МОТОР-РЕДУКТОР С ИНТЕГРИРОВАННЫМ ПРЕЦЕССИРУЮЩИМ ЗУБЧАТЫМ КОЛЕСОМ (ВАРИАНТЫ)
Вид РИД
Изобретение
Группа изобретений относится к электротехнике и применяется в электромеханических приводах, в частности в приборостроении, в средствах автоматизации для различных технологических линий. Изобретение относится, в том числе, к электромеханическим приводам в следящих системах, например в системах, обеспечивающих сочетание больших нагрузок на выходном валу и малых углов поворота выходного вала.
Назначением изобретения является создание новой конструкции электрической машины, которая конструктивно сопряжена с редуктором и может быть использована в качестве электропривода широкого применения. Мотор-редуктор используют для преобразования электрической энергии, поступающей от внешнего ее источника, в том числе, возможно, - регулируемого по необходимому закону, в механическую энергию вращения выходного вала, сочленяемого с элементами и узлами автоматизируемых приборов, машин и механизмов.
ВАРИАНТ 1
Известно изобретение «Планетарная прецессионная передача", авторское свидетельство SU 1456658, опубл. 07.02.1989, МПК F16H 1/32, которая снабжена корпусом, выходным валом, коническим колесом, связанным с выходным валом и сателлитом с возможностью колебательного движения, выполняющим функцию прецессирующего колеса. У них зубчатые венцы выполнены торцевыми коническими, а сателлиты совершают не вращательное, а прецессионное движение вокруг оси редуктора. Профили зубчатых венцов выполнены эвольвентными. Изобретение относится к редукторам и имеет иное назначение, чем заявленное устройство. Изобретение позволяет увеличить точность и долговечность передачи путем устранения люфта в зубчатом зацеплении, однако не является мотор-редуктором, поскольку снабжено входным силовым валом, передающим крутящий момент на зубчатые колеса. Кроме того, в данной конструкции имеются водило и трущиеся поверхности, что снижает ресурс и надежность конструкции, а также существенно усложняет его конструкцию.
Известно изобретение «Коническая волновая передача», патент RU 2145016, опубл. 27.01.2000, МПК F16H 1/32, снабженная корпусом, по меньшей мере двумя установленными с возможностью зацепления коническими зубчатыми колесами с торцевыми венцами, одно из которых установлено неподвижно в окружном направлении относительно корпуса и с возможностью качания в осевом направлении под действием генератора колебаний, а другое колесо закреплено на выходном валу. Изобретение может быть использовано в приводах, однако его функция ограничивается только функцией редуктора, поскольку имеет входной силовой вал. Данное устройство обеспечивает повышение нагрузочной способности волновой передачи при обеспечении высокого кпд и малых габаритах, однако не является мотор-редуктором. Функцией генератора колебаний является только осуществление прецессионного движения колеса, однако эта конструкция сложна и технологически дорогостояща. Кроме того, наличие гибких деформируемых элементов существенно усложняет конструкцию и понижает ее надежность.
Известно изобретение «Торцовый волновой электродвигатель», авторское свидетельство SU 773851, опубл. 23.10.1980, МПК 02K 41/06, который имеет статор с обмоткой и зубчатую передачу. Позволяет повысить устойчивость работы электродвигателя и повысить устойчивость гибкого ротора. Однако в данном изобретение решается иная задача, а именно преодолеть потери в гибком многослойном магнитопроводящем роторе из-за прохождения магнитного потока поперек слоев. В данном устройстве используют гибкий ротор, который снижает надежность конструкции и усложняет ее производство. Гибкие элементы также уменьшают ресурс изделия и, кроме того, не позволяют увеличить крутящий момент на выходном валу для использования в заданном режиме.
Наиболее близким техническим решением к заявляемой группе изобретений является изобретение «Планетарный электромотор-редуктор», патент RU 2294587, опубл. 27.02.2007, МПК H02K 7/116, F16H 1/32, который снабжен корпусом, зубчатым колесом редуктора и промежуточным зубчатым колесом (шестерней), причем зубчатое колесо первой ступени редуктора выполняет функцию статора электродвигателя и снабжено катушками электромагнитов, выполнено с зубьями, входящими в зацепление с зубьями промежуточного зубчатого колеса. На зубчатом колесе 1-й ступени установлен торцевой коллектор с токоподводящими и токоотводящими контактами, зубья шестерни входят в контакт с зубьями зубчатого колеса второй ступени (шпинделем) и подача тока в катушки электромагнитов вызывает смещение промежуточного колеса (шестерни) относительно точки наибольшего вхождения ее зубьев в зубья зубчатого колеса 1-й ступени и промежуточного зубчатого колеса друг в друга, или относительно точки контакта образованных ими двух фрикционных пар. Изобретение позволяет объединить первую и вторую ступени редуктора в качестве статора и якоря электродвигателя соответственно. Однако в конструкции имеются трущиеся поверхности, что приводит к возникновению дополнительных затрат на преодоление трения, а также на разъем контактов, в которых может возникать искрение, что существенно снижает долговечность, надежность и уменьшение точности по углам поворота и/или уменьшение точности получения заданной величины крутящего момента на выходном валу. Кроме того, конструкция не позволяет использовать прецессирующее зубчатое колесо, с помощью которого обеспечивают в предложенном техническом решении высокую точность поворота выходного вала. Кроме того, зубчатая передача обладает низкой нагрузочной способностью за счет того, что в ней отсутствует узел передачи реакции крутящего момента на корпус.
Задачей изобретения является создание устройства, в котором сочетают преимущества торцевого электродвигателя и планетарной прецессионной передачи.
Известно, что по мере развития средств автоматизации различных технологий в автоматических приводных системах (АПС) для вращения нагрузок появились устройства, в которых осуществлено сочленение электродвигателя и редуктора различного рода муфтами. При этом применялись электрические двигатели различных типов: синхронные, асинхронные или шаговые двигатели. Следующее поколение приводных систем объединило воедино статор и ротор в общую систему электродвигатель-редуктор. Такие устройства стали называть мотор-редукторами (MP). В них первая ступень с зубчатым колесом, жестко закрепленном на корпусе, несла функцию статора, а вторая ступень с зубчатым колесом, жестко закрепленным на выходном валу, несла функцию ротора.
По мере развития АПС для вращения нагрузок, в том числе требующих высоких точностей исполнения электрических команд для осуществления заданного закона их движений, а также для снижения масс и габаритов MP, среди известных конструкций собственно редукторов применяют различные варианты исполнений планетарных редукторов. Среди них, в силу своей компактности (т.к. они позволяют реализовывать большие передаточные числа в одной ступени редукции), выделились вначале планетарные редукторы с цилиндрическими зубчатыми колесами с эксцентриковыми валами. При этом у них все элементы выполнены жесткими, а профили зубчатых венцов колес выполнены или эвольвентными, или циклоидальными.
Для создания высокоточных АПС в настоящее время изготавливают планетарные редукторы с гибкими конструкциями зубчатых колес. Такие конструкции редуктора называются волновыми редукторами. При этом они могут быть с цилиндрическими и торцевыми зубчатыми колесами.
С целью минимизации масс и габаритов MP, особенно для создания высокоточных АПС, появились приводы, в которых отдельные детали (узлы) объединяют функции как элементов двигателей, так и элементов редукторов, что и обеспечивает их меньшие массогабаритные размеры при той же мощности, что и у прежних конструкций MP. При этом изначально элементы их конструкций, обеспечивающих функции собственно «редукции» для получения больших выходных моментов вращения нагрузки при более низких скоростях вращения, выполнены по принципу волновых редукторов с цилиндрическими гибкими зубчатыми колесами. Такой тип MP называют респонсинный привод. (См. Воробьев А.В. Респонсинный привод. -М.: Машиностроение 1978 г.).
Из рассмотренных выше наиболее общий вариант описан в патенте «Торцевой волновой электродвигатель» по а.с. 773851, который выполнен на базе торцевых волновых редукторов, а также мотор-редуктор по патенту RU 2171526.
Так, основной технической задачей известных разработок было преодоление низкой частоты переключений фаз электромагнитных катушек, выражающейся в малом быстродействии из-за большой массы подвижных якорей (см. а.с. 1598066 «Шаговый двигатель с колеблющимся ротором»). Однако инерционность выдвижного сердечника является существенным недостатком. К их преимуществу относится возможность реализации больших сил соленоидов, последовательно (как в шаговых двигателях) прилагаемых к прецессирующему диску.
Однако конструкция, описанная в патенте RU 2294587 «Планетарный электромотор-редуктор», не является волновым MP, а также не является и торцевым MP. В его конструкции используют схемы планетарных редукторов с эксцентриковыми валами. Его очевидный недостаток, как минимум, состоит в наличии подвижных щеточных контактов, что присуще коллекторным двигателям постоянного тока. Кроме того, магнитные сопротивления цепей формирования магнитодвижущих сил (МДС) крайне велики. Поэтому, несмотря на то, что все элементы жесткие, удельные мощности на единицу масс и габаритов этих приводов не отвечают требуемым.
Предложенная конструкция также не относится ни к планетарным мотор-редукторам, ни к волновым мотор-редукторам. Однако указанные выше недостатки известных конструкций преодолены в предлагаемом техническом решении. В связи с этим, предложенную конструкцию возможно отнести к высокоточным мотор-редукторам с интегрированным прецессирующим зубчатым колесом, в котором используются только жесткие (негибкие) элементы и который обеспечивает достоинства высокоточных волновых мотор-редукторов и одновременно планетарных редукторов.
Таким образом, при различных вариантах предложенной группы изобретений обеспечивается достижение следующего технического результата:
- увеличение ресурса мотор-редуктора за счет, в частности, отсутствия гибких элементов, выполняющих функцию ротора, поскольку не требуется решать задачу устойчивости гибких элементов;
- увеличение точности поворота выходного вала и/или крутящего момента на выходном валу за счет, в частности, устранения люфта в зубчатом зацеплении;
- упрощение конструкции за счет исключения сложных элементов с малой надежностью, что приводит к увеличению надежности изделия;
- возможность работы в различных режимах: как дискретно-непрерывном, так и непрерывном вращении выходного вала.
Данный технический результат достигается за счет того, что в варианте 1 используют индукционные катушки с выдвижным сердечником.
Общим с прототипом является то, что мотор-редуктор содержит корпус, снабженный зубчатым колесом, которое является зубчатым колесом редуктора (или одноступенчатого или двух ступенчатого), и корпус с индукционными катушками выполняет функцию статора электродвигателя, корпус снабжен индукционными катушками (электромагнитами типа соленоид) и мотор-редуктор снабжен промежуточным зубчатым колесом. Причем зубчатое колесо корпуса выполнено с зубьями, входящими в зацепление с зубьями промежуточного зубчатого колеса. Предложенная конструкция по варианту 1 отличается тем, что корпус соединен жестко (либо выполнен монолитно) с зубчатым колесом корпуса. Корпус снабжен индукционными катушками с подвижным сердечником, промежуточное зубчатое колесо выполнено в виде прецессирующего зубчатого колеса с расположенными с обеих сторон двумя зубчатыми венцами и закреплено с возможностью прецессионного движения. В одном исполнении прецессирующее зубчатое колесо осуществляет прецессию за счет его соединения посредством шаровой опоры, например, сферических подшипников, на вспомогательной оси, а в другом варианте оно совершает прецессию за счет того, что удерживается только за счет зубчатого защепления в зубчатом колесе корпус с одной стороны и зубчатого зацепления в зубчатом колесе вала - с другой стороны. При этом вспомогательная ось и выходной вал выполнен как единое целое и совместно вращаются в корпусе. Прецессирующее зубчатое колесо в обоих вариантах исполнения осуществляет прецессионное движение как полную прецессию, т.е. регулярная прецессия и нутация на малые углы. Зубчатое колесо корпуса и промежуточное зубчатое колесо (выполненное в виде прецессирующего зубчатого колеса) выполняют совместно функцию зубчатой муфты или первой ступени ротора, в зависимости от одинакового количества зубьев (муфта) или отличного количества зубьев (первая ступень редуктора). Мотор-редуктор снабжен дополнительно зубчатым колесом вала, жестко закрепленным на выходном валу. При этом с одной стороны зубчатый венец прецессирующего зубчатого колеса входит в зацепление с зубьями зубчатого колеса корпуса, а с другой стороны зубчатый венец прецессирующего зубчатого колеса входит в зацепление с зубьями зубчатого колеса вала. Вспомогательная ось закреплена одним концом в корпусе, например, жестко по прессовой посадке или с возможностью технологического проворота, если по скользящей посадке, а другим - в глухой расточке на выходном валу с возможностью поворота относительно оси выходного вала. Кроме того, вспомогательная ось может быть закреплена в корпусе посредством подшипника, например, сферического, тогда прецессирующее движение осуществляется как сложное совместное движение оси с прецессирующим зубчатым колесом. В этом случае допускается нутация вспомогательной оси на малые углы, а прецессирующее зубчатое колесо держится только за счет зацепления его зубчатых венцов с обеих сторон. В другом варианте исполнения вспомогательная ось выполнена с выходным валом как единое целое и они закреплены в корпусе на двух подшипниках. Индукционные катушки корпуса с зубчатым колесом размещены по окружности в периферийной части прецессирующего зубчатого колеса с зазором между торцом катушки и плоской поверхностью прецессирующего зубчатого колеса. Сердечник соответствующей индукционной катушки выполнен выступающим за ее торец, и в выдвинутом положении торец сердечника без зазора прижат к плоской поверхности прецессирующего зубчатого колеса. Так сердечник в выдвинутом положении, например, с помощью пружины, выдвинут с сохранением полного зацепления зубчатых венцов зубчатого колеса корпуса и соответствующего зубчатого венца прецессирующего зубчатого колеса, а в убранном положении образует с его поверхностью зазор не менее величины прецессии прецессирующего зубчатого колеса в продольном направлении вспомогательной оси. Выходной вал закреплен одним концом посредством подшипников в крышке корпуса с возможностью поворота, а другим концом посредством глухой расточки - со вспомогательной осью, в другом исполнении выполнен вместе со вспомогательной осью. Причем зубчатые венцы всех зубчатых колес снабжены торцевыми зубьями и зубчатое колесо корпуса имеет одинаковое или, по меньшей мере, на один зуб меньше, чем число зубьев зубчатого венца, обращенного к нему прецессирующего зубчатого колеса, расположенного на прецессирующем зубчатом колесе с его стороны, а зубчатый венец на прецессирующем зубчатом колесе, расположенный со стороны зубчатого колеса вала, имеет, по меньшей мере, число зубьев на единицу больше, чем число зубьев зубчатого колеса вала. В случае разного числа зубьев на колесе корпуса и на прецессирующем колесе с его стороны, функции редуктора выполняются как первая ступень редуктора. В частных случаях возможны различные исполнения зубьев зубчатых колес. Так, например, профиль зубьев зубчатых колес выполнен эвольвентным или циклоидальным, или эпициклоидальным. В частности, циклоидальный профиль зубьев зубчатых колес может быть выполнен гипоциклоидальным - укороченным или удлиненным, так же как и профиль эпициклоидальных зубьев - укороченным или удлиненным. Например, в корпусе по окружности может быть размещено по меньшей мере три индукционные катушки. Количество индукционных катушек (соленоидов) зависит от требуемой величины крутящего момента на выходном валу. Сердечник каждой индукционной катушки выполнен подвижным из магнитомягкой стали и снабжен сферическим торцом. В частном случае, вспомогательная ось одним концом закреплена в корпусе с возможностью технологического проворота для обеспечения соосности. Второй конец вспомогательной оси уперт в торец глухой втулки выходного вала, например, посредством шаровой опоры. В частном случае зубчатое колесо вала жестко закреплено на фланце выходного вала (представляет с ним единое целое). На мотор-редуктор, например, подают посредством внешнего управляющего блока на индукционные катушки ток с широтно-импульсной модуляцией в зависимости от режима работы мотор-редуктора.
Представленное техническое решение поясняется чертежами, в которых показаны примеры, не исчерпывающие всех вариантов возможных схем подключения управляющих блоков и иных блоков и устройств, необходимых для функционирования мотора-ротора, а также не охватывают всех возможных схем размещения и типов магнитопроводов на корпусе и модификаций конструктивного исполнения деталей. Чертежи демонстрируют наиболее общие принципы конструктивного решения варианта 1.
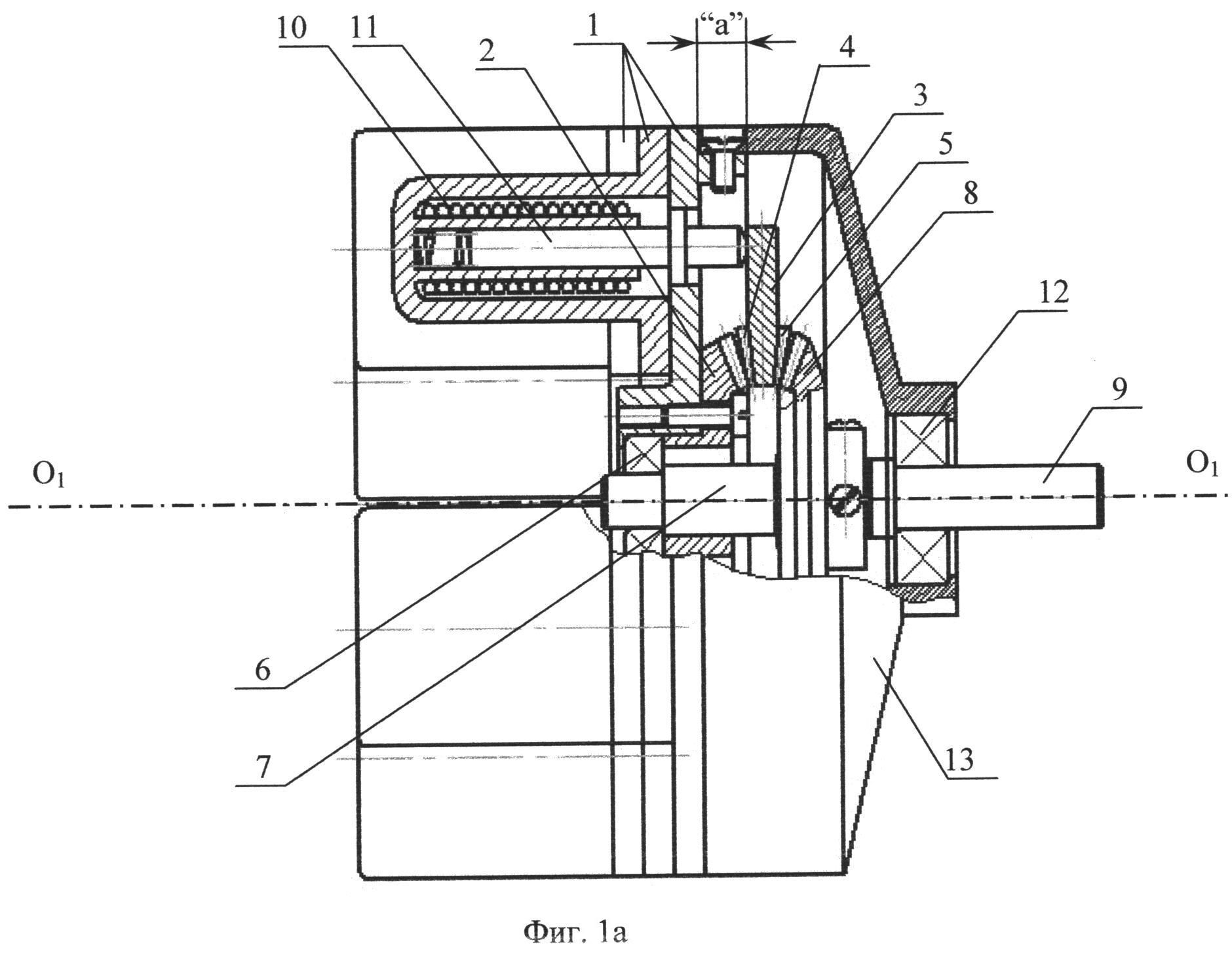
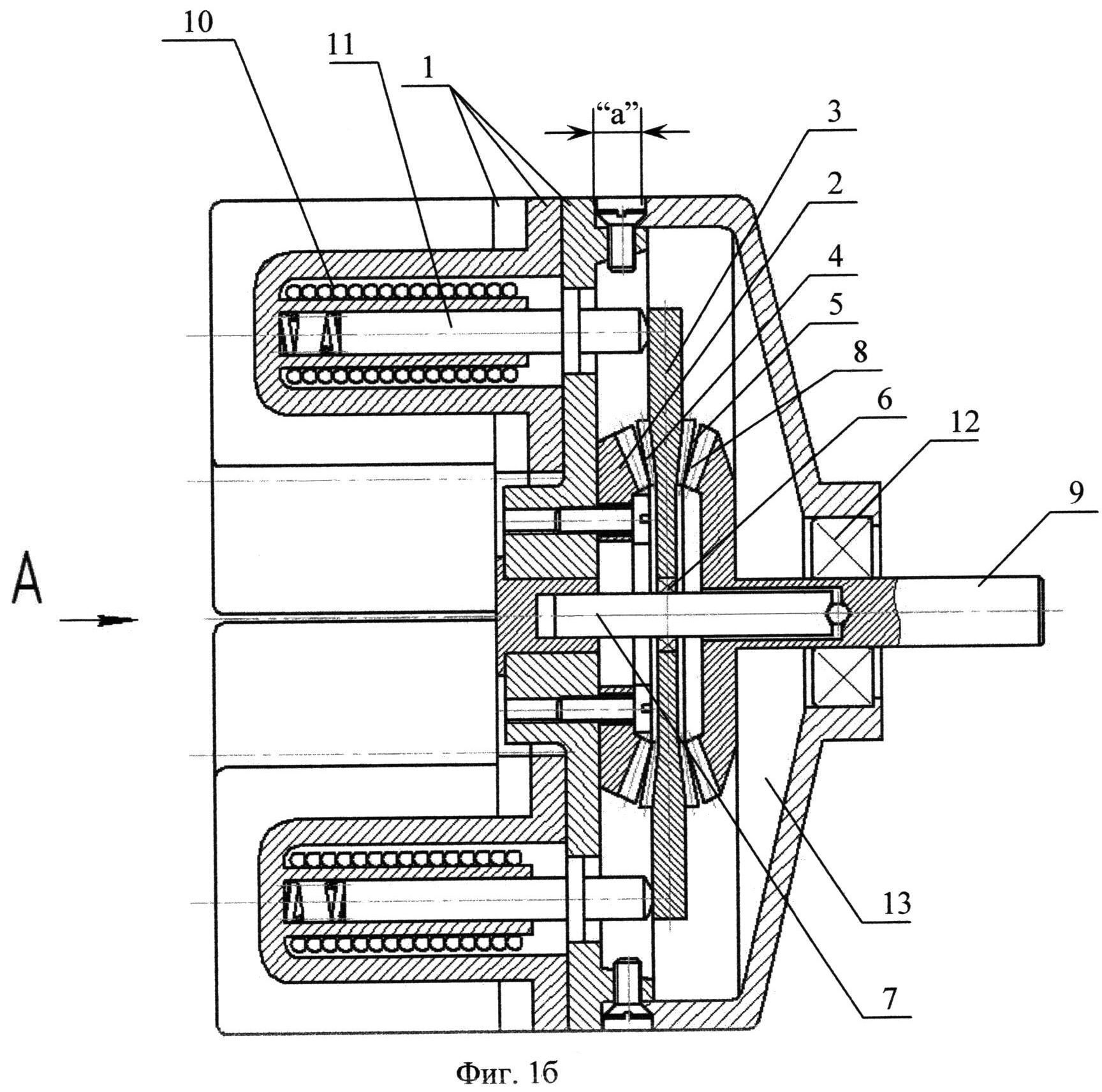
На Фиг.1а и б показано продольное сечение мотор-редуктора, снабженного индукционными катушками с подвижным сердечником по Варианту 1; исполнение «а» - со вспомогательной осью, являющейся с выходным валом единой сборкой. Исполнение «б» - со вспомогательной осью, соединенной с выходным валом посредством глухой расточки с шаровой опорой и с возможностью вращения выходного вала вокруг вспомогательной оси.
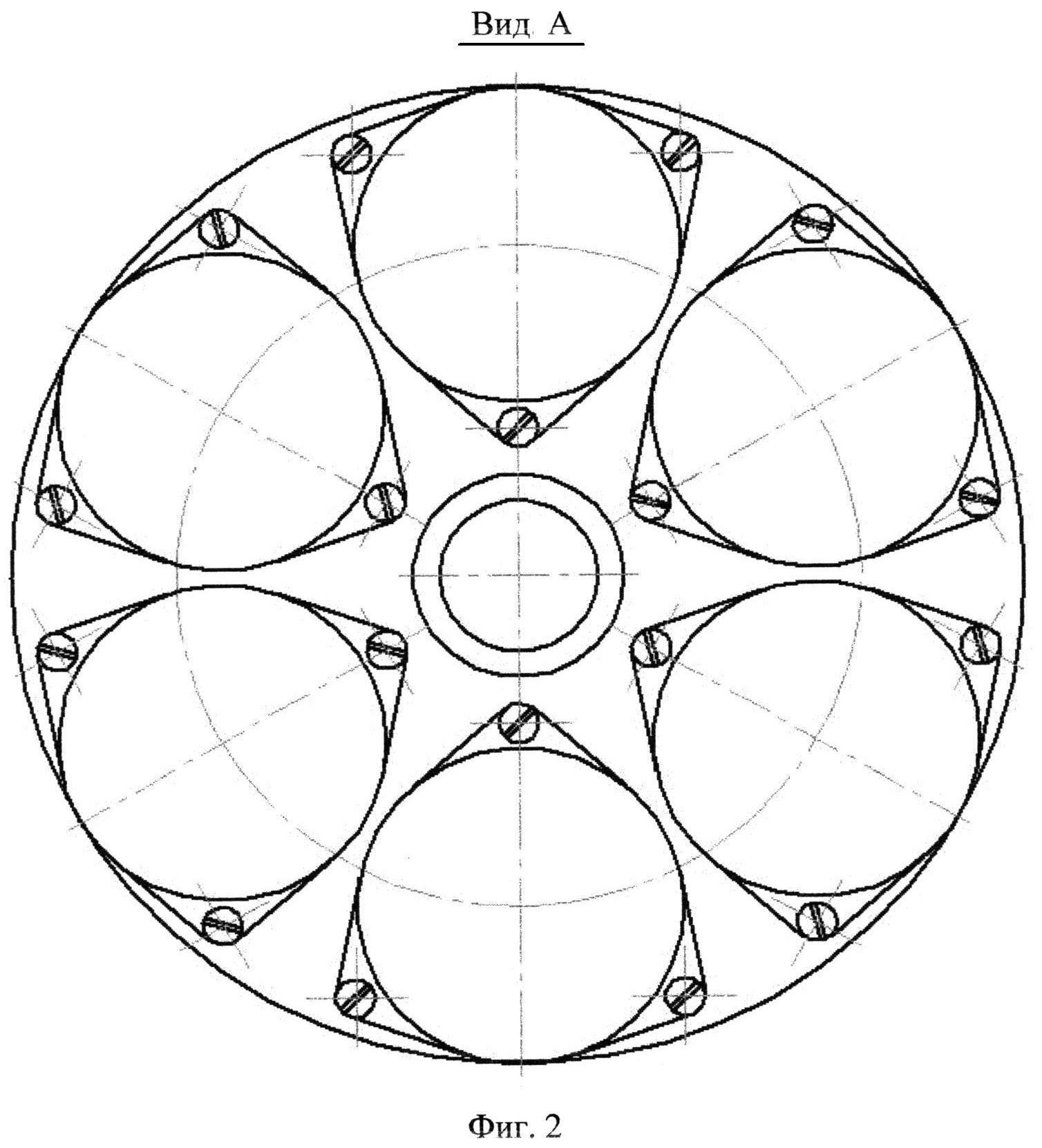
На Фиг.2 - показан вид А на кожухи индукционных катушек, закрепленных на корпусе мотор-редуктора.
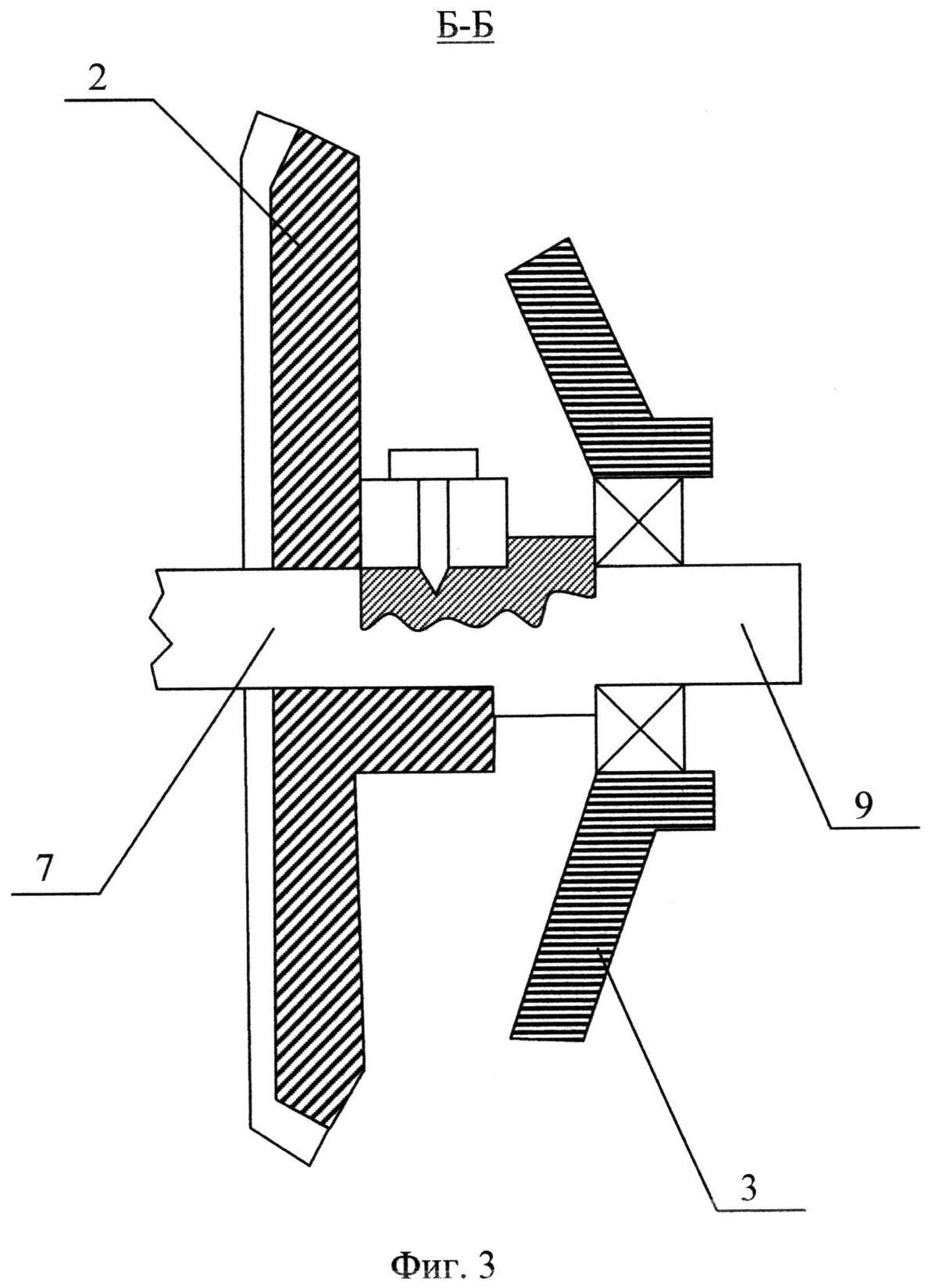
На Фиг.3 показано сечение Б-Б с жестко закрепленным зубчатым колесом выходного вала на выходном валу и со вспомогательной осью, выполненной как единое целое с выходным валом.
Устройство состоит из следующих составных частей.
Корпус (1), на корпусе монолитно закреплено зубчатое колесо корпуса (2) с торцевыми зубьями.
Зубчатое колесо корпуса (2) является одновременно зубчатым колесом, выполняющим функцию редуктора или зубчатой муфты. Ее зубья входят в зацепление с зубьями прецессирующего (промежуточного) зубчатого колеса (3). Эта пара венцов играет роль зубчатой муфты, предотвращающей вращение прецессирующего диска, вокруг оси изделия, и одновременно центральным колесом планетарной передачи в случае одинакового количества зубьев. В случае различия числа зубьев колеса (2) и зубчатого венца (4), эта пара зубчатых венцов выполняет функцию первой ступени планетарного редуктора. При этом зубчатое колесо корпуса (2) выполняет функцию по аналогии с центральным колесом планетарной передачи, которое установлено неподвижно. В обоих вариантах исполнения функцию редуктора выполняют совместно все три зубчатых колеса, включенных в конструкцию устройства. Однако в предлагаемой конструкции вместо передачи вращения от входного вала используют электродвижущую силу. Во втором исполнении она может также обеспечивать компенсационный поворот прецессирующего зубчатого колеса (3) (т.е. в этом случае ее работа аналогична дифференциалу).
Промежуточное зубчатое колесо (3) выполнено прецессирующим в двух плоскостях вокруг оси O-O1. Зубчатый венец зубчатого колеса корпуса (2) имеет одинаковое число зубьев с зубчатым венцом (4) (Фиг.1б) прецессирующего зубчатого колеса (3), расположенного на прецессирующем зубчатом колесе со стороны зубчатого колеса корпуса (2). Вариант с разным количеством зубьев зубчатого колеса корпуса (3) по меньшей мере на единицу меньшей, чем число зубьев зубчатого венца (4), показан на Фиг.1а. Прецессирующее зубчатое колесо (3) (прецессирующий диск) выполнено с торцевыми зубьями, расположенными двумя зубчатыми венцами (4 и 5) с его обеих сторон. Оно закреплено посредством сферического подшипника (6) (Фиг.1а) на вспомогательной оси (7) с возможностью прецессионного движения. Вспомогательная ось (7) может быть закреплена в корпусе через опору (7) (Фиг.1а), и прецессирующее зубчатое колесо (3) удерживается в рабочем состоянии только за счет зубчатого зацепления с обеих сторон. Зубчатый венец (5) прецессирующего зубчатого колеса (3), обращенный к зубчатому колесу вала (8), входит в зацепление с зубьями зубчатого колеса вала (8), жестко закрепленного на выходном валу (9). Зубчатый венец (5) на прецессирующем зубчатом колесе (3) и расположенный со стороны зубчатого венца зубчатого колеса выходного вала (8) имеет по меньшей мере число зубьев на единицу больше, чем число зубьев зубчатого венца колеса выходного вала (8). Разница в числе зубьев между парами зубчатых венцов (4 и 5) зависит от желаемого передаточного числа редукции между орбитальной скоростью прецессии и требуемой скоростью вращения выходного вала (9) изделия. Расчет разницы в зубьях ведется по известным расчетам планетарных передач.
Профили зубьев всех трех зубчатых колес выполнены торцевыми. Торцевые конические зубья рассчитаны таким образом, чтобы исходя из заданной величины прецессии обеспечить наименьший зазор в точке сопряжения зубьев. Этот расчет осуществляют по известным методикам. В зависимости от применяемой методики расчета профиля зуба, в предлагаемой конструкции возможно использовать как профиль зуба эвольвентный, так и циклоидальный или эпициклоидальный. Причем, и циклоидальная, и эпициклоидальная форма зуба может быть выполнена укороченной или удлиненной. В частном случае форма зуба может быть гипоциклоидальной и выполненной либо укороченной, либо удлиненной. Это зависит от требуемой точности поворота выходного вала, а также от требуемого вращающего момента на выходном валу. Зубчатое колесо (3) может быть выполнено как единое целое, где есть зубчатый венец и периферийная часть, на которую воздействуют сердечники индукционных катушек. Также зубчатое колесо может быть выполнено с накладками из прочной стали, на которые будут воздействовать сердечники. Однако в любом исполнении прецессирующее зубчатое колесо (3) является монолитным (единой жесткой конструкцией). Прецессирующее зубчатое колесо (3) осуществляет либо полную, либо регулярную прецессию. В случае если вспомогательная ось (7) в корпусе закреплена с возможностью малых колебаний, тогда имеется нутация этой оси на малые углы. Если вспомогательная ось (7) закреплена в корпусе (1) жестко, тогда осуществляется регулярная прецессия. В исполнении с единой конструкцией вспомогательной оси (7) и выходного вала (9) нутация недопустима, т.к. существенно повышается биение выходного вала (9), а следовательно, и шум. По тексту везде используется термин прецессия, которая в зависимости от исполнения может быть полной или регулярной.
В данном описании термин прецессия использован в значении - движение оси промежуточного (прецессирующего) зубчатого колеса (3) без его вращения, при котором ее ось описывает круговую коническую поверхность. Одновременно ее ось может совершать нутационные колебания. Прецессия в рассматриваемом случае осуществляется без нутационных колебаний, т.е. регулярная прецессия, которая по тексту названа просто прецессия. В отдельных рассматриваемых модификациях исполнения (см. Фиг.1б, 4б при возможности малых углов поворота вспомогательной оси в корпусе или Фиг.1а, 4б) может осуществляться как регулярная прецессия, так и прецессия вместе с нутацией.
Термин нутация в рассматриваемой конструкции использована в значении - колебательное движение оси прецессирующего (промежуточного) зубчатого колеса (3), происходящее одновременно с регулярной прецессией, при котором изменяется угол между осью O-O1 выходного вала (9), относительно которой происходит прецессия, и осью прецессирующего зубчатого колеса (3). В случае проворота вокруг своей оси прецессирующего колеса (3), т.е. осуществление первой ступени планетарного редуктора или варианта работы дифференциала, прецессирующее зубчатое колесо также может выполнять регулярную или полную прецессию. Однако углы нутации должны быть очень малы, поскольку расчет профиля зуба и движение точки контакта соприкасающихся зубьев будет очень сложен.
В варианте 1 корпус (1) снабжен катушками электромагнитов (10) с подвижным сердечником (11) и корпус с катушками выполняет функцию статора электродвигателя.
Зубчатое колесо вала (8) является дополнительным зубчатым колесом с торцевыми зубьями, жестко закрепленным на выходном валу (9). Зубчатое колесо вала (8) может быть закреплено либо на фланце выходного вала (9), либо посредством шлицов. При этом в глухой расточке, в которую входит вспомогательная ось (7), может быть предусмотрена втулка с шаровой опорой, которая будет выполнена либо цилиндрической, либо с малым углом расходящегося к торцу конуса. Коническая втулка может быть применена при варианте с полной прецессией прецессирующего зубчатого колеса (3).
Зубчатый венец (5) на прецессирующем зубчатом колесе (3), расположенный со стороны зубчатого венца зубчатого колеса выходного вала (9), имеет по меньшей мере число зубьев на единицу больше, чем число зубьев зубчатого венца колеса выходного вала (9). Разница по числу зубьев определяется исходя из требуемой.
Выходной вал (9) с зубчатым колесом (8) закреплен одним концом посредством подшипников (12) в крышке (13) корпуса (1) с возможностью поворота, а другим концом посредством, например, глухой втулки (14) и шаровой (шариковой) опоры (15) со вспомогательной осью (7).
Вспомогательная ось (7) закреплена одним концом жестко в корпусе (1) и для обеспечения соосности выходного вала (9) со вспомогательной осью (7) прецессирующего зубчатого колеса (3), другим концом закреплена в глухой втулке (14) выходного вала (9), как один из возможных вариантов - во втулке (14) размещена шариковая опора (15). Выходной вал (9) свободно вращается вокруг вспомогательной оси (7). При этом обеспечен необходимый зазор вспомогательной оси, обеспечивающий также и соосность вспомогательной оси (7) со втулкой (16), размещенной жестко на корпусе (1). Вспомогательная ось (7) закреплена во втулке (16) либо по прессовой посадке, либо по посадке скольжения, с зазором от 0 до нескольких десятков микрометров. Это обеспечивает незначительный проворот вспомогательной оси (7) во втулке (16) при обеспечении соосности вспомогательной оси (7) к выходному валу (9) и шарового подшипника (6) прецессирующего зубчатого колеса (3), например, во время совершения нутации осью прецессирующего зубчатого колеса (3). А также при работе зубчатых колес в режиме дифференциала (в случае различия количества зубьев зубчатого колеса корпуса (2) и зубьев прецессирующего зубчатого колеса (3).
Индукционные катушки (10) корпуса (1) с зубчатым колесом корпуса (2) размещены по окружности в периферийной части прецессирующего зубчатого колеса (3) с зазором («а») между торцом катушки и плоской поверхностью прецессирующего зубчатого колеса (3). Количество индукционных катушек (10) должно быть не менее трех. Количество индукционных катушек (10) зависит от требуемой величины ЭДС, которую получают для достижения требуемой величины момента вращения на выходном валу (9) мотор-редуктора. Оптимальное количество соленоидов для варианта 1-6 (шесть) индукционных катушек (10) с подвижными сердечниками (11).
Сердечник (11) каждой индукционной катушки (10) выполнен выступающим за ее торец и может иметь, например, сферический торец. Сердечник (11) каждой индукционной катушки (10) выполнен подвижным из магнитомягкой стали и образует с ней соленоид. Сферический торец сердечника может быть выполнен сферическим для минимизации воздушного зазора с прецессирующим зубчатым колесом (3).
В выдвинутом положении сердечник (11) без зазора прижат к плоской поверхности прецессирующего зубчатого колеса (3), а в убранном положении образует с его поверхностью зазор, больший (не менее) величины прецессии в продольном направлении вспомогательной оси. Сердечник может быть подпружинен для более плотного прижатия в поверхности или для возврата его в нормально выдвинутое положение.
Группа индукционная катушка-сердечник образует соленоид.
В данном описании группы изобретений используют термин соленоид как разновидность электромагнитов (магнитопроводов). В рассматриваемом случае соленоид - это однослойная (или многослойная) катушка цилиндрической формы, витки которой намотаны вплотную, а длина значительно больше диаметра.
Во всех трех вариантах конструкции соленоиды характеризуются значительным соотношением длины намотки к диаметру оправки (сердечника), что позволяет создать внутри катушки относительно равномерное магнитное поле.
Соленоид обычно снабжается внешним магнитопроводом. Внутренний магнитопровод в рассматриваемой конструкции выполнен в виде сердечника как подвижного (вариант 1), так и неподвижного (вариант 2), или отсутствовать вовсе (вариант 3). В варианте 3 магнитопровод может быть из полос магнитомягкой стали с пазами, на которые намотаны обмотки в том порядке, как это делают на статорах шаговых или асинхронных двигателей.
Соленоидами управляют посредством управляющего блока, который обеспечивает подачу на индукционные катушки (10) от источника тока ток с широтно-импульсной модуляцией в зависимости от режима работы мотор-редуктора.
Таким образом, источник электромагнитного потока получают на соленоидах, которые всегда конструктивно соединены с корпусом (1) мотор-редуктора и с зубчатым колесом (2).
Прецессирующее зубчатое колесо (3), на котором жестко прикреплены и зубчатый венец и периферийные элементы, например, из прочной стали (вариант 1) или магнитомягкой стали (вариант 2), совместно с магнитным потоком на статоре формируют магнитодвижущую силу (МДС), заставляющую прецессировать прецессирующее зубчатое колесо (3). Другими словами, прецессирующее зубчатое колесо (3) можно назвать зубчатый прецессирующий ротор мотор-редуктора.
Выходной вал (9), на котором жестко закреплено зубчатое колесо (8) с торцевыми зубьями (5), вращается в крышке (13) корпуса (1) мотор-редуктора.
В варианте 1 статор представляет собой совокупность соленоидов с выдвижными сердечниками, а на прецессирующем роторе только плоские поверхности, которые могут быть, в частности, просто накладками из прочной стали.
Предложенная конструкция мотор-редуктора обеспечивает увеличение ресурса, повышения точности поворота выходного вала и увеличение крутящего момента на выходном валу при упрощении конструкции.
Система работает следующим образом.
В процессе появления в соленоидах магнитодвижущей силы (МДС), сердечники поочередно выдвигаются из индукционных катушек и нажимают на плоскую периферийную часть прецессирующего зубчатого колеса. Контакт с поверхностью колеса (3) сердечников может происходить от максимального воздействия до отсутствия контакта (обеспечиваемого пружинами). При этом промежуточные сердечники будут либо нажимать на колесо (3), но с меньшим усилием (а значит и сдвигать его на меньшую величину), либо контакта не будет и зазор между ними будет распределяться по сердечникам от максимального зазора до минимального. В частном случае воздействуют с разными усилиями на колесо (3) не более трех сердечников (11) и соответственно не воздействуют - остальные. Величина МДС, воздействующая на прецессирующий ротор, каковым является прецессирующее зубчатое колесо (3), есть вектор МДС, направленный параллельно оси O-O1 при регулярной прецессии. В случае наличия малых углов нутации, ось O-O1 может совершать поворот на очень малый угол, осуществляя нутацию. Увеличение этого угла приведет к недопустимой вибрации. Такой поворот возможен только при исполнении по вариантам 1 и 2. МДС формируется за счет источника электромагнитного потока статора. После снятия МДС сердечник убирается за счет МДС, направленной в противоположную первоначальному воздействию сторону. Таким образом прецессирующее зубчатое колесо имеет возможность совершать прецессию относительно вспомогательной оси или OO1. За счет того, что зубчатые венцы зубчатых колес корпуса (2) и прецессирующего колеса (3) входят в жесткое зацепление, а зубчатое колесо корпуса (2) монолитно расположено на корпусе (1), прецессия осуществляется без проворота зубчатого колеса (3). В случае проворота зубчатого колеса (3), передаточное число будет существенно увеличиваться, так же как и точность угла поворота выходного вала (9), а крутящий момент на выходном валу (9) - уменьшаться. Такой вариант исполнения наилучшим образом можно использовать в приборных мотор-редукторах, где не требуется большого крутящего момента. При этом происходит либо регулярная прецессия (без нутации), если вспомогательная ось полностью соосна с осью выходного вала, либо полная прецессия (с нутацией), если вспомогательная ось имеет возможность отклоняться на малые углы от продольной оси выходного вала. В силу того, что один конец вспомогательной оси закреплен во втулке корпуса, а также того, что зубчатые венцы прецессирующего зубчатого колеса (3) и зубчатого колеса вала (8) сопрягаются и имеют разницу в количестве зубцов не менее единицы, происходит проворот выходного вала на заданный угол с большой точностью. При частичном провороте вспомогательной оси в корпусе или прецессирующего зубчатого колеса вокруг ее продольной оси - благодаря отсутствию люфтов в кинематической цепи мотор-редуктора. При этом, в случае использования мотор-редуктора в приводе с обратной связью по положению (режим - следящего по положению привода), возможно получить точность угла поворота на выходном валу с погрешностью, предопределяемой разрешающей способностью датчика обратной связи, т.е. измеряемой единицами угловых секунд.
В случае полной соосности вспомогательной оси с выходным валом и жесткого закрепления вспомогательной оси в корпусе, а также полного отсутствия проворота прецессирующего зубчатого диска, при условии мощных соленоидов статора, на валу наиболее целесообразно получать значительные вращающие моменты для рассматриваемого варианта - до - 5,0 НМ.
Конструкция мотор-редуктора по вариантам 2 и 3 в основных частях, таких как корпус с жестко закрепленным зубчатым колесом, выходной вал с жестко закрепленным на нем зубчатым колесом, вспомогательная ось, а также крепление прецессирующего зубчатого колеса и расположение зубчатых венцов на нем, как и зацепление вышеуказанных зубчатых колес, такое же как описано в варианте 1. Однако в варианте 3 нутация не допустима, т.к. она неблагоприятным образом влияет на точность угла поворота.
В варианте 2 вышеуказанный технический результат достигается за счет того, что используют индукционные катушки с неподвижным сердечником.
ВАРИАНТ 2
Известно изобретение «Электродвигатель», патент RU 2030082, опубл. 27.02.1995, МПК H02K 41/06, содержащий установленный в корпусе статор с магнитопроводом и ротор с магнитом, при этом ротор и статор связаны кинематической парой, выполненной в виде зубчатой передачи. Изобретение позволяет повысить надежность и улучшить статические и динамические характеристики электродвигателя. Назначением данной конструкции в электромашиностроении является, в частности, выполнение функции электропривода, но который не позволяет осуществить увеличение точности поворота выходного вала и/или крутящего момента на выходном валу за счет, в частности, устранения люфта в зубчатом зацеплении, которое также обеспечивает необходимое передаточное число. В рассматриваемой конструкции отсутствует прецессирующее колесо, а также эта конструкция не позволяет работать в различных режимах дискретно-непрерывного или непрерывного вращения выходного вала. Более того, данное устройство имеет низкую надежность, а также значительные динамические перегрузки, что снижает ее надежность. Кроме того, эксцентрично установленный ротор при передаче реакции крутящего момента через зубчатое зацепление, зубья колес испытывают высокие нагрузки и имеют большой люфт, приводящие к быстрому износу зубьев, что ограничивает использование данной конструкции в силовых механизмах.
Известно изобретение «Коническая волновая передача», RU 2145016, опубл. 27.01.2000, МПК F16H 1/32, снабженная корпусом, по меньшей мере двумя установленными с возможностью зацепления конических зубчатых колеса с торцевыми венцами, одно из которых установлено неподвижно в окружном направлении относительно корпуса и с возможностью качания в осевом направлении под действием генератора колебаний, а другое колесо закреплено на выходном валу. Передача использует генератор колебаний, функцией которого является только осуществление прецессионного движения колеса, однако эта конструкция сложна и технологически дорогостояща. Кроме того, генератор колебаний выполнен в виде косого кривошипа, связанного с входным валом, что повышает вибрацию и увеличивает люфты при качании в осевом направлении зубчатого колеса. Генератор не использует электромагнитные силы, поэтому конструкция намного сложнее и менее надежна. Конструкция не является мотор-редуктором, поскольку выполняет только функцию редуктора и имеет входной силовой вал.
Известна полезная модель «Торцевой волновой электродвигатель», патент RU 99666, опубл. 20.11.2010, МПК H02K 41/06, снабженный обмоткой, выполненной в виде катушек, выходной вал с жестким зубчатым колесом, а непосредственно электродвигатель выполнен ступенчатым, ступени которого выполнены с разными передаточными отношениями, при этом обмотка выполнена в виде электромагнитных катушек, расположенных на полюсных наконечниках жесткого колеса, и на промежуточном колесе размещены магнитные накладки. Однако в этой конструкции ротор, выполненный в виде гибкого колеса, и гибкое колесо второй ступени электродвигателя жестко связано с первичным выходным валом. Вследствие того, что имеется гибкое промежуточное колесо невозможно обеспечить его прецессирующего движения, а также наличие гибких элементов существенно снижает надежность конструкции, ее износоустойчивость, а следовательно, ресурс изделия. Кроме того, требуется решать задачу устойчивости гибких элементов. Таким образом, невозможно достичь увеличения точности угла поворота и/или крутящего момента на выходном валу, в частности, из-за счет невозможности устранения люфта в зубчатом зацеплении. Данная конструкция не обеспечивает работу в различных режимах: дискретно-непрерывного или непрерывного вращения выходного вала и при этом имеет значительные величины вибрации.
Известно изобретение «Волновой электродвигатель с внутренним статором», патент RU 2292107, опубл. 15.02.2005, МПК H02K 41/06, в котором имеется статор с индукционными обмотками, ротор и магниточувствительный элемент, контактирующий без проскальзывания с ротором. Изобретение позволяет повысить технологичность при изготовлении, упростить конструкцию и повысить электромагнитный момент волнового электродвигателя. Однако гибкий стальной цилиндр не обладает достаточной механической надежностью при продолжительной работе электродвигателя, а также такой электродвигатель создает значительные шумы во время работы при перемещении пластин и соударении со статором. Кроме того, он не имеет функции планетарной передачи и не позволяет существенно увеличить точность угла поворота и/или крутящего момента на выходном валу.
Наиболее близкой конструкцией для второго варианта представленной группы изобретений является изобретение «Планетарный электромотор-редуктор», патент RU 2294587, опубл. 27.02.2007, МПК H02K 7/116, F16H 1/32, который снабжен корпусом, зубчатым колесом редуктора и промежуточным зубчатым колесом (шестерней), причем зубчатое колесо первой ступени редуктора выполняет функцию статора электродвигателя и снабжено катушками электромагнитов, выполнено с зубьями, входящими в зацепление с зубьями промежуточного зубчатого колеса. Однако шестерня планетарного редуктора выполняет функцию сателлит-якоря электродвигателя, на котором установлен торцевой коллектор с токоподводящими и токоотводящими контактами. Наличие эксцентрично поворачивающего коллектора приводит к возникновению дополнительных затрат на преодоление трения, а также на разъем контактов, в которых может возникать искрение, что существенно снижает долговечность, надежность и уменьшение точности по углам поворота и/или уменьшение точности получения заданной величины крутящего момента на выходном валу.
Данное изобретение позволяет избежать люфтов в контактирующих звеньях и тем самым повысить точность передачи. Наличие объединенных первой и второй ступеней редуктора в качестве статора, при связывании 1-й ступени с корпусом позволяет обеспечить передачу реакции крутящего момента на корпус. Однако предложенная конструкция не позволяет получить нажимное усилие, под действием которого перемещается прецессирующее зубчатое колесо, а следовательно, не обеспечивает необходимого увеличения точности и/или крутящего момента на выходном валу. Кроме того, конструкция по данному изобретению не обеспечивает работу в различных режимах: дискретно-непрерывного или непрерывного вращения выходного вала. В связи с тем, что торцевой коллектор электродвигателя имеет возможность вращения эксцентрично относительно корпуса, за счет чего обеспечивается смещение фазы электродвижущей силы (ЭДС) электродвигателя, режим работы такого электродвигателя очень ограничен, кроме того, он работает неустойчиво, поскольку смещение фазы с помощью эксцентрично вращающегося коллектора всегда будет неравномерно.
Из уровня техники известны конструкции, в которых ротор выполнен в виде гибкого колеса (см. патент RU 2418351). В этом случае гибкое колесо теоретически имеет меньшую, чем жесткие детали, усталостную прочность. Однако, как показывает практика, с жесткими зубчатыми венцами на них такие роторы не создаются, как в прочем и просто волновые торцевые редукторы с гибкими дисками.
В заявляемой конструкции этот недостаток преодолен, и, кроме того, реализуются наилучшим образом возможности катушек индуктивности. Кроме того, в предложенном в заявке техническом решении возможно создавать много модификаций катушек индуктивности. Таким образом, также достигается увеличение ресурса, точности угла поворота выходного вала и получения крутящего момента на выходном валу при упрощении конструкции.
Данный технический результат достигается за счет того, что в варианте 2 используют индукционные катушки с неподвижным сердечником.
Общим с прототипом является то, что мотор-редуктор содержит корпус, снабженный зубчатым колесом, которое является зубчатым колесом редуктора, и корпус с индукционными катушками выполняет функцию статора электродвигателя, корпус снабжен индукционными катушками (электромагнитами типа соленоид) и мотор-редуктор снабжен промежуточным зубчатым колесом. Причем зубчатое колесо корпуса выполнено с зубьями, входящими в зацепление с зубьями промежуточного зубчатого колеса. Передоложенная конструкция по варианту 2 отличается тем, что корпус жестко связан или выполнен монолитно с зубчатым колесом корпуса и снабжен индукционными катушками с неподвижным сердечником. Промежуточное зубчатое колесо выполнено в виде прецессирующего зубчатого колеса с расположенными с обеих сторон двумя зубчатыми венцами, и закреплено с возможностью прецессионного движения. В одном исполнении прецессирующее зубчатое колесо осуществляет прецессию за счет его соединения посредством шаровой опоры, например, сферических подшипников на вспомогательной оси, а в другом варианте оно совершает прецессию за счет того, что удерживается только за счет зубчатого защепления в зубчатом колесе корпус с одной стороны и зубчатого зацепления в зубчатом колесе вала - с другой стороны. При этом вспомогательная ось и выходной вал выполнены как единое целое и совместно вращаются в корпусе. Прецессирующее зубчатое колесо в обоих вариантах исполнения осуществляет прецессионное движение как полную прецессию, т.е. регулярная прецессия и нутация на малые углы. Зубчатое колесо корпуса и промежуточное зубчатое колесо (выполненное в виде прецессирующего зубчатого колеса) выполняют совместно функцию зубчатой муфты или первой ступени ротора, в зависимости от одинакового количества зубьев (муфта) или отличного количества зубьев (первая ступень редуктора). На плоской поверхности прецессирующего зубчатого колеса размещены накладки напротив индукционных катушек корпуса с зубчатым колесом, равные числу индукционных катушек. Накладки выполнены из магнитомягкой стали или любого другого ферромагнитного материала с малым магнитным сопротивлением. Мотор-редуктор снабжен дополнительно зубчатым колесом вала, жестко закрепленным на выходном валу, при этом с одной стороны зубчатый венец прецессирующего зубчатого колеса входит в зацепление с зубьями зубчатого колеса корпуса, а с другой стороны зубчатый венец прецессирующего зубчатого колеса входит в зацепление с зубьями зубчатого колеса вала. Вспомогательная ось закреплена одним концом в корпусе, например, жестко по прессовой посадке, или с возможностью технологического проворота, если по скользящей посадке, а другим - в глухой расточке на выходном валу с возможностью поворота относительно оси выходного вала. В другом варианте исполнения вспомогательная ось выполнена с выходным валом как единое целое и они закреплены в корпусе на двух подшипниках. Индукционные катушки корпуса с зубчатым колесом размещены по окружности в периферийной части промежуточного колеса с зазором между торцом сердечника катушки и плоской поверхностью накладки промежуточного зубчатого колеса. Сердечник соответствующей индукционной катушки выполнен выступающим за ее торец и при подаче на данную индукционную катушку максимального (расчетного) тока, по- возможности прижат к накладке прецессирующего зубчатого колеса, что обеспечивает перемещение прецессирующего зубчатого колеса в точке контакта на заданную (расчетную) величину прецессии в продольном направлении вспомогательной оси с сохранением полного зацепления зубчатых венцов зубчатого колеса корпуса и соответствующего зубчатого венца прецессирующего зубчатого колеса. При этом сердечники других индукционных катушек образуют зазор между торцом сердечника и накладкой прецессирующего зубчатого колеса, которые размещены на промежуточном зубчатом колесе напротив соответствующей ей индукционной катушки, обеспечивая зазор не менее величины прецессии прецессирующего зубчатого колеса в продольном направлении вспомогательной оси. Выходной вал закреплен одним концом посредством подшипников в крышке корпуса с возможностью поворота, а другим концом посредством глухой расточки - со вспомогательной осью, в другом исполнении выполнен вместе со вспомогательной осью. Причем зубчатые венцы всех зубчатых колес снабжены торцевыми зубьями и зубчатое колесо корпуса имеет одинаковое или, по меньшей мере, на один зуб меньше, чем число зубьев зубчатого венца, обращенного к нему, прецессирующего зубчатого колеса, расположенного на прецессирующем зубчатом колесе с его стороны, а зубчатый венец на прецессирующем зубчатом колесе, расположенный со стороны зубчатого колеса вала, имеет, по меньшей мере, число зубьев на единицу больше, чем число зубьев зубчатого колеса вала. В частных случаях исполнения профиль зубьев зубчатых колес выполнен эвольвентным, или циклоидальным, или эпициклоидальным, как укороченным, так и удлиненным. В корпусе по окружности могут быть размещены по меньшей мере три индукционные катушки, количество которых зависит от требуемой величины крутящего момента на выходном валу. Сердечник каждой индукционной катушки неподвижный и может быть выполнен, например, из магнитомягкой стали, при этом снабжен сферическим торцем. Накладки могут быть ферромагнитными накладками и выполнены круглыми или секционными. Вспомогательная ось может быть выполнена закрепленной одним концом в корпусе с возможностью технологического проворота. В частном случае второй конец вспомогательной оси может быть уперт в торец глухой втулки выходного вала посредством шаровой опоры. Например, на мотор-редуктор подают посредством внешнего управляющего блока на индукционных катушках постоянный или переменный ток с широтно-импульсной модуляцией в зависимости от режима работы статора мотор-редуктора.
Представленное техническое решение поясняется чертежами, в которых показаны примеры, не исчерпывающие всех вариантов возможных схем подключения управляющих блоков и иных блоков и устройств, необходимых для функционирования мотор-ротора, а также не охватывают всех возможных схем размещения и типов магнитопроводов на корпусе и модификаций конструктивного исполнения деталей. Чертежи демонстрируют наиболее общие принципы конструктивного решения варианта 2.
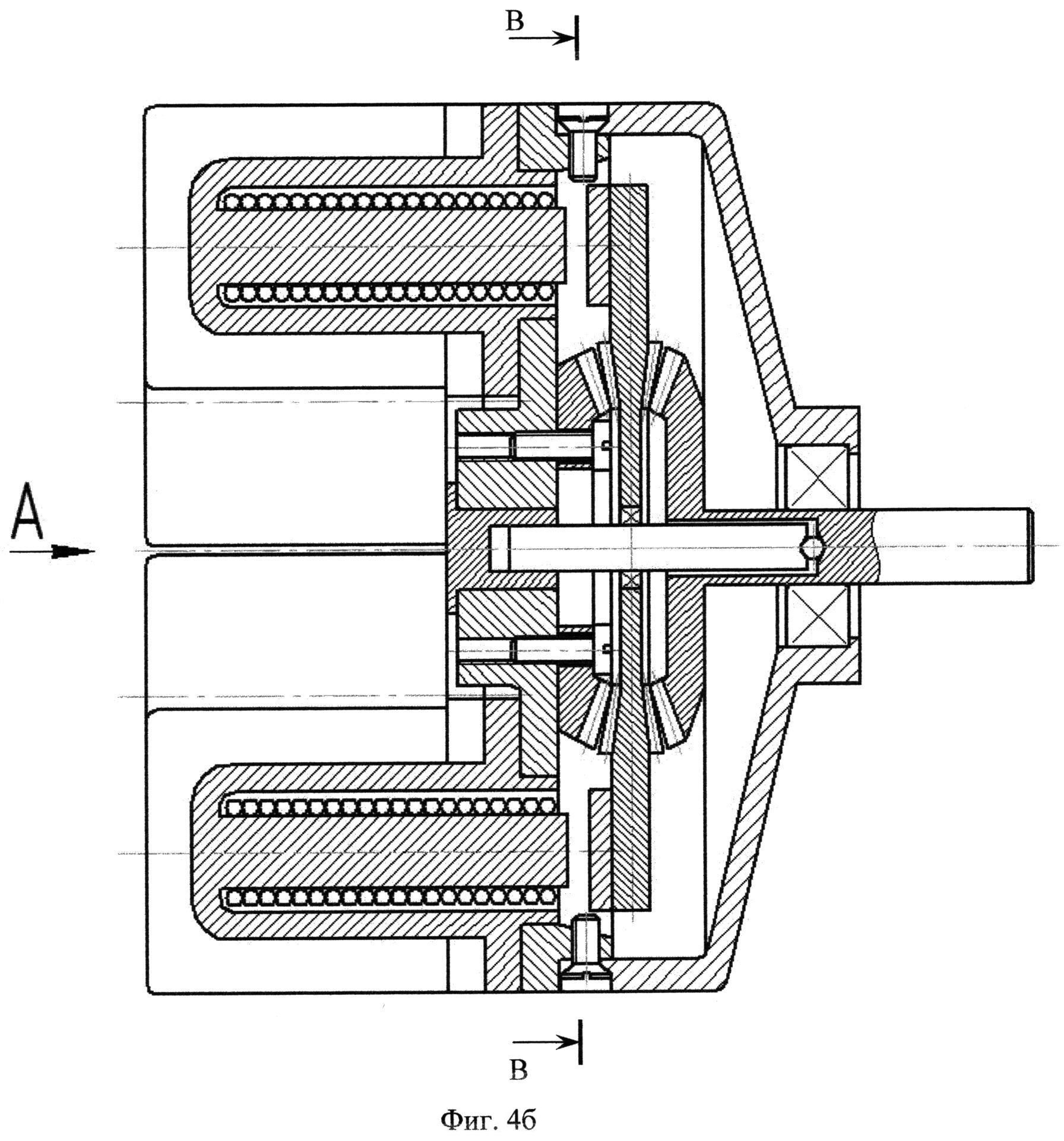
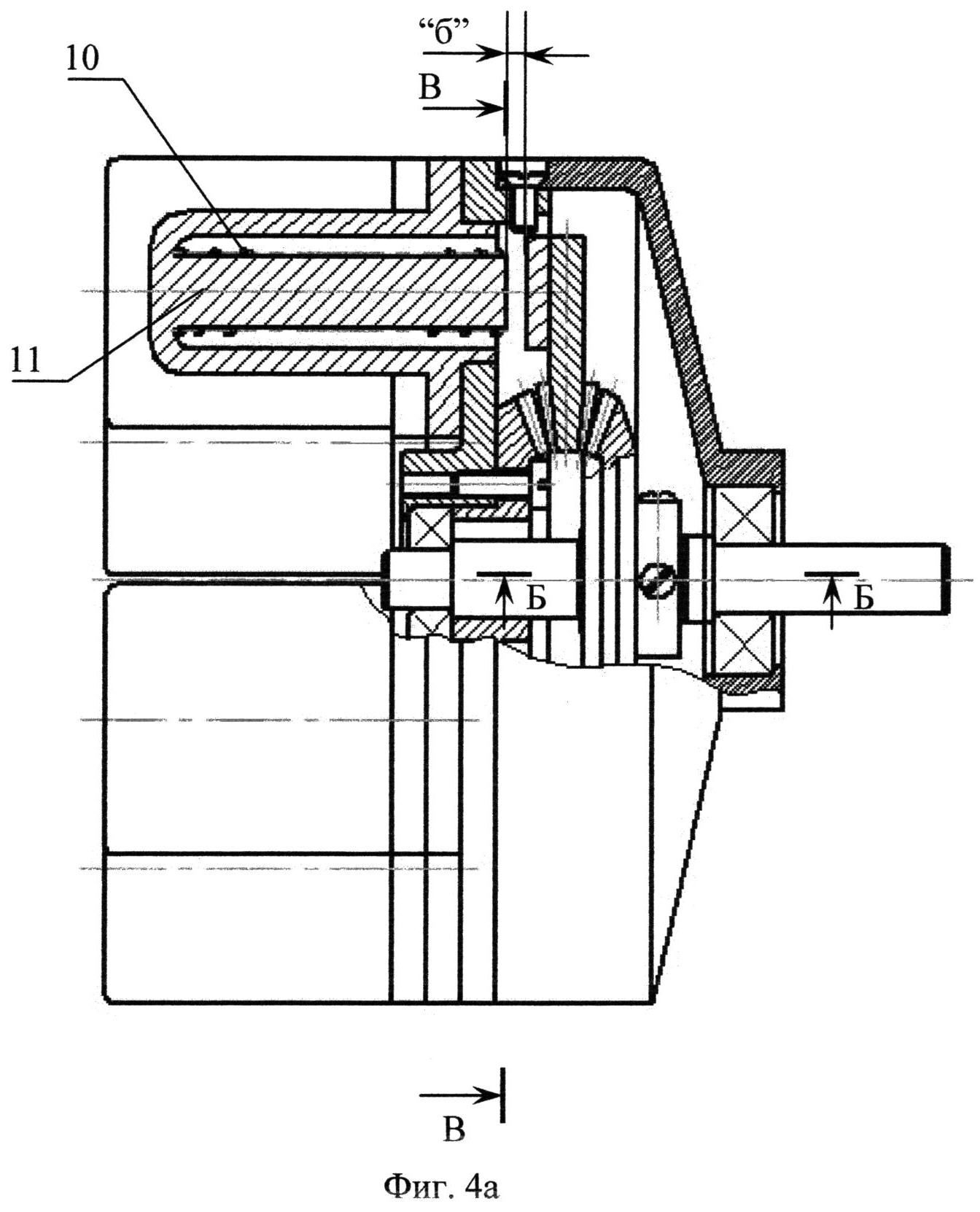
На Фиг.4а и б показано продольное сечение мотор-редуктора, снабженного индукционными катушками с неподвижным сердечником по Варианту 2; исполнение «а» - со вспомогательной осью, являющейся с выходным валом единой сборкой. Исполнение «б» - со вспомогательной осью, соединенной с выходным валом посредством глухой расточки с шаровой опорой и с возможностью вращения выходного вала вокруг вспомогательной оси.
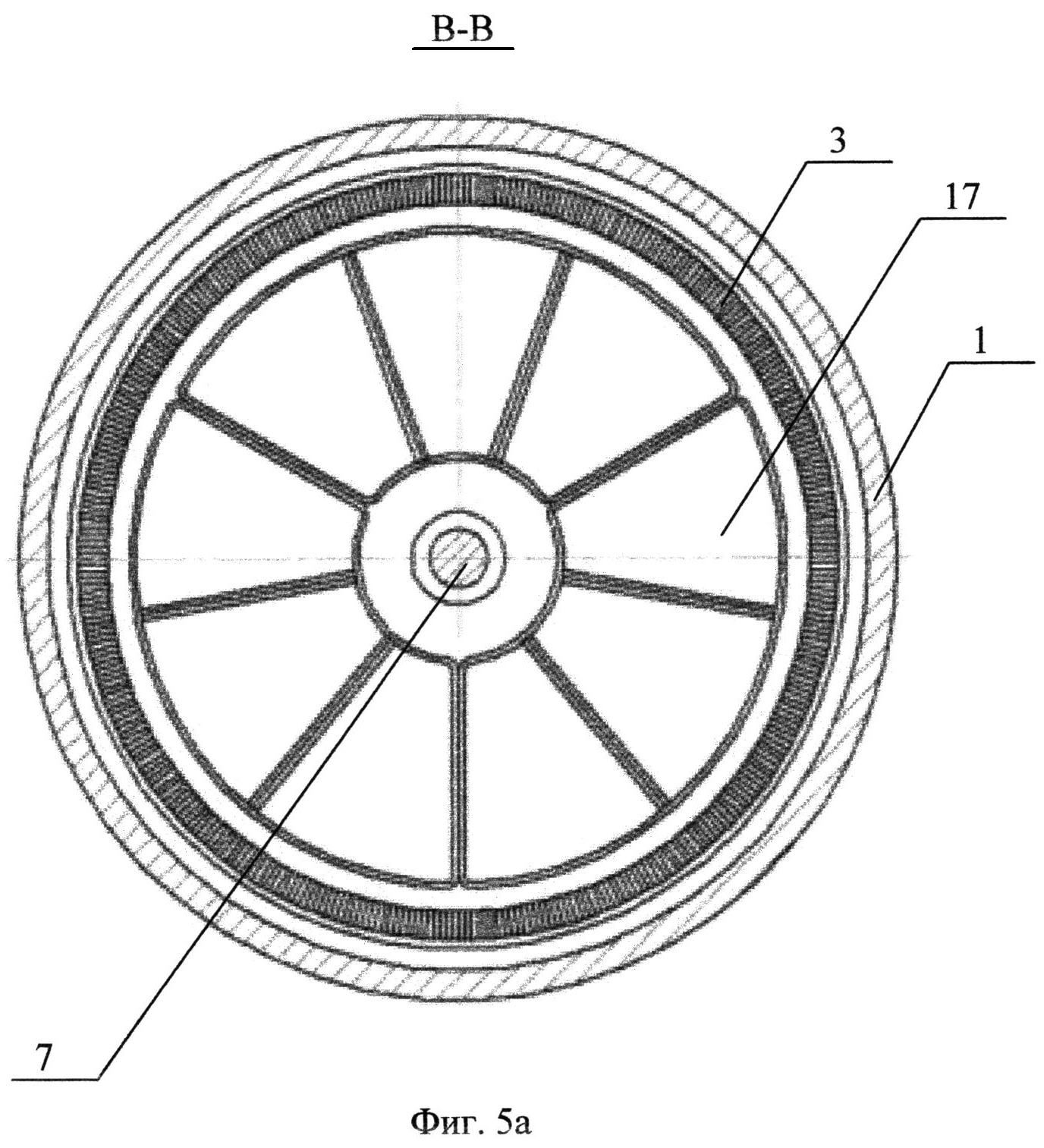
На Фиг.5а и б показано сечение, на котором видны накладки из магнитомягкой стали, корпус (1) и прецессирующее зубчатое колесо (3); а - с накладками сегментовидными, б - с накладками прямоугольными.
Конструкция мотор-редуктора по варианту вала в основных его конструктивных элементах, таких как корпус (1), зубчатое колесо корпуса (2), крепление прецессирующего зубчатого колеса (3) на вспомогательной оси (7), крепление вспомогательной оси (7) в корпусе (1) и в выходном валу (9), зубчатое колесо вала (8) и выходной вал (9) выполнены аналогично конструкции варианта 1.
Однако на прецессирующем зубчатом колесе предусмотрены накладки (17) из магнитомягкой стали.
Индукционные катушки (10) корпуса (1) с зубчатым колесом корпуса (2) размещены по окружности в периферийной части прецессирующего зубчатого колеса (3) с зазором («б») между торцом сердечника (11) катушки (10) и плоской накладкой (17) на поверхности прецессирующего зубчатого колеса (3). Накладки могут быть выполнены секционными или сплошными, а также в форме круга, сегмента или иной формы. Накладки (17) на плоской поверхности прецессирующего зубчатого колеса (3) (там, где нет зубьев) накладки (17) выполнены из магнитомягкой стали или иного ферромагнитного материала с малым магнитным сопротивлением и размещены напротив индукционных катушек (10) корпуса с зубчатым колесом, равные числу индукционных катушек.
Катушки индуктивности выполнены с неподвижными сердечниками.
Количество индукционных катушек (10) должно быть не менее трех. На Фиг.5а показаны накладки из магнитомягкой стали, соответствующие девяти катушкам индуктивности (10). Количество индукционных катушек (10) зависит от требуемой величины эдс, которую получают для достижения требуемой величины момента вращения на выходном валу (9) мотор-редуктора. Оптимальное количество соленоидов для варианта 2-9 (девять) индукционных катушек (10) с неподвижными подвижными сердечниками (11).
Сердечник (11) каждой индукционной катушки (10) выполнен выступающим за ее торец и может иметь, например, сферический торец. Сердечник (11) каждой индукционной катушки (10) выполнен неподвижным из магнитомягкой стали и образует с ней соленоид. Торец сердечника может быть выполнен сферическим для минимизации воздушного зазора с прецессирующим зубчатым колесом (3).
При подаче на соответствующую индукционную катушку максимального (расчетного) тока, сердечник (11) прижат к накладке (17) прецессирующего зубчатого колеса (3), что обеспечивает перемещение прецессирующего зубчатого колеса (3) в точке контакта на заданную (расчетную) величину его прецессии в продольном направлении вспомогательной оси (7) с сохранением полного зацепления зубчатых венцов зубчатого колеса корпуса (2) и соответствующего зубчатого венца прецессирующего зубчатого колеса (3). При этом прижатие сердечника (11) обеспечено за счет притягивания к нему прецессирующего зубчатого колеса (3).
При этом сердечники (11) других индукционных катушек (10) образуют зазор «б» между торцом сердечника и накладкой (17) прецессирующего зубчатого колеса (3), размещенные на промежуточном зубчатом колесе (3) напротив соответствующей ей индукционной катушки (10), обеспечивая зазор не менее величины прецессии прецессирующего зубчатого колеса в продольном направлении вспомогательной оси (7).
Все модификации исполнений, крепления вспомогательной оси, количества зубьев сопрягаемых колес и варианта крепления прецессирующего колеса (3) применимы и к варианту 2.
Система работает следующим образом.
При подаче поочередно на индукционные катушки максимального (расчетного) тока от источника постоянного или переменного тока с широтно-импульсной модуляцией в зависимости от режима работы прецессирующего ротора мотор-редуктора, что обеспечивается управляющим блоком (на чертежах не показан), сердечник соответствующей индукционной катушки сферическим торцом (ПОЧТИ) прижимается к ферромагнитной накладке прецессирующего зубчатого колеса за счет возникающего в продольном направлении (по оси O-O1) МДС, накладка (17) прижимается к сердечнику. После снятия МДС прецессирующее зубчатое колесо (3), являющееся прецессирующим ротором, отходит от сердечника (И) за счет прижатия следующей накладки к сердечнику. При этом прецессирующий ротор, как и в варианте 1, совершает либо регулярную прецессию, либо полную прецессию, в зависимости от модификации исполнения. В силу того, что один конец вспомогательной оси закреплен во втулке корпуса, а также того, что зубчатые венцы прецессирующего зубчатого колеса (3) и зубчатого колеса вала (8) сопрягаются и имеют разницу в количестве зубцов не менее единицы, происходит проворот выходного вала на заданный угол с большой точностью. Все варианты работы, описанные в варианте 1. можно реализовать и в варианте 2.
Для варианта 2 может быть достигнута точность угла поворота выходного вала (9) с теми же погрешностями, что и при варианте 1, также сохраняются и преимущества по крутящему моменту, но вариант 2 целесообразен в случае, если необходимо иметь более высокую скорость выходного вала.
В варианте 3 вышеуказанный технический результат достигается за счет того, что используют индукционные катушки в виде магнитопроводов с торцевыми обмотками.
ВАРИАНТ 3
Известно изобретение «Волновой электродвигатель», патент RU 2289186, опубл. 10.12.2006, МПК H02K 41/06, в котором в корпусе размещены статор и индукционные катушки с сердечником, магниточувствительный элемент и силовой диск размещен с возможностью перемещения. При этом в частном случае магниточувствительный элемент выполнен в виде ряда ферромагнитных пластин, аксиальные сердечники выполнены из ферромагнитного материала. И индукционная катушка может быть образована путем плотно намотанной в один слой ферромагнитной проволоки, к внутренней поверхности которой присоединены аксиальные штыри (сердечники), средние участки которых соединены с каждым витком ферромагнитной проволоки. Изобретение позволяет повысить электромагнитный момент волнового электродвигателя. Однако гибкий магниточувствительный элемент, выполненный в виде плотно намотанной в один слой ферромагнитной проволоки, создает проблемы при его изготовлении, монтаже и ремонте, является технологически сложным и понижает ресурс электродвигателя. Передача электромагнитного момента от магниточувствительного элемента осуществляется через аксиальные штыри на два силовых диска, закрепленных жестко на валу электродвигателя. Это исключает возможность использования прецессирующего диска, т.е. не позволяет увеличить точность угла поворота вала и/или крутящего момента на выходном валу. Кроме того, наличие гибких элементов существенно снижает надежность конструкции, поскольку требуется обеспечивать устойчивости этих гибких элементов.
Известно изобретение «Торцевой волновой электродвигатель», патент RU 2418351, опубл., 10.05.2011, МПК H02K 41/06 H02K 41/00, в корпусе которого размещен статор, гибкое промежуточное колесо с торцевыми зубьями, выходной вал с жестким зубчатым колесом с торцевыми зубьями и электромагнитные катушки, а постоянные магниты расположены напротив каждой катушки индуктивности. Изобретение позволяет повысить быстродействие благодаря увеличению максимальной частоты переключения фаз электромагнитных катушек, увеличению частоты приемистости двигателя. Однако в изобретении не решена задача повышения точности и/или крутящего момента на выходном валу за счет устранения люфта в зубчатом зацеплении и увеличения ресурса и обеспечения возможности работы в различных режимах: дискретно-непрерывном или непрерывном вращении выходного вала.
Как и для вариантов один и два, для варианта три наиболее близким аналогом, который взят за прототип, является изобретение «Планетарный электромотор-редуктор», патент RU 2294587, опубл. 27.02.2007, МПК H02K 7/116, F16H 1/32, который снабжен корпусом, зубчатым колесом редуктора и промежуточным зубчатым колесом (шестерней), причем зубчатое колесо первой ступени редуктора выполняет функцию статора электродвигателя и снабжено катушками электромагнитов. В данной конструкции низкая частота переключений фаз электромагнитных катушек, выражающаяся в малом быстродействии из-за большой массы подвижных якорей, соединенных с шихтованными магнитопроводами, не позволяет обеспечить работу мотор-рдуктора в разных режимах, а также не позволяет обеспечить требуемой точности угла поворота и/или крутящего момента на выходном валу. Кроме того, у данной конструкции на шестерне установлен торцевой коллектор с токоподводящими и токоотводящими контактами, который усложняет конструкцию и из-за вращения коллектора эксцентрично относительно корпуса создает возникновение дополнительных затрат на преодоление трения, а также на разъем контактов, в которых может возникать искрение, что существенно снижает долговечность и надежность.
В варианте 3 вышеуказанный для всех вариантов технический результат достигается за счет того, что по сути статор - это корпус с жестко закрепленным на нем зубчатым колесом (2), и корпус снабжен круглым магнитопроводом. Индукционные катушки выполнены, например, в виде магнитопровода с пазами, в которых размещены обмотки, (подобно статорам обычных торцевых электродвигателей различных типов), а на прецессирующем роторе (прецессирующем зубчатом колесе (3) размещены накладки из высокоэнергетических постоянных магнитов (так же, как у тех же торцевых электродвигателей различных типов).
Общим с прототипом является то, что мотор-редуктор содержит корпус, снабженный зубчатым колесом, которое является зубчатым колесом редуктора, и корпус с индукционными катушками выполняет функцию статора электродвигателя, корпус снабжен индукционными катушками (электромагнитами типа магнитопровода с обмотками) и мотор-редуктор снабжен промежуточным зубчатым колесом. Причем зубчатое колесо корпуса выполнено с зубьями, входящими в зацепление с зубьями промежуточного зубчатого колеса. Предоложенная конструкция по варианту 3 отличается тем, что корпус жестко соединен с зубчатым колесом корпуса и индукционными катушками, которыми снабжен корпус, выполненными в виде обмоток статора бесколлекторного торцевого двигателя, промежуточное зубчатое колесо выполнено в виде прецессирующего зубчатого колеса с расположенными с обеих сторон двумя зубчатыми венцами и закреплено посредством сферических опор, в частности сферических подшипников, на вспомогательной оси с возможностью прецессионного движения. На его плоской поверхности размещены накладки из высокоэнергетических постоянных магнитов, расположенных напротив индукционных катушек корпуса с зубчатым колесом, равные числу индукционных катушек. Индукционные катушки корпуса с зубчатым колесом выполняют функцию статора бесколлекторного двигателя и размещены по окружности в периферийной части прецессирующего зубчатого колеса с зазором между торцом обмотки индукционной катушки и плоской поверхностью высокоэнергетического постоянного магнита, обеспечивая зазор не более величины прецессии прецессирующего зубчатого колеса в продольном направлении вспомогательной оси. Мотор-редуктор снабжен дополнительно зубчатым колесом вала, жестко закрепленным на выходном валу. При этом с одной стороны зубчатый венец прецессирующего зубчатого колеса входит в зацепление с зубьями зубчатого колеса корпуса, а с другой стороны зубчатый венец прецессирующего зубчатого колеса входит в зацепление с зубьями зубчатого колеса вала. Вспомогательная ось закреплена одним концом жестко в корпусе, а другим - в глухой расточке на выходном валу с возможностью поворота относительно оси выходного вала. В частном случае индукционные катушки выполнены как магнитопровод с пазами, в которых размещены обмотки. Выходной вал закреплен одним концом посредством подшипников в крышке корпуса, а другим концом - посредством глухой расточки со вспомогательной осью. Причем зубчатые венцы всех зубчатых колес снабжены торцевыми зубьями и зубчатое колесо корпуса имеет одинаковое число (а, при необходимости и различное - смотри вариант 1) зубьев с зубчатым прецессирующим зубчатым колесом со стороны зубчатого венца, расположенного на прецессирующем зубчатом колесе с его стороны, т.е. зубчатое колесо корпуса имеет одинаковое или по меньшей мере на единицу меньше числа зубьев, чем зубчатый венец прецессирующего зубчатого колеса, расположенного на прецессирующем зубчатом колесе с его стороны, а зубчатый венец на прецессирующем зубчатом колесе, расположенный со стороны зубчатого колеса вала, имеет, по меньшей мере, число зубьев на единицу больше, чем число зубьев зубчатого колеса вала. Так, например, профиль зубьев зубчатых колес выполнен эвольвентным, или циклоидальным, или эпициклоидальным. В частности, циклоидальный профиль зубьев зубчатых колес может быть выполнен гипоциклоидальным - укороченным или удлиненным, так же как и профиль эпициклоидальных зубьев - укороченным или удлиненным. В корпусе по окружности размещены по меньшей мере три индукционные катушки, количество которых зависит от требуемой величины крутящего момента на выходном валу. Наиболее оптимальным является шесть магнитопроводов с размещенными на них обмотками. Одноименные магнитные полюса накладок из высокоэнергетических постоянных магнитов должны располагаться с одной стороны. Также постоянные магниты могут быть заменены на индукционные катушки. Индукционные катушки могут также быть выполнены в виде магнитопроводов с торцевыми обмотками. Накладки могут быть выполнены круглыми или секционными при размещении индукционных катушек с неподвижными сердечниками. В частном варианте исполнения профиль накладок выполнен соответствующим профилю торца магнитопровода с торцевыми обмотками. Вспомогательная ось одним концом жестко закреплена в корпусе, и возможность технологического проворота не допустима. Второй конец вспомогательной оси уперт в торец глухой втулки выходного вала посредством, например, шаровой опоры. Также, в частности, подают посредством внешнего управляющего блока на индукционные катушки мотор-редуктора ток с широтно-импульсной модуляцией в зависимости от режима работы мотор-редуктора.
Одним из вариантов исполнения по варианту 3 может быть то, что индукционные катушки спарены и размещены по обе стороны прецессирующего ротора. Иными словами мотор-редуктор снабжен индукционными катушками, расположенными парами вдоль окружности корпуса с зубчатым колесом с обеих сторон прецессирующего зубчатого колеса напротив друг друга и напротив соответствующих постоянных магнитов прецессирующего зубчатого колеса, причем одни индукционные катушки размещены по окружности корпуса напротив постоянных магнитов, расположенных на периферийной части прецессирующего зубчатого колеса, обращенного к зубчатому колесу корпуса, а парные им индукционные катушки размещены по окружности на пальцах корпуса с противоположной стороны прецессирующего зубчатого колеса и также жестко соединены с корпусом посредством пальцев с посадочными местами для индукционных катушек, пальцы размещены в пазах прецессирующего зубчатого колеса с зазором не менее величины прецессии в направлении прецессии вспомогательной оси, и накладки из высокоэнергетических постоянных магнитов размещены с обеих сторон прецессирующего зубчатого колеса напротив соответствующей индукционной катушки каждой пары числом, отличным от числа пар индукционных катушек, причем зазор «в» между соответствующей индукционной катушкой корпуса с зубчатым колесом и накладкой на плоской поверхности прецессирующего зубчатого зубчатого колеса с каждой стороны выполнен не более величины прецессии в продольном направлении вспомогательной оси и распределен таким образом, чтобы в крайних положениях прецессирующего зубчатого колеса накладки из магнитов поочередно прижимались то к одной индукционной катушке пары, то к другой с минимально допустимым зазором.
Представленное техническое решение поясняется чертежами, в которых показаны примеры, не исчерпывающие всех вариантов возможных схем подключения управляющих блоков и иных блоков и устройств, необходимых для функционирования мотор-ротора, а также не охватывают всех возможных схем размещения и типов магнитопроводов на корпусе. Чертежи демонстрируют наиболее общие принципы конструктивного решения вариантов 3.
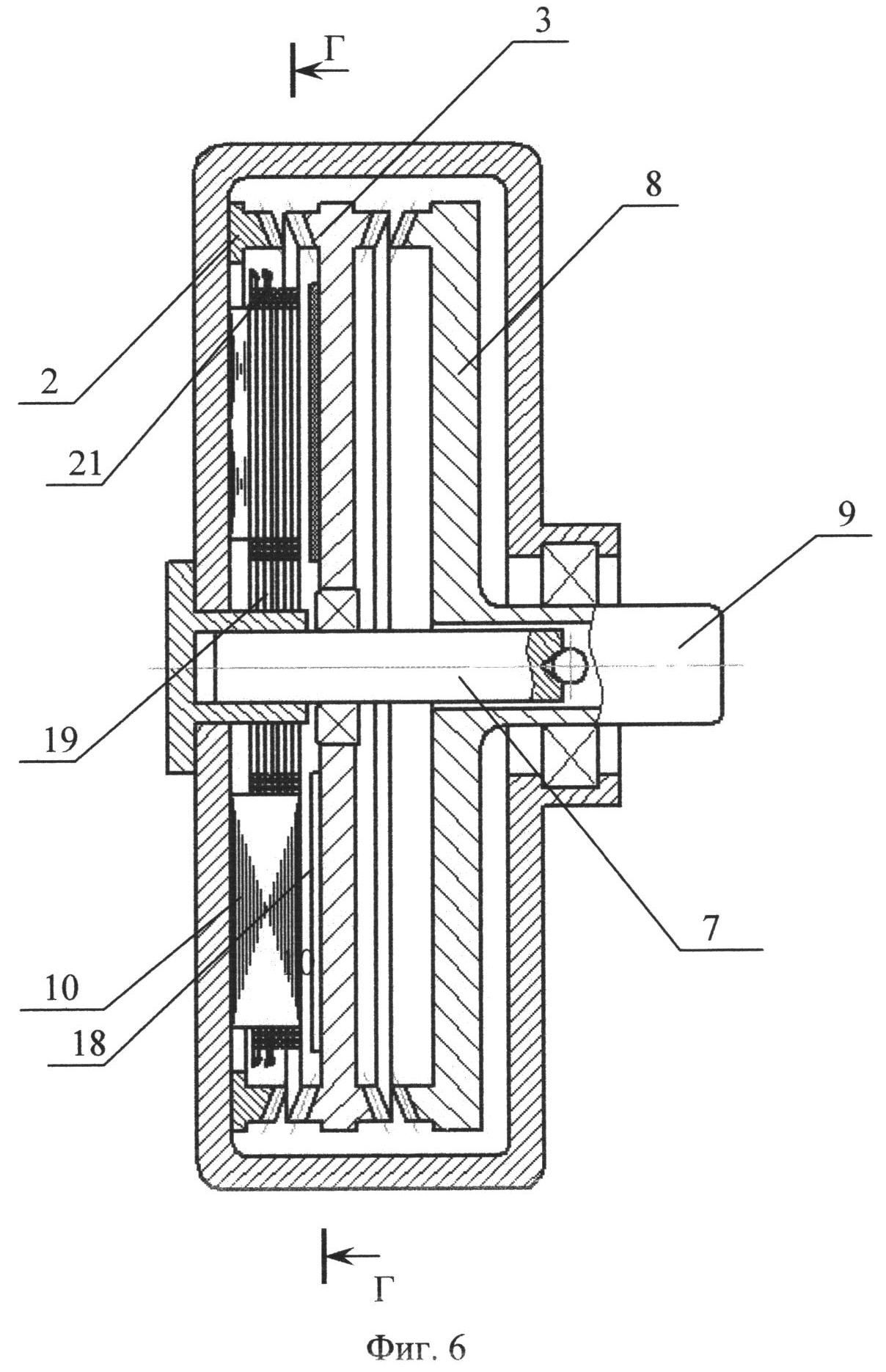
На Фиг.6 показано продольное сечение мотор-редуктора, снабженного индукционными катушками в виде магнитопровода с пазами, в которых размещены обмотки по Варианту 3.
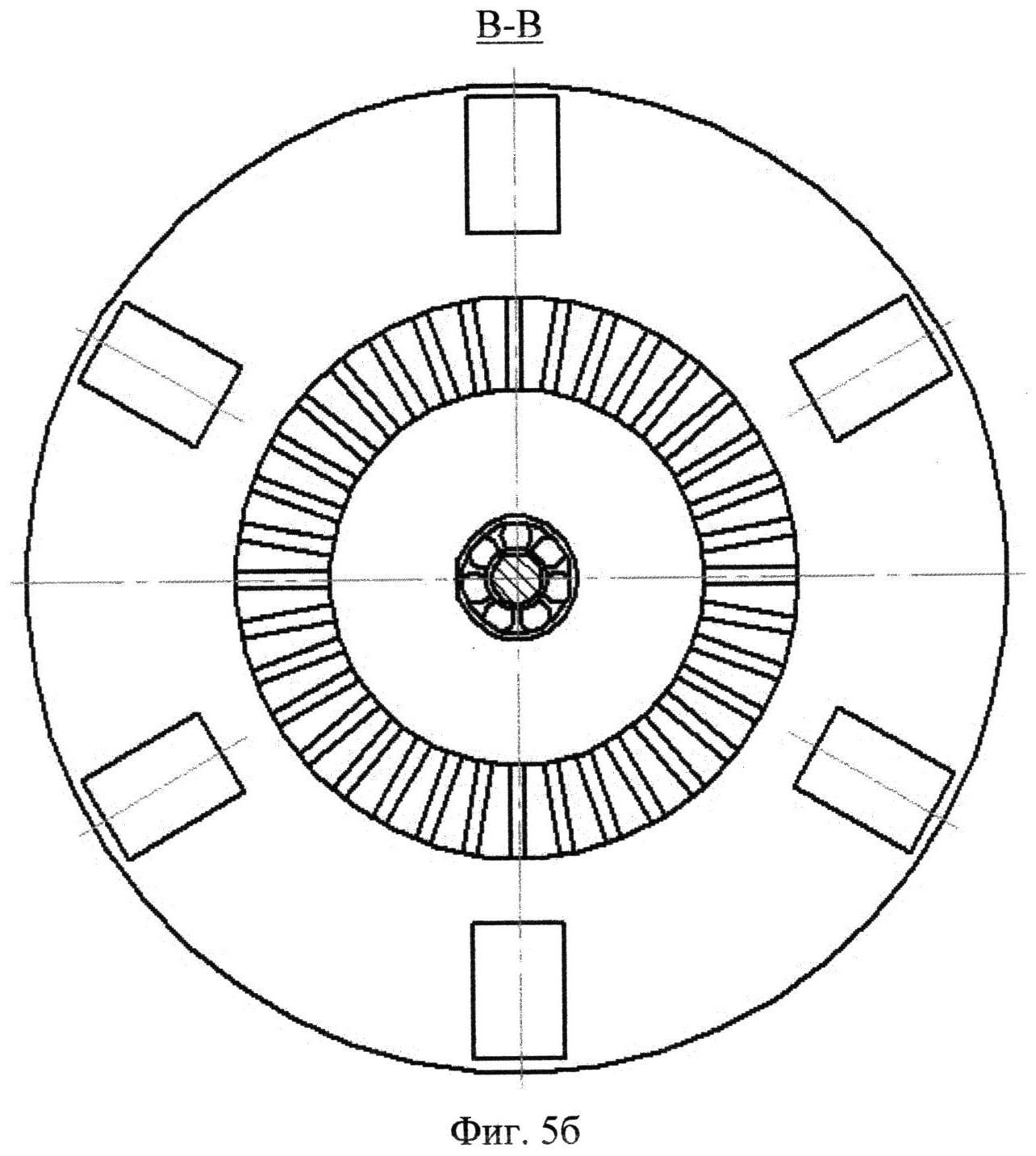
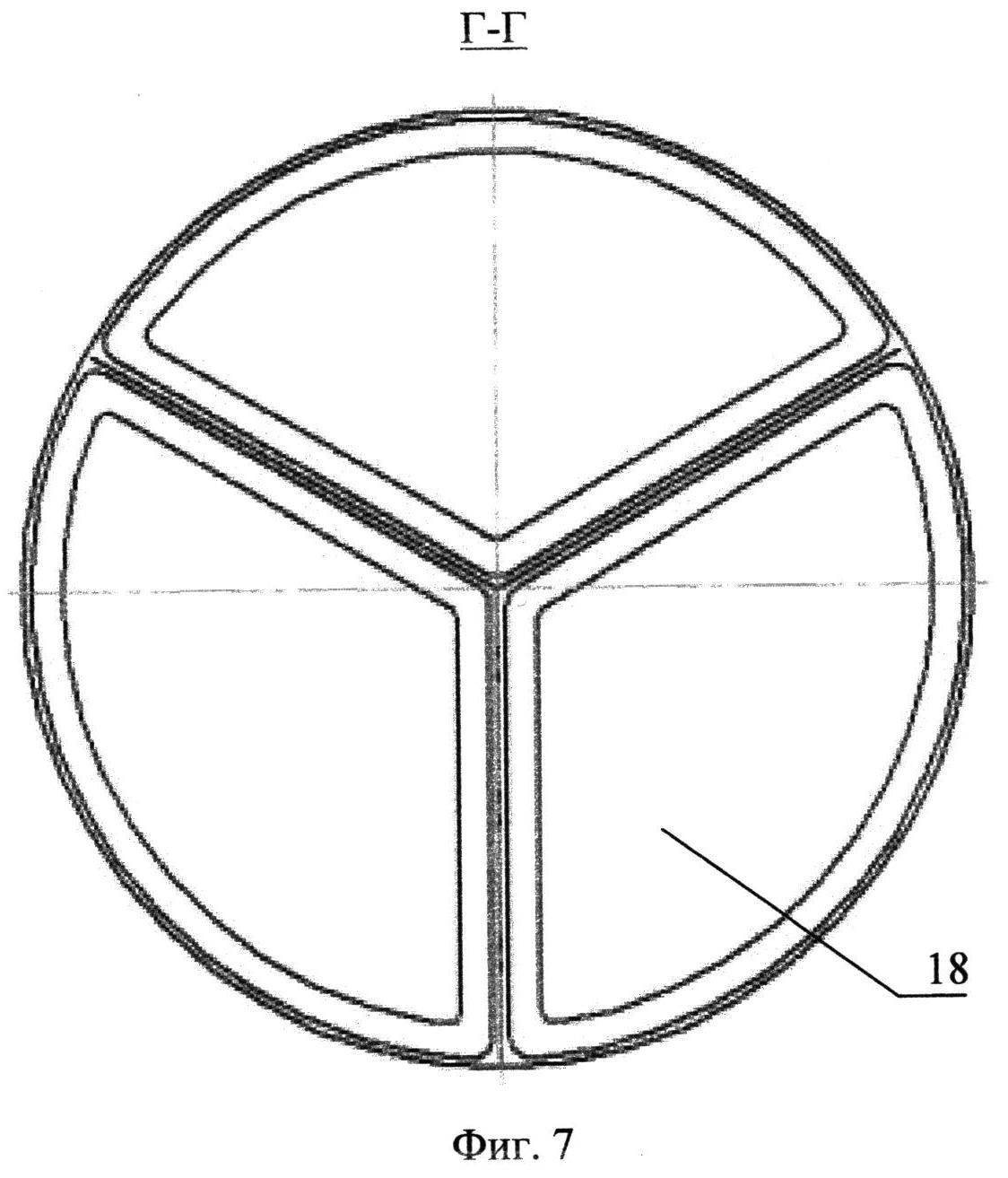
На Фиг.7 показано поперечное сечение, на котором показан кольцевой магнитопровод, где прорезаны 3 радиальных паза, в которых проходят витки обмоток.
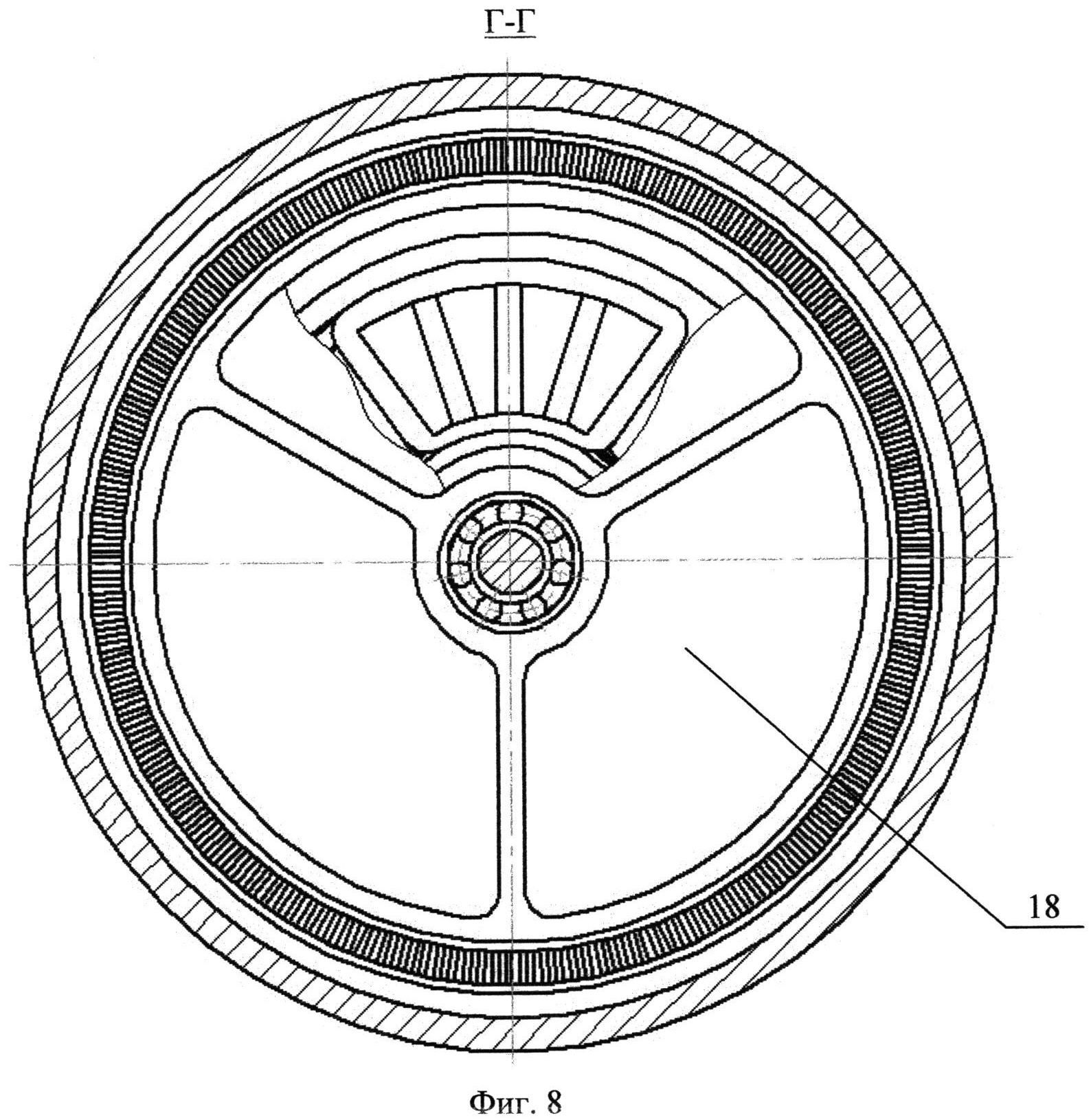
На Фиг.8 показано поперечное сечение, на котором показаны три «башмака» с пазами, внутри которых выполнены обмотки по числу пазов.
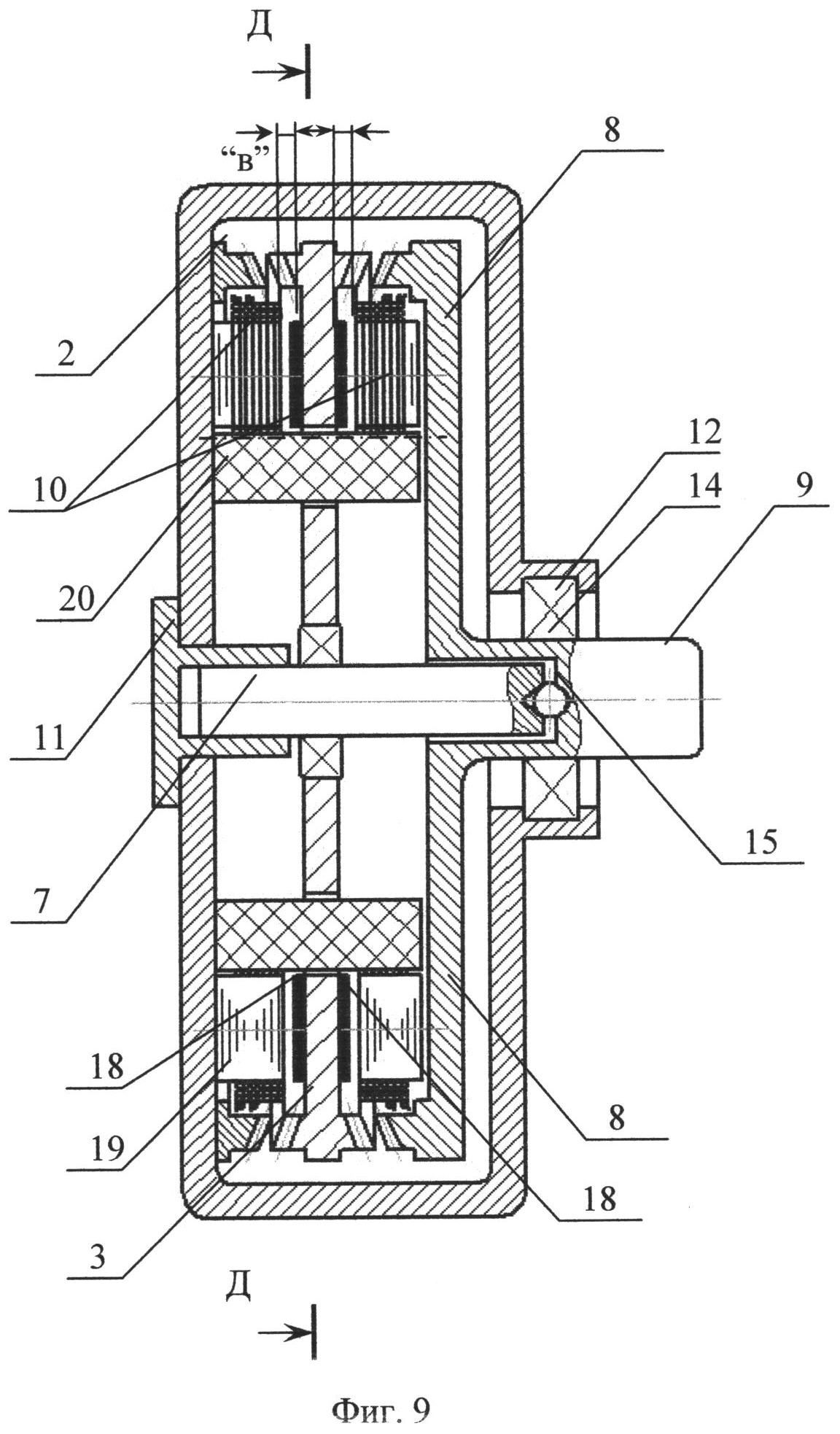
На Фиг.9 показано продольное сечение мотор-редуктора, снабженного индукционными катушками в виде магнитопровода с пазами, в которых размещены парные обмотки, индукционные катушки размещены на корпусе на посадочных местах пальцев, входящих с зазором в прецессирующее зубчатое колесо и размещенные со стороны другого его зубчатого венца по Варианту 3.
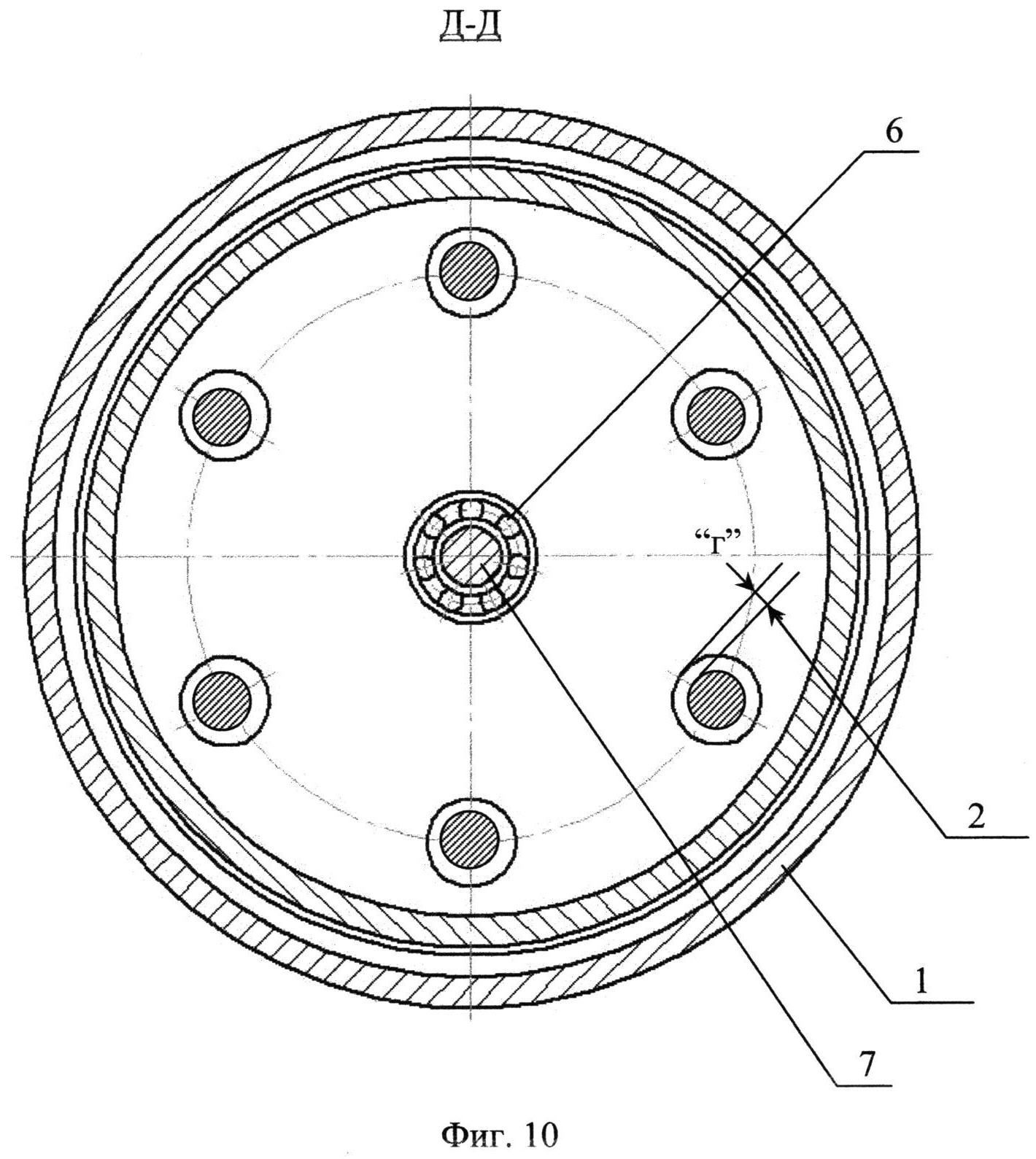
На Фиг.10 показано поперечное сечение, на котором показано прецессирующее зубчатое колесо с отверстиями, обеспечивающими прохождение пальцев с зазором «г».
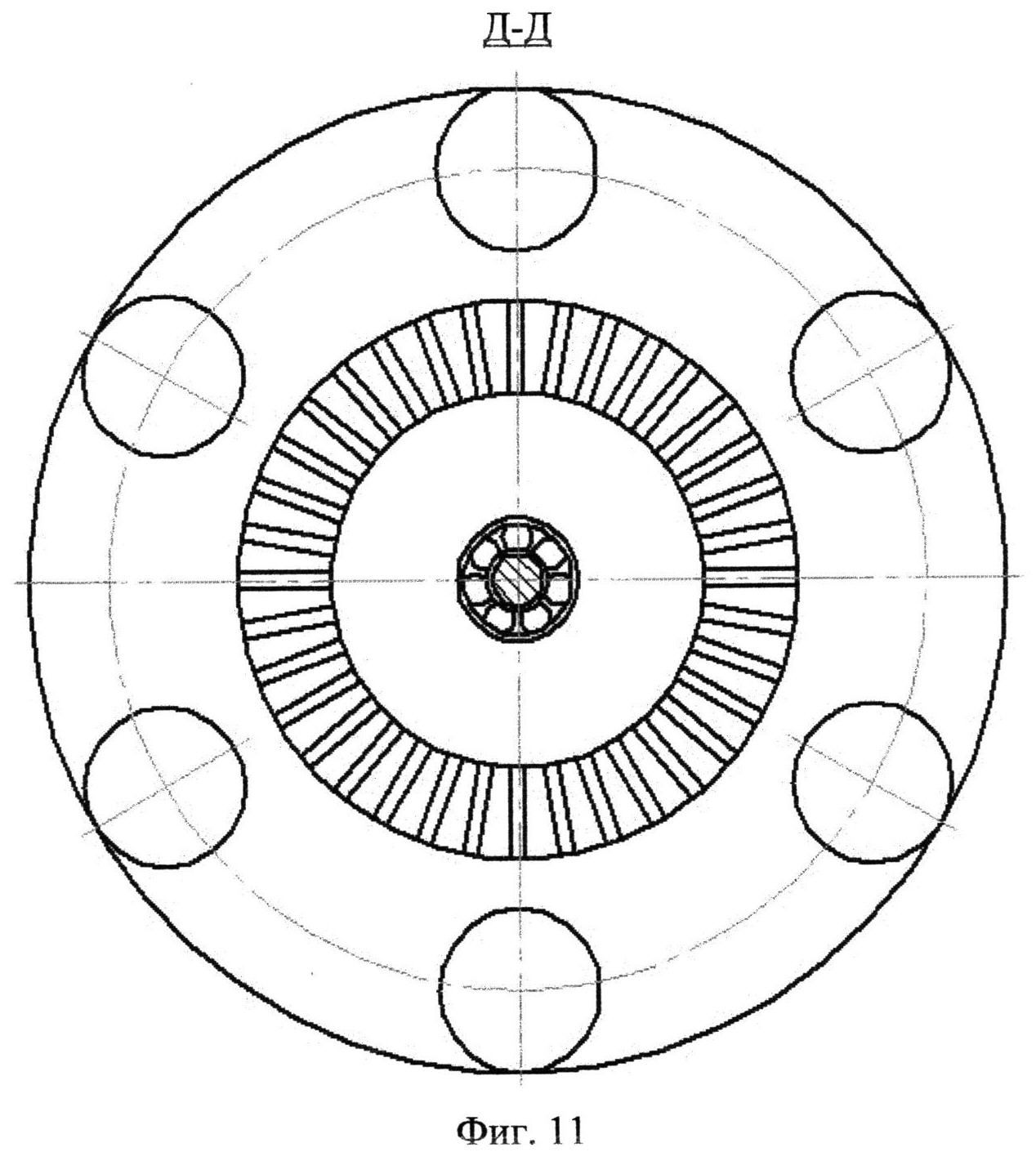
На Фиг.11 показано поперечное сечение, на котором показано прецессирующее зубчатое колесо с венцом и отверстия для пальцев корпуса.
Конструкция уктора по варианту 3 в основных его конструктивных элементах, таких как корпус (1), зубчатое колесо корпуса (2), крепление прецессирующего зубчатого колеса (3) по варианту «б» на вспомогательной оси (7), крепление вспомогательной оси (7) в корпусе (1) по варианту «б» и в выходном валу (9) по варианту «б», зубчатое колесо вала (8) и выходной вал (9), выполнены аналогично конструкции вариантов 1 и 2.
Так, отличие Варианта 3 от Варианта 2 в том, что если в Варианте 2 МДС, вызывающая прецессию зубчатого диска, порождается токами в сумме нескольких отдельных соленоидов, то в Варианте 3 она формируется в едином круглом (кольцевом) магнитопроводе (на Фиг.6 - позиция 10), на торце которого прорезаются радиальные пазы, в которых и укладываются обмотки. Таким образом, весь магнитопровод с обмотками, есть подобие статоров обычных бесколлекторных торцевых электродвигателей самых различных модификаций. На Фиг.7 и 8 отражены лишь следующие модификации:
Например, может быть статор «явнополюсного» трехфазного двигателя. У него в кольцевом магнитопроводе могут быть прорезаны лишь 3 радиальных паза, в которых и проходят витки обмоток. Иногда на получившиеся 3 сектора в кольце магнитопровода плотно крепят 3 листовых сектора из электротехнической стали (называемые - «Башмаками»). Но Башмаки могут накладываться и на кольцевой магнитопровод, в котором не 3, а значительно больше радиальных пазов, через которые и проходят витки обмоток (но уже и не трех катушек). Это показано в одном из «Башмаков» на Фиг.8.
На прецессирующем диске только накладки из высокоэнергетических постоянных магнитов.
Однако на прецессирующем зубчатом колесе предусмотрены накладки (18) из высокоэнергетичных постоянных магнитов, которые могут быть заменены на индукционные катушки. А на корпусе (1) размещены магнитопроводы (19) с размещенными в пазах обмотками (условно не показаны), образующие индукционные катушки (10) по типу статоров синхронных или асинхронных двигателей.
Прецессирующее зубчатое колесо (3) выполнено таким образом, чтобы была возможность размещения на нем по окружности в месте, где отсутствуют зубчатые венцы (4 и 5), постоянные магниты (18) либо только с одной стороны (фиг.7), либо с двух сторон (Фиг.8). Во втором исполнении - с парными индукционными катушками, в прецессирующем зубчатом колесе (3) предусмотрены отверстия, которые при его прецессии позволяют перемещаться пальцам (20) без соударения. Накладки из высокоэнергетических постоянных магнитов, расположенных напротив индукционных катушек корпуса с зубчатым колесом, равны числу индукционных катушек. Число и формы накладок из высокоэнергетических постоянных магнитов, расположенных напротив индукционных катушек корпуса с зубчатым колесом, выбираются так же, как и в обычных торцевых синхронных двигателях. Т.е. накладки могут быть выполнены круглыми или секционными по форме. Одноименные магнитные полюса постоянных магнитов расположены с одной стороны для левого и правого исполнения.
В случае использования магнитопровода с торцевыми обмотками, накладки имеют профиль, соответствующий профилю торцевой обмотки магнитопровода.
Индукционные катушки (10) корпуса (1) с зубчатым колесом (2) размещены по окружности в периферийной части прецессирующего зубчатого колеса (2) с зазором «в» между индукционной катушкой (10) и накладкой (18) на плоской поверхности промежуточного зубчатого колеса (3). Зазор «в» выполнен большим, чем величина прецессии прецессирующего зубчатого колеса (3) в продольном направлении вспомогательной оси (7). Индукционных катушек (10) размещено по окружности не менее трех в количестве, зависящем от требуемой величины выходного момента на выходном валу (9) мотор-редуктора. Индукционные катушки (10) выполнены, например, в виде торцевых индукционных катушек, которые выполнены как показано на Фиг.7. При этом обмотки выполнены вокруг каждой накладки снаружи. Либо в виде торцевых обмоток (магнитопроводов) (19) с торцевыми обмотками (21), которые выполнены в пазах накладки по количеству пазов, как показано на Фиг.8. При этом мотор-редуктор снабжен управляющим блоком (на чертеже не показан), обеспечивающим подключение индукционных катушек (10) к источнику тока с широтно-импульсной модуляцией в зависимости от режима работы статора мотор-редуктора.
Зазор «в» между индукционной катушкой (10) и накладкой (18) на плоской поверхности прецессирующего зубчатого колеса (3) с каждой стороны выполнен большим величины его прецессии в продольном направлении вспомогательной оси (3). При этом во втором - парном исполнении, зазор распределяется между торцами парных индукционных катушек (10) и накладками (18) таким образом, чтобы в крайних положениях промежуточного зубчатого колеса (3) накладки из магнитов поочередно прижимались то к одному торцу индукционной катушки (10), то к торцу другой (парной) индукционной катушки (10).
Парные индукционные катушки (10) корпуса (1) расположены парами вдоль окружности корпуса с зубчатым колесом (2) с обеих сторон прецессирующего зубчатого колеса (3) напротив друг друга и напротив соответствующих постоянных магнитов (18) прецессирующего зубчатого колеса (3). Одни размещены по окружности корпуса напротив постоянных магнитов (18), расположенных на периферийной части прецессирующего колеса, зубчатый венец (4) которого обращен к зубчатому колесу корпуса (2), а парные им индукционные катушки (10) размещены по окружности на пальцах (20) корпуса (1) с противоположной стороны прецессирующего зубчатого колеса (3) и также жестко соединены с корпусом (1) посредством пальцев (20) с посадочными местами для индукционных катушек (10). Пальцы (20) размещены в отверстиях (пазах) прецессирующего зубчатого колеса (3) с зазором «г», большим величины прецессии в направлении прецессии вспомогательной оси. На плоской поверхности прецессирующего зубчатого колеса (3) (там, где нет зубьев) с обеих сторон размещены накладки (20) из высокоэнергетических постоянных магнитов, расположенных напротив пар индукционных катушек (10) корпуса (1) с зубчатым колесом (2), равные числу индукционных катушек (10).
Система работает следующим образом.
При последовательной подаче на индукционные катушки максимального (расчетного) постоянного или переменного тока от источника тока с широтно-импульсной модуляцией в зависимости от режима работы прецессирующего ротора мотор-редуктора создается МДС, при этом продольный к оси O-O1 вектор магнитодвижущей силы обеспечивает прецессионное движение прецессирующего ротора (прецессирующего зубчатого колеса (3)). Отсутствие проворота вспомогательной оси (7) обеспечивает регулярную прецессию. Модуляция, а также режим подачи импульса тока на индукционные катушки обеспечивает управляющий блок (на чертежах не показан), к которому подсоединен мотор-редуктор. Поэтому в предложенной конструкции появляется возможность обеспечить множество конструктивных решений индукционных катушек с ответными частями (например, магнитами), расположенными на прецессирующем роторе в виде накладок. При этом предложенная конструкция позволяет обеспечить создание вращающегося магнитного поля, порождающее МДС методами, аналогичными работе статоров бесколлекторных торцевых двигателей как асинхронных, так и синхронных или вентильных. Преобразование прецессирующего движения зубчатого колеса (3) во вращательное движение выходного вала (9) осуществляется так же, как и в вариантах 16 и 26. Для варианта 3 может быть достигнута точность угла поворота выходного вала (9) с погрешностью, указанной в варианте 1. (Здесь - см. в Вар. 1 и 2) Крутящий момент на выходном валу в этих Вариантах (безусловно больший, чем в Вар. 1 и 2), -выбирается при совместном анализе, - требуемых скоростей и моментов вращения нагрузок, с учетом также - желаемых массогабаритных параметров мотор-редуктора.
Формируется МДС по законам Максвелла и/или Лоренца и соответствует изменению форм магнитных силовых линий в импульсном или непрерывном режиме аналогично ее изменению в шаговых или синхронных двигателях, и величин импульса тока и фазовых сдвигах тока относительно друг друга в каждой индукционной катушке согласно заданной точности угла поворота на выходном валу или заданной величине крутящего момента на выходном валу..
Иными словами, электротехнические функции мотор-редуктора - это создание магнитопроводов с теми или другими видами обмоток, задачей которых является создание вращающегося магнитного поля (как в обычных двигателях), которые взаимодействуют тем или иным образом с ротором. В представленной конструкции, в отличие от известных электрических двигателей, ротор является прецессирующим, без своего вращения вокруг оси O-O1.
Иными словами, существенное отличие предлагаемой конструкции мотор-редуктора состоит в ее механической части и состоит в способе воздействия на ротор.
Задачей статора является создание вращающегося магнитного поля, которое осуществляет силовое воздействие на прецессирующий ротор или иными словами ЭСД порождает крутящий момент вокруг продольной оси выходного вала под нагрузкой посредством воздействия на жесткий прецессирующий диск (ротор). Таким образом, вращающееся магнитное поле, порождающее эдс, выполняет функцию «водила» входного вала в традиционном редукторе.
Высокая точность передачи, а следовательно, и углов поворота выходного вала обеспечена за счет исключения люфтов типа боковых зазоров в зацеплениях зубчатых колес при сравнительно невысоких требованиях к точности их изготовления. А работоспособность мотор-редуктора с интегрированным прецессирующим жестким зубчатым колесом обеспечена за счет недопущения соприкосновения движущихся в поперечном и продольном направлениях деталей крепления индукционных катушек и прецессирующего ротора.
Таким образом, достигается заявленный технический результат - увеличение ресурса, повышение точности и упрощение конструкции.
При этом сохраняются положительные свойства торцевых редукторов и, в частности, компактность при высоких значениях требуемых передаточных чисел (в одной ступени редукции могут быть реализованы передаточные числа до 150) подобно свойствам известных волновых передач. Но в отличие от них не требуются дорогостоящие, имеющие ограниченный срок службы, упругие элементы конструкции.
Ряд конструктивных узлов ЭСД в предложенной конструкции мотор-редуктора могут создаваться по модульному принципу, что существенно снижает себестоимость создания параметрических рядов по величине крутящего момента на выходном валу и по точности угла поворота выходного вала. Это, в свою очередь, расширяет рынки сбыта соответствующих мотор-редукторов.