбранная коммутатором из двух разностей разность сигналов линейных скоростей;
из первого векторного сумматора-вычитателя 11:  - разность сигналов линейных скоростей по показаниям ИНС и СНС;
- разность сигналов линейных скоростей по показаниям ИНС и СНС;
из второго векторного сумматора-вычитателя 12:  - разность сигналов линейных скоростей по показаниям ИНС и одометрической системы;
- разность сигналов линейных скоростей по показаниям ИНС и одометрической системы;
из блока 13:  - оценка ошибки системы по курсу,
- оценка ошибки системы по курсу,  - оценка ошибки угловой скорости (дрейфа) моделируемого азимутального (курсового) гироскопа.
- оценка ошибки угловой скорости (дрейфа) моделируемого азимутального (курсового) гироскопа.
Информационный и сигнальный обмен между входами и выходами блоков осуществляют по линиям связи, показанным на блок-схеме сплошными тонкими линиями. Линии связи представляют собой известные линии связи и информационного обмена, например, по последовательному коду, по параллельному коду, мультиплексные и др. В качестве каналов передачи данных могут использоваться различные цифровые и аналоговые каналы, например, каналы информационного обмена, выполненные в соответствии с ГОСТ 18977-79 (Комплексы бортового оборудования. Типы функциональных связей. Виды и уровни электронных сигналов).
Устройство системы
Для повышения точности и эффективности автономного счисления скоростей и координат в отсутствии сигналов от СНС, устройство собрано, запрограммировано, отлажено и работает следующим образом.
По величинам сигналов угловых скоростей wb, измеряемых ДУС блока 1, рассчитываются элементы кватерниона конечного поворота от связанной системы координат к инерциальной (блок 5), а затем от инерциальной системы координат к навигационной (блок 6). По элементам (q0, q1, q2, q3) второго кватерниона конечного поворота (блок 6) в блоке 7 рассчитываются элементы матрицы направляющих косинусов
между связанной и навигационной системами координат, а также выходные углы ориентации объекта (курс, тангаж, крен). Также элементы (q0, q1, q2, q3) второго кватерниона используются в первом блоке кватернионных вычислений (блок 5) в качестве корректирующих сигналов обратной связи.
Для следующего шага вычислений в блоке 2 по полученным элементам матрицы направляющих косинусов
осуществляют пересчет ускорений a
b, измеряемых акселерометрами блока 1, из связанной в навигационную систему координат: .
.
Затем в блоке 3 осуществляют вычисление линейных и угловых скоростей объекта в навигационной системе координат и вычисление географических координат объекта. Рассчитанные угловые скорости, а также управляющие сигналы коррекции угловых скоростей поступают на соответствующие входы 2-го кватернионного блока (блок 6).
Для реализации сигналов демпфирования вычислительной платформы БИНС в блоках 3 и 4 используют (через коммутатор 10 векторных сигналов) разность сигналов линейных скоростей по показаниям ИНС и СНС (сумматор-вычитатель 11 векторных сигналов) или, когда сигнал СНС невозможно использовать, разность сигналов линейных скоростей по показаниям ИНС и одометрической системы (сумматор-вычитатель 12 векторных сигналов). Переключение режима работы векторного коммутатора 10 осуществляют в зависимости от качества принимаемого сигнала СНС, оцениваемого в блоке 9 определения качества сигнала СНС. Блок 9 работает следующим образом: качество сигнала СНС определяют по величине параметра DOP (Dilution of Precision, снижение точности). Величина DOP характеризует геометрию расположения спутников глобальной навигационной системы относительно антенны приемника СНС. Чем больше величина DOP, тем ближе друг к другу расположены спутники и, следовательно, тем ниже точность получаемых навигационных параметров. Оптимальной считается величина DOP менее 6. При величине DOP>20 или отсутствии сигнала СНС информацию СНС в дальнейших расчетах не используют. В блоке 15 также задействован выходной угол курса системы из блока 7 для раскладки вектора скорости VОД по составляющим в северном и восточном направлениях с помощью функций синуса и косинуса угла курса.
Выбранную коммутатором 10 векторную разность
линейных скоростей (в виде составляющих в северном и восточном направлениях) используют для формирования первых демпфирующих сигналов  ,
,  в блоке 3 (эти сигналы используются в качестве сигналов обратной связи для вычисления сигналов линейных скоростей в блоке 3) и вторых демпфирующих сигналов
в блоке 3 (эти сигналы используются в качестве сигналов обратной связи для вычисления сигналов линейных скоростей в блоке 3) и вторых демпфирующих сигналов  ,
,  в блоке 4, и все эти демпфирующие сигналы поступают на соответствующие корректирующие входы второго блока кватернионных вычислений 6. Коэффициенты K и Kb - параметры формирования сигналов демпфирования (их примерные размерные величины могут быть: K=1,4 1/с, Kb=0,05 1/метр).
в блоке 4, и все эти демпфирующие сигналы поступают на соответствующие корректирующие входы второго блока кватернионных вычислений 6. Коэффициенты K и Kb - параметры формирования сигналов демпфирования (их примерные размерные величины могут быть: K=1,4 1/с, Kb=0,05 1/метр).
В результате на соответствующие входы 2-го кватернионного блока 6 из блока 3 идут сигналы: вектора абсолютной угловой скорости ωN навигационного трехгранника для управления вычислительной платформы БИНС, управляющий (корректирующий) сигнал вертикальной угловой скорости  для вычислительной платформы и из блока 4 сигналы демпфирования ωc вычислительной платформы БИНС по угловой скорости.
для вычислительной платформы и из блока 4 сигналы демпфирования ωc вычислительной платформы БИНС по угловой скорости.
В блоке 13 коррекции угла курса реализован следующий оригинальный цифровой алгоритм. Калибровка ошибки курса (азимута) по сигналу СНС в предлагаемом устройстве оригинальна тем, что показание системы по выходному углу курса (из блока 7) следует за показаниями СНС по путевому углу (из блока 8) (СНС определяет только путевой угол, а ИНС определяет угол курса). При этом в блоке 13 выходной сигнал курса вычисляют по дискретной формуле апериодического звена
 ,
,
где
H(GPS) - путевой угол, вычисляемый GPS;
НИНС - сигнал курса Н по ИНС из блока 7
k - индекс текущего момента дискретизации по времени;
KH - коэффициент усиления дискретного апериодического звена (ориентировочно величина KH=10-3 - в обычном режиме, когда нет проскальзывания в повороте колеса или гусениц наземного транспортного средства, но в случае проскальзывания (если модуль скорости изменения угла курса  ) KH=0, так как в этом случае нельзя корректировать ИНС по показаниям СНС). Таким образом, разность показаний системы по курсу и СНС по путевому углу пропускается через указанное апериодическое звено и далее компенсируется в показаниях ИНС посредством определяемого в фильтре Калмана блока 13 сигнала оценки ошибки системы по курсу δH, который поступает в блок 3 для формирования корректирующей составляющей угловой скорости
) KH=0, так как в этом случае нельзя корректировать ИНС по показаниям СНС). Таким образом, разность показаний системы по курсу и СНС по путевому углу пропускается через указанное апериодическое звено и далее компенсируется в показаниях ИНС посредством определяемого в фильтре Калмана блока 13 сигнала оценки ошибки системы по курсу δH, который поступает в блок 3 для формирования корректирующей составляющей угловой скорости  .
.
В блоке 13 вычисляют текущие мгновенные сигналы оценки ошибки системы по курсу δН и оценки ошибки угловой скорости (дрейфа)  курсового гироскопа с использованием традиционного фильтра Калмана с моделями
курсового гироскопа с использованием традиционного фильтра Калмана с моделями
 - модель системы;
- модель системы;
z=Нout - НИНС - модель измерений.
При этом в остановках объекта срабатывает блок 14 стоп-детектора с общим сигналом результирующего сравнения скалярного модуля сигналов линейного ускорения и угловой скорости объекта со своими заданными пороговыми значениями. Пороговые значения не зависят от типа объекта-носителя, но зависят от типа чувствительных элементов (микроэлектромеханических ЧЭ низкой точности или волоконно-оптических датчиков), входящих в состав системы. Пороги выбирают в следующих пределах: по ускорению δ<0,01-0,1 м /с2, по угловой скорости δ<0,0001-0,001 град/с. Эти пороги имеют физический смысл ограничений на коррекцию БИНС во время маневра объекта. После срабатывания общего сигнала стоп-детектора, идущего из блока 14 в блок 13, в блоке 13 происходит осреднение сигнала моделируемого азимутального (курсового) гироскопа. Это осреднение необходимо, так как мгновенное значение оценки дрейфа содержит существенный высокочастотный шум. Для того чтобы отфильтровать этот шум, возможно использование любого фильтра низких частот. Полученный из блока 13 сигнал
оценки ошибки угловой скорости (дрейфа) азимутального (курсового) гироскопа компенсируется в блоке 3 вычисления линейных и угловых скоростей. Компенсация производится простым вычитанием полученной оценки дрейфа из сигнала угловой скорости.
Для работы предлагаемой системы перед общим началом движения объекта осуществляют выставку БИНС в горизонт (определяют начальные углы курса и тангажа), и только после начала движения осуществляют выставку системы по азимуту и оценку дрейфа курсового гироскопа с использованием сигнала от СНС. После чего система может начать работать в автономном режиме без СНС, используя только сигнал одометрической системы.
На Фиг.2 представлены ошибки БИНС по географическим координатам широты и долготы в автономном режиме (при недоступной СНС) предлагаемой системы и прототипа. Ошибки счисления координат рассчитываются в соответствии с уравнениями алгоритма прототипа, который является классическим алгоритмом навигационного решения для расчета ошибок, и сравниваются с расчетом по предлагаемому устройству. При этом в качестве «сырых» входных сигналов используются данные натурных испытаний. При сравнении графиков видно критическое повышение точности счисления координат с течением длительного времени (порядка нескольких тысяч секунд) автономной работы предлагаемой системы.
Предлагаемая техническая система прошла успешные испытания и реализована компанией ООО «ТеКнол» (Россия) в устройстве изделия БИНС-ТЭК для различного типа транспортных наземных средств.
Бесплатформенная интегрированная навигационная система средней точности для мобильного наземного объекта, содержащая блок чувствительных элементов (ЧЭ), состоящий из трех акселерометров и трех датчиков угловой скорости по трем ортогональным осям, блок пересчета ускорений из связанной в навигационную систему координат, блок вычисления линейных и угловых скоростей и географических координат, блок формирования сигналов демпфирования, первый и второй блоки кватернионных вычислений, блок вычисления матрицы направляющих косинусов и углов ориентации системы, приемник сигналов спутниковой навигационной системы (СНС), блок определения качества сигнала СНС, коммутатор векторных сигналов, первый и второй сумматоры-вычитатели векторных сигналов, блок коррекции угла курса, а также дрейфа курсового гироскопа, блок стоп-детектора, блок одометрической системы; при этом выходы сигналов линейных ускорений акселерометров блока ЧЭ поступают на первый вход блока пересчета ускорений из связанной в навигационную систему координат, а ко второму входу блока пересчета подключен первый выход сигналов матрицы направляющих косинусов блока вычислений матрицы направляющих косинусов и углов ориентации системы; выходы угловых скоростей датчиков скоростей блока ЧЭ поступают на первый вход первого блока кватернионных вычислений, выход которого подключен к первому входу второго блока кватернионных вычислений, выход которого подключен к входу блока вычисления матрицы направляющих косинусов и углов ориентации и ко второму входу обратной связи первого блока кватернионных вычислений; выход сигналов ускорений из блока пересчета ускорений из связанной в навигационную систему координат подключен к первому входу блока вычисления линейных и угловых скоростей и географических координат; из приемника сигналов СНС поступают три сигнала, первый из которых - векторный сигнал линейной скорости объекта по данным СНС поступает на плюсовый вход первого сумматора-вычитателя, второй сигнал качества связи с СНС поступает на вход блока определения качества сигнала СНС, выход которого соединен с управляющим входом коммутатора, а третий сигнал путевого угла объекта по данным СНС поступает на первый вход блока коррекции угла курса, а также дрейфа курсового гироскопа; при этом второй вход указанного блока коррекции связан с выходом сигнала угла курса системы из блока вычисления матрицы направляющих косинусов и углов ориентации, а третий вход указанного блока коррекции соединен с выходом блока стоп-детектора, первый вход которого соединен с выходом сигнала ускорения из блока пересчета ускорений из связанной в навигационную систему координат, а на второй вход блока стоп-детектора поступают сигналы угловых скоростей из блока ЧЭ; векторный сигнал линейной скорости системы с третьего выхода блока вычисления линейных и угловых скоростей и географических координат поступает на входы вычитания первого и второго сумматоров-вычитателей, выходы которых соединены с соответствующими входами вышеуказанного коммутатора; на плюсовый вход второго сумматора-вычитателя поступает сигнал скорости из блока одометрической системы, на вход которого поступает выходной сигнал курса всей системы из блока вычисления матрицы направляющих косинусов и углов ориентации; выход коммутатора соединен со входом блока формирования сигналов демпфирования и вторым входом блока вычисления линейных и угловых скоростей и географических координат, третий и четвертый входы которого соединены с соответствующими первым и вторым выходами блока коррекции угла курса, а также дрейфа курсового гироскопа; векторный сигнал абсолютной угловой скорости навигационного трехгранника с первого выхода блока вычисления линейных и угловых скоростей и географических координат поступает на второй вход второго блока кватернионных вычислений, на третий и четвертый входы которого поступают первый и второй корректирующие сигналы угловых скоростей соответственно со второго выхода (управляющий сигнал вертикальной угловой скорости) из блока вычисления линейных и угловых скоростей и географических координат и с выхода блока формирования сигналов демпфирования; третий и четвертый выходы блока вычисления линейных и угловых скоростей и географических координат являются соответственно выходами всей системы по линейной скорости и географическим координатам объекта; второй, третий и четвертый выходы сигналов углов ориентации блока вычисления матрицы направляющих косинусов и углов ориентации являются соответствующими выходами системы по углам курса, тангажа и крена объекта.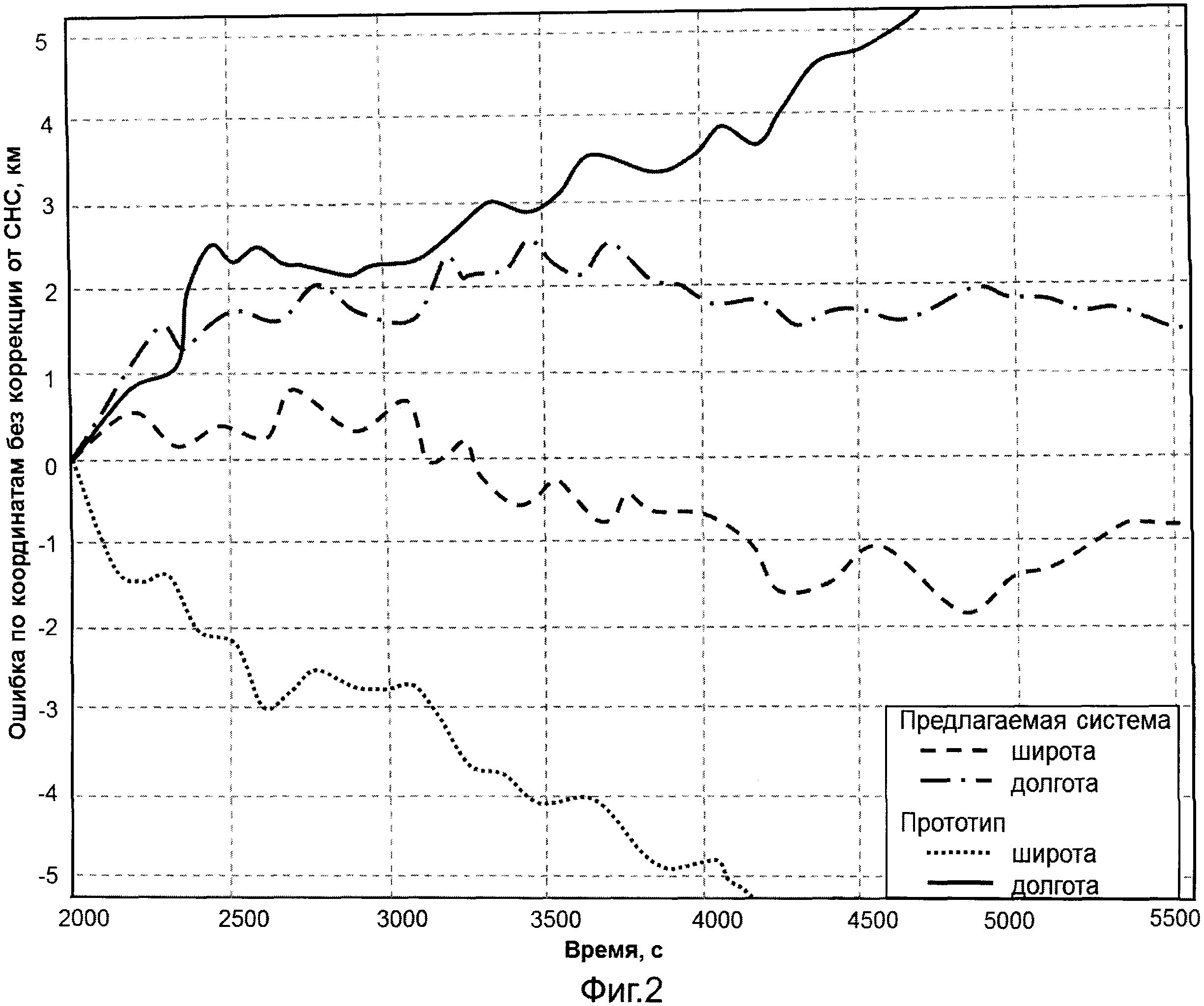
Интегрированная бесплатформенная система навигации средней точности для беспилотного летательного аппарата
Интегрированная бесплатформенная система навигации средней точности для беспилотного летательного аппарата

