Результат интеллектуальной деятельности: СИСТЕМА ДЛЯ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ
Вид РИД
Изобретение
Система для освещения подводной обстановки относится к специальной технике и может быть использована для обнаружения и опознания подводных объектов, а также для сигнализации и оповещения о появлении на акваториях морских объектов хозяйственной деятельности (акватории портов, морские терминалы по добыче и транспортировке углеводородов, гидротехнические сооружения и т.д.) неизвестных малогабаритных подвижных аппаратов (МПА) или подводных пловцов (ПП), а также для обнаружения и сопровождения айсбергов.
Задачей изобретения является возможность оперативно определять место появления МПА или ПП, идентифицировать подводный объект и визуально отображать на мониторе диспетчерской станции морского объекта хозяйственной деятельности (МОХД) появление несанкционированного подводного объекта.
Известна система для освещения подводной обстановки, включая обнаружение и опознавание подводных пловцов (sales@reason.com[1]). Известная система представляет собой гидролокационную систему, построенную на основе многолучевого эхолота типа «Sea Bat 7112» фирмы «RESON Inc.» (USA) и приемопередатчика, который устанавливают стационарно на дне акватории или на патрульном судне. При постановке на дне акватории нескольких приемопередатчиков они соединяются с береговым вычислительным комплексом при помощи оптоволоконного кабеля.
Известная система включает многолучевой эхолот, антенна излучающего канала которого формирует 208 лучей. Один луч освещает 360-градусную зону сплошным покрытием. Кроме того, система может использоваться в режиме секторного освещения. Излучающий канал включает передатчик с антенной с излучаемой частотой 100 кГц, с частотой посылок до 15 кГц с максимальной длительностью импульса 3 мс.
Излучающий и приемный каналы соединены с блоком обработки акустических сигналов, предназначенным для формирования излучающих сигналов, и регистрации и обработки принятых сигналов соответственно. Блок обработки акустических сигналов соединен с процессором с программным обеспечением автоматического обнаружения и сопровождения, соединенным с устройством отображения информации. Известная система для освещения подводной обстановки обеспечивает дальность обнаружения и опознавания ПП на расстоянии до 500 м, а МПА на расстоянии до 1000 м. Работу системы в целом и обеспечение информационных связей обеспечивает процессор типа 7-P с интегрированным блоком управления и контроля.
К недостаткам известной системы для освещения подводной обстановки могут быть отнесены следующие недостатки.
Сравнительно невысокая дальность действия требует установки значительного количества донных приемопередатчиков на акватории МОХД, чтобы увеличить площадь и объем гидроакустического наблюдения, сводящего к минимуму возможность проникновения в зону расположения МОХД. На акваториях расположения МОХД рельеф дна может характеризоваться углублениями и поднятиями дна, основания которых гидроакустические сигналы многолучевого эхолота, установленного на дне, могут не достигать, и которые могут являться укрытием для МПА и ПП на период работы донных приемопередатчиков.
Известен также способ улучшения эффективности автоматической классификации целей в мобильных гидроакустических станциях обнаружения подводных диверсантов (Способ улучшения эффективности автоматической классификации целей в мобильных гидроакустических станциях обнаружения подводных диверсантов / Зайцев С.А., Ковчин И.В. // СПб. Оборонный заказ, №14, 2007, с.59-61 [2]), в котором для повышения достоверности классификации подводных диверсантов (ПД) предлагается использование тонкой структуры эхо-сигнала (ЭС) от обнаруженных целей в комплексе с их координатами и параметрами движения.
При этом, для того чтобы оценить параметры тонкой структуры сигнала, такие как длительность эхо-сигнала от цели, число локальных максимумов и т.д., необходимо очертить границы эхо-сигнала, т.е. именно ту часть, которая принадлежит отражению от цели.
В известном способе [2] использован алгоритм определения границ эхо-сигнала, основанный на измерении длительности на некотором уровне в окне фиксированной ширины (стробе). При этом границы «полезного» эхо-сигнала определяются в местах первого пересечения с порогом, если двигаться от краев окна внутрь. Этот алгоритм, как утверждается в ряде исследований, достаточно хорошо работает для задач классификации надводных кораблей и подводных лодок, т.е. достаточно протяженных целей. Но для обнаружения малоразмерных целей он имеет следующие недостатки. Оба из них обусловлены наличием ограничивающего параметра «максимальная длительность эхо-сигнала». И в зависимости от протяженности эхо-сигнала этот факт ограничивает либо очень протяженные цели (в случае обнаружения пловцов, как правило, ложные), либо объединяет отражения от разных целей. При этом «полезный» эхо-сигнал» является не совсем адекватным.
Поэтому судить о принадлежности локальных максимумов эхо-сигналу от цели можно по дистанции между ними. В связи с этим предложен алгоритм, действующий именно по этому принципу и основанный на объединении локальных максимумов. Суть его следующая. Сначала определяются границы главного максимума на уровне порога К. Далее вычисляется дистанция до соседнего, в данном случае - правого, максимума di на уровне того же порога. Если она менее некоторой величины dimax, главный и правый максимум объединяются в один «полезный» эхо-сигнал от цели. Аналогично происходит объединение максимумов дальше вправо до тех пор, пока дистанция между максимумами на уровне порога будет меньше dimax. Аналогичная процедура производится слева от главного максимума. При этом нет ограничения на протяженность цели, а разрешение между отдельными группами максимумов можно регулировать параметром dimax, т.е. он имеет вполне конкретный физический смысл (в отличие от параметра максимальной протяженности в стробовом алгоритме).
Далее требуется составить априорный перечень информативных классификационных признаков, относительно которых может быть получена априорная информация, необходимая для описания классов на языке этих признаков; далее путем оценки эффективности признаков требуется составить рабочий перечень признаков, распределение которых будет составлять базу данных обучаемой системы классификации.
Многообразие параметров тонкой структуры достаточно широкое. Однако не все из них являются подходящими для достижения цели данной работы. Например, нет особого смысла выделять параметры, связанные с положением максимумов, потому что неизвестно точное время прихода сигнала и его длительность. Из-за этого отсчеты разных реализаций выделенных ЭС оказываются не соответствующими друг другу во временной области. Для использования параметров такого типа необходимо выполнить процедуру, которая в радиолокации называется выравнивание. В иностранных исследованиях часто используют не параметры тонкой структуры, а передаточные функции в частотной области.
В известном способе [2] выделяют следующие классификационные признаки (КП), относительно которых может быть получена информация: длина ЭС и число локальных максимумов, измеренные на двух уровнях; амплитуда ЭС и признак, характеризующий спектр, в качестве которого будем использовать эвклидову дистанцию между векторами спектра ЭС и некоторого шаблонного. Из-за геометрической расходимости, признак «амплитуда» нельзя использовать напрямую. Зная дистанцию до объекта, правильнее получать производную величину с компенсацией геометрической расходимости, которая будет иметь смысл силы цели.
Используя экспериментальные данные, по результатам расчетов первое место по значению эффективности занимает такой рабочий словарь, который содержит два признака - число значительных максимумов в полезном сигнале и сила цели. Они и будут составлять рабочий перечень признаков. Этот перечень КП содержит параметры, характеризующие различные аспекты в эхо-сигнале пловца - протяженность и величина отраженного сигнала.
Условные совместные плотности вероятности рабочих признаков для обоих классов различны. Класс ПД имеет преимущественно один значительный максимум и размазанную силу цели. В то время как для класса «прочие цели» (ПЦ) обратная ситуация: размазанность по числу значительных максимумов и локализация в области небольшой силы цели. Все это говорит об отличительной особенности пловца - его малоразмерность и значительный уровень отраженного сигнала. Для указанных распределений можно вычислить такие характеристики, как вероятность правильного обнаружения, ложной тревоги и т.д., которые определяют эффективность разделения классов ПД и ПЦ. Вот результаты этих расчетов. Для полученных распределений характерна довольно высокая вероятность правильного обнаружения цели класса ПД, но также высокая вероятность ложной тревоги, т.е. двумерное распределение параметров для ПЦ значительно заступает в зону правильного обнаружения ПД. При этом рабочий перечень КП включает число значительных максимумов и силу цели.
Выявленные рабочие признаки зависимы.
Далее задача состоит в непосредственной разработке блока классификации, который используется совместно с блоком классификации по параметрам движения. Блок в качестве входных данных имеет эхо-сигналы от цели с выхода согласованного фильтра. Алгоритм вынесения решения о классе цели весьма стандартный и реализуется в три этапа: вычисляется апостериорная вероятность принадлежности цели классу ПД и принимается решение о классе цели.
С одной стороны, задача определения неизвестного времени начала прихода сигнала и его длительности немного проще общепринятой, т.к. установлено, что известный момент обнаружения находится внутри границ эхо-сигнала. С другой стороны, неизвестна форма принимаемого сигнала. Когда отношение сигнал/шум (25-30 дБ) достаточно, интуитивно понятно, как должны быть расположены границы эхо-сигнала. В общем случае это не так очевидно. Причем задача определения границ является основной и, по сути, фундаментом для всех последующих задач, возникающих при построении системы распознавания с обучением. От способа ее решения будет зависеть, в частности, являются ли разделяемыми те или иные классы, т.е. предложенные классификационные признаки являются неапробированными.
Кроме того, если принять, что шумовая помеха носителя гидроакустической станции значительно превышает реверберационную (а такая ситуация реальна в очень многих случаях: при больших шумах, при работе на низких частотах, при коротких длительностях импульсов и т.д.), то акустическое давление помех будет определяться только шумовой помехой.
Обнаружение подводных диверсантов гидроакустическими методами представляет собой сложную научно-техническую задачу, главным образом ввиду трудности классификации эхо-сигналов от ПД, принимаемых на фоне множества ЭС от различных посторонних неподвижных и подвижных объектов, а также от неоднородностей подводной среды. Ситуация еще более усложняется для судовых ГАС, которые имеют две существенные особенности, влияющие на эффективность классификации целей:
- снос носителя, вызывающий относительное движение фактически неподвижных целей;
- низкую точность пеленгования, обусловленную недокомпенсацией свободного вращения цилиндрической антенны, следствием чего также является квазидвижение неподвижных объектов.
Применительно к ГАС все возможные классификационные признаки (КП) ПД и альтернативных классов объектов могут быть разделены на две группы:
- координаты (пеленг, дистанция, глубина) и параметры движения (скорость, курс, величина изменения расстояния и пеленга) целей;
- параметры, так называемой, тонкой структуры ЭС, описывающие его форму (длительность, количество максимумов, их взаимное расположение и др.).
И если КП, относящиеся к 1-й группе, в какой-то степени изучены, т.е. имеются их статистические модели, то информации о КП, относящихся ко 2-й группе, очень мало, и поэтому промышленная реализация известного способа [2] для обеспечения высокой эффективности автоматической классификации ПД, основанная на тонкой структуре ЭС, в настоящее время практически невозможна.
Задачей настоящего технического решения является повышение надежности и достоверности обнаружения и опознания МПА и ПП за счет увеличения дальности работы системы для освещения подводной обстановки.
Поставленная задача решается за счет того, что система для освещения подводной обстановки, состоящая из группы многолучевых эхолотов, гидроакустические приемопередатчики которых посредством приемопередающей антенны формируют n-лучей с возможностью секторного обзора на акватории расположения объекта морской хозяйственной деятельности, при этом приемопередатчики соединены с блоком обработки акустических сигналов, установленным на диспетчерском пункте морского объекта хозяйственной деятельности и который соединен с процессором с программным обеспечением автоматического обнаружения и сопровождения, который также соединен с устройством отображения информации, при этом каждый приемопередатчик соединен с блоком обработки акустических сигналов, установленным на диспетчерской станции морского объекта хозяйственной деятельности, излучающий и приемный каналы соединены с блоком обработки акустических сигналов, предназначенным для формирования излучающих сигналов, и регистрации и обработки принятых сигналов соответственно, блок обработки акустических сигналов соединен с процессором с программным обеспечением автоматического обнаружения и сопровождения, соединенным с устройством отображения информации, в которой каждый многолучевой эхолот содержит параметрический профилограф, причем антенны накачки параметрического профилографа размещают на дрейфующих или заякоренных буях на разных горизонтах по глубине акватории на расстояниях не более 8000 метров друг от друга.
Новые отличительные признаки, заключающиеся в том, что в системе для освещения подводной обстановки - каждый многолучевой эхолот содержит параметрический профилограф, причем антенны накачки параметрического профилографа размещают на дрейфующих или заякоренных буях на разных горизонтах по глубине акватории на расстояниях не более 8000 метров друг от друга, что позволяет существенно расширить подводную зону освещения подводной обстановки, а также увеличить дальность обнаружения МПА и ПП.
Сущность предлагаемого технического решения поясняется чертежами (фиг. 1-2).
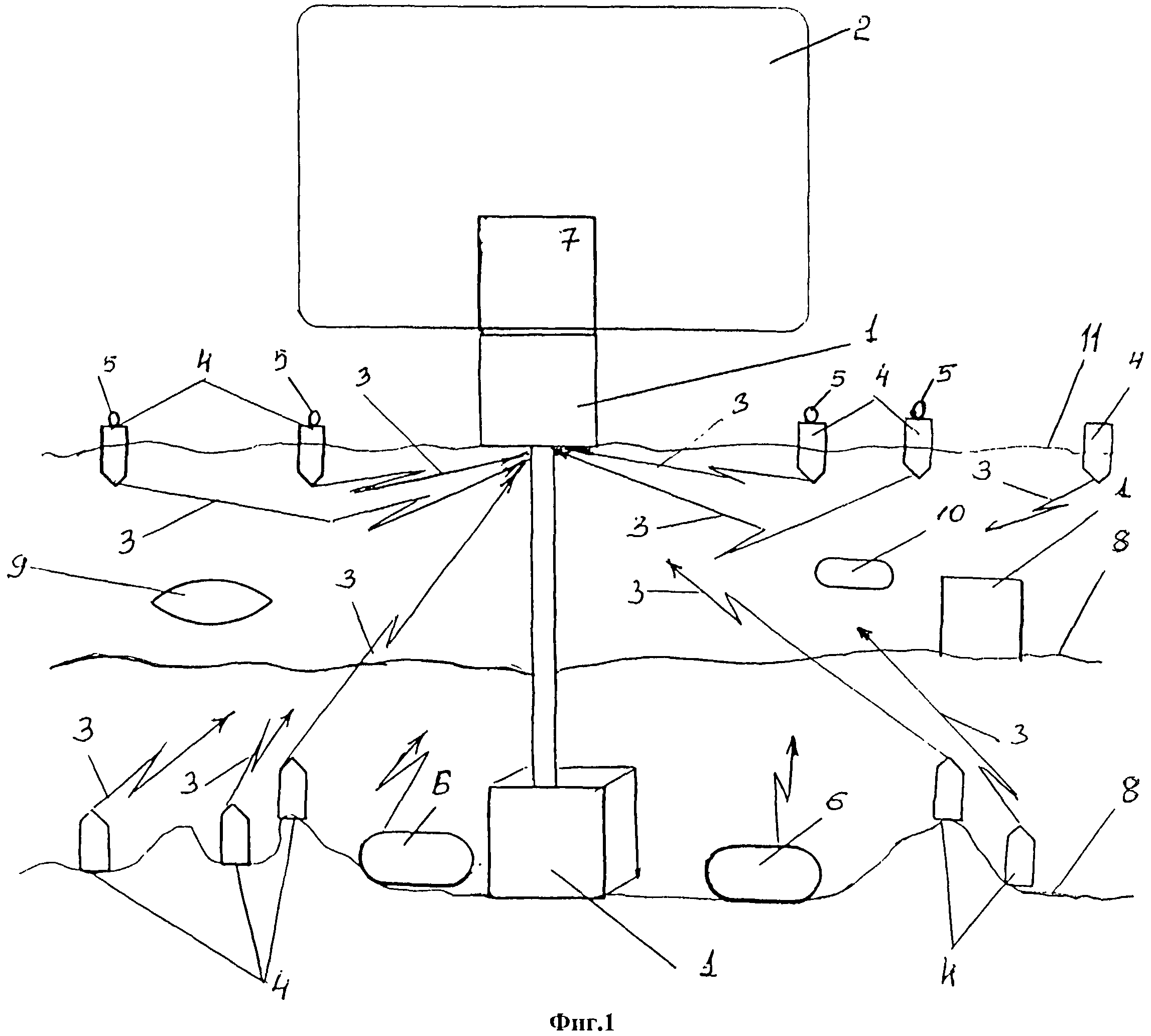
Фиг. 1. Блок-схема системы освещения подводной обстановки. Система освещения подводной обстановки МОХД включает диспетчерский пункт 2 МОХД 1 с блоком 7 обработки акустических сигналов, соединенным гидроакустическим каналом связи 3 с многолучевым эхолотом 6, антенну 5 спутникового радиоканала связи. На фиг. 1 позициями также обозначены морское дно 8, МПА 9, ПП 10, водная поверхность 11, дрейфующие или заякоренные буи 4.
Фиг. 2. Структурная схема системы для освещения подводной обстановки. Структурная схема системы для освещения подводной обстановки включает антенну 12 многолучевого эхолота, антенну 13 накачки параметрического профилографа, которая является одновременно и антенной высокочастотного профилографа, и низкочастотную приемную антенну 14 параметрического профилографа, генератор 15 зондирующих импульсов, приемник 16 эхо-сигналов, блок 7 обработки акустических сигналов, пульт 17 управления и индикации с интерфейсным блоком и сетевым концентратором типа «EZERNET».
Многолучевой эхолот 6 представляет собой многолучевой эхолот со сложным линейно-частотным модулированным сигналом. Развертка мощности принятых сигналов осуществляется по дальности и углу. Из 32 приемных каналов формируют 256 лучей, что позволяет получить квазинепрерывный профиль зондируемых объемов гидросферы. Приемоизлучающая антенна 12 многолучевого эхолота 6 диапазона частот 30 кГц состоит из 32 элементов.
Забортная часть включает в себя антенну 12 многолучевого эхолота, антенну 13 накачки параметрического профилографа, которая является одновременно и антенной высокочастотного профилографа, и низкочастотную приемную антенну 14 параметрического профилографа.
Генератор 15 зондирующих импульсов содержит излучающие тракты эхолота, генераторы накачки параметрического профилографа.
Приемник 16 эхо-сигналов содержит приемные тракты эхолота, высокочастотного профилографа и низкочастотного параметрического профилографа, четыре сигнальных процессора, предназначенных для преобразования аналоговых сигналов в цифровую форму и первичной обработки этих сигналов, интерфейс связи между различными частями комплекса, схему управления, формирователь сигналов, схему временной автоматической регулировки усиления и преобразователя сигналов датчиков. Высокочастотный профилограф предназначен для точного профилирования рельефа дна. Низкочастотный профилограф предназначен для профилирования придонных осадков. Пульт 17 управления и индикации содержит процессор с программным обеспечением автоматического обнаружения и сопровождения целей, который построен на базе процессора типа 80486CPU и цифрового преобразователя сигналов типа MC 56001, а также цветной жидкокристаллический индикатор с возможностью отображения различных режимов и их комбинаций, а также электронной карты в соответствии с требованиями IMO Resolution A. 817/19. Устройство отображения информации представляет собой видеоплоттер.
Параметрический профилограф работает на трех фиксированных частотах 7, 10 и 14 кГц, являющихся разностными частотами параметрического излучающего тракта. Излучение зондирующих сигналов длительностью 0,5-1 мс обеспечивается нелинейным взаимодействием сигналов накачки с частотой 154 кГц и сигналов с частотами 147, 143,5 и 140 кГц соответственно. Ширина характеристики направленности излучающей параметрической антенны 13 постоянна во всем диапазоне рабочих частот и составляет 2×4 градуса на уровне - 3дБ. Ширина характеристики на уровне - 3дБ широкополосной приемной антенны в зависимости от рабочей частоты изменяется в пределах 10×26 градусов (на частоте 14 кГц) до 20×52 градуса (на частоте 7 кГц). Индикация эхо-сигналов обеспечивается в цветовой гамме.
Блок 7 обработки акустических сигналов предназначен для классификации подводных целей по их частотным характеристикам, а также для оценки размеров целей по интервалу частот между минимальными и максимальными значениями силы цели на частотных зависимостях на фоне рельефа дна по известным методикам (см., например: Гидроакустические параметрические системы. В.А.Воронин, С.П.Тарасов, В.И.Тимошенко. Ростов-на-Дону: Ростиздат, 2004, с.352-353; Клей К., Медвин Г. Акустическая океанография. Основы и применения. - М.: Мир, 1980. - 580 с.).
Система для освещения подводной обстановки работает следующим образом.
На морском дне акватории МОХД 1 размещают n многолучевых эхолотов 6, гидроакустические передатчики которых посредством приемопередающей антенны 12 формируют n-лучей, посредством передающих и принимающих трактов, с возможностью секторного обзора на акватории расположения объекта морской хозяйственной деятельности.
На морской поверхности 11, а при необходимости и на разных горизонтах по глубине акватории, размещают дрейфующие или заякоренные буи 4, оснащенные антенной 13 накачки параметрического профилографа, которая является одновременно и антенной высокочастотного профилографа, и низкочастотную приемную антенну 14 параметрического профилографа, генератор 15 зондирующих импульсов, приемник 16 эхо-сигналов.
При этом буи 4 размещают на горизонтах акватории по периметру акватории на расстояниях не более 8000 м друг от друга. Каждый из буев должен быть размещен на расстоянии не более 8000 м от диспетчерского пункта 2 морского объекта хозяйственной деятельности 1 и соединен с диспетчерским пунктом 2 гидроакустическим каналом связи 3. Размещение буев 4 на расстояниях не более 8000 м обусловлено дальностью действия гидроакустического канала связи.
Буи 4 снабжены модемами спутникового радиоканала 5 и гидроакустического канала связи 3, посредством которого формируется пакет сообщения на диспетчерский пункт 2. В способах передачи кодовых сообщений при передаче информации по спутниковому радиоканалу и гидроакустическому каналу связи используются методы со скачкообразной перестройкой частоты (см., например: Прокис Джон. Цифровая связь. М.: Радио связь, 2000 г. - с.628-629), т.е. методы многоуровневой частотной манипуляции. Приемные устройства состоят из многоканальных приемников, настроенных на различные частоты. На пульте управления 17, посредством процессора с программным обеспечением автоматического обнаружения и сопровождения целей после обработки принятых пакетов сообщений формирует сигналы для отображения их на индикаторе, на котором отображаются координаты и путь движения МПА 9 или ПП 10. При неблагоприятном развитии ситуации с продвижением МПА 9 или ПП 10 в сторону МОХД 1 принимают решение по локализации дальнейшего продвижения МПА 9 или ПП 10.
В отличие от известной системы для освещения подводной обстановки (прототип) предлагаемая система для освещения подводной обстановки позволяет заблаговременно обнаружить появление несанкционированного МПА или ПП в зоне действия МОХД.
Источники информации
1. Официальный сайт «sales@reason.com» фирмы «RESON Inc.» (USA).
2. Способ улучшения эффективности автоматической классификации целей в мобильных гидроакустических станциях обнаружения подводных диверсантов / Зайцев С.А., Ковчин И.В. // СПб. Оборонный заказ. №14, 2007, с.59-61.
Система для освещения подводной обстановки, состоящая из группы многолучевых эхолотов, гидроакустические приемопередатчики которых посредством приемопередающей антенны формируют n-лучей с возможностью секторного обзора на акватории расположения объекта морской хозяйственной деятельности, при этом приемопередатчики соединены с блоком обработки акустических сигналов, установленным на диспетчерском пункте морского объекта хозяйственной деятельности, который соединен с процессором с программным обеспечением автоматического обнаружения и сопровождения, который соединен с устройством отображения информации, при этом каждый приемопередатчик соединен с блоком обработки акустических сигналов, установленным на диспетчерской станции морского объекта хозяйственной деятельности, излучающий и приемный каналы соединены с блоком обработки акустических сигналов, предназначенным для формирования излучающих сигналов, регистрации и обработки принятых сигналов соответственно, блок обработки акустических сигналов соединен с процессором с программным обеспечением автоматического обнаружения и сопровождения, соединенным с устройством отображения информации, отличающаяся тем, что каждый многолучевой эхолот содержит параметрический профилограф, причем антенны накачки параметрического профилографа размещают на дрейфующих или заякоренных буях на разных горизонтах по глубине акватории на расстояниях не более 8000 метров друг от друга.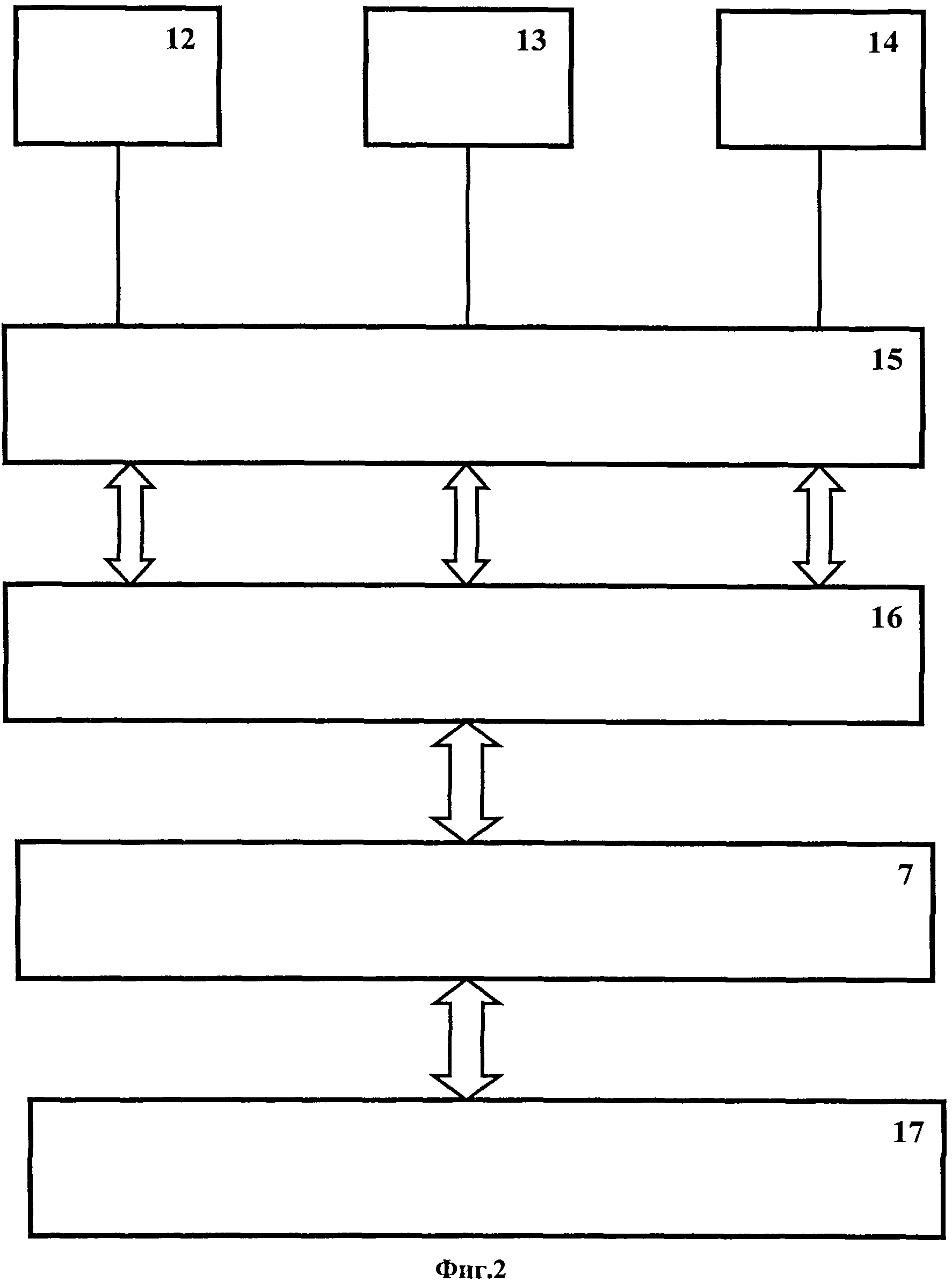
Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения ускорения силы тяжести на движущемся объекте и устройство для определения ускорения силы тяжести на движущемся объекте
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения
Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения ускорения силы тяжести на движущемся объекте и устройство для определения ускорения силы тяжести на движущемся объекте
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения

