Результат интеллектуальной деятельности: ОПТИЧЕСКИЙ ДАЛЬНОМЕР
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к измерительному устройству для измерения расстояния между ним и целевым объектом с помощью измерительного оптического излучения.
Уровень техники
Известны оптические дальномеры - измерительные приборы, направляющие модулированный во времени световой луч в направлении целевого объекта, расстояние от измерительного прибора до которого требуется измерить. Свет, возвращающийся от освещенного целевого объекта в результате отражения или обратного рассеяния, по меньшей мере частично регистрируется измерительным прибором и используется для определения измеряемого расстояния. При этом типичный диапазон измерения расстояний составляет от нескольких сантиметров до нескольких сотен метров.
Для того чтобы с помощью светового луча можно было измерить расстояние до целевого объекта, световой луч модулируют во времени, например по его интенсивности. Например, можно излучать свет импульсами и измерять время прохождения светового импульса от момента его посылки до момента его регистрации и на основании измеренного времени вычислять расстояние до целевого объекта. Однако для получения достаточно точных результатов измерений нужно излучать очень короткие световые импульсы и использовать очень быструю регистрирующую электронику. В качестве альтернативы световой луч можно модулировать во времени в отношении его интенсивности периодически, а для определения времени прохождения излучения и соответственно расстояния до целевого объекта можно использовать фазовый сдвиг между посланным и зарегистрированным световым сигналом. Подобный принцип измерения расстояний с помощью лазера общеизвестен как времяпролетное измерение дальности, или измерение дальности по времени прохождения света (Time of Flight Ranging), например, с непрерывной модуляцией интенсивности лазерного луча.
Также известны так называемые трехмерные (3D-) фото- и видеокамеры, в которых в дополнение к оптическому изображению снимаемого объекта также необходимо регистрировать соответствующее расстояние от определенного участка на поверхности снимаемого объекта до камеры. Для этого камера имеет изображающую оптическую систему, резко проецирующую изображение объекта на поверхность расположенного за ней детектора. При этом детектор имеет множество пикселей, расположенных по типу матрицы. Каждый из пикселей может определять относящуюся к изображению информацию, например цвет или интенсивность света, отраженного от определенного участка поверхности целевого объекта. Дополнительно может определяться информация о расстоянии между камерой и соответствующим участком поверхности целевого объекта. С этой целью целевой объект можно освещать модулированным во времени лазерным излучением и использовать излучение, отраженное от целевого объекта и направленное на детектор с помощью изображающей оптической системы, путем определения времени прохождения этого излучения для получения с пространственным разрешением информации о расстояниях до соответствующих участков поверхности целевого объекта.
Правда, такая трехмерная камера, помимо детектора с множеством пикселей и пространственным разрешением, также нуждается в изображающей оптической системе, обеспечивающей отображение каждого участка поверхности целевого объекта точно на "свой" пиксель, причем получаемый от этого пикселя сигнал регистрации излучения затем может использоваться для определения расстояния до соответствующего участка поверхности. Это требует применения сравнительно сложной фокусирующей оптической системы, а также возможности анализировать сигналы регистрации излучения, получаемые от каждого из пикселей, по отдельности.
В отличие от камер простые дальномеры используются лишь для определения расстояния между измерительным прибором и целевым объектом, т.е. визируемой лазерным лучом точкой на целевом объекте. При этом для определения расстояний пространственное разрешение можно не использовать. Как правило, достаточно определять осредненное расстояние. Такие дальномеры часто применяются в портативных устройствах, используемых, например, для определения в помещении расстояния от определенного места до окружающих целевых объектов, например стен или предметов обстановки. При этом портативный дальномер предпочтительно должен иметь как можно более простую, надежную и недорогую конструкцию и должен быть простым в управлении.
Из публикации DE 102006013290 А1 известно устройство для оптического измерения расстояний, в котором детектор приемника имеет множество отдельных друг от друга светочувствительных поверхностей, активизируемых отдельно друг от друга. При этом каждая из светочувствительных поверхностей в качестве светочувствительного элемента имеет фотодиод, например точечный диод или лавинный фотодиод, либо ПЗС-чип. Эти светочувствительные элементы формируют аналоговый сигнал регистрации излучения, соответствующий интенсивности принятого света. Светочувствительные поверхности могут активизироваться избирательно и таким образом объединяться в общую регистрирующую поверхность, которую можно наилучшим образом согласовать с освещаемым источником света участком регистрирующей поверхности детектора, чтобы таким образом повысить отношение "сигнал-шум".
Раскрытие изобретения
Соответственно существует потребность в измерительном устройстве для оптического измерения расстояний, которое допускало бы упрощенную, в частности по сравнению с описанными выше обычными дальномерами, конструкцию применяемых в нем компонентов электроники, в частности компонентов обработки сигналов/данных для анализа сигналов регистрации излучения.
Кроме того, существует потребность в дальномере, который обладал бы по меньшей мере одним из следующих преимуществ:
- расширение допусков на юстировку приемной оптической системы дальномера относительно детектора;
- уменьшение сложности и снижение требований к приемной оптической системе;
- увеличение динамического диапазона, особенно при измерении малых расстояний;
- оптимизация отношения "сигнал-шум", особенно при измерении больших расстояний; и/или
- уменьшение необходимой для анализа сигналов площади кристалла интегральной схемы.
Предлагаемое в изобретении измерительное устройство для оптического измерения расстояний содержит излучатель для испускания измерительного оптического излучения в направлении целевого объекта, приемник, имеющий регистрирующую поверхность для регистрации измерительного оптического излучения, возвращающегося от целевого объекта, и блок обработки данных, содержащий множество устройств определения расстояния. При этом регистрирующая поверхность приемника содержит множество пикселей, каждый из которых имеет по меньшей мере один светочувствительный элемент. Каждый из множества пикселей соединен с блоком обработки данных напрямую или опосредованно через дополнительные промежуточные компоненты. Блок обработки данных выполнен с возможностью передачи от нескольких пикселей по меньшей мере в одно из устройств определения расстояния сигналов регистрации излучения, на основании которых соответствующее устройство определения расстояния получает данные расстояния, коррелирующие с расстоянием между измерительным устройством и целевым объектом. Блок обработки данных также выполнен с возможностью определения расстояния между измерительным устройством и целевым объектом на основе анализа данных расстояния, полученных множеством устройств определения расстояния.
Излучателем может быть источник света, выполненный, например, в виде светодиода, лазера или лазерного диода и испускающий свет с временной модуляцией в направлении целевого объекта. При этом временная модуляция может выполняться непрерывно и/или периодически, например синусоидально. Также излучатель может посылать, в частности непериодически, последовательности импульсов, например в виде так называемых шумоподобных последовательностей импульсов.
Каждый из пикселей может быть соединен с блоком обработки данных непосредственно или, например, через мультиплексор, выполненный с возможностью избирательной передачи сигналов регистрации излучения от нескольких пикселей. Таким образом, блок обработки данных может, например, анализировать сигналы регистрации излучения от отдельных пикселей или группы пикселей независимо от сигналов регистрации излучения от других пикселей.
Предпочтительно, чтобы излучатель и приемник были рассчитаны и согласованы друг с другом таким образом, чтобы в нормальных условиях измерений, т.е. при измерении расстояний, например, от нескольких сантиметров до нескольких сотен метров оптическим измерительным излучением, возвращающимся от целевого объекта, освещалось одновременно несколько пикселей. Однако в этом случае одновременное освещение нескольких пикселей используется не для того, чтобы - как в обычных SD-видеокамерах - формировать снимок целевого объекта или детектировать пространственное разрешение в отношении расстояния до отдельных участков на поверхности целевого объекта, а для обеспечения, в том числе, преимуществ в отношении чувствительности к регистрируемому излучению и/или допусков на юстировку, как это подробнее поясняется ниже. При этом расстояние между измерительным устройством и целевым объектом определяется на основе анализа сигналов регистрации излучения от нескольких пикселей, в частности от нескольких из одновременно облучаемых пикселей.
С этой целью излучатель может посылать измерительный луч, поперечное сечение достаточно велико, чтобы возвращающаяся от целевого объекта часть измерительного луча всегда освещала несколько пикселей. Для концентрирования измерительного излучения, возвращающегося от целевого объекта, и направления этого излучения на регистрирующую поверхность, чтобы таким образом обеспечить достаточно сильный сигнал регистрации излучения, на оптическом пути от излучателя до приемника может быть предусмотрена простая оптическая система, например в виде одной или нескольких линз. Эта простая оптическая система может быть выполнена в виде не имеющей автоматической фокусировки оптической системы, т.е. системы с постоянным фокусным расстоянием, что позволяет уменьшить стоимость и сократить издержки. Поскольку такая не имеющая автоматической фокусировки оптическая система с постоянным фокусным расстоянием может фокусировать возвращающийся от целевого объекта измерительный луч на регистрирующую поверхность приемника оптимально, т.е. с наименьшим диаметром пятна, только тогда, когда целевой объект находится на расстоянии от измерительного устройства, соответствующем фокусному расстоянию и плоскости изображения, т.е. на предметном расстоянии, число пикселей, одновременно освещаемых измерительным излучением, возвращающимся от целевого объекта, может быть переменным в зависимости от расстояния между целевым объектом и измерительным прибором. Например, оптимизация приемной оптической системы для приема измерительного излучения от сильно удаленных целевых объектов, т.е. объектов, находящихся на большом предметном расстоянии, может означать то, что фокусное расстояние и проекционное расстояние должны выбираться так, чтобы для большого предметного расстояния выполнялось условие геометрического отображения. Тем самым при большом удалении целевого объекта можно добиться наименьшего диаметра пятна в плоскости изображения (резкости изображения). Благодаря заданию фокусного расстояния и плоскости изображения число пикселей, освещаемых в случае измерения расстояния до ближе расположенного целевого объекта, может быть значительно больше, чем в случае измерения расстояния до сильно удаленного целевого объекта. В случае целевого объекта, находящегося ближе, возвращающееся измерительное излучение уже может не создавать резкого изображения, вследствие чего освещенный участок регистрирующей поверхности может стать соответственно большим.
Поскольку сигналы регистрации излучения от отдельных пикселей могут анализироваться независимо друг от друга, приемник и блок обработки данных могут быть выполнены с возможностью определения расстояния между измерительным устройством и целевым объектом на основе анализа сигналов регистрации излучения, получаемых исключительно от пикселей, на которые падает свет, возвращающийся от освещаемой излучателем поверхности целевого объекта. Иными словами, блок обработки данных может, например, в рамках предварительного измерения сначала определить, какие пиксели регистрирующей поверхности действительно принимают измерительное излучение, посылаемое излучателем, а какие пиксели лишь регистрируют фоновое излучение, и затем для действительного определения расстояния может использовать только сигналы регистрации излучения от пикселей, освещаемых измерительным излучением. Благодаря этому можно значительно повысить отношение "сигнал-шум".
Для определения расстояния между измерительным устройством и целевым объектом блок обработки данных может содержать множество устройств (элементов) определения расстояния (что в некоторых случаях также известно как "биннинг-схема" или схема организации вычислений в отдельных ячейках). Устройство определения расстояния может быть выполнено с возможностью определения данных, которые коррелируют с измеряемым расстоянием между измерительным устройством и целевым объектом и на основании которых в конечном итоге можно определить искомое расстояние. Например, можно определять время прохождения измерительного излучения от момента его посылки излучателем до момента регистрации на районирующей поверхности измерительного излучения, возвращающегося от целевого объекта, и на основании этого времени определять искомое расстояние. С этой целью устройство определения расстояния может сравнивать выдаваемую излучателем информацию о временной модуляции посылаемого измерительного излучения с выдаваемыми приемником сигналами регистрации излучения. В случае периодически модулированного измерительного излучения соответствующее расстояние можно определять, например, по разности фаз между сигналом исходящего излучения и сигналом регистрации входящего излучения.
В принципе, для определения расстояния между измерительным устройством и целевым объектом может быть достаточно и одного устройства определения расстояния. Для того чтобы число устройств определения расстояния было небольшим, может быть целесообразным направлять сигналы регистрации излучения от отдельных пикселей или группы пикселей в устройство определения расстояния друг за другом, т.е. последовательно, например с помощью мультиплексора. Следствием подобной последовательной обработки сигналов регистрации излучения может стать увеличение общей продолжительности измерения. В качестве альтернативы этому варианту, с каждым из пикселей может быть связано собственное устройство определения расстояния. В этом случае на основании каждого из сигналов регистрации излучения от множества пикселей может определяться соответствующее расстояние, причем расстояния могут определяться параллельно во времени, и на основании множества определенных расстояний в конечном итоге может определяться, например, путем осреднения измеряемое расстояние между устройством и целевым объектом. Правда, для этого в измерительном устройстве может потребоваться предусмотреть очень большое число устройств определения расстояния, что может усложнить конструкцию измерительного устройства и его производство.
В качестве компромиссного решения между этими двумя крайними альтернативами может быть предусмотрен вариант, в котором несколько пикселей соединены с одним устройством определения расстояния, а это устройство определения расстояния может быть выполнено с возможностью определения коррелирующих с расстоянием данных на основании сигналов регистрации излучения от нескольких пикселей. Соответственно в этом варианте блок обработки данных имеет множество устройств определения расстояния и может быть выполнен с возможностью определения расстояния между измерительным устройством и целевым объектом на основании коррелирующих с расстоянием данных, определенных устройствами определения расстояния, например путем осреднения.
Применение множества устройств определения расстояния позволяет сократить время, необходимое для нахождения пикселей, принимающих измерительное излучение, поскольку с помощью специально выбранных алгоритмов отбора можно параллельно оценивать переменные комбинации пикселей.
Число светочувствительных элементов или площадь поверхности отдельных светочувствительных элементов, содержащихся в одном пикселе, могут выбираться переменными в зависимости от местоположения пикселя в пределах регистрирующей поверхности приемника. Например, может быть известно, что измерительное излучение, возвращающееся от целевого объекта, падает на регистрирующую поверхность приемника в зависимости от расстояния от измерительного устройства до целевого объекта, в другом месте и/или с другой площадью поперечного сечения пучка. Соответственно число светочувствительных элементов в пределах одного пикселя или площадь их поверхности можно согласовать в зависимости от местоположения пикселя с ожидаемой интенсивностью падающего света. За счет такой коррекции площади поверхности светочувствительных элементов и/или их числа в пределах одного пикселя можно оптимизировать динамический диапазон измерительного устройства. Согласование площадей поверхности пикселей с размером лазерного пятна позволяет оптимизировать отношение "сигнал-шум".
Если, например, на пути прохождения света между излучателем и приемником расположена не имеющая автоматической фокусировки оптическая система, рассчитанная на оптимальное отображение сильно удаленных целевых объектов, т.е. на оптимальное фокусирование приходящего от них света, для сильно удаленных целевых объектов возвращающееся измерительное излучение может фокусироваться пятном малого диаметра. В пределах соответствующей области регистрирующей поверхности может быть целесообразным, чтобы каждый из пикселей содержал только один светочувствительный элемент или небольшое количество светочувствительных элементов. При направлении такого измерительного устройства с постоянным фокусным расстоянием на целевой объект, расположенный ближе, возвращающееся измерительное излучение уже не сфокусируется на регистрирующей поверхности малым пятном, а будет падать, возможно, в несфокусированном состоянии на большую область регистрирующей поверхности. В этом случае будет освещаться в общем большее число пикселей, чем в случае целевого объекта, расположенного на большом расстоянии. Поэтому на краевых участках освещаемой области регистрирующей поверхности может быть целесообразным объединить в отдельные пиксели по несколько светочувствительных элементов (с образованием "подмассива" или "кластера" светочувствительных элементов).
Например, излучатель и приемник могут быть расположены рядом друг с другом вдоль оси параллакса. Такие измерительные системы, называемые биаксиальными, могут иметь преимущество, связанное с отсутствием сложных технических средств выделения возвращающегося измерительного луча. В этом случае измерительный луч, посылаемый излучателем и возвращающийся от целевого объекта, будет падать на регистрирующую поверхность в зависимости от расстояния до целевого объекта в другом месте, смещенном вдоль оси параллакса, и может иметь в зависимости от расстояния до целевого объекта различные поперечные сечения. В этом случае может быть целесообразным, чтобы число светочувствительных элементов, содержащихся в одном пикселе, было переменным в зависимости от местоположения пикселя вдоль оси параллакса. В частности, может быть целесообразным выбирать число содержащихся в одном пикселе светочувствительных элементов в пикселях, близлежащих к излучателю, меньшим, чем в пикселях, удаленных от излучателя.
В другом варианте осуществления изобретения излучатель и приемник могут быть расположены соосно друг с другом. В случае такого "моноаксиального" (имеющего одну оптическую ось) измерительного устройства можно добиться, например, с помощью полупрозрачных зеркал, чтобы положение в пространстве центра области регистрирующей поверхности, освещаемой возвращающимся излучением, оставалось практически постоянным вне зависимости от расстояния до целевого объекта. Правда, от расстояния до целевого объекта все же может зависеть поперечное сечение луча, падающего на регистрирующую поверхность, т.е. размер освещаемой области на регистрирующей поверхности. При измерении расстояний до сильно удаленных целевых объектов с применением оптической системы с большим фокусным расстоянием пятно, высвечиваемое на регистрирующей поверхности, может быть малым, а при измерении расстояний до расположенных ближе целевых объектов пятно, высвечиваемое на регистрирующей поверхности, может иметь больший размер. Может быть целесообразным выбирать число содержащихся в одном пикселе светочувствительных элементов в пикселях, близлежащих к центру регистрирующей поверхности, меньшим, чем в пикселях, удаленных от центра регистрирующей поверхности.
Возможные аспекты, преимущества изобретения и формы его реализации были рассмотрены выше в отношении отдельных вариантов осуществления изобретения. Описание, поясняющие его чертежи, а также формула изобретения содержат множество признаков в определенной комбинации. Специалист также сможет рассматривать эти признаки, в том числе признаки различных вариантов осуществления изобретения, по отдельности и объединять их в другие рациональные комбинации.
Краткое описание чертежей
Ниже со ссылкой на прилагаемые чертежи рассматриваются варианты осуществления изобретения и содержащиеся в них отдельные аспекты изобретательского замысла. Чертежи исполнены схематически и не в масштабе. Одинаковыми или аналогичными ссылочными обозначениями на чертежах обозначены одинаковые или однотипные элементы.
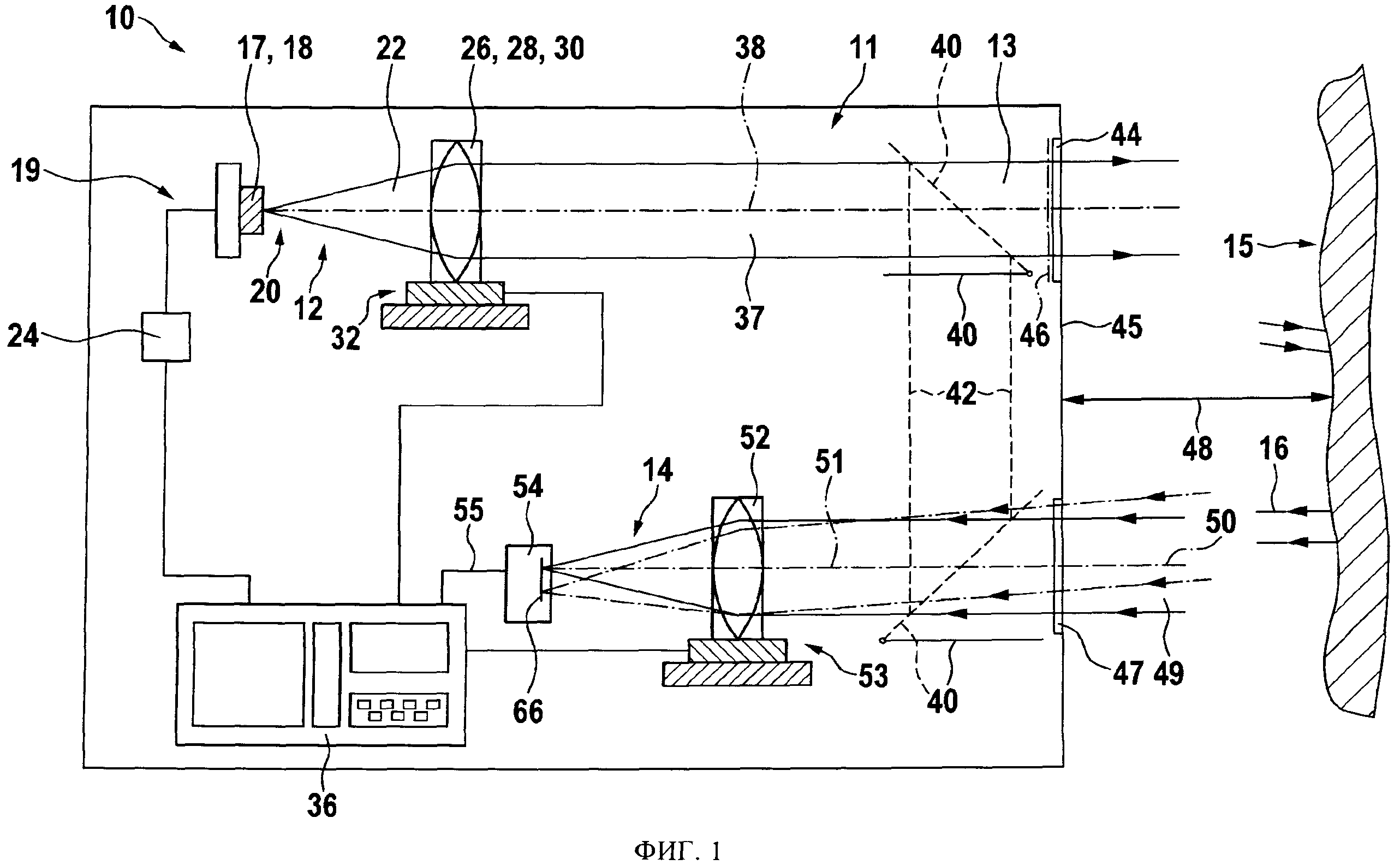
На фиг.1 показано измерительное устройство для оптического измерения расстояний в одном варианте осуществления настоящего изобретения.
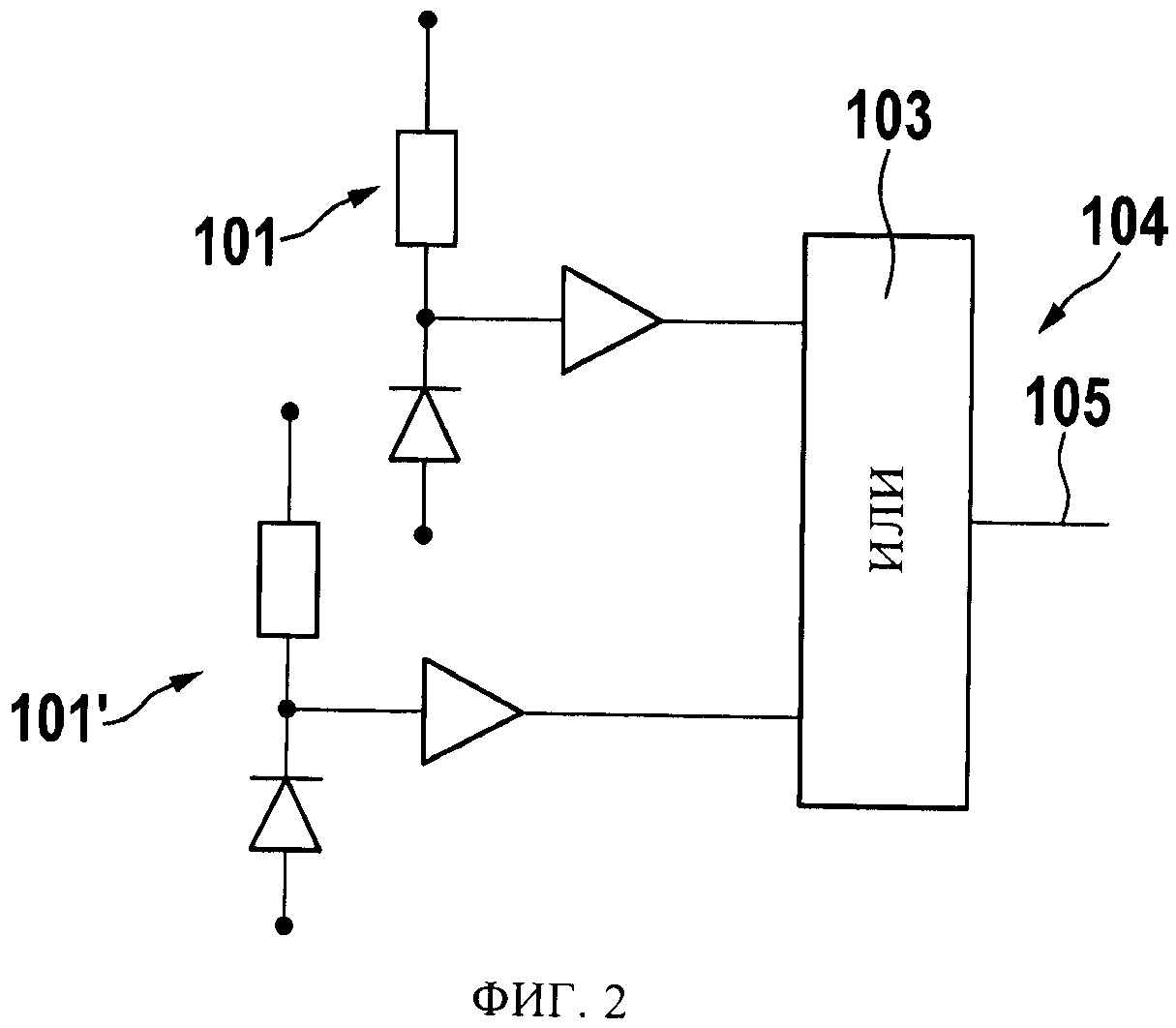
На фиг.2 схематически показаны два соединенных с сумматором светочувствительных элемента измерительного устройства в одном варианте осуществления настоящего изобретения.
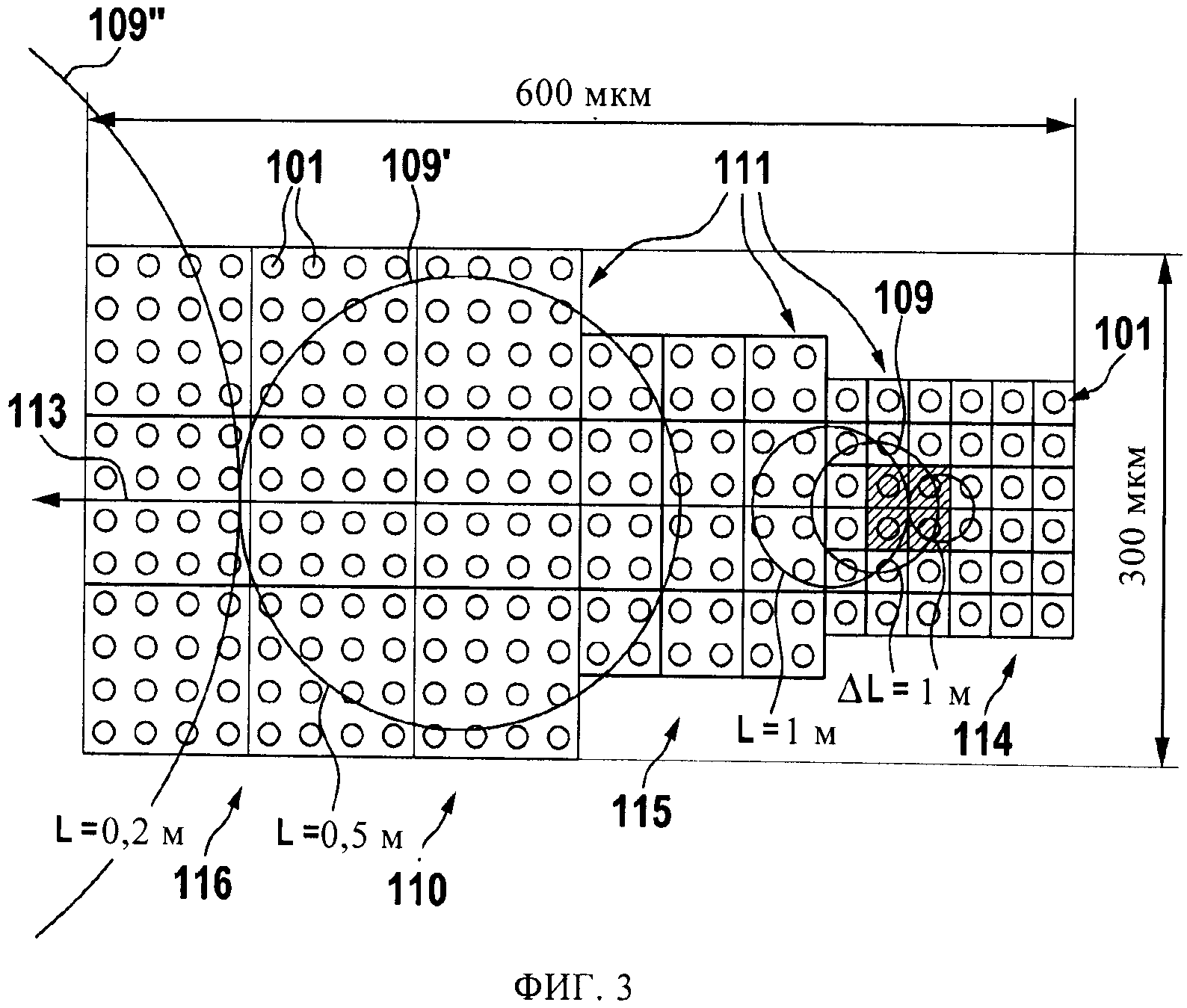
На фиг.3 показан вид в плане регистрирующей поверхности приемника измерительного устройства в одном варианте его выполнения.
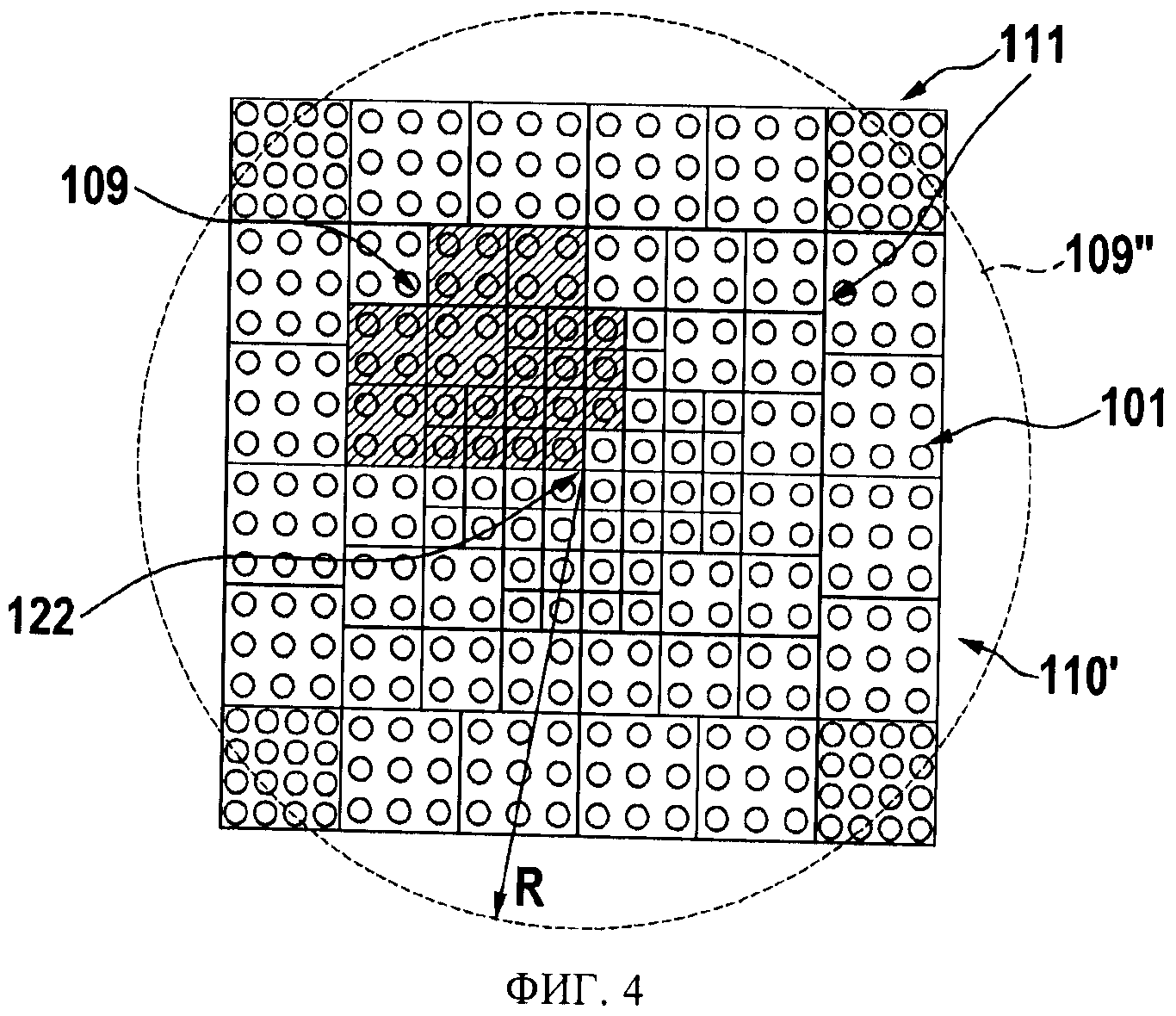
На фиг.4 показан вид в плане альтернативной регистрирующей поверхности приемника измерительного устройства в одном варианте его выполнения.
На фиг.5 показан одиночный светочувствительный элемент, соединенный с устройством определения расстояния.
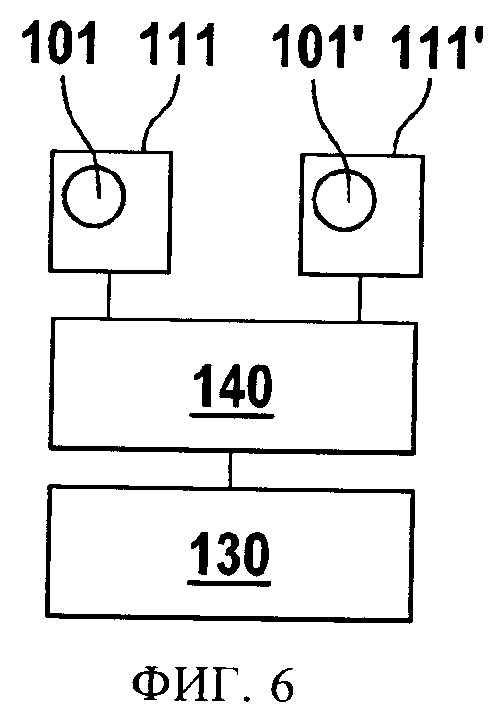
На фиг.6 показано два светочувствительных элемента, соединенных через мультиплексор с устройством определения расстояния.
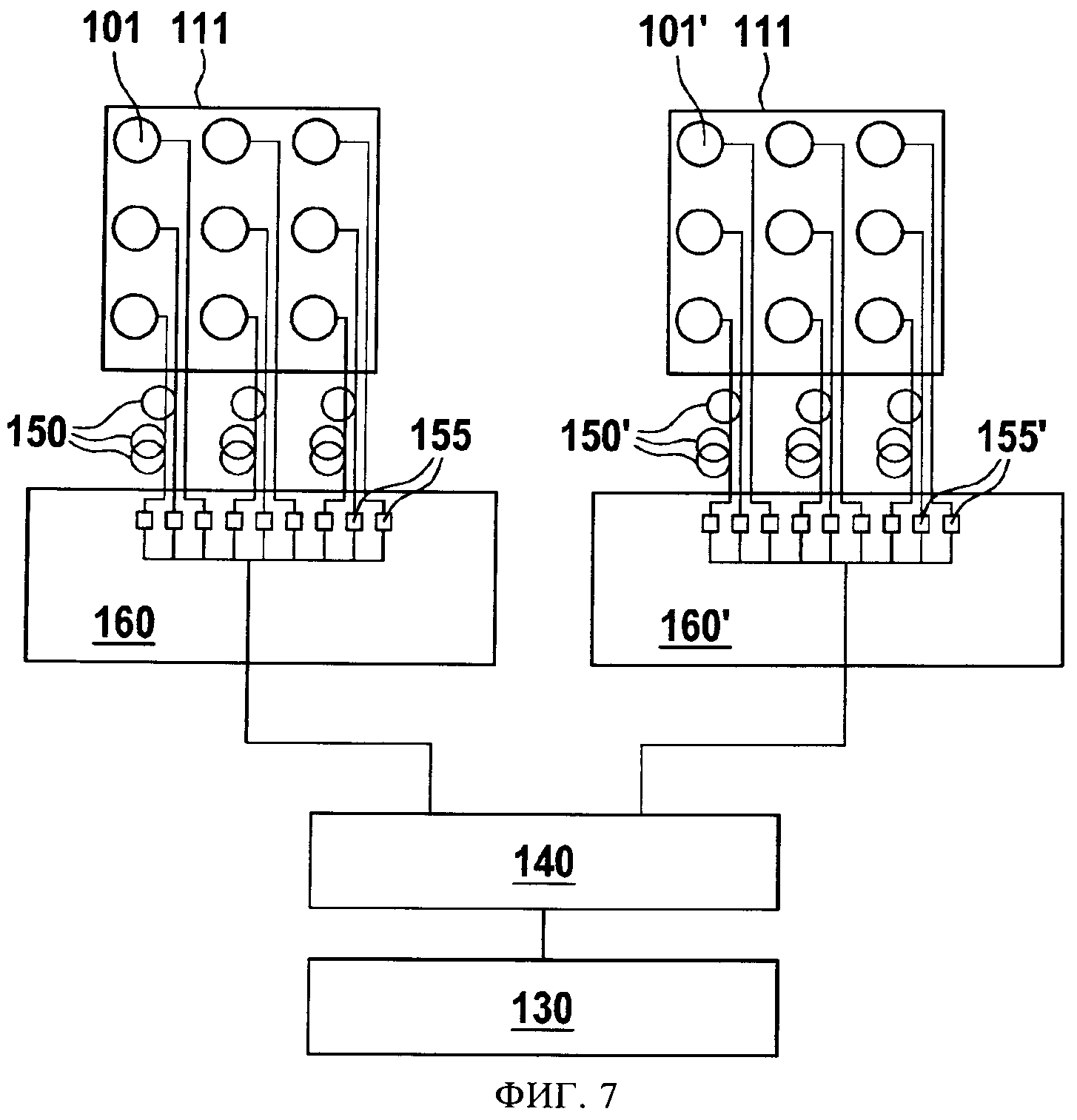
На фиг.7 показаны два пикселя, имеющих по девять светочувствительных элементов и соединенных через сумматор и мультиплексор с устройством определения расстояния.
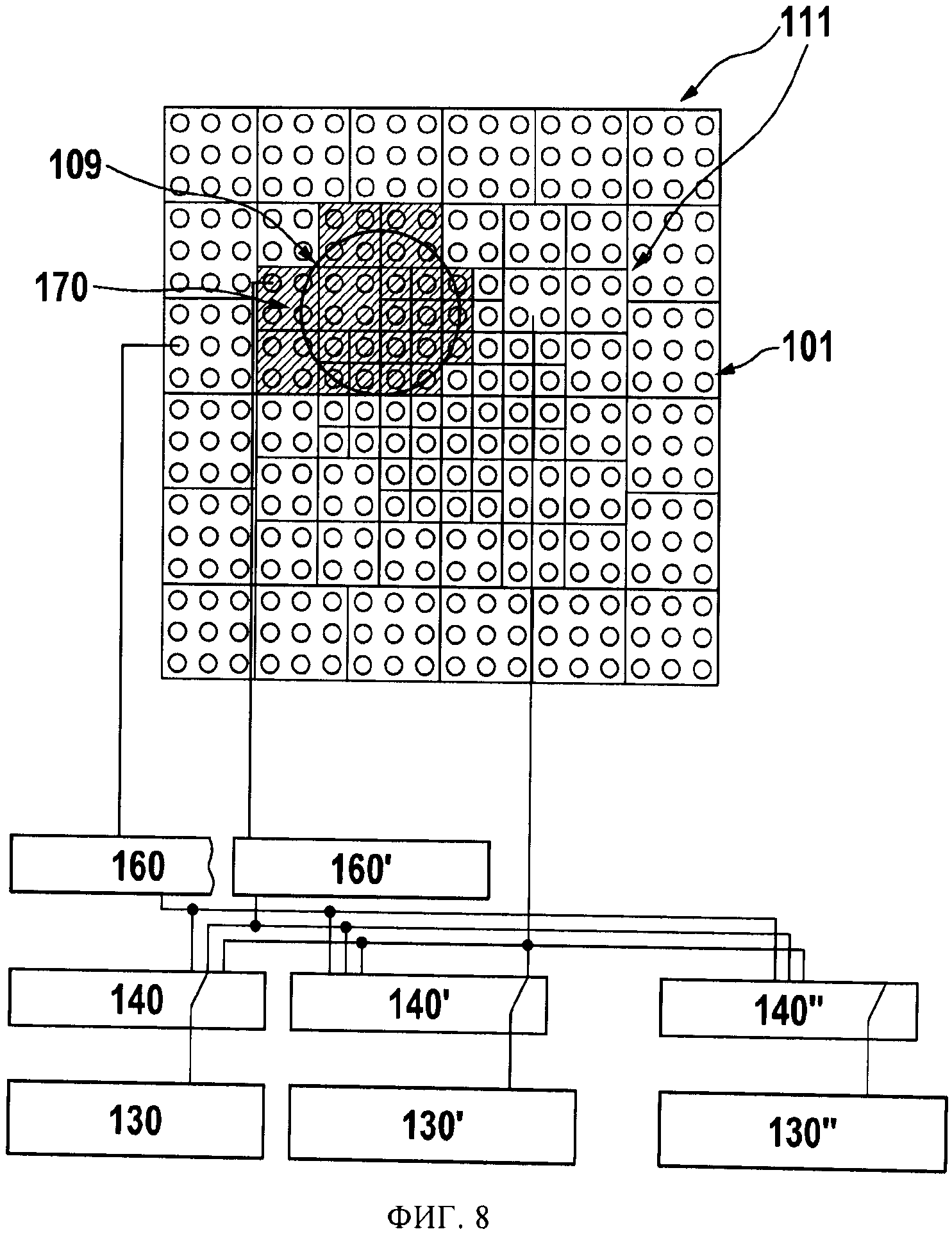
На фиг.8 показана регистрирующая поверхность приемника с пикселями, у которых число содержащихся в них светочувствительных элементов является переменным в зависимости от местоположения пикселя в пространстве и которые через сумматор и мультиплексор соединены с несколькими устройствами определения расстояния.
Осуществление изобретения
На фиг.1 схематически изображено предлагаемое в изобретении измерительное устройство 10 для оптического измерения расстояний (оптический дальномер), причем на схеме показаны компоненты измерительного устройства, наиболее важные для описания его функции.
Измерительное устройство 10 имеет корпус 11, в котором расположены излучатель 12 для испускания измерительного оптического излучения 13, а также приемник 14 для регистрации измерительного излучения 16, возвращающегося от целевого объекта 15.
Излучатель 12 включает в себя источник света, который в рассматриваемом варианте осуществления изобретения выполнен в виде полупроводникового лазерного диода 18. Лазерный диод 18 испускает лазерный луч 20 в форме светового пучка 22, видимого человеческому глазу. Для этого лазерный диод 18 приводится в действие блоком 24 управления, в котором с помощью соответствующих электронных устройств осуществляется временная модуляция электрического сигнала 19, подаваемого на вход лазерного диода 18. Благодаря такой модуляции тока диода оптическое измерительное излучение 13, используемое для измерения расстояний, также требуемым образом модулируется во времени по своей интенсивности.
Затем лазерный пучок 20 проходит коллиматор 26, выполненный в виде объектива 28, который на фиг.1 упрощенно изображен в виде отдельной линзы. В рассматриваемом варианте осуществления изобретения объектив 28 может быть расположен на подвижной опоре 32, в принципе обеспечивающей возможность изменения положения объектива во всех трех пространственных направлениях, например для его юстировки. Вместе с тем в альтернативном варианте коллиматор 26 может являться составной частью лазерного диода 18 или может быть неподвижно соединен с последним.
После прохождения объектива 28 образуется модулированный, например по амплитуде, сигнал измерительного излучения 13 в форме почти параллельного светового пучка 37, распространяющегося вдоль оптической оси 38 излучателя 12.
Кроме того, в измерительном устройстве также может быть предусмотрено устройство 40 отклонения излучения, предпочтительно переключаемое устройство отклонения излучения, которое предназначено для полного или частичного отклонения измерительного излучения 13 в обход целевого объекта 15 прямо, т.е. внутри прибора, на приемник 14. Таким образом можно создать внутри прибора базисный (опорный или эталонный) отрезок 42 пути лучей для калибровки и настройки измерительного устройства.
При проведении измерения расстояния с помощью измерительного устройства 10 измерительное излучение 13 выходит из корпуса 11 измерительного устройства через оптическое окно 44 в его передней стенке 45. Отверстие оптического окна 44 может быть защищено, например, заслонкой 46. Для выполнения собственно измерения измерительное устройство 10 направляют на целевой объект 15, расстояние 48 от измерительного устройства 10 до которого требуется определить. Сигнал 16, отраженный или рассеянный в обратном направлении целевым объектом 15, образует возвращающееся оптическое измерительное излучение 16 в форме пучка 49 или 50 лучей, определенная часть которых попадает обратно в измерительное устройство 10.
Возвращающееся измерительное излучение 16 проходит в измерительное устройство 10 через входное окно 47 на его передней стенке 45, после чего попадает, как показано на фиг.1, в приемную оптическую систему 52.
В целях пояснения и в качестве примера на фиг.1 показаны два пучка 49 и 50 возвращающегося измерительного излучения для двух различных расстояний 48 до целевого объекта. При большом расстоянии до объекта, где "большое расстояние" можно интерпретировать как большое относительно фокусного расстояния приемной оптической системы 52, возвращающееся от целевого объекта 15 оптическое измерительное излучение 16 распространяется приблизительно параллельно оптической оси 51 приемника 14. В показанном на фиг.1 варианте осуществления изобретения этот случай представлен пучком 49 измерительного излучения. С уменьшением расстояния до объекта возвращающееся измерительное излучение 16, падающее на измерительное устройство, будет все больше отклоняться от оптической оси 51 приемника 14 из-за параллакса. В качестве примера такого возвращающегося измерительного излучения в ближней зоне измерительного устройства на фиг.1 показан пучок 50 лучей.
Приемная оптическая система 52, которая на фиг.1 также изображена лишь схематически в виде отдельной линзы, фокусирует пучок возвращающегося измерительного излучения 16 на регистрирующую (чувствительную) поверхность 66 приемного детектора 54, предусмотренного в приемнике 14. Для регистрации оптического измерительного излучения детектор 54 имеет множество пикселей. Каждый из пикселей имеет по меньшей мере один светочувствительный элемент. Посредством предусмотренных в регистрирующей поверхности 66 светочувствительных элементов, которые расположены по отдельности или объединены в группы по типу пиксельной матрицы и связаны с блоком 36 обработки данных, возвращающееся измерительное излучение 16, падающее на регистрирующую поверхность, преобразуется в электрический сигнал 55, выдаваемый для его дальнейшего анализа в блоке 36 обработки данных.
Сигналы регистрации излучения, генерируемые отдельным светочувствительным элементом или комбинацией светочувствительных элементов, могут направляться в одно или несколько устройств определения расстояния, содержащихся в блоке 36 обработки данных. Устройство определения расстояния может суммировать (интегрировать) сигналы регистрации излучения и генерировать на этом основании сигнал, соответствующий зависящей от времени интенсивности падающего на соответствующие светочувствительные элементы светового сигнала, то есть интенсивности падающего света. Соотнося этот сигнал с сигналом возбуждения, отображающим характер изменения во времени интенсивности испускания фотонов излучателем, можно судить о времени пролета фотонов от излучателя до целевого объекта и обратно до приемника. Если излучатель осуществляет периодическую модуляцию испускаемого светового излучения, например, синусоидальным сигналом, то время пролета фотонов, т.е. прохождения излучения, можно определить по разности фаз между испускаемым и регистрируемым измерительным излучением.
На фиг.2 показана два светочувствительных элемента 101, 101', выдаваемые которыми сигналы регистрации излучения передаются в логический элемент ИЛИ 103. Логический элемент ИЛИ 103 действует в качестве сумматора 104, принимая как сигналы регистрации излучения с выхода первого светочувствительного элемента 101, так и сигналы регистрации излучения с выхода второго светочувствительного элемента 101' и выдавая на выходе 105 суммарный сигнал, формируемый из этих входных сигналов.
На фиг.3 схематически показана регистрирующая поверхность 110 детекторного устройства 54 для лазерного дальномера без коррекции параллакса. При этом на регистрирующей поверхности 110 начерчены круглые лазерные пятна 109, или пятна лазерного излучения, диаметр которых меняется в зависимости от расстояния L между измерительным устройством и целевым объектом. При этом было принято допущение, что используется идеальная линза с фокусным расстоянием f=30 мм, диаметром d=4 мм и параллаксом 5 мм для случая оптимальной юстировки в отношении больших расстояний. Лазерное излучение считалось имеющим расхождение 1 мрад. При таком выполнении регистрирующей поверхности 110 целесообразно, чтобы размер пикселей 111 или число светочувствительных элементов 101 в пределах соответствующих пикселей 111 увеличивался(-лось) вдоль оси 113 параллакса. При этом за ось параллакса принимается прямая линия, полученная пересечением плоскости регистрирующей поверхности и плоскости, определяемой оптической осью приемной оптической системы и осью лазерного луча дальномера. На чертеже видно, что в первой области 114, в которой лазерное пятно 109 оставлено лазерным лучом, возвращающимся от целевого объекта, находящегося на большом расстоянии, предусмотрены малые пиксели, каждый из которых содержит только один светочувствительный элемент. В области 115, в которой лазерное пятно 109' оставлено лазерным лучом, возвращающимся от целевого объекта, находящегося на расстоянии примерно от 0,5 до 1 м, предусмотрены большие пиксели, каждый из которых содержит четыре светочувствительных элемента. В еще одной области 116, в которой лазерное пятно 109” оставлено лазерным лучом от очень близких целевых объектов, предусмотрены особенно большие пиксели с восемью или шестнадцатью светочувствительными элементами. При этом приемная оптическая система оптимизирована таким образом, чтобы максимально возможное качество изображения, т.е. минимально возможный диаметр лазерного пятна на регистрирующей поверхности достигалось(-ался) при наибольшем расстоянии до целевого объекта.
При больших расстояниях лазерное пятно 109 сравнительно мало по причине резкого изображения. Одновременно интенсивность падающего света, состоящего из возвращающегося измерительного излучения и фонового излучения, сравнительно невелика ввиду небольшой доли измерительного излучения от сильно удаленного целевого объекта. В случае расположенных ближе целевых объектов в сторону регистрирующей поверхности 110 отражается или рассеивается от целевого объекта в целом больше измерительного излучения. В то же время приемная оптическая система с постоянным фокусным расстоянием уже не обеспечивает резкого отображения измерительного излучения на регистрирующую поверхность 110.
В целом, с геометрической точки зрения для лазерного дальномера с незначительно расходящимся лазерным лучом и приемной оптической системой с постоянным фокусным расстоянием интенсивность света в плоскости детектора для ее доли, относящейся к принимаемому лазерному излучению, при больших расстояниях уменьшается пропорционально квадрату расстояния, а при небольших расстояниях является неизменной по расстоянию. Доля же интенсивности, относящаяся к фоновому излучению, в первом приближении не зависит от расстояния.
При показанном на фиг.3 выполнении содержащихся в регистрирующей поверхности 110 пикселей 101 с зависимостью их размера от местоположения в пространстве достигается, во-первых, то, что и при больших, и при малых расстояниях до целевого объекта лазерное пятно 109 накрывает несколько пикселей 111 с возможностью его анализа этими пикселями. При этом размер активной регистрирующей поверхности можно оптимально согласовать с размером лазерного пятна, и таким образом можно оптимизировать отношение "сигнал-шум". Во-вторых, такое пространственно-зависимое выполнение пикселей также позволяет оптимально использовать динамический диапазон светочувствительных элементов, поскольку интенсивность падающего света (включая долю лазера и фона) при измерении больших расстояний меньше, чем при измерении малых расстояний. Поэтому в случае чувствительных (регистрирующих) поверхностей детекторов, освещаемых принимаемым измерительным излучением только при измерении малых расстояний, можно уменьшить площадь поверхности отдельных светочувствительных элементов. В областях детекторов, в которых интенсивность принятого измерительного излучения остается практически постоянной, число светочувствительных элементов 101, содержащихся в отдельных пикселях 111, может быть увеличено при неизменной площади поверхности светочувствительных элементов.
На фиг.4 показан вариант выполнения регистрирующей поверхности 110' для соосного лазерного дальномера или лазерного дальномера с коррекцией параллакса. Такая коррекция может обеспечиваться с помощью элемента ближней зоны или альтернативных известных методов. В подобном случае в основном преобладает искажение изображения (аберрация), обусловленное конечной глубиной резкости приемной оптической системы, что делает выгодным концентрическое расположение пикселей одинакового размера. Лазерный луч, возвращающийся от целевого объекта, находящегося на большом расстоянии, хорошо фокусируется и создает вблизи центра 122 регистрирующей поверхности 110', т.е. вблизи точки прохождения оптической оси приемной оптической системы через плоскость регистрирующей поверхности, относительно небольшое лазерное пятно 109. Лазерный луч, возвращающийся от целевого объекта, находящегося на меньшем расстоянии, создает лазерное пятно 109” значительно большего диаметра. Вблизи центра 122 пиксели 111 имеют меньшую площадь поверхности и меньшее число содержащихся в них светочувствительных элементов 101, чем на удалении от центра 122 регистрирующей поверхности 110', т.е. у края регистрирующей поверхности.
На фиг.5-7 в виде структурной схемы представлены отдельные элементы, используемые для реализации приемника в соответствии с вариантами осуществления настоящего изобретения.
На фиг.5 показан пиксель 111 с одним светочувствительным элементом 101. Пиксель соединен с устройством 130 определения расстояния.
На фиг.6 показано два пикселя 111, 111' с одним светочувствительным элементом 101, 101' каждый. Пиксели 111, 111' соединены с мультиплексором 140, который избирательно передает в устройство 130 определения расстояния сигналы регистрации излучения, выдаваемые пикселями 111, 111'.
На фиг.7 показана группа из двух пикселей 111, 111', имеющих по девять светочувствительных элементов 101, 101'. Сигналы регистрации излучения от отдельных светочувствительных элементов 101, 101' направляются при необходимости после временной задержки, создаваемой дополнительными элементами 150, 150' задержки, в соответствующие сумматоры 160, 160'. Эта задержка может служить цели компенсации различий во времени прохождения сигналов и таким образом может обеспечивать синхронизацию светочувствительных элементов одного пикселя или различных пикселей. В сумматорах 160, 160' сигналы регистрации излучения складываются друг с другом. Сложенные сигналы регистрации излучения передаются сумматорами 160, 160' в мультиплексор 140, а из него - в устройство 130 определения расстояния.
На фиг.8 показан особый вариант выполнения предлагаемого в изобретении дальномера с коррекцией параллакса и использованием таких элементов для N=92 пикселей 111. При этом 48 пикселей имеют только по одному светочувствительному элементу, 24 пикселя имеют по четыре светочувствительных элемента, расположенных по схеме 2×2, а 20 пикселей имеют по 9 светочувствительных элементов, расположенных по схеме 3×3. Каждый пиксель 111, имеющий более чем один светочувствительный элемент 101, соединен ровно с одним сумматором 160, 160'. Соответственно число сумматоров 160 равно 44. Выходы пикселей 111, имеющих только один светочувствительный элемент и выходы сумматоров 160, соединены с входами К мультиплексоров 140. Выходы мультиплексоров 140, в свою очередь, соединены с М≥2 устройствами 130 определения расстояния. При этом ни условие М=К, ни условие М=N необязательно должны выполняться. Для примера на чертеже представлены соединения трех пикселей 111 различных размера и числа светочувствительных элементов. Заштрихованный на фиг.8 участок поверхности показывает эффективную регистрирующую поверхность 170 детектора, содержащую те пиксели 111, которые действительно освещаются лазерным излучением и накрыты соответствующим лазерным пятном 109 и с помощью которых может выполняться измерение расстояний до целевого объекта.
В заключение следует еще раз иными словами обобщить аспекты и преимущества изобретения в различных вариантах его осуществления.
Один вариант основывается на идее эффективной организации расположения отдельных светочувствительных элементов в пикселях, сигналы которых суммируются перед их передачей для дальнейшей обработки в блок обработки данных во времени, содержащий множество устройств определения расстояния. При этом несколько светочувствительных элементов, сигналы которых складываются сумматором, образуют один пиксель.
Пиксели могут функционировать независимо друг от друга. В частности, для каждого отдельного пикселя может выполняться анализ фазы непрерывной волны или же анализ времени прохождения импульса излучения.
Пространственное объединение нескольких светочувствительных элементов в пиксели можно осуществлять из условия оптимизации отношения "сигнал-шум" как при больших, так и при малых расстояниях, в частности в условиях сильного фонового освещения при небольшом числе устройств определения расстояния. Достигается это посредством независимой от местоположения на регистрирующей поверхности адаптации размера пикселей или числа светочувствительных элементов, объединяемых в один пиксель.
Организация расположения, опционально, пикселей, имеющих только один светочувствительный элемент, или пикселей, имеющих различные размеры и число светочувствительных элементов, целенаправленно оптимизированная для повышения отношения "сигнал-шум" в лазерном дальномере, представляет собой одну из отличительных особенностей изобретения по отношению как к обычным лазерным дальномерам, так и к трехмерным (3D) фото- или видеокамерам. Такое расположение может снизить требования к юстировке оптической системы, находящейся внутри измерительного устройства, и одновременно может способствовать оптимизации отношения "сигнал-шум", даже если приемник расположен не в плоскости изображения оптической системы, как это может иметь место, например, в системах с постоянным фокусным расстоянием.
Регистрирующая поверхность может быть выполнена таких размеров, чтобы снижать требования к юстировке приемной оптической системы. Кроме того, может быть сведено к минимуму влияние ошибок оптического изображения, в частности ошибок, обусловленных расфокусировкой ввиду слишком малой глубины резкости. Это позволяет снизить требования к оптическому качеству приемной оптической системы.
Еще одним преимуществом может быть оптимизация отношения "сигнал-шум", особенно в случае больших измеряемых расстояний при высокой доле фонового света. Это достигается за счет того, что при любых расстояниях эффективную регистрирующую поверхность можно оптимально согласовать с размером действительно отображаемого в ее плоскость пятна измерительного лазерного излучения, т.е. минимизировать ее. По завершении измерения можно целенаправленно анализировать сигналы только от тех отдельных светочувствительных элементов или пикселей с несколькими светочувствительными элементами, которые действительно принимают лазерное излучение. Это позволяет уменьшить эффективную регистрирующую поверхность и минимизировать шумовой вклад фонового света, что может быть равнозначным улучшению отношения "сигнал-шум".
Еще одно преимущество может состоять в том, что благодаря объединению нескольких светочувствительных элементов в одном пикселе количество необходимых устройств определения расстояния меньше количества имеющихся светочувствительных элементов. Это позволяет уменьшить потребную площадь кристалла интегральной схемы. В частности, в случае лазерных дальномеров, которые, как правило, работают с постоянным фокусным расстоянием, это преимущество может сыграть важную роль, поскольку в этом случае диаметр лазерного пятна может изменяться в зависимости от расстояния до целевого объекта. На фиг.6 это поясняется для системы, в которой отсутствует коррекция погрешности от параллакса. Для того чтобы оптимизировать отношение "сигнал-шум" за счет минимизации эффективной регистрирующей поверхности, как это описано выше, при больших диаметрах лазерного пятна, т.е. как правило, при меньших расстояниях до целевого объекта, соответственно может потребоваться меньшее разрешение детектора. Этим обстоятельством можно воспользоваться путем зависящего от местоположения объединения светочувствительных элементов в пиксели.
Поскольку эффективная регистрирующая поверхность, т.е. площадь регистрирующей поверхности, учитываемой при анализе результатов измерения, как правило, меньше полной площади регистрирующей поверхности, число требующихся устройств определения расстояния можно еще более уменьшить, если в дополнение к объединению светочувствительных элементов также использовать мультиплексирование. В этом случае с помощью предварительных измерений можно сначала идентифицировать пиксели, принимающие лазерное излучение, а затем для выполнения собственно измерения расстояния распределить эти пиксели по устройствам определения расстояния. Если за N принять общее число пикселей с одним или несколькими светочувствительными элементами, а за М - число располагаемых устройств определения расстояния, которые можно использовать для анализа, то для вышеупомянутого идентифицирования используемых пикселей потребуется выполнить максимум N/M после округления предварительных измерений. Таким образом, задачу по измерению расстояния можно решить с помощью небольшого числа измерений, в идеальном случае - за одно измерение.
Еще одно преимущество может заключаться в том, что отдельные пиксели можно калибровать, например, в отношении фазового смещения, независимо друг от друга.
Сверлильный инструмент для технологических машин вращательного и/или ударного действия
Регулировочный диск для выставления остаточного воздушного зазора
Сверлильный инструмент, прежде всего для технологических машин вращательного и/или ударного действия
Способ изготовления дросселирующих отверстий с низко расположенной точкой возникновения кавитации
Соединительное устройство для шарнирного соединения с соединительным элементом, неподвижно соединенным с рычагом щетки стеклоочистителя
Соединительное устройство для соединения рычага щетки стеклоочистителя с щеткой стеклоочистителя
Ручная машина с переключаемым механизмом
Тормозной диск
Блок управления и способ для приведения в действие средств безопасности, а также датчик для выдачи сигнала аварийной ситуации
Электродинамическое тормозное устройство для универсального двигателя
Ручная машина со штекерным устройством
Катушка зажигания
Технологическая машина, прежде всего ручная машина
Электромагнитный узел электромагнитного клапана
Блок управления средствами безопасности для автомобиля и способ сборки блока управления средствами безопасности для автомобиля
Топливная форсунка с состоящим из двух частей якорем электромагнита
Щетка стеклоочистителя
Ручная машина для рабочих инструментов ударного действия
Блок управления и способ для приведения в действие средств безопасности для транспортного средства
Способ назначения маршрута и устройство для его осуществления

