Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники
Изобретение относится к устройству управления для гибридного транспортного средства.
Известный уровень техники
Гибридное транспортное средство может перемещаться на многих источниках энергии, таких как электрическая энергия и топливо, а также может перемещаться при различных режимах движения, что зависит от используемого источника энергии. В качестве режимов движения гибридного транспортного средства известен, например, режим движения EV, в котором гибридное транспортное средство перемещается движущей силой электродвигателя, питаемого электрической энергией только от аккумуляторной батареи, последовательный режим движения, в котором гибридное транспортное средство перемещается движущей силой электродвигателя, питаемого электрической энергией, которая генерируется электрогенератором, использующим для этого мощность двигателя внутреннего сгорания, а также двигательный режим движения, в котором гибридное транспортное средство перемещается движущей силой, непосредственно передаваемой на ведущие колеса от двигателя внутреннего сгорания. Например, Патентная литература 1 описывает гибридное транспортное средство, в котором режим движения изменяется исходя из требуемого механического момента, который необходим для передвижения этого транспортного средства.
Литература родственной области техники
Патентная литература
Патентная литература 1: JP-H09-224304-A
Краткое изложение сущности изобретения
Проблемы, которые должны быть решены изобретением
В гибридном транспортном средстве, описанном в Патентной литературе 1, по мере того, как требуемый механический момент возрастает, режимы движения переключаются из режима движения с приводом только от электродвигателя (режим движения EV) на режим движения с приводом только от двигателя внутреннего сгорания (двигательный режим движения). Однако когда ведущие колеса приводятся в движение непосредственно от двигателя внутреннего сгорания, величина передаточного отношения, которую можно при этом задать, будет ограниченной. Поэтому здесь может возникнуть такая ситуация, при которой уже трудно будет обеспечить работу двигателя внутреннего сгорания на рабочей точке, в которой достигается хорошая топливная экономичность. Ввиду этого обстоятельства было бы желательно, чтобы режим движения переключался из режима движения EV в последовательный режим движения, при котором может быть свободно задана рабочая точка.
Кроме того, когда режимы движения переключаются исходя из требуемого механического момента, который необходим для перемещения транспортного средства, транспортное средство будет перемещаться в режиме движения EV, хотя аккумуляторная батарея будет уже не в состоянии выдавать требуемую электрическую энергию, которая соответствует требуемому механическому моменту, что зависит от таких условий, как состояние заряда (SOC) и температура этой аккумуляторной батареи. Поэтому существует опасность того, что общая характеристика управляемости транспортного средства ухудшится. Кроме того, если это происходит, то существует опасность того, что аккумуляторная батарея чрезмерно разрядится.
Настоящее изобретение было разработано с позиции этих проблем, а целью изобретения является предоставление устройства управления гибридного транспортного средства, которое может улучшить топливную экономичность и общую характеристику управляемости гибридного транспортного средства.
Средства решения этих проблем
Для достижения описанных выше целей настоящее изобретение в соответствии с пунктом 1 предусмотрено устройство управления гибридного транспортного средства, где гибридное транспортное средство содержит
двигатель внутреннего сгорания (например, двигатель внутреннего сгорания 109 в описанном далее примере осуществления),
электродвигатель (например, электродвигатель 101 в описанном далее примере осуществления),
электрогенератор (например, электрогенератор 107 в описанном далее примере осуществления), который генерирует электроэнергию движущей силой упомянутого двигателя внутреннего сгорания, и
аккумуляторную батарею (например, аккумуляторную батарею 113 в описанном далее примере осуществления), которая запасает электроэнергию, сгенерированную упомянутым электродвигателем или упомянутым электрогенератором, и подает электроэнергию на упомянутый электродвигатель,
при этом упомянутое гибридное транспортное средство имеет возможность
перемещаться в режиме движения EV, в котором упомянутый электродвигатель приводится в движение электроэнергией только упомянутой аккумуляторной батареи, и
в последовательном режиме движения, в котором упомянутый электродвигатель приводится в движение электроэнергией, сгенерированной упомянутым электрогенератором, который использует движущую силу упомянутого двигателя внутреннего сгорания,
а устройство управления содержит:
блок вывода требуемой движущей силы (например, блок управления ECU 119 в описанном далее примере осуществления), который выводит требуемую движущую силу, необходимую для упомянутого электродвигателя, базируясь на скорости гибридного транспортного средства и степени открытия педали акселератора,
блок вывода требуемой электроэнергии (например, блок управления ECU 119 в описанном далее примере осуществления), который выводит требуемую электроэнергию, базируясь на упомянутой требуемой движущей силе и скорости вращения упомянутого электродвигателя,
блок задания возможной наивысшей выходной величины (например, блок управления ECU 119 в описанном далее примере осуществления), который задает возможную наивысшую выходную величину (например, возможную наивысшую выходную величину PU в описанном далее примере осуществления) упомянутой аккумуляторной батареи, базируясь на состоянии упомянутой аккумуляторной батареи, и
блок суждения о начале работы двигателя внутреннего сгорания (например, блок управления ECU 119 в описанном далее примере осуществления), который выводит суждение о начале работы упомянутого двигателя внутреннего сгорания, базируясь на упомянутой требуемой электроэнергии,
при этом упомянутый блок суждения о начале работы двигателя внутреннего сгорания в случае, когда упомянутая требуемая электроэнергия превосходит упомянутую возможную наивысшую выходную величину, запускает упомянутый двигатель внутреннего сгорания так, что упомянутое гибридное транспортное средство перемещается в последовательном режиме движения.
Изобретение в соответствии с пунктом 2 предусматривает, основываясь на пункте 1,
устройство управления гибридного транспортного средства, отличающееся тем, что упомянутый последовательный режим движения содержит режим нулевого входа/выхода аккумуляторной батареи, в котором упомянутым электрогенератором генерируется часть электроэнергии, соответствующая только упомянутой требуемой электроэнергии для питания упомянутого электродвигателя, а
упомянутое устройство управления транспортного средства содержит также блок задания заданной величины (например, блок управления ECU 119 в описанном далее примере осуществления), который задает заданную величину (например, верхнюю граничную выходную величину снижения потребления топлива PL в описанном далее примере осуществления), базируясь на состоянии упомянутой аккумуляторной батареи, и
упомянутая заданная величина является величиной меньшей, чем упомянутая возможная наивысшая выходная величина, и наряду с этим является верхней граничной выходной величиной, которая удовлетворяет условию {(потери, возникающие при перемещении в режиме движения EV) + (потери, возникающие при генерации электроэнергии, которая потребляется в режиме движения EV)} < (потерь, возникающих в режиме движения с нулевым входом/выходом аккумуляторной батареи), и
упомянутый блок суждения о начале работы двигателя внутреннего сгорания в случае, когда упомянутая требуемая электроэнергия равна или больше, чем упомянутая заданная величина, и равна или меньше, чем упомянутая возможная наивысшая выходная величина, приводит в движение упомянутый двигатель внутреннего сгорания в соответствии с условиями движения транспортного средства, так что транспортное средство перемещается в последовательном режиме движения.
Изобретение в соответствии с пунктом 3 предусматривает, основываясь на пункте 2,
устройство управления гибридного транспортного средства, отличающееся тем, что
упомянутая возможная наивысшая выходная величина и упомянутая заданная величина задаются, базируясь на состоянии заряда упомянутой аккумуляторной батареи или температуры упомянутой аккумуляторной батареи.
Изобретение в соответствии с пунктом 4 предусматривает, основываясь на пункте 2,
устройство управления гибридного транспортного средства, отличающееся тем, что
упомянутая возможная наивысшая выходная величина и упомянутая заданная величина задаются исходя из меньшего из значений, которые выводятся, базируясь на состоянии заряда упомянутой аккумуляторной батареи и температуре упомянутой аккумуляторной батареи.
Изобретение в соответствии с пунктом 5 предоставляет, базируясь на любом из пунктов от пункта 2 до пункта 4, устройство управления гибридного транспортного средства, отличающееся тем, что
упомянутая возможная наивысшая выходная величина и упомянутая заданная величина задаются меньше в соответствии с тем, как становится меньше степень зарядки упомянутой аккумуляторной батареи.
Изобретение в соответствии с пунктом 6 предусматривает, основываясь на одном из пунктов от пункта 2 до пункта 5, устройство управления гибридного транспортного средства, отличающееся тем, что
упомянутая возможная наивысшая выходная величина и упомянутая заданная величина задаются меньше в соответствии с тем, как становится меньше температура упомянутой аккумуляторной батареи.
Изобретение в соответствии с пунктом 7 предусматривает, основываясь на любом из пунктов от пункта 2 до пункта 6, устройство управления гибридного транспортного средства, также содержащее:
первый блок вывода уровня пригодности (например, блок управления ECU 119 в описанном далее примере осуществления), который осуществляет нечеткие рассуждения по первой функции принадлежности, заданной в зависимости от требуемой электроэнергии, и выводит первый уровень пригодности в интервале между упомянутой возможной наивысшей выходной величиной и упомянутой заданной величиной, и
второй блок вывода уровня пригодности (например, блок управления ECU 119 в описанном далее примере осуществления), который осуществляет нечеткие рассуждения по второй функции принадлежности, заданной в зависимости от величины изменения степени открытия педали акселератора, и
выводит второй уровень пригодности, и блок вывода меры требования на начало работы (например, блок управления ECU 119 в описанном далее примере осуществления), который выводит меру требования на начало работы упомянутого двигателя внутреннего сгорания, базируясь на упомянутом первом уровне пригодности и упомянутом втором уровне пригодности,
при этом упомянутый блок суждения о начале работы двигателя внутреннего сгорания в случае, когда упомянутая требуемая электроэнергия является равной или больше упомянутой заданной величины и равной или меньше упомянутой возможной наивысшей выходной величины, приводит в движение упомянутый двигатель внутреннего сгорания, переводя транспортное средство в последовательный режим движения, если интегральная величина, полученная интегрированием упомянутой степени требования начала работы превосходит предварительно заданную величину.
Изобретение в соответствии с пунктом 8 предусматривает, основываясь на пункте 7,
устройство управления гибридного транспортного средства, отличающееся тем, что
упомянутая первая функция принадлежности корректируется в соответствии с температурой охлаждающей жидкости упомянутого двигателя внутреннего сгорания.
Изобретение в соответствии с пунктом 9 предусматривает, основываясь на пункте 7 или пункте 8, устройство управления гибридного транспортного средства, отличающееся тем, что
упомянутая первая функция принадлежности корректируется в соответствии с электроэнергией, которая потребляется вспомогательным оборудованием (например, вспомогательное оборудование 117 в описанном далее примере осуществления).
Изобретение в соответствии с пунктом 10 предоставляет, базируясь на любом из пунктов от пункта 7 до пункта 9, устройство управления гибридного транспортного средства, также содержащее
блок суждения о намерении ускорения, который выводит суждение о намерении водителя по ускорению,
при этом в случае, когда упомянутый блок суждения о намерении ускорения выводит суждение о том, что упомянутое намерение водителя по ускорению является высоким, упомянутая вторая функция принадлежности корректируется в сторону приращения, а в случае, когда упомянутым блоком суждения о намерении ускорения выводится суждение о том, что упомянутое намерение ускорения является низким, упомянутая вторая функция принадлежности корректируется в сторону уменьшения.
Изобретение в соответствии с пунктом 11 предусматривает, основываясь на любом из пунктов от пункта 2 до пункта 10, устройство управления гибридного транспортного средства, отличающееся тем, что
упомянутое транспортное средство может перемещаться в двигательном режиме движения, в котором ведущие колеса приводятся в движение энергией упомянутого двигателя внутреннего сгорания за счет подсоединения муфты (например, муфты 115 в описанном далее примере осуществления), которая установлена между упомянутым двигателем внутреннего сгорания и упомянутым электродвигателем,
при этом упомянутое устройство управления содержит также блок подсоединения/отсоединения муфты (например, блок управления ECU 119 в описанном далее примере осуществления), который подсоединяет или отсоединяет упомянутую муфту, и в случае,
когда потери, возникающие при последовательном режиме движения, будут больше, чем потери, возникающие при двигательном режиме движения, упомянутый блок подсоединения/отсоединения муфты подсоединяет упомянутую муфту, и режим движения переключается с последовательного режима движения на двигательный режим движения.
Преимущества изобретения
В соответствии с пунктом 1 изобретения двигатель внутреннего сгорания начинает работать, когда требуемая электрическая энергия, необходимая для электродвигателя, превышает возможную наивысшую выходную величину, которая устанавливается в соответствии с состоянием аккумуляторной батареи. Следовательно, не только можно гарантировать желаемую требуемую электрическую энергию, но также может быть предотвращена избыточная зарядка аккумуляторной батареи.
В соответствии с пунктом 2 изобретения задаваемая величина представляет собой максимальную величину требуемой электрической энергии, при которой потребление топлива, когда транспортное средство перемещается в режиме движения EV, улучшается в большей степени, чем потребление топлива тогда, когда транспортное средство перемещается в режиме нулевого входа/выхода аккумуляторной батареи, и суждение о том, начинать или не начинать работу двигателя внутреннего сгорания выводится на базе заданной величины. Поэтому потребление топлива может быть еще более оптимизировано. Кроме того, заданная величина устанавливается исходя из состояния аккумуляторной батареи, и поэтому может быть предотвращена избыточная зарядка этой аккумуляторной батареи. Кроме того, в случае, когда требуемая электрическая энергия, необходимая для электродвигателя, составляет величину где-то между заданной величиной и возможной наивысшей выходной величиной, суждение о том, начинать или не начинать работу двигателя внутреннего сгорания выводится на базе условий движения транспортного средства. Поэтому двигатель внутреннего сгорания можно будет запустить в надлежащий момент времени с учетом текущих условий движения транспортного средства, и тем самым можно предотвратить бесполезную работу двигателя внутреннего сгорания.
В соответствии с пунктами от 3 до 6 изобретения принимается во внимание, что электрическая энергия, которая может быть выдана, понижается в зависимости от величины SOC и температуры аккумуляторной батареи. И, кроме того, может быть гарантирована требуемая электрическая энергия за счет более раннего начала работы двигателя внутреннего сгорания для генерации электроэнергии.
В соответствии с пунктом 7 изобретения суждение о том, начинать или не начинать работу двигателя внутреннего сгорания, осуществляется методами нечетких рассуждений, базируясь на требуемой электроэнергии, необходимой для электродвигателя, и намерении водителя по запуску двигателя внутреннего сгорания для ускорения транспортного средства. Поэтому отсутствует опасность того, что недостаточная выходная величина аккумуляторной батареи явится причиной недостаточной движущей силы, и вместе с тем обеспечивается возможность предотвращения бесполезной работы двигателя внутреннего сгорания. Кроме того, интегрированием меры требования на начало работы двигателя внутреннего сгорания может быть вынесено суждение об условиях непрерывности движения транспортного средства, и поэтому обеспечивается возможность предотвращения бесполезной работы двигателя внутреннего сгорания. За счет этого может быть получено более точное управление, отражающее намерения водителя.
В соответствии с пунктом 8 изобретения принимается во внимание температура охлаждающей жидкости двигателя внутреннего сгорания и поэтому становится возможным вынести суждение о начале работы двигателя внутреннего сгорания в соответствии с температурой охлаждающей жидкости двигателя внутреннего сгорания. Тем самым обеспечивается возможность предотвращения бесполезной работы двигателя внутреннего сгорания.
В соответствии с пунктом 9 изобретения принимается во внимание электрическая энергия, потребляемая вспомогательным оборудованием, поэтому требуемая электрическая энергия может быть предоставлена за счет ее генерации при более раннем начале работы двигателя внутреннего сгорания, и тем самым обеспечивается возможность предотвращения избыточной зарядки аккумуляторной батареи.
В соответствии с пунктом 10 изобретения принимаются во внимание намерения водителя, и поэтому не только могут быть улучшены общие характеристики управления, но также может быть еще более оптимизировано потребление топлива.
В соответствии с пунктом 11 изобретения, когда устанавливается, что потери в двигательном режиме движения являются низкими, режим движения может быть быстро переведен из последовательного режима движения в двигательный режим движения и поэтому потребление топлива может быть еще более оптимизировано.
Краткое описание чертежей
Фиг.1 - показывает гибридное транспортное средство, в котором используется устройство управления настоящего примера осуществления.
Фиг.2 - показывает подробную конфигурацию устройства управления гибридного транспортного средства для настоящего примера осуществления.
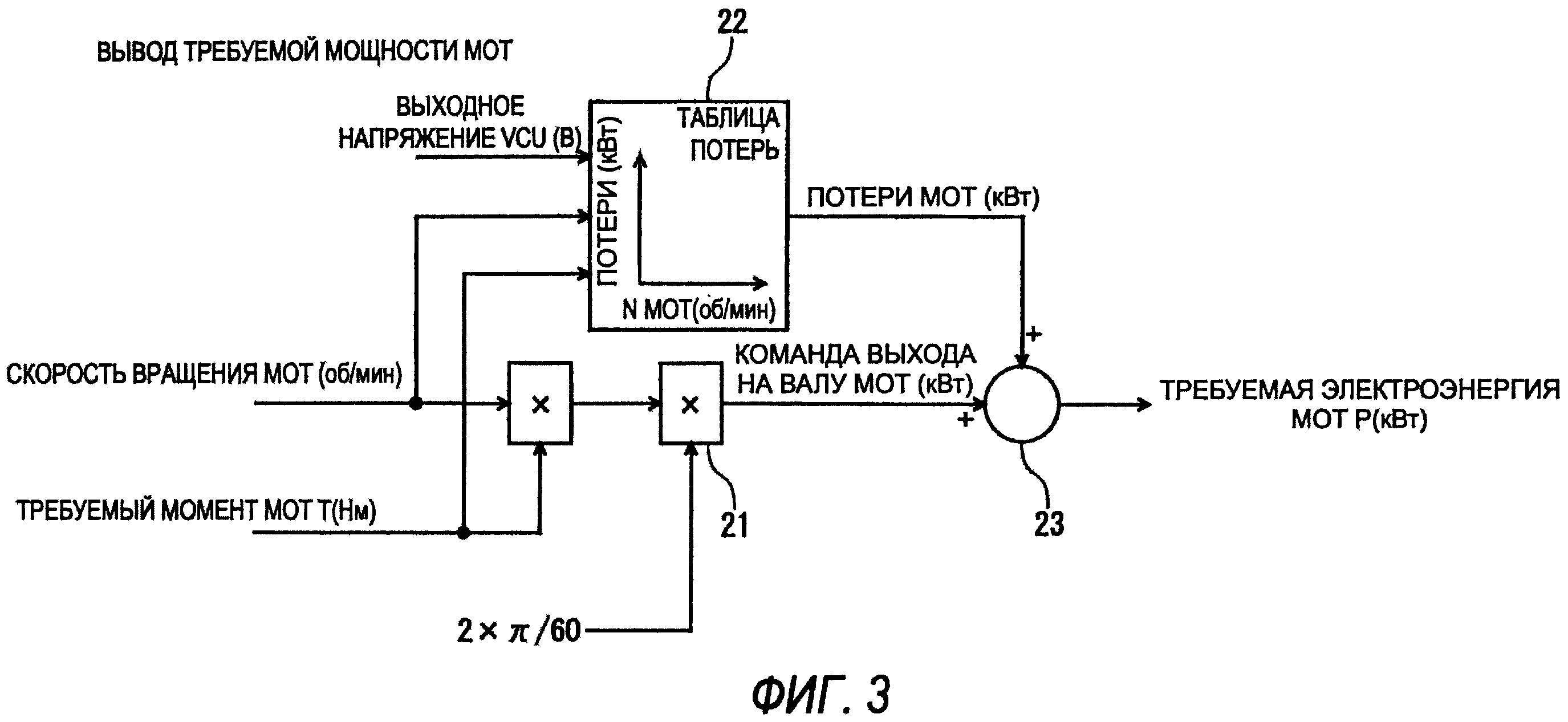
Фиг.3 - показывает подробную конфигурацию блока вывода требуемой электроэнергии МОТ, представленного на Фиг.2.
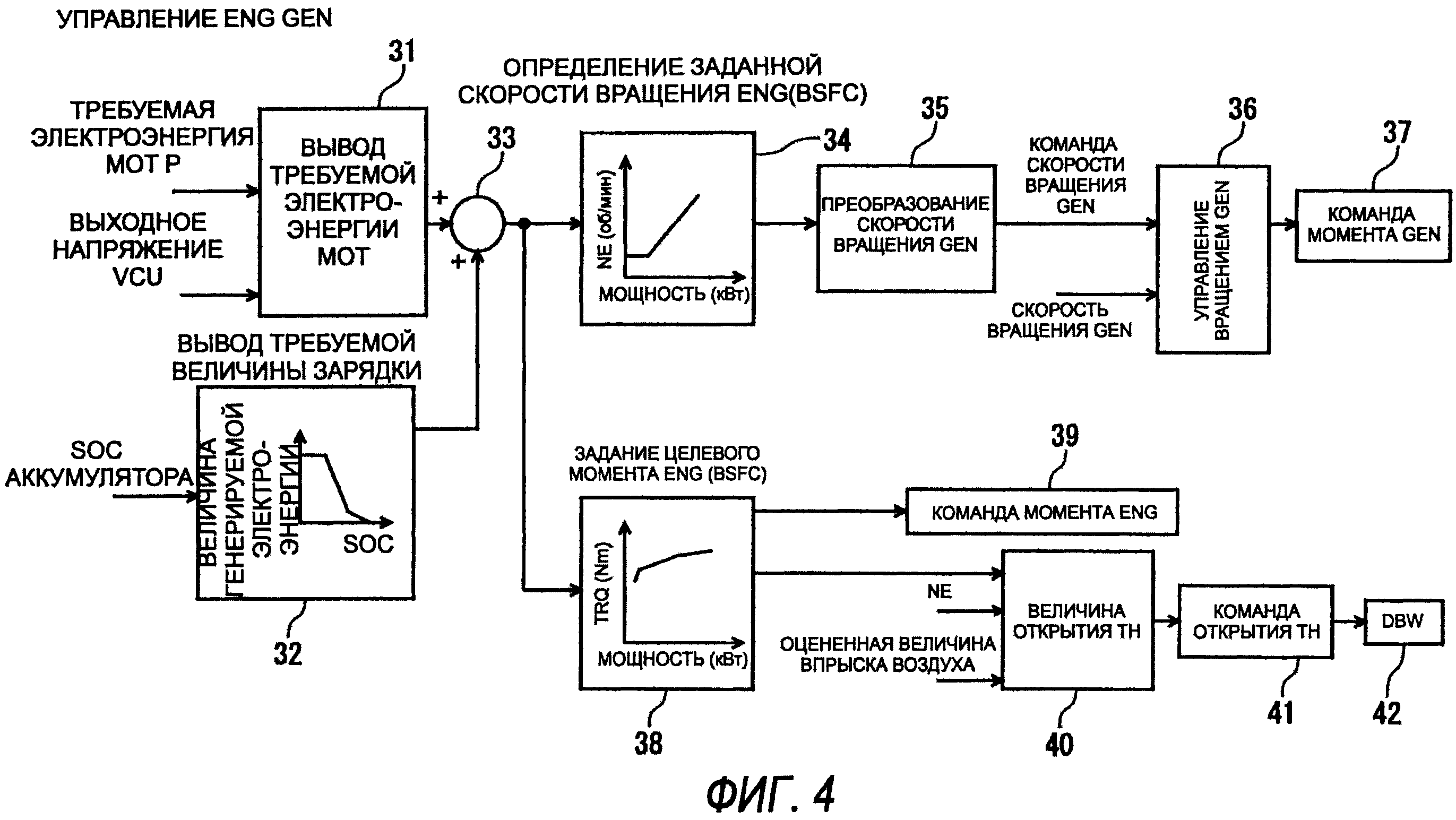
Фиг.4 - показывает подробную конфигурацию блока управления ENG-GEN, представленного на Фиг.2.
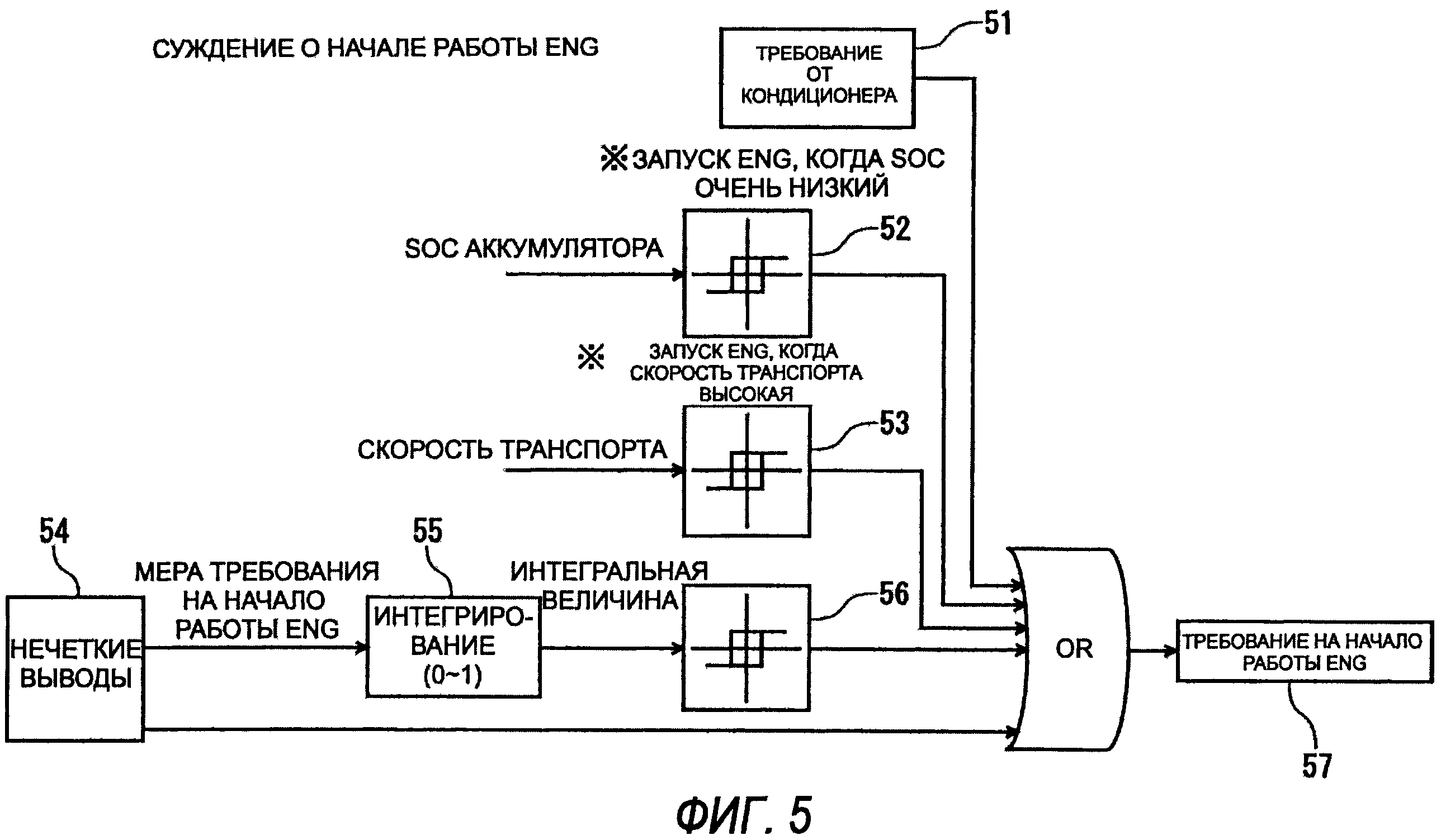
Фиг.5 - показывает подробную конфигурацию блока нечетких суждений о начале движения ENG, представленного на Фиг.2.
Фиг.6 - разъясняет оценку уровня пригодности режима движения.
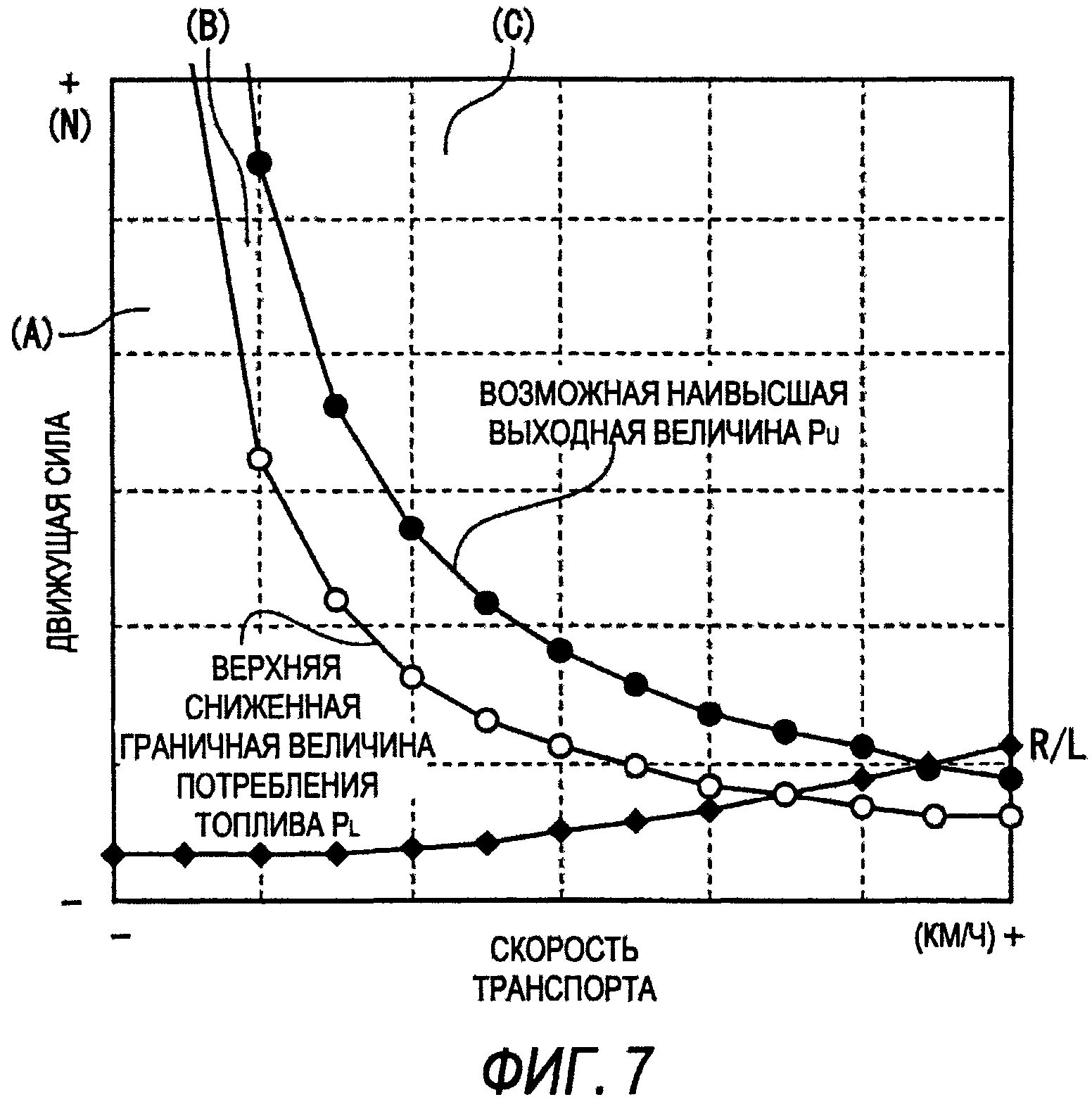
Фиг.7 - показывает возможную наивысшую выходную величину и верхнюю граничную выходную величину снижения потребления топлива.
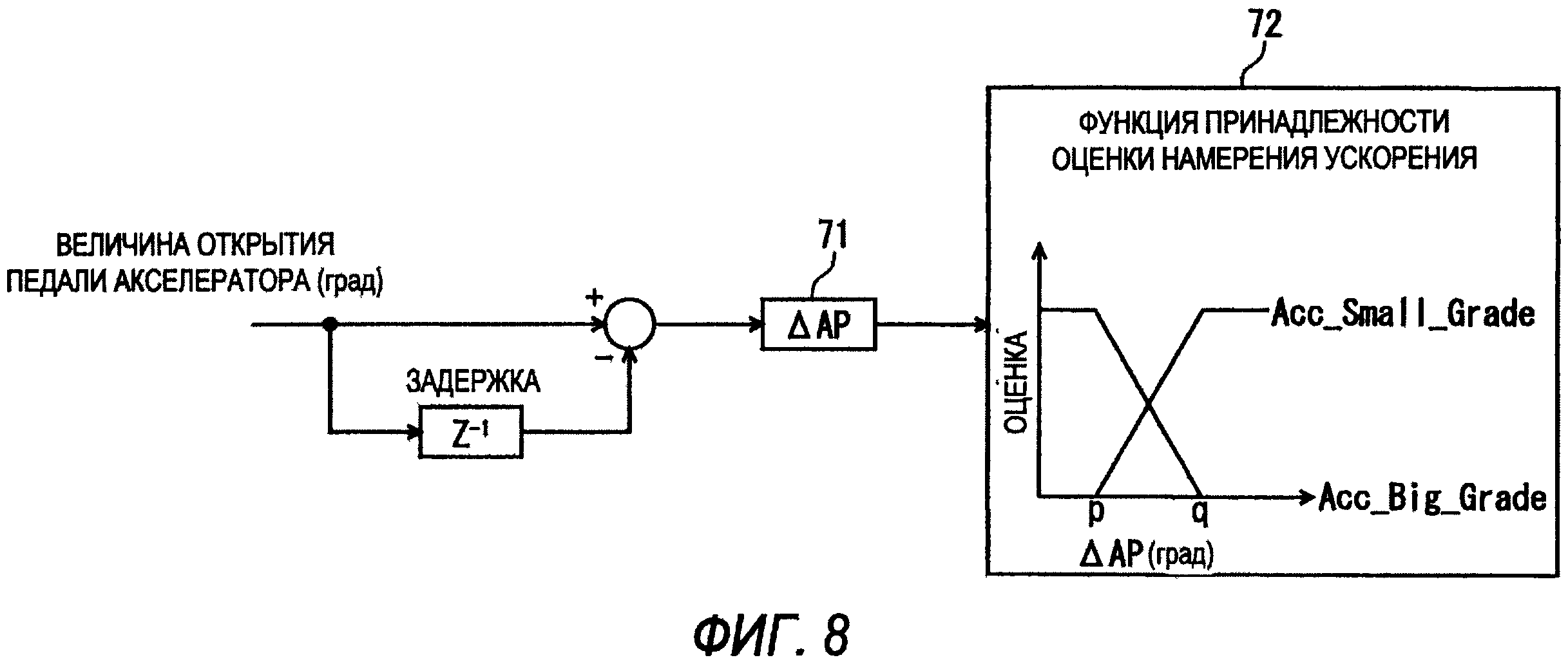
Фиг.8 - показывает оценку уровня намерения к ускорению.
Фиг.9 - показывает подробную конфигурацию блока нечетких выводов, представленного на Фиг.5.
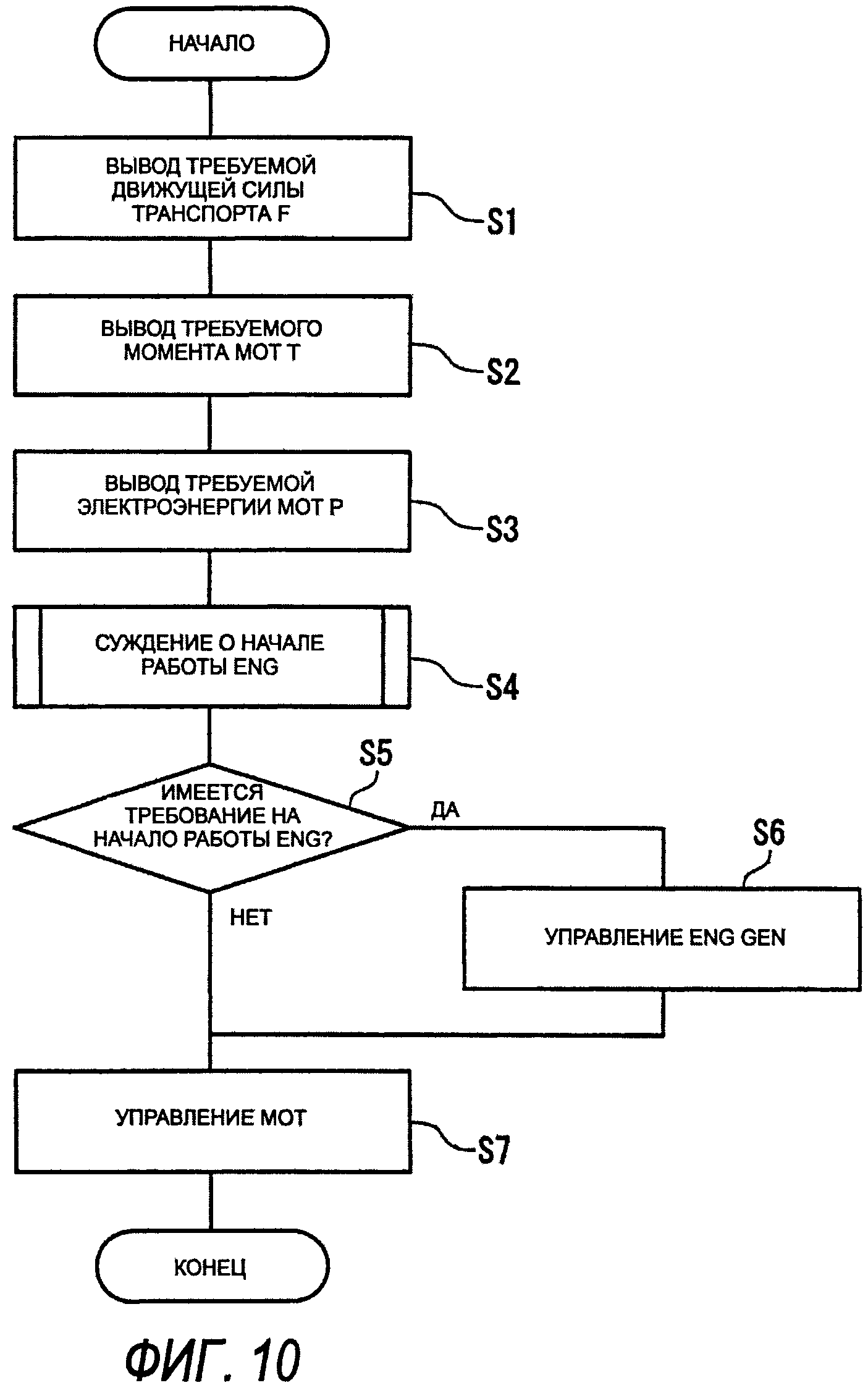
Фиг.10 - блок-схема, которая показывает процедуры устройства управления гибридного транспортного средства, в соответствии с настоящим примером осуществления.
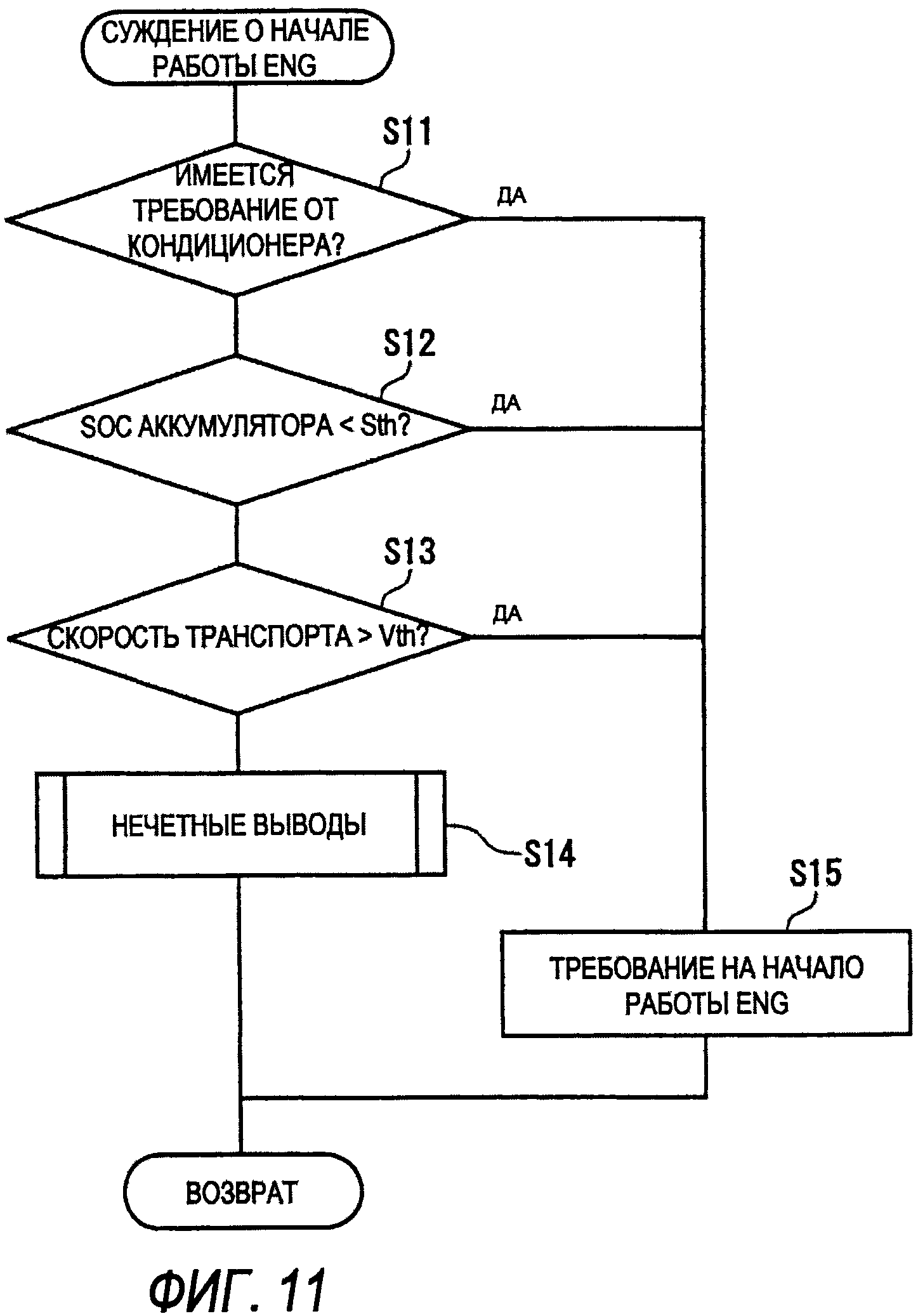
Фиг.11 - блок-схема, которая показывает процедуры вынесения суждения о начале работы двигателя внутреннего сгорания.
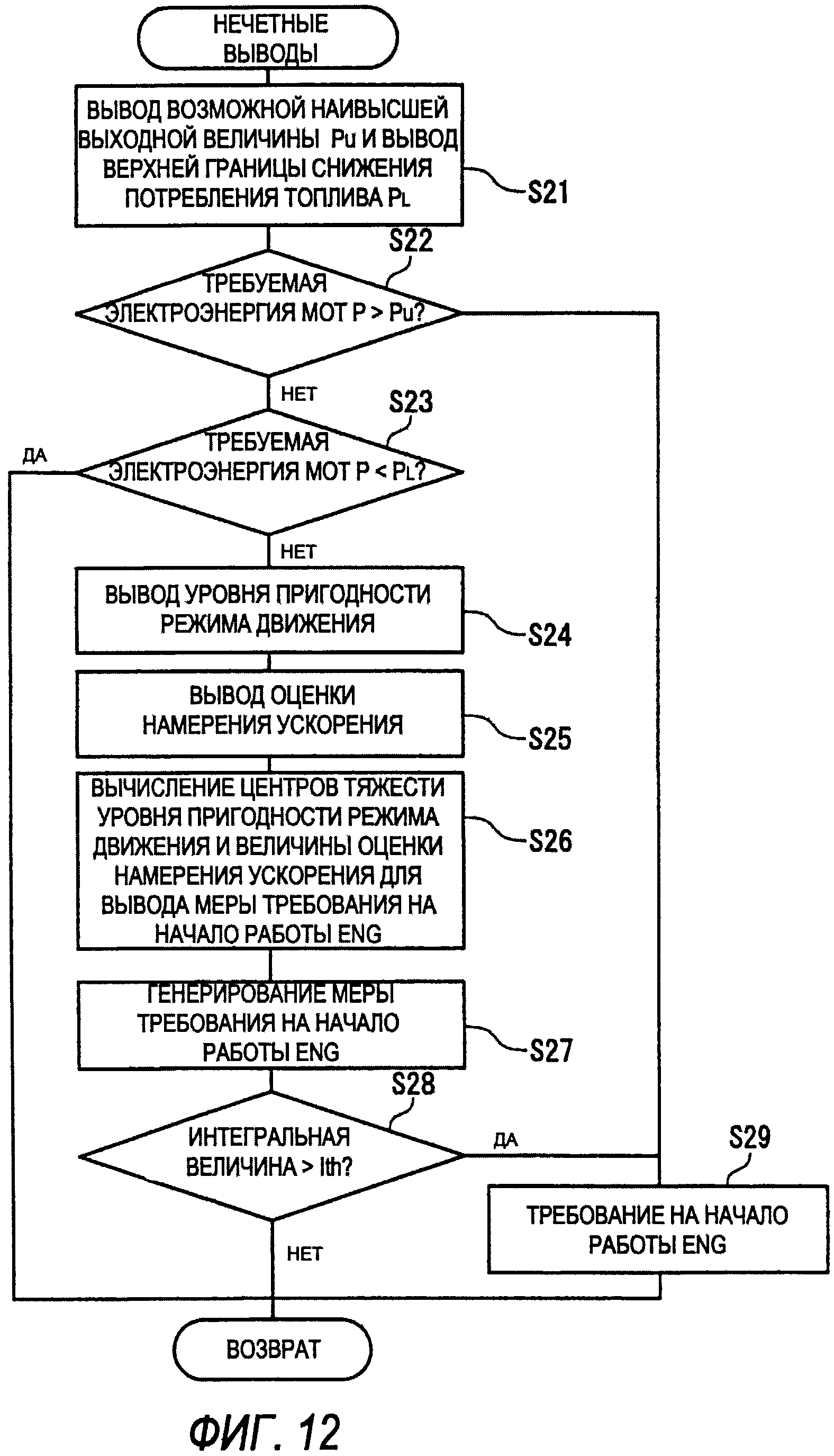
Фиг.12 - блок-схема, которая показывает процедуры нечетких выводов.
Формы осуществления изобретения
Далее будут описаны примеры осуществления настоящего изобретения со ссылками на прилагаемые чертежи. Заметим, что фигуры чертежей следует рассматривать в порядке следования ссылок.
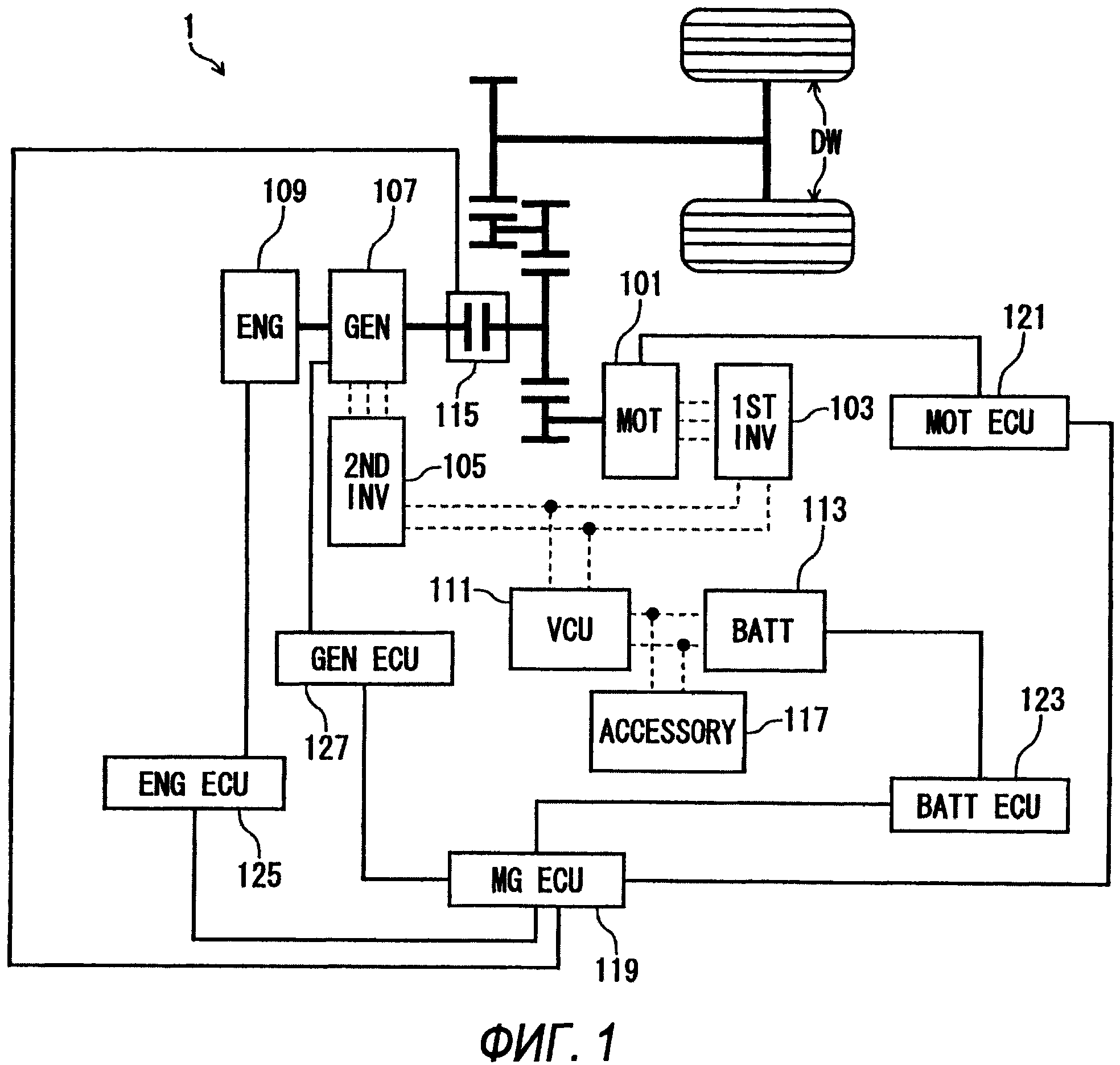
HEV (гибридное электрическое транспортное средство) содержит электродвигатель и двигатель внутреннего сгорания и приводится в движение движущей силой электродвигателя или двигателя внутреннего сгорания, что зависит от условий движения транспортного средства. На Фиг.1 показана внутренняя конфигурация HEV (в дальнейшем именуется просто как "транспортное средство") настоящего примера осуществления. Как показано на Фиг.1, транспортное средство 1 настоящего примера осуществления содержит левое и правое ведущие колеса DW, DW, электродвигатель (МОТ) 101, первый инвертор (1st INV) 103, второй инвертор (2nd INV) 105, электрогенератор (GEN) 107, двигатель внутреннего сгорания (ENG) 109, двунаправленный преобразователь напряжения (VCU) (в дальнейшем именуемый просто как "преобразователь") 111, аккумуляторную батарею (ВАТТ) 113, муфту сцепления (в дальнейшем именуемую просто как "муфта") 115, вспомогательное оборудование (ACCESSORY) 117, блок управления ECU (MG ECU) 119, ECU электродвигателя (МОТ ECU) 121, ECU аккумуляторной батареи (ВАТТ ECU) 123, ECU двигателя внутреннего сгорания (ENG ECU) 125 и ECU электрогенератора (GEN ECU) 127.
Электродвигатель 101 представляет собой, например, трехфазный двигатель переменного тока. Электродвигатель 101 генерирует механическую энергию (механический момент), необходимую для передвижения транспортного средства. Механический момент, создаваемый электродвигателем 101, передается на ведущие колеса DW, DW. Когда во время замедления транспортного средства на электродвигатель 101 через ведущие валы передается движущая сила от ведущих колес DW, DW, то электродвигатель 101 работает как электрогенератор, генерирует так называемую рекуперативную тормозную силу и восстанавливает кинетическую энергию транспортного средства в виде электрической энергии (рекуперативная энергия), заряжая тем самым аккумуляторную батарею 113. ECU электродвигателя 121 управляет работой и состоянием электродвигателя 101 в соответствии с командой от блока управления ECU 119.
В состоянии, когда муфта 115 отсоединена, многоцилиндровый двигатель внутреннего сгорания (в дальнейшем именуемый просто как "двигатель внутреннего сгорания") 109 обеспечивает генерацию электрической энергии электрогенератором 107 за счет движущей силы двигателя внутреннего сгорания 109. В состоянии, когда муфта 115 подсоединена, двигатель внутреннего сгорания 109 генерирует энергию (механический момент), необходимую для передвижения транспортного средства. Механический момент, создаваемый двигателем внутреннего сгорания 109 при подсоединенной муфте 115, передается через электрогенератор 107 и муфту 115 на ведущие валы ведущих колес DW, DW. ECU двигателя внутреннего сгорания 125 управляет началом работы и остановом, а также скоростью вращения двигателя внутреннего сгорания 109 в соответствии с командами от блока управления ECU 119.
Электрогенератор 107 приводится в движение двигателем внутреннего сгорания 109 и генерирует электрическую энергию. Напряжение переменного тока, сгенерированное электрогенератором 107, преобразуется в напряжение постоянного тока вторым инвертором 105. Напряжение постоянного тока, преобразованное вторым инвертором 105, понижается преобразователем 111, а затем запасается в аккумуляторной батарее 113 или же преобразуется в напряжение переменного тока посредством первого инвертора 103, после чего поступает на электродвигатель 101. ECU электрогенератора 127 управляет скоростью вращения электрогенератора 117 и величиной электрической энергии, генерируемой электрогенератором 107 в соответствии с командами от блока управления ECU 119.
Аккумуляторная батарея 113 имеет несколько аккумуляторных элементов, которые соединены последовательно и предоставляют высокое напряжение, например, от 100 В до 200 В. Напряжение аккумуляторной батареи 113 повышается преобразователем 111 и подается на первый инвертор 103. Первый инвертор 103 преобразует напряжение постоянного тока от аккумуляторной батареи 113 в напряжение переменного тока и подает трехфазный ток на электродвигатель 101. От датчиков (не показаны) на ECU аккумуляторной батареи 123 вводится информация по величине SOC и температуре аккумуляторной батареи 123. Эти элементы информации посылаются на блок управления ECU 119.
Муфта 115, базируясь на командах от блока управления ECU 119, отсоединяет или подсоединяет (отсоединяет/подсоединяет) линию передачи движущей силы от двигателя внутреннего сгорания 109 к ведущим колесам DW, DW. Если муфта 115 отсоединена, то движущая сила от двигателя внутреннего сгорания 109 не передается на ведущие колеса DW, DW, если же муфта 115 подсоединена, то движущая сила от двигателя внутреннего сгорания 109 передается на ведущие колеса DW, DW.
В состав вспомогательного оборудования входит, например, компрессор кондиционера для управления температурой в пассажирском салоне, оборудование аудио и лампы освещения, и это оборудование работает от электрической энергии, которая подается от аккумуляторной батареи 113. Потребляемая вспомогательным оборудованием 117 электроэнергия контролируется датчиками (не показаны), а информация о потребляемой электроэнергии посылается затем на блок управления ECU 119.
Блок управления ECU 119 переключает системы передачи движущей силы, осуществляет управление и мониторинг работы электродвигателя 101, первого инвертора 103, второго инвертора 105, двигателя внутреннего сгорания 109 и вспомогательного оборудования 117. Кроме того, на блок управления ECU 119 поступает информация о скорости транспортного средства от датчика скорости транспортного средства (не показан), информация о степени открытия педали акселератора (величина открытия АР) (не показан), информация об усилии на тормозной педали (не показана), а также информация о диапазоне переключения коробки передач и информация от экологического переключателя. Блок управления ECU 119 выдает команды на ECU электродвигателя 121, ECU аккумуляторной батареи 123, ECU двигателя внутреннего сгорания 125 и ECU электрогенератора 127.
Транспортное средство 1, которое имеет подобную конфигурацию, может перемещаться при различных режимах движения, таких, например, как "режим движения EV", "последовательный режим движения" и "двигательный режим движения", используя для этого различные движущие источники, что зависит от соответствующих условий движения транспортного средства. Далее здесь будут описаны соответствующие режимы движения, при которых может перемещаться транспортное средство 1.
В режиме движения EV электродвигатель 101 приводится в движение только электрической энергией от аккумуляторной батареи 113, что обеспечивает тем самым вращение ведущих колес DW, DW и перемещение транспортного средства 1. В этом случае двигатель внутреннего сгорания 109 не работает, а муфта 115 отсоединена.
В последовательном режиме движения электрогенератор 107 вырабатывает электрическую энергию, используя механическую энергию двигателя внутреннего сгорания 109, а электроэнергией, которая вырабатывается электрогенератором 107, приводится во вращение электродвигатель 101, что обеспечивает тем самым вращение ведущих колес DW, DW и перемещение транспортного средства 1. В этом случае муфта 115 также отсоединена. В этот последовательный режим движения входит "режим нулевого входа/выхода аккумуляторной батареи", "режим движения при зарядке" и "поддерживающий режим".
В режиме нулевого входа/выхода аккумуляторной батареи электрическая энергия, сгенерированная в электрогенераторе 107 с использованием механической энергии двигателя внутреннего сгорания 109, подается непосредственно на электродвигатель 101 через второй инвертор 105 и первый инвертор 103 для вращения электродвигателя 101, который тем самым обеспечивает вращение ведущих колес DW, DW и перемещение транспортного средства 1. А именно, электрогенератор 107 генерирует только ту часть электроэнергии, которая соответствует требуемой электроэнергии, и, по существу, в аккумуляторную батарею 113 не поступает электроэнергия и не выдается из нее.
В режиме движения при зарядке электроэнергия, сгенерированная в электрогенераторе 107 с использованием механической энергии от двигателя внутреннего сгорания 109, подается непосредственно на электродвигатель 101 для вращения электродвигателя 101, который тем самым обеспечивает вращение ведущих колес DW, DW и перемещение транспортного средства 1. В то же самое время электроэнергия, сгенерированная в электрогенераторе 107 с использованием механической энергии от двигателя внутреннего сгорания 109, поступает на аккумуляторную батарею 113 и заряжает аккумуляторную батарею 113. А именно, в данном случае электрогенератор 107 вырабатывает больше электроэнергии, чем требуемая электроэнергия, которая необходима для электродвигателя 101. Таким образом, на электродвигатель 101 подается электроэнергия, соответствующая требуемой электроэнергии, в то время как оставшаяся электроэнергия поступает на аккумуляторную батарею 113 и сохраняется в ней.
В случае, когда требуемая электроэнергия, которая необходима для электродвигателя 101, превышает электроэнергию, которая может быть сгенерирована электрогенератором 107, транспортное средство 1 перемещается в поддерживающем режиме. В поддерживающем режиме как электроэнергия, которая сгенерирована в электрогенераторе 107 с использованием механической энергии от двигателя внутреннего сгорания 109, так и электроэнергия от аккумуляторной батареи 113 подается на электродвигатель 101 для вращения электродвигателя 101, который тем самым обеспечивает вращение ведущих колес DW, DW и перемещение транспортного средства 1.
В двигательном режиме движения муфта 115 подсоединяется в соответствии с командой, поступающей от блока управления ECU 119, ведущие колеса DW, DW приводятся во вращение непосредственно энергией двигателя внутреннего сгорания 109 и тем самым перемещается транспортное средство 1.
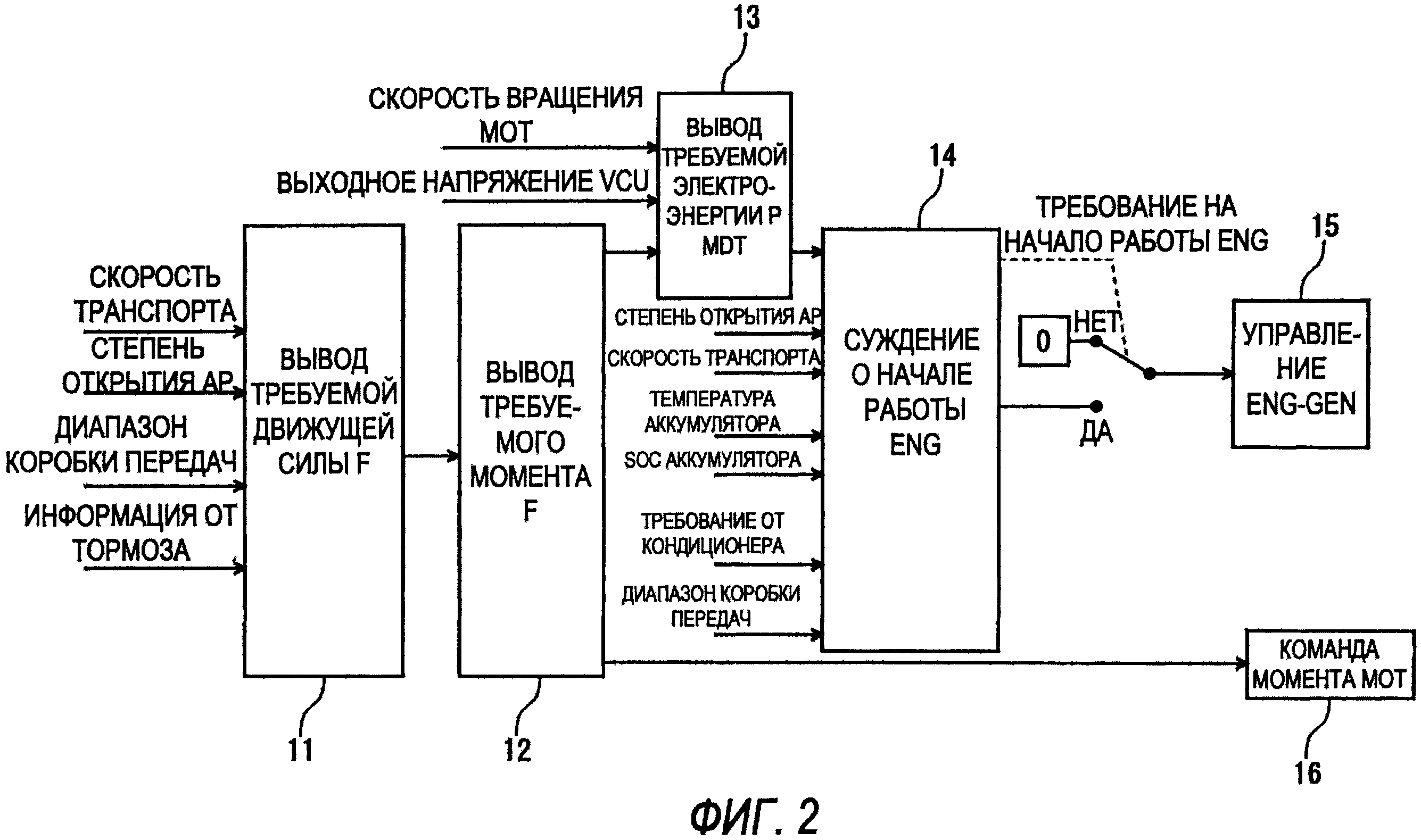
При переключении этих режимов движения устройство управления гибридного транспортного средства в соответствии с примером осуществления изобретения выносит суждение о том, какой из режимов движения - режим движения EV или последовательный режим движения - лучше соответствует текущим условиям движения транспортного средства 1, базируясь на требуемой электроэнергии, которая необходима для электродвигателя 101, которая, в свою очередь, соответствует требуемой движущей силе, необходимой для транспортного средства 1. Затем в случае, когда устройство управления выносит суждение, что последовательный режим движения лучше соответствует упомянутым условиям, чем режим движения EV, устройство управления начинает работу двигателя внутреннего сгорания 109 и переключает режим движения из режима движения EV на последовательный режим движения. Далее здесь будут подробно описаны вывод суждения о начале движения двигателя внутреннего сгорания 109 и управление переключением режимов движения. На Фиг.2 показывается подробная конфигурация устройства управления гибридного транспортного средства, представленного на Фиг.1.
Сначала блок управления ECU 119 выводит требуемую движущую силу F, которая необходима электродвигателю 101 для перемещения транспортного средства, базируясь на такой информации, как степень открытия педали акселератора, скорость транспортного средства, позиция переключения в коробке передач, усилие на тормозной падали (блок вывода требуемой движущей силы 11). Вслед за этим блок управления ECU 119 выводит требуемый механический момент Т, который необходим для электродвигателя 101, базируясь на величине, полученной при пропускании величины выведенной требуемой движущей силы F через не показанный здесь фильтр низких частот (блок вывода требуемого момента МОТ 12).
Затем блок управления ECU 119 выводит требуемую электроэнергию P, которая необходима для электродвигателя 101, базируясь на требуемом механическом моменте Т, который необходим для электродвигателя 101, напряжении (выходное напряжение VCU), которое получается после его повышения преобразователем 111, и текущей скорости вращения электродвигателя 101 (скорость вращения МОТ) (блок вывода требуемой электроэнергии 13).
На Фиг.3 показывается подробная конфигурация блока вывода требуемой электроэнергии 13. При выводе требуемой электроэнергии, которая необходима для электродвигателя 101, блок управления ECU 119 выводит команду выходной величины на валу МОТ, являющейся выходной величиной, которая должна быть выдана электродвигателем 101, базируясь на требуемом механическом моменте и скорости вращения электродвигателя 101 (блок вывода команды выходной величины на валу МОТ 21). Команда выходной величины на валу МОТ выводится с использованием следующего выражения (1):
команда выходной величины на валу МОТ (кВт) = требуемый механический момент МОТ (Н) × скорость вращения МОТ (об/мин) × 2π/60… (1)
Кроме того, блок управления ECU 119 выводит потери, возникающие в электродвигателе 101, базируясь на требуемом механическом моменте Т, который необходим для электродвигателя 101, скорости вращения электродвигателя 101 и выходном напряжении VCU, используя для этого поиск в таблице потерь, которая хранится в не показанной здесь памяти (блок вывода потерь электродвигателя 22). В эти потери электродвигателя входят все потери, которые могут при этом возникнуть, такие как потери на переключение и тепловые потери, а также потери, возникающие в преобразователе.
Затем блок управления ECU 119 выводит требуемую электроэнергию P, необходимую для электродвигателя 101, в состав которой входит электроэнергия, соответствующая потерям электродвигателя и полученная суммированием всех потерь на валу электродвигателя, и выводит команду выходной величины на валу электродвигателя (блок вывода требуемой электроэнергии 23).
Обратившись снова к Фиг.2, видно, что блок управления ECU 119 выносит суждение о том, начинать или не начинать работу двигателя внутреннего сгорания 109, базируясь на выведенной требуемой электроэнергии P, которая необходима для электродвигателя 101 (блок суждения о начале работы ENG 14). В случае, когда имеется требование на начало работы двигателя внутреннего сгорания 109 (называемое далее также как требование на начало работы ENG), то блок управления ECU 119 осуществляет управление двигателем внутреннего сгорания 109 и электрогенератором 107 (блок управления ENG-GEN 15).
На Фиг.4 показывается подробная конфигурация блока управления ENG-GEN 15. Сначала блок управления ECU 119 выводит выходную величину требуемой генерируемой электроэнергии МОТ, представляющую собой выходную величину электроэнергии, которая должна быть сгенерирована генератором 107 и представляет собой электроэнергию, соответствующую требуемой электроэнергии электродвигателя 101, базируясь при этом на требуемой электроэнергии P, которая необходима для электродвигателя 101, и напряжении (выходное напряжение VCU), которое было для этой цели повышено преобразователем 111 (блок вывода требуемой генерируемой электроэнергии МОТ 31).
Для аккумуляторной батареи 113 задается величина SOC, которая должна быть достигнута (заданная величина SOC) и до которой желательно зарядить аккумуляторную батарею 113 в случае, когда текущая величина SOC находится ниже, чем заданная величина SOC. Поэтому блок управления ECU 119 выводит требуемую выходную величину заряда, которая соответствует зарядной емкости, необходимой для достижения заданной величины SOC, базируясь на текущей величине SOC аккумуляторной батареи 113 (блок вывода требуемой величины заряда 32). Затем блок управления ECU 119 выводит требуемую выходную величину генерируемой электроэнергии суммированием требуемой выходной величины генерируемой электроэнергии МОТ и требуемой выходной величины заряда (блок вывода требуемой генерируемой электроэнергии 33).
Блок управления ECU 119 выводит заданную величину скорости вращения двигателя внутреннего сгорания 109, которая соответствует требуемой выходной величине генерируемой электроэнергии, вычисленной в результате поиска в таблице BSFC (Brake Specific Fuel Consumption - Потребление топлива, специфичное для торможения), относящейся к скорости вращения двигателя внутреннего сгорания 109, базируясь на требуемой выходной величине генерируемой электроэнергии (блок вывода заданной величины скорости вращения ENG 34). Эта заданная величина скорости вращения ENG является той скоростью вращения, при которой обеспечивается наилучший коэффициент полезного действия потребления топлива, соответствующего требуемой выходной величине генерируемой электроэнергии. Однако в двигателе внутреннего сгорания 109 величина впрыска топлива определяется главным образом в соответствии с величиной всасываемого воздуха и поэтому трудно управлять таким образом, чтобы скорость вращения двигателя внутреннего сгорания 109 совпадала бы с заданной величиной скорости вращения. Далее скорость вращения и момент электрогенератора 107, который соединен с коленчатым валом (не показан) двигателя внутреннего сгорания 109, управляются ECU электрогенератора 127 так, чтобы обеспечивалось управление величиной электроэнергии, генерируемой электрогенератором 107 и тем самым - управление скоростью вращения двигателя внутреннего сгорания 109. Следовательно, заданная величина скорости вращения ENG преобразуется в скорость вращения электрогенератора 107 (блок преобразования скорости вращения GEN 35), осуществляется управление вращением электрогенератора 107 (блок управления вращением GEN 36), а команда момента GEN посылается на ECU электрогенератора 127 (блок команды момента GEN 37).
Блок управления ECU 119 выводит заданную величину механического момента двигателя внутреннего сгорания 109, которая соответствует требуемой выходной величине генерируемой электроэнергии, используя для этого поиск в таблице BSFC (потребление топлива, специфичное для торможения), относящейся к механическому моменту двигателя внутреннего сгорания 109, базируясь на выведенной требуемой выходной величине генерируемой электроэнергии (блок вывода заданного момента ENG 38). Блок управления ECU 119 пересылает команду механического момента ENG на ECU двигателя внутреннего сгорания 125, базируясь на выведенной величине заданного момента ENG (блок команды момента ENG 39). Затем блок управления ECU 119 управляет величиной открытия дросселя, базируясь на выведенной величине заданного механического момента, текущей скорости вращения двигателя внутреннего сгорания 109 и величине всасываемого воздуха, оцененной исходя из величины заданного механического момента и текущей скорости вращения (блок управления открытием ТН 40). Блок управления ECU 119 осуществляет управление DBW (управление тросом), базируясь на выведенной команде открытия дросселя (блок команды открытия ТН 41) (блок DBW 42).
Обратившись снова к Фиг.2, видно, что когда блоком суждения о начале работы ENG 14 не выдается команда начала работы ENG, двигатель внутреннего сгорания 109 не запускается, и электроэнергия от аккумуляторной батареи 113 подается на электродвигатель 101, тем самым транспортное средство перемещается в режиме движения EV. Следовательно, двигатель внутреннего сгорания 109 и электрогенератор 107 не управляются.
Безотносительно к наличию команды начала движения ENG блок управления ECU 119 посылает команду механического момента электродвигателя 101 на ECU электродвигателя 121 исходя из требуемого момента Т, который выведен в блоке вывода требуемого момента МОТ 11 (блок команды момента МОТ 16). ECU электродвигателя 121 управляет электродвигателем 101, базируясь на команде момента МОТ.
На Фиг.5 показывается подробная конфигурация блока суждения о начале работы ENG 14. Здесь блок управления ECU 119 выносит суждение о том, что требование на начало движения двигателя внутреннего сгорания 109 выдается в случае, когда удовлетворяется по меньшей мере одно из условий, которые будут описаны позднее (блок требования начала движения ENG 57). Далее здесь будут подробно описаны эти условия.
Сначала, в случае наличия требования на кондиционирование воздуха, такого как требование на охлаждение или нагревание пассажирского салона, электроэнергия в аккумуляторной батарее 113 потребляется в большом количестве, и необходимость в запуске двигателя внутреннего сгорания 109, будет высокой, поскольку тепло, которое создается двигателем внутреннего сгорания 109 будет теперь использоваться для нагревания пассажирского салона. Следовательно, в случае, когда появилось требование на кондиционирование воздуха, такое как требование на нагревание или охлаждение пассажирского салона, выносится суждение о том, что существует требование на начало движения двигателя внутреннего сгорания 109 (блок вывода требования на кондиционирование 51).
Далее в случае, когда величина SOC аккумуляторной батареи 113 является чрезвычайно низкой, от аккумуляторной батареи 113 не может быть получена достаточная выходная величина, и, следовательно, будет трудно перемещать транспортное средство в режиме движения EV. Таким образом, необходимость в проведении подзарядки аккумуляторной батареи 113, запустив для этого двигатель внутреннего сгорания 109, будет высокой. Следовательно, в случае, когда величина SOC аккумуляторной батареи 113 является более низкой, чем заранее заданная пороговая величина Sth, то выносится суждение, что существует требование на запуск двигателя внутреннего сгорания 109 (блок вывода низкой величины SOC 52). В этом случае для предотвращения частого возникновения запуска и останова двигателя внутреннего сгорания 109 вынесение суждения проводится исходя из порога, который имеет постоянную ширину петли гистерезиса.
Кроме того, в случае, когда транспортное средство перемещается при высокой скорости, которая равна или превышает заранее заданную скорость, требуемая движущая сила, которая необходима для транспортного средства, является высокой, и будет трудно перемещать транспортное средство в режиме движения EV. Таким образом, необходимость в запуске двигатель внутреннего сгорания 109 является высокой, и при этом транспортное средство будет перемещаться в последовательном режиме движения, является высокой. Следовательно, в случае, когда скорость транспортного средства является более высокой, чем заранее заданная пороговая величина Vth (блок вывода высокой скорости транспортного средства 53), выносится суждение, что существует требование на начало работы двигателя внутреннего сгорания 109. В этом случае также для предотвращения частого возникновения запуска и останова двигателя внутреннего сгорания 109 вынесение суждения проводится исходя из порога, который имеет постоянную ширину петли гистерезиса.
Даже в случае, когда ни одно из рассмотренных выше условий не удовлетворяется, проводится процедура нечетких выводов, базирующаяся на оценивании уровня пригодности режима движения в зависимости от потребления топлива и оценивании намерения ускорения в зависимости от намерения водителя по ускорению (блок нечетких выводов 54). Когда из проведенных нечетких выводов выводится суждение, что последовательный режим движения подходит лучше, чем режим движения EV, то принимается, что существует требование на начало работы двигателя внутреннего сгорания 109. В дальнейшем эти нечеткие выводы будут описаны подробно.
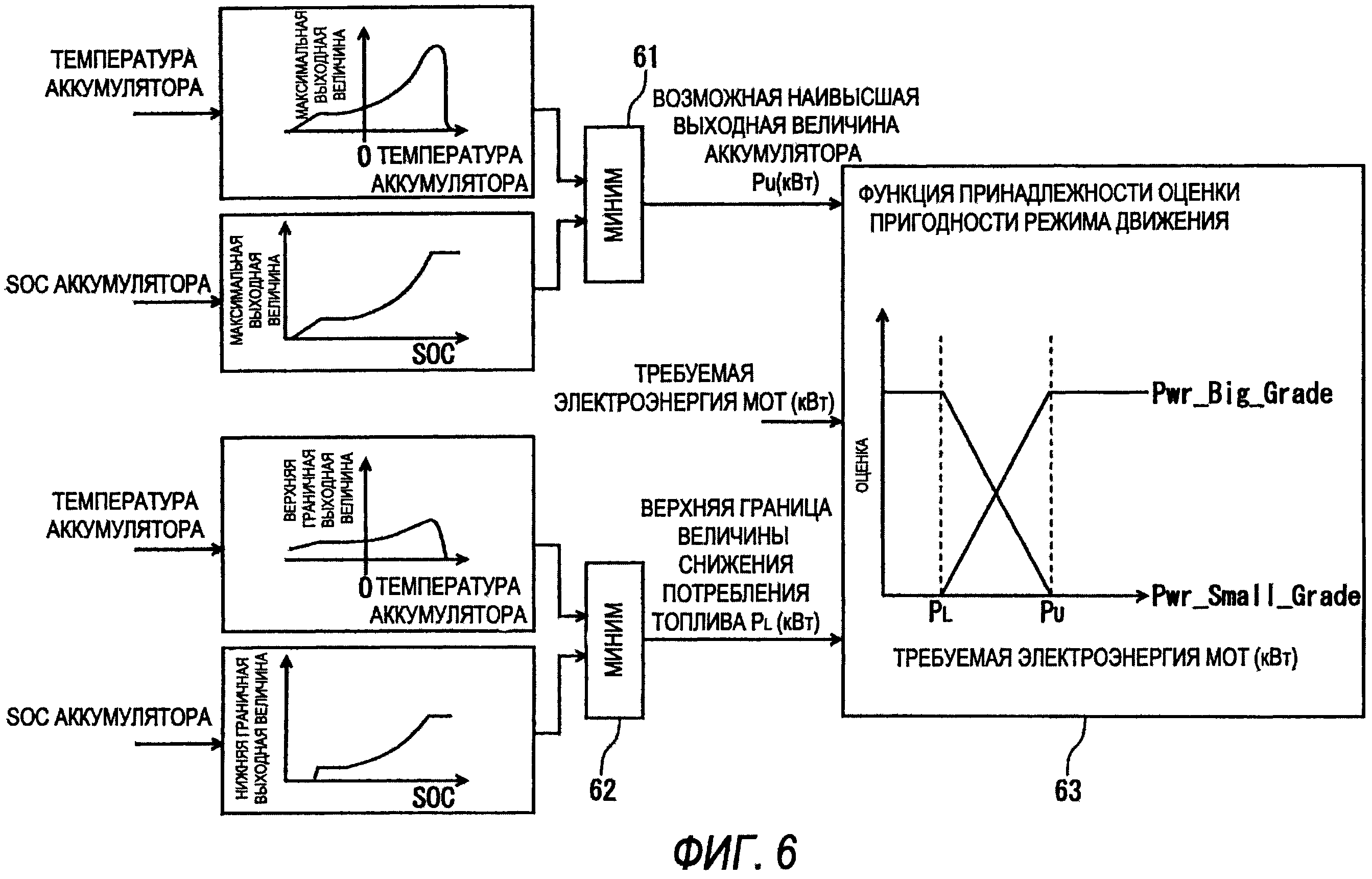
На Фиг.6 показывается оценивание пригодности режима движения в блоке нечетких выводов 54. Сначала блок управления ECU 119 задает возможную наивысшую выходную величину Pu аккумуляторной батареи 113 и верхнюю граничную выходную величину снижения потребления топлива PL на базе величины SOC и температуры аккумуляторной батареи 113.
Возможная наивысшая выходная величина Pu аккумуляторной батареи 113 является верхней граничной величиной электроэнергии, которую может выдавать аккумуляторная батарея 113, и она изменяется в соответствии с величиной SOC и температурой аккумуляторной батареи 113. Следовательно, блок управления ECU 119 выводит максимальные значения электроэнергии, которые может выдавать аккумуляторная батарея 113 исходя из соответствующих значений величины SOC и температуры аккумуляторной батареи 113. Затем блок управления ECU 119 задает меньшую величину из вычисленных таким образом значений, как возможную наивысшую выходную величину PU аккумуляторной батареи 113 (блок задания возможной наивысшей выходной величины 61). Данные, касающиеся значений максимальной электроэнергии, которую может выдавать аккумуляторная батарея 113 в соответствии с величиной SOC и температурой аккумуляторной батареи 113, получаются заранее по результатам экспериментов и хранятся в памяти (не показана).
В отличие от этого, верхняя граничная выходная величина снижения потребления топлива PL является граничной величиной, которая находится между областью, где улучшению потребления топлива более способствует перемещение в режиме движения EV, и областью, где оптимизации потребления топлива более способствует перемещение в режиме движения с нулевым входом/выходом аккумуляторной батареи. Эта величина задается следующим способом.
В режиме движения EV транспортное средство перемещается за счет питания электродвигателя 101 электроэнергией от аккумуляторной батареи 113. В этом случае потери возникают тогда, когда напряжение постоянного тока аккумуляторной батареи 113 преобразуется в первом инверторе 103 в напряжение переменного тока, а также потери возникают тогда, когда приводится в движение электродвигатель 101. Кроме того, при передаче электроэнергии от аккумуляторной батареи 113 понижается величина SOC аккумуляторной батареи 113. Уровень пониженной таким образом величины SOC необходимо будет в некоторый момент времени в будущем восстановить до исходного уровня генерацией электроэнергии, используя для этого механическую энергию двигателя внутреннего сгорания 109. Потери также возникают, когда электрогенератор 107 генерирует электроэнергию, используя механическую энергию двигателя внутреннего сгорания 109 для восстановления уровня величины SOC аккумуляторной батареи 113 до его исходного уровня. Следовательно, полные потери LEV, которые возникают в режиме движения EV, являются суммой потерь, возникающих тогда, когда от аккумуляторной батареи 113 подается электроэнергия на электродвигатель 101, потерь, возникающих тогда, когда приводится в движение электродвигатель 101, и потерь, возникающих тогда, когда электрогенератор 107 генерирует позднее электроэнергию.
В отличие от этого, в режиме нулевого входа/выхода аккумуляторной батареи электрогенератор 107, используя механическую энергию двигателя внутреннего сгорания 109, генерирует только ту часть электроэнергии, которая соответствует требуемой электроэнергии, и электродвигатель 101 приводится в движение сгенерированной таким образом электроэнергией, обеспечивая тем самым передвижение транспортного средства. Потери соответственно возникают тогда, когда электрогенератор 107 генерирует электроэнергию за счет механической энергии двигателя внутреннего сгорания 109, и тогда, когда приводится в движение электродвигатель 101. Следовательно, полные потери LSE, которые возникают в режиме нулевого входа/выхода аккумуляторной батареи, являются суммой потерь, возникающих тогда, когда электрогенератор 107 генерирует электроэнергию, и потерь, возникающих тогда, когда приводится в движение электродвигатель 101.
Блок управления ECU 119, базируясь на соответствующих значениях величины SOC и температуры аккумуляторной батареи 113, выводит верхние граничные выходные величины аккумуляторной батареи 113, такие, что величина полных потерь LEV, которые возникают в режиме движения EV, не будет превосходить полных потерь LSE, которые возникают в режиме нулевого входа/выхода аккумуляторной батареи. Затем блок управления ECU 119 задает меньшую величину из выведенных подобным образом верхних выходных граничных величин в качестве верхней граничной выходной величины снижения потребления топлива PL (блок задания верхней граничной выходной величины снижения потребления топлива 62). Данные, которые относятся к верхней граничной выходной величине, соответствующей величине SOC и температуре аккумуляторной батареи 113, такие, что при этом величина LEV не превышает величины LSE, определяются заранее в экспериментах и хранятся в не показанной здесь памяти.
На Фиг.7 показывается возможная наивысшая выходная величина PU и верхняя граничная выходная величина снижения потребления топлива PL. На этом чертеже на оси абсцисс находится скорость транспортного средства (км/ч), а на оси ординат - движущая сила (N). Знаками R/L на этом рисунке показывается сопротивление движению по плоской земле или дороге.
А именно, когда требуемая электроэнергия P > возможной наивысшей выходной величины PU, то есть находится в области (С) на Фиг.7, то требуемая электроэнергия P не может быть предоставлена только одной аккумуляторной батареей 113. Следовательно, в области (С) транспортное средство не может перемещаться в режиме движения EV, и поэтому блок управления ECU 119 осуществляет управление таким образом, что запускается двигатель внутреннего сгорания 109, обеспечивая тем самым перемещение транспортного средства в последовательном режиме движения.
Когда требуемая электроэнергия P < верхней граничной выходной величины снижения потребления топлива PL, то есть находится в области (А) на Фиг.7, то требуемая электроэнергия не будет слишком большой, и следовательно, потребление электроэнергии от аккумуляторной батареи 113 также не будет слишком большим. Кроме того, электроэнергия, которая позднее должна быть сгенерирована, также не будет слишком большой. Следовательно, возникающие потери соответственно также не будут слишком большими, что приводит к тому, что LEV<LSE. Следовательно, с позиции потребления топлива предпочтительно, чтобы в области (А) транспортное средство перемещалось бы в режиме движения EV, и поэтому блок управления ECU 119 осуществляет управление так, что транспортное средство будет перемещаться в режиме движения EV без запуска двигателя внутреннего сгорания 109.
Когда верхняя граничная выходная величина снижения потребления топлива PL ≤ требуемой электроэнергии P ≤ возможной наивысшей выходной величины PU, а именно в области (В), и поскольку требуемая электроэнергия P не превосходит возможную наивысшую выходную величину PU, то требуемая электроэнергия P может быть предоставлена только электроэнергией от аккумуляторной батареи 113, и поэтому транспортное средство может перемещаться в режиме движения EV. Однако требуемая электроэнергия P является относительно большой, и поэтому потребление электроэнергии от аккумуляторной батареи 113 также становится относительно большим, и, кроме того, электроэнергия, которая позднее должна будет сгенерирована, также становится большой, что приводит в результате к тому, что LEV≥LSE. По этой причине желательно, чтобы с позиции потребления топлива транспортное средство в области (В) перемещалось бы в последовательном режиме движения. Однако в случае, когда запуск двигателя внутреннего сгорания 109 будет производиться непосредственно после того, как для требуемой электроэнергии станет выполняться условие P≥PL, будет возникать опасность частого переключения управления. Исходя из этого в случае, когда верхняя граничная выходная величина снижения потребления топлива PL ≤ требуемой электроэнергии P ≤ возможной наивысшей выходной величины PU, блок управления ECU 119 осуществляет процедуру нечетких выводов.
Обратившись снова к Фиг.6, видно, что блок управления ECU 119 задает функцию принадлежности оценки пригодности режима движения из возможной наивысшей выходной величины PU аккумуляторной батареи 113 и верхней граничной выходной величины снижения потребления топлива PL. Затем из следующих продукционных правил управления выводится уровень пригодности режима движения при текущей требуемой электроэнергии P (блок вывода уровня пригодности режима движения 63).
<Продукционные правила управления>
(1) Если требуемая электроэнергия МОТ является меньше чем PL, то уровень пригодности последовательного режима движения является высоким, и
(2) Если требуемая электроэнергия МОТ является больше чем PL, то уровень пригодности последовательного режима движения является низким.
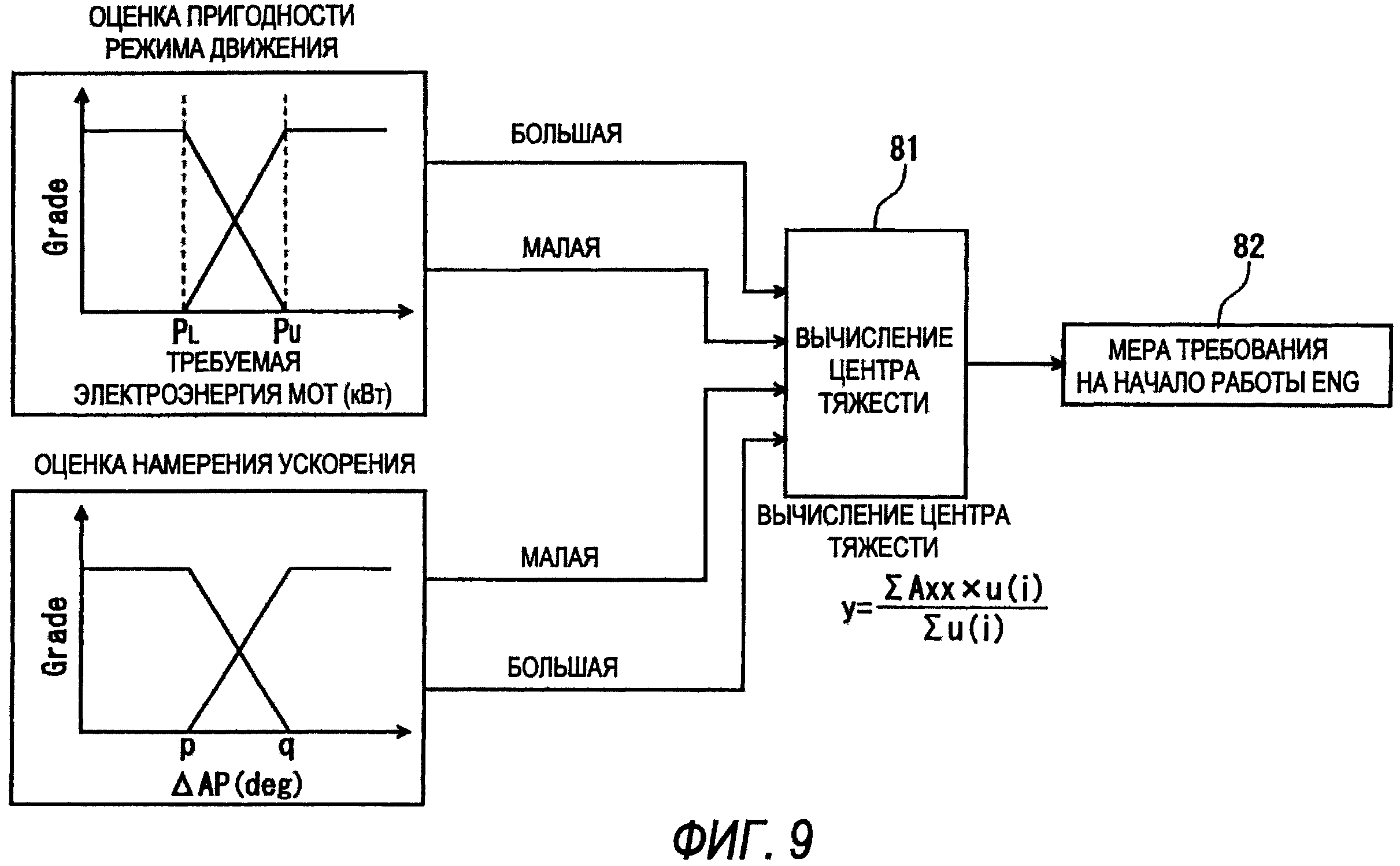
На Фиг.8 показывается оценка намерения ускорения в блоке нечетких выводов 54. Сначала блок управления ECU 119 выводит величину дифференциала степени открытия педали акселератора АР. Затем блок управления ECU 119 выводит показатель изменения по времени степени открытия педали акселератора ДАР посредством пропускания этой величины дифференциала через не показанный на рисунке фильтр нижних частот (блок вывода ΔAP 71). Затем из функции принадлежности оценки намерения ускорения в зависимости от заранее заданной величины ΔAP и в соответствии с продукционными правилами управления, приведенными далее, выводится величина оценки намерения ускорения в зависимости от текущей величины ΔAP (блок вывода оценки намерения ускорения 72). Заметим, что значения p, q задаются в соответствии с экспериментами.
<Продукционные правила управления>
(1) Если величина ΔAP является меньше, чем p, то намерение ускорения является малым, и
(2) Если величина ΔAP является больше, чем q, то намерение ускорения является большим.
На Фиг.9 показывается вывод меры требования на начало работы ENG блоком нечетких выводов 54. Блок управления ECU 119 осуществляет вычисление центра тяжести уровня пригодности режима движения и величины оценки намерения ускорения (блок вычисления центра тяжести 81) и выводит меру требования на начало работы ENG (блок вычисления меры требования на запуск ENG 82). Эта мера требования на начало движения ENG может иметь произвольное значение между - 1 и 1.
Обратившись снова к Фиг.5, видно, что блок управления ECU 119 осуществляет интегрирование меры требования на начало движения ENG, выведенной блоком нечетких выводов 54 (блок интегрирования 55). Интегрирование меры требования на начало движения ENG осуществляется так, что значение этой меры находится в диапазоне от 0 до 1. В случае, когда вычисленное таким образом значение интеграла будет выше, чем заранее заданная пороговая величина Ith, то выносится суждение, что существует требование на запуск двигателя внутреннего сгорания 109 (блок суждения о значении интеграла 56). В этом случае для предотвращения частых событий запуска и останова двигателя внутреннего сгорания 109 суждение также осуществляется на базе пороговой величины, которая имеет заранее заданную ширину петли гистерезиса. При использовании интегральной величины меры требования на начало движения ENG суждение о запуске двигателя внутреннего сгорания 109 может быть вынесено только в том случае, если увеличение или уменьшение требуемой электроэнергии или степени открытия педали акселератора носят не краткосрочный характер, а являются постоянными. Поэтому тем самым с большей вероятностью можно гарантировать предотвращение частых событий запуска и останова двигателя внутреннего сгорания 109.
Далее будет подробно описана работа устройства управления гибридного транспортного средства в соответствии с настоящим примером осуществления. На Фиг.10 показывается блок-схема процедур устройства управления гибридного транспортного средства 1 в соответствии с настоящим примером осуществления. Сначала блок правления ECU 119 выводит требуемую движущую силу F, необходимую для электродвигателя 101 (этап S1), а затем выводит требуемый механический момент Т, необходимый для электродвигателя 101 (требуемый момент МОТ), базируясь на выведенной требуемой движущей силе F (этап S2). Вслед за этим блок управления ECU 119 выводит требуемую электроэнергию P, необходимую для электродвигателя 101 (требуемая электроэнергия МОТ), базируясь на требуемом механическом моменте МОТ, скорости вращения МОТ и выходном напряжении VCU (этап S3). Блок управления ECU 119, базируясь на этой требуемой электроэнергии МОТ P, выводит суждение о том, начинать или не начинать работу двигателя внутреннего сгорания 109 (определение запуска ENG) (этап S4).
На Фиг.11 показывается блок-схема процедур при выводе суждения о начале работы ENG. При выводе суждения о том, начинать или не начинать работу двигателя внутреннего сгорания 109, блок управления ECU 119 выводит суждение о том, существует или не существует требование от кондиционера, такое как требование на охлаждение или нагревание пассажирского салона (этап S11). Если выводится суждение, что требование от кондиционера отсутствует, то блок управления ECU 119 выводит суждение о том, является или не является величина SOC аккумуляторной батареи 113 (SOC аккумуляторной батареи) ниже, чем заранее заданная пороговая величина Sth (этап S12).
Если на этапе S12 выведено суждение, что величина SOC аккумуляторной батареи ≥ Sth, то блок управления ECU 119 выводит суждение о том, является или не является скорость транспортного средства выше, чем заранее заданная пороговая величина Vth (этап S13). Для предотвращения частого возникновения переключения в управлении, эти пороговые величины Sth, Vth задаются так, чтобы они имели заранее заданную ширину петли гистерезиса. Если скорость транспортного средства ≤ Vth, то блок управления ECU 119 исполняет процедуру нечеткого вывода (этап S14).
Если на этапе S11 выведено суждение о том, что требование от кондиционера существует, в случае, когда на этапе S12 выведено суждение о том, что величина SOC аккумуляторной батареи < Sth, или когда на этапе S13 выведено суждение о том, что скорость транспортного средства > Vth, зная при этом, что существует требование на начало работы ENG, то блок управления ECU 119 исполняет следующую операцию (этап S15).
На Фиг.12 показывается блок-схема процедур нечетких выводов, которые исполняются во время вынесения суждения о начале работы ENG. Сначала блок управления ECU 119 выводит возможную наивысшую выходную величину PU и верхнюю граничную выходную величину снижения потребления топлива PL, базируясь на величине SOC и температуре аккумуляторной батареи 113 (этап S21). Затем блок управления ECU 119 выводит суждение о том, является или не является требуемая электроэнергия P, необходимая для электродвигателя 101, больше, чем возможная наивысшая выходная величина PU (этап S22). Если выведено суждение, что необходимая для электродвигателя 101 требуемая электроэнергия P≥PU, то блок управления ECU 119 выводит суждение о том, является или не является требуемая электроэнергия МОТ P меньше, чем верхняя граничная выходная величина снижения потребления топлива PL (этап S23). Если на этапе S23 выведено суждение, что требуемая электроэнергия P, необходимая для электродвигателя 101, ≤ верхней граничной выходной величины снижения потребления топлива PL, зная при этом, что не существует требования на начало движения ENG, то блок управления ECU 119 заканчивает нечеткие выводы.
Если на этапе S23 выведено суждение, что требуемая электроэнергия P, необходимая для электродвигателя 101, ≥ верхней граничной выходной величины снижения потребления топлива PL, то есть верхняя граничная выходная величина снижения потребления топлива PL ≤ требуемой электроэнергии МОТ P ≤ возможной наивысшей выходной величины PU, то блок управления ECU 119 задает функцию принадлежности оценки пригодности режима движения из верхней граничной выходной величины снижения потребления топлива PL и возможной наивысшей выходной величины PU. Затем блок управления ECU 119 исполняет нечеткие рассуждения, базируясь на этой функции принадлежности оценки пригодности режима движения и текущей требуемой электроэнергии P, необходимой для электродвигателя 101, с тем чтобы вывести уровень пригодности режима движения при текущей требуемой электроэнергии P, необходимой для электродвигателя 101 (этап S24).
Затем блок управления ECU 119 осуществляет нечеткие рассуждения, базируясь на функции принадлежности оценки намерения ускорения в зависимости от величины показателя изменения по времени степени открытия педали акселератора ΔAP и текущей величины ΔAP, и выводит оценку намерения ускорения для текущего значения ΔAP (этап S25). Затем блок управления ECU 119 осуществляет вычисление центров тяжести оценки пригодности режима движения и оценки намерения ускорения и из этого выводит меру требования на начало работы ENG (этап S26).
Далее блок управления ECU 119 осуществляет интегрирование меры требования на начало работы ENG (этап S27). Затем блок управления ECU 119 выводит суждение о том, является или не является интегральная величина меры требования на начало работы ENG равна или больше, чем заранее заданная пороговая величина Ith. Для предотвращения частого возникновения переключения в управлении пороговая величина Ith задается так, что она имеет заранее заданную ширину петли гистерезиса. Если на этапе S27 выводится суждение, что интегральная величина < Ith, зная при этом, что не существует требования на начало работы ENG, то блок управления ECU 119 заканчивает нечеткие выводы. Если на этапе S22 выводится суждение, что необходимая для электродвигателя 101 требуемая электроэнергия P>PU, или если на этапе S28 выводится суждение, что интегральная величина ≥ Ith, зная при этом, что существует требование на начало работы ENG, то блок управления ECU 119 осуществляет следующую процедуру.
Обращаясь снова к Фиг.10, видно, что блок управления ECU 119, базируясь на суждении о начале работы ENG на этапе S4, выводит суждение о том, имеется или не имеется требование на начало работы ENG (этап S5). В случае, если на этапе S5 выводится суждение, что требование на начало работы ENG отсутствует, то блок управления ECU 119 осуществляет управление электродвигателем 101, базируясь на требуемом механическом моменте Т, так, что при этом транспортное средство будет перемещаться в режиме движения EV без запуска двигателя внутреннего сгорания 109 (этап S7). В отличие от этого, если на этапе S5 вынесено суждение, что существует требование на начало работы ENG, то блок управления ECU 119 осуществляет управление двигателем внутреннего сгорания 109 и электрогенератором 107 так, что при начале работы двигателя внутреннего сгорания 109 транспортное средство будет перемещаться в последовательном режиме движения (этап S6). В то же самое время блок управления ECU 119 осуществляет управление электродвигателем 101, базируясь на требуемом механическом моменте Т (этап S7).
Таким образом, в соответствии с настоящим примером осуществления устройства управления гибридного транспортного средства, двигатель внутреннего сгорания 109 начинает работу, когда возможная наивысшая выходная величина PU, которая задается в соответствии с состоянием аккумуляторной батареи 113, превосходит требуемую электроэнергию электродвигателя 101, и поэтому не только может быть гарантирована требуемая электроэнергия, но также может быть предотвращена избыточная зарядка аккумуляторной батареи 113. Кроме того, задается верхняя граничная выходная величина снижения потребления топлива PL, которая является максимальной величиной требуемой электроэнергии, при которой потребление топлива, имеющее место при перемещении транспортного средства в режиме движения EV, улучшается в большей степени, чем при потреблении топлива, имеющего место при перемещении транспортного средства в режиме нулевого входа/выхода аккумуляторной батареи, а вывод о запуске или не запуске двигателя внутреннего сгорания 109 осуществляется на базе верхней граничной выходной величины снижения потребления топлива PL, и поэтому потребление топлива может быть еще более оптимизировано. Кроме того, верхняя граничная выходная величина снижения потребления топлива PL задается, базируясь на состоянии аккумуляторной батареи 113 с учетом того факта, что выходная электроэнергия понижается в зависимости от величины SOC и температуры аккумуляторной батареи 113, и поэтому может быть предотвращена избыточная зарядка аккумуляторной батареи 113.
Кроме того, в соответствии с настоящим примером осуществления устройства управления гибридного транспортного средства, когда требуемая электроэнергия, которая необходима для электродвигателя 101, составляет величину, где-то между верхней граничной выходной величиной снижения потребления топлива PL и возможной наивысшей выходной величиной PU, осуществляются нечеткие рассуждения, базирующиеся на требуемой электроэнергии, которая необходима для электродвигателя 101, и намерениях водителя по ускорению, тем самым решение о запуске или не запуске двигателя внутреннего сгорания 109 принимается на базе результатов нечетких рассуждений. Это позволяет не только исключить опасность того, что из-за недостаточной электроэнергии, поступающей от аккумуляторной батареи 113, движущая сила будет недостаточной, но также предотвратить работу электродвигателя 113, не являющуюся необходимой для двигателя внутреннего сгорания 109. Кроме того, интегрированием меры требования на начало работы ENG может быть достигнута непрерывность условий движения транспортного средства, и поэтому будет исключена излишняя работа двигателя внутреннего сгорания 109. В этом случае станет возможным более точное управление, принимающее в расчет намерения водителя.
(Первый модифицированный пример)
В описанном выше примере осуществления блок управления ECU 119 задает функцию принадлежности оценки пригодности режима движения, базируясь на величине SOC и температуре аккумуляторной батареи 113. Однако функция принадлежности оценки пригодности режима движения может быть скорректирована на основе температуры охлаждающей жидкости двигателя внутреннего сгорания 109 или электроэнергии, потребленной вспомогательным оборудованием 117.
Например, в случае, когда температура охлаждающей жидкости двигателя внутреннего сгорания 109 является низкой, возникнет большая необходимость в ускорении прогрева двигателя внутреннего сгорания 109, поэтому желательно, чтобы транспортное средство перемещалось в последовательном режиме движения, запустив для этого двигатель внутреннего сгорания 119 пораньше. Следовательно, в случае, когда температура охлаждающей жидкости двигателя внутреннего сгорания 109 является низкой, функция принадлежности оценки пригодности режима движения корректируется так, чтобы имелась тенденция к легкому выводу высокой меры пригодности последовательного режима движения. Когда температура охлаждающей жидкости двигателя внутреннего сгорания 109 будет ниже, чем заранее заданная величина, эта коррекция реализуется использованием произвольного способа, такого, например, как способ вычитания заранее заданной величины из верхней граничной выходной величины снижения потребления топлива PL, или способа вычитания величины, соответствующей температуре охлаждающей жидкости двигателя внутреннего сгорания 109, из верхней граничной выходной величины снижения потребления топлива PL. Корректировкой подобным образом функции принадлежности оценки пригодности режима движения становится легко вынести суждение о том, что существует требование на начало работы двигателя внутреннего сгорания 109 в том случае, когда температура охлаждающей жидкости двигателя внутреннего сгорания 109 является низкой.
Кроме того, в случае, когда температура охлаждающей жидкости двигателя внутреннего сгорания 109 является высокой, весьма вероятно, что необходимо будет приостановить работу двигателя внутреннего сгорания 109, с тем чтобы снизить температуру охлаждающей жидкости, и поэтому желательно, чтобы транспортное средство перемещалось бы в режиме движения EV без запуска двигателя внутреннего сгорания 109. Следовательно, в случае, когда температура охлаждающей жидкости двигателя внутреннего сгорания 109 является высокой, функция принадлежности оценки пригодности режима движения корректируется так, что легко будет выведена низкая мера пригодности последовательного режима движения. В случае, когда температура охлаждающей жидкости двигателя внутреннего сгорания 109 является выше, чем заранее заданная величина, то эта коррекция реализуется использованием произвольного способа, такого, например, как способ добавления заранее заданной величины к верхней граничной выходной величине снижения потребления топлива PL, или способа добавления величины, соответствующей температуре охлаждающей жидкости двигателя внутреннего сгорания 109, к верхней граничной выходной величине снижения потребления топлива PL. Осуществив подобным образом корректировку функции принадлежности оценки пригодности режима движения в том случае, когда температура охлаждающей жидкости двигателя внутреннего сгорания 109 является низкой, будет уже трудно вывести суждение о том, что требуется запуск двигателя внутреннего сгорания 109, так что становится легко продолжить режим движения EV.
Кроме того, когда электроэнергия, потребляемая вспомогательным оборудованием 117, является большой, то было бы желательно подзарядить аккумуляторную батарею 113, запустив для этого двигатель внутреннего сгорания 109 пораньше. Следовательно, в случае, когда потребляемая вспомогательным оборудованием 117 электроэнергия является большой, функция принадлежности оценки пригодности режима движения корректируется так, что выводится высокая мера пригодности последовательного режима движения. В случае, когда потребляемая вспомогательным оборудованием 117 электроэнергия является ниже, чем заранее заданная величина, эта коррекция реализуется использованием произвольного способа, такого, например, как способ вычитания заранее заданной величины из верхней граничной выходной величины снижения потребления топлива PL, или способа вычитания величины, соответствующей потребляемой вспомогательным оборудованием 117 электроэнергии, из верхней граничной выходной величины снижения потребления топлива PL. Корректировкой подобным образом функции принадлежности оценки пригодности режима движения становится легко вывести суждение о высокой мере требования о начале работы ENG. Поэтому двигатель внутреннего сгорания 109 может быть запущен пораньше для генерации электроэнергии, обеспечивая тем самым возможность удовлетворения в потребной электроэнергии.
(Второй модифицированный пример)
В описанном выше примере осуществления блок управления ECU 119 задает функцию принадлежности оценки намерения ускорения, базируясь на показателе изменения по времени степени открытия педали акселератора ΔAP. Однако эта функция принадлежности оценки намерения ускорения может быть скорректирована исходя из положения экологического переключателя, которым приоритет отдается потреблению топлива или исходя из задания диапазона переключения коробки передач.
Например, в случае, когда экологический переключатель включен, то из этого делается вывод, что водитель намерен ехать таким образом, что приоритет отдается потреблению топлива, и поэтому предпочтительно, чтобы транспортное средство перемещалось бы в режиме движения EV, без запуска двигателя внутреннего сгорания 109. Следовательно, в случае, когда делается вывод, что водитель решает ехать в режиме, когда приоритет отдается потреблению топлива, функция принадлежности оценки намерения ускорения корректируется в положительную сторону так, что чувствительность вывода о намерении ускорения уменьшается.
Кроме того, когда диапазон переключения коробки передач задает в спортивном режиме, то делается вывод, что водитель решает ехать в режиме, когда приоритет отдается ускорению. Поэтому желательно, чтобы транспортное средство перемещалось бы в последовательном режиме движения с более ранним запуском двигателя внутреннего сгорания 109. Следовательно, в случае, когда делается вывод, что водитель решает ехать в режиме, когда приоритет отдается ускорению, функция принадлежности оценки намерения ускорения корректируется в отрицательную сторону так, что чувствительность вывода о намерении ускорения увеличивается. Подобной коррекцией функции принадлежности оценки намерения ускорения с учетом намерений водителя могут быть улучшены общие характеристики управления и, кроме того, может быть еще более оптимизировано потребление топлива.
(Третий модифицированный пример)
В описанном выше примере осуществления может, в зависимости от условий движения транспортного средства, возникнуть такая ситуация, при которой потери становятся меньше, когда транспортное средство передвигается в двигательном режиме движения, в котором ведущие колеса DW, DW непосредственно приводятся от двигателя внутреннего сгорания 109, чем тогда, когда транспортное средство перемещается в последовательном режиме движения. В этом случае блок управления ECU 119 подсоединяет муфту 115 так, чтобы при этом режим движения переключается из последовательного режима движения в двигательный режим движения. И тем самым транспортное средство может приводиться в движение с хорошим коэффициентом полезного действия.
В двигательном режиме движения двигатель внутреннего сгорания 109 подсоединен к ведущим валам ведущих колес DW, DW посредством подсоединения муфты 115. Когда двигатель внутреннего сгорания 109 подсоединяется к ведущим колесам DW, DW, существует ограничение на заданную величину передаточного отношения, и поэтому двигатель внутреннего сгорания 109 не может работать в точке, где обеспечивается хорошее потребление топлива, а кроме того, возникают также и механические потери.
С другой стороны, хотя двигатель внутреннего сгорания 109 в режиме нулевого входа/выхода аккумуляторной батареи может работать в рабочей точке, где обеспечивается хорошее потребление топлива, однако при этом возникают электрические потери на линии передачи электроэнергии, генерируемой электрогенератором 107, на электродвигатель 101 через второй инвертор 105 и первый инвертор 103.
Исходя из этого в третьем модифицированном примере полные потери, которые могли бы возникнуть в двигательном режиме движения, и полные потери, которые могли бы возникнуть в режиме нулевого входа/выхода аккумуляторной батареи, определяются заранее экспериментальными методами. Далее, когда полные потери, возникающие в двигательном режиме движения, становятся меньше, чем полные потери, создаваемые в режиме нулевого входа/выхода аккумуляторной батареи, то есть, когда выводится суждение, что потребление топлива становится лучше, если транспортное средство перемещается в двигательном режиме движения, чем когда транспортное средство перемещается в последовательном режиме движения, то блок управления ECU 119 подсоединяет муфту 115, и в таким случае транспортное средство будет перемещаться в двигательном режиме движения. Тем самым режим движения может быть быстро переключен из последовательного режима движения в двигательный режим движения, и поэтому потребление топлива может быть еще более оптимизировано.
Заметим, что настоящее изобретение не ограничено описанным примером осуществления, а может быть модифицировано или улучшено по мере необходимости.
Описание ссылочных цифр и символов
101 - электродвигатель (МОТ);
107 - электрогенератор (GEN);
109 - многоцилиндровый двигатель внутреннего сгорания (ENG);
113 - аккумуляторная батарея (ВАТТ);
115 - муфта сцепления;
117 - вспомогательное оборудование (ACCESSORY);
119 - блок управления ECU (MG ECU).
Устройство управления выходным напряжением электрогенератора
Привод для гибридного транспортного средства
Гибридное транспортное средство
Крышка в сборе для фиксатора багажного отсека транспортного средства
Шестеренный запорный клапан для вентиляционной системы
Сиденье транспортного средства в сборе и транспортные средства с таким сиденьем
Силовая передача для гибридного транспортного средства
Устройство силовой передачи
Устройство управления для электродвигателя
Конструкция для размещения автомобильного электронного компонента для электрического двигателя, приводящего в движение автомобиль
Облицовочная накладка бампера с вырезами
Устройство управления выходным напряжением электрогенератора
Привод для гибридного транспортного средства
Гибридное транспортное средство
Кожа
Крышка в сборе для фиксатора багажного отсека транспортного средства
Устройство управления преобразователем
Шестеренный запорный клапан для вентиляционной системы
Сиденье транспортного средства в сборе и транспортные средства с таким сиденьем
Силовая передача для гибридного транспортного средства

