Результат интеллектуальной деятельности: СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА
Вид РИД
Изобретение
Изобретение относится к дистанционно-управляемым боевым роботизированным комплексам, предназначенным для решения задач силовых структур РФ, в частности, к способам их программного обеспечения и информационного обмена данными.
Известны способ эксплуатации технической установки и система управления процессом эксплуатации технической установки (см. патент RU 2273874 С2, МПК G05B 19/18, опубл. 10.04.2006 г., Бюл. №10), принятый за прототип. Изобретение относится к области систем автоматического управления технологическими процессами. В соответствующем изобретению способе используется, по меньшей мере, одна управляющая вычислительная машина (блок ЭВМ) и некоторое количество полевых приборов (периферийные устройства), причем сигналы состояния и управляющие сигналы между, по меньшей мере, частью полевых приборов и управляющей вычислительной машиной передают с применением протокола TPC/IP через канал связи, предпочтительно радиосвязи и/или Интернет. Соответствующая изобретению система управления процессом содержит управляющую вычислительную машину с Web-сервером, вычислительную машину клиента с браузером Интернета, а также множество сенсоров и позиционеров; система управления процессом является предпочтительно обслуживаемой посредством Интернета через вычислительную машину клиента.
Передача информации по проводным и беспроводной линиям связи и формирование пакетов для передачи данных по указанным линиям осуществляется согласно протоколам передачи данных.
Недостатками прототипа являются:
- высокая конфигуративная сложность системы;
- недостаточная степень надежности работы используемой информационно-вычислительной системы;
- ограниченное количество реализованных алгоритмов.
Предлагаемым изобретением решается задача по повышению эффективности и надежности информационного обмена между составными частями дистанционно-управляемого боевого роботизированного комплекса.
Технический результат, получаемый при осуществлении изобретения, заключается в создании способа информационного обеспечения робототехнического комплекса, обеспечивающего в рамках протоколов информационного обмена автономное ориентирование (определение дирекционного угла), определение собственных координат местоположения по сигналам спутниковой навигации, в режиме одометрической навигации и комплексированном режиме, определение углового положения в пространстве, передачу данных по цифровому радиоканалу о состоянии комплекса (координаты, углы), прием по цифровому радиоканалу команд управления от командного пункта, передачу по радиоканалу маскированного телевизионного сигнала от трех камер.
Указанный технический результат достигается тем, что в предлагаемом способе информационного обеспечения робототехнического комплекса, включающем в себя блок ЭВМ и периферийные устройства, установленные на объекте управления и взаимодействующие между собой по каналу связи посредством взаимообмена сигналами управления и состояния в соответствии с протоколом обмена согласно программному обеспечению, новым является то, что программное обеспечение робототехнического комплекса состоит из встроенного программного обеспечения платформы робототехнического комплекса, обеспечивающего решение задач управления и навигации в реальном масштабе времени, программного обеспечения пункта управления, целевыми платформами для которого являются Windows и МСВС (мобильная система вооруженных сил), программное обеспечение платформы функционирует в двух уровнях - уровень обеспечения сопряжения с аппаратными средствами (драйверы) и прикладной уровень, построенный в виде иерархии скриптов отдельных подзадач, программное обеспечение платформы реализует алгоритмы следующих режимов состояния платформы: ВЫКЛЮЧЕНА/ВКЛЮЧЕНА, и ожидает команды (ОЖИДАНИЕ), работа от аккумуляторной батареи, работа от станции питания через аккумуляторную батарею, выполнение команд управления, по запросу пункта управления с платформы передается телеметрическая информация в соответствии с ранее установленной маской, обеспечивающей сокращение объема передаваемой информации, или телеметрическая информация в полном объеме: геодезические координаты местоположения, углы Эйлера положения платформы в градусах, минутах, секундах, состояние видеокамер, частота канала, тип кодирования, состояние аккумуляторных батарей, состояние станции питания, состояние приводов, сведения о внешней обстановке, с пункта управления подаются команды управления на видеокамеры, систему топопривязки и ориентирования, станцию питания, на устройства обеспечения движения платформы, алгоритм управления движением реализует формирование сигналов акселератора на правый и левый борт, сигналов торможения двигателей, программного сигнала завершения движения, отработку направления движения левого и правого борта, управление редукторами бортов, в рамках алгоритма управления движением сформирован алгоритм рассогласования бортов по скорости, обеспечивающий поворот платформы за счет различия скоростей движения бортов платформы, при движении платформы по заданному маршруту используются два алгоритма: движение по кусочно-линейному маршруту - по прямой линии от точки к точке с поворотом на угол в узлах, движение по гладкой траектории (квадратичная аппроксимация), позволяющий выполнять плавное движение по траектории, протокол обмена платформы с пунктом управления подразумевает информационный обмен в полудуплексном режиме со структурой ВЕДУЩИЙ-ВЕДОМЫЙ, в программном обеспечении предусмотрен механизм защиты от потери связи, интерфейс оператора платформы выполнен по принципу получения максимальной информативности, минимального управления и содержит основные рабочие области экрана ЭВМ: область оперативного уведомления, видеоданные от видеокамер, область отображения электронной карты местности, область физического состояния платформы, область отображения детальных данных, область управления подсистемами и приборами.
Выполнение программного обеспечения робототехнического комплекса из встроенного программного обеспечение платформы и программного обеспечения пункта управления позволяет:
- решать задачи реального времени управления, навигации и ориентирования;
- отслеживать положения робототехнического комплекса на фоне электронной карты местности;
- получать сообщения о состоянии платформы, требующие внимания или немедленной реакции оператора;
- получать видеоданные от видеокамер;
- получать данные, отображающие углы продольного и поперечного наклона платформы, количество заряда батареи, количество топлива в баке, скорость движения и оценочный запас хода.
Функционирование программного обеспечения платформы в двух уровнях позволяет:
- обеспечить сопряжение прикладного уровня программного обеспечения с аппаратными средствами платформы;
- выполнять первичную обработку информационных потоков.
Реализация посредством программного обеспечения платформы алгоритмов состояния позволяет:
- управлять включением/выключением, электропитанием платформы;
- обеспечить автономное ориентирование, определение собственных координат местоположения;
- обеспечить передачу данных по цифровому радиоканалу о состоянии платформы;
- обеспечить прием по цифровому радиоканалу команд управления от командного пункта;
- обеспечить передачу по радиоканалу маскированного телевизионного сигнала от трех видеокамер.
Передача по запросу пункта управления с платформы телеметрической информации в соответствии с ранее установленной маской или телеметрической информации в полном объеме позволяет:
- обеспечить при необходимости сокращение объема передаваемой информации;
- по отдельным подсистемам при наличии отказа получить по отдельным запросом детальную информацию;
- при телеметрии в полном объеме получить о состоянии всех систем.
Реализация алгоритма управления движением позволяет на основании исходных данных формировать управляющие сигналы на подсистемы движителя платформы, обеспечивая ее движение по заданному маршруту.
Реализация алгоритма рассогласования бортов по скорости позволяет реализовать поворот платформы за счет разницы скорости вращения силовых установок.
Использование при движении платформы по заданному маршруту двух алгоритмов: движение по кусочно-линейному маршруту, движение по гладкой траектории (квадратичная аппроксимация) позволяет:
- в первом случае обеспечить движение по прямой линии от точки к точке и поворот на угол в узлах;
- во втором случае осуществлять плавное движение по траектории без остановок на максимально возможной скорости.
Реализация протокола информационного обмена платформы с пунктом управления в полудуплексном режиме со структурой ВЕДУЩИЙ-ВЕДОМЫЙ позволяет инициировать обмен за счет ВЕДУЩЕГО, которым является пункт управления.
Наличие в программном обеспечении механизма защиты от потери связи позволяет снизить вероятность травмоопасных ситуаций, вероятность повреждения робототехнического комплекса.
Выполнение интерфейса оператора платформы по принципу получения максимальной информативности, минимального управления и оптимального разделения экрана ЭВМ на основные рабочие области позволяет:
- формировать интуитивно понятную для восприятия информацию о состоянии платформы и показаниях ее датчиков
- сконцентрировать внимание оператора на информации, получаемой от платформы.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
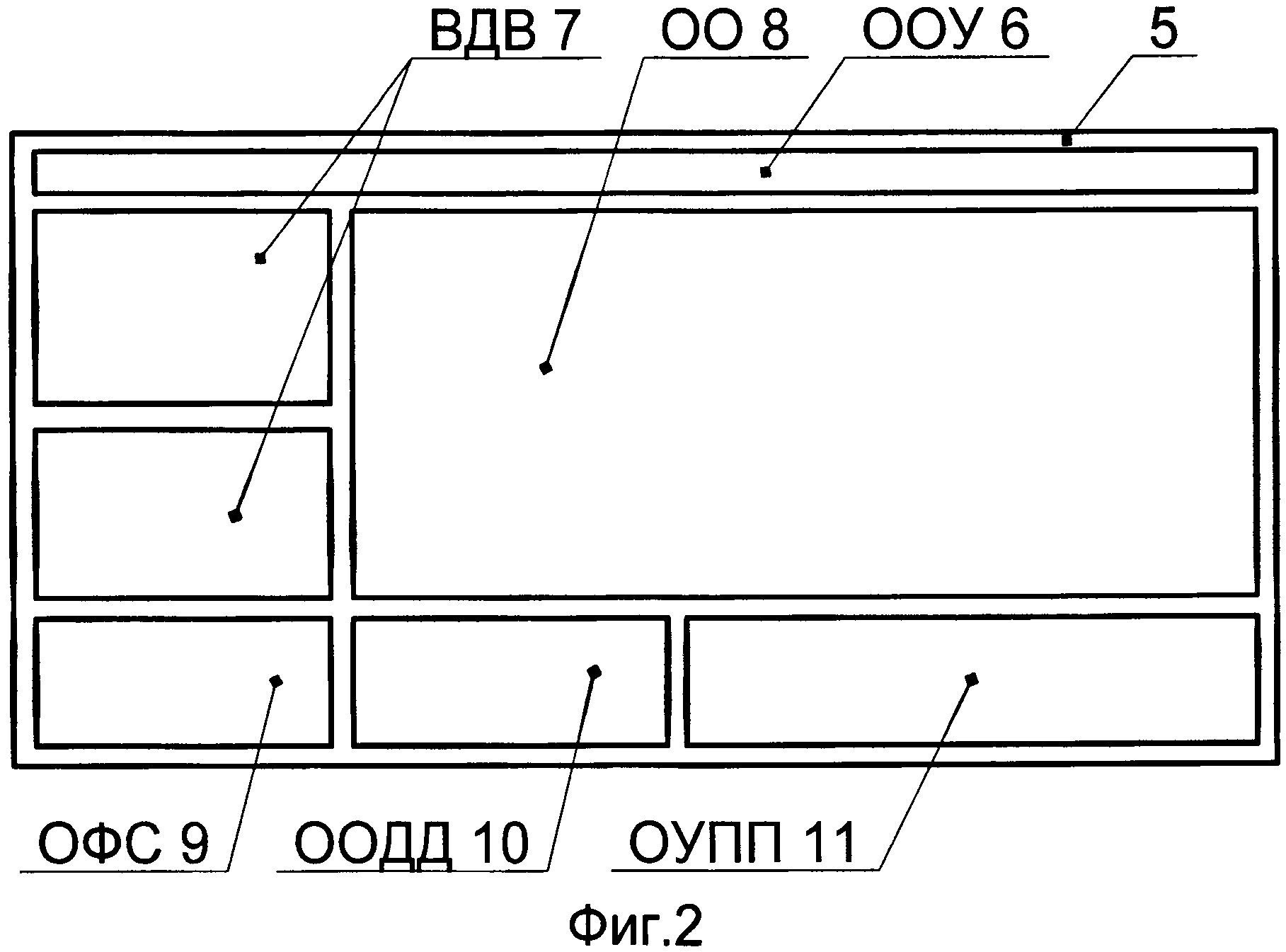
Сущность изобретения поясняется чертежами, где на фиг.1 показана структура управляющего программного обеспечения; на фиг.2 - главный экран пункта управления.
Способ информационного обеспечения роботехнического комплекса реализуется следующим образом.
Программное обеспечение робототехнического комплекса (РТК) состоит из встроенного программного обеспечения платформы, программное обеспечение пункта управления.
1. ПО платформы.
В силу специфики встроенного программного обеспечения (ПО) платформы (задачи реального времени управления и навигации) в качестве целевой платформы используется операционная система QNX. Указанная операционная система сертифицирована для МО РФ.
2. ПО пункта управления.
Одной из основных задач пункта управления является отслеживание положения РТК на фоне электронной карты местности (ЭКМ). В настоящее время в МО РФ принят единственный стандарт ЭКМ - это ГИС Интеграция. Целевыми платформами для программного обеспечения являются Windows и МСВС (мобильная система вооруженных сил). Учитывая развитые средства разработки и сертификации для МО РФ, за целевую платформу выбрана МСВС.
3. Структура управляющего ПО.
Для управляющего ПО использованы следующие языки программирования и трансляторы: GCC (компилятор языка С), Python 3.х (интерпретатор языка Пайтон).
ПО платформы состоит из двух уровней - уровень обеспечения сопряжения с аппаратными средствами (драйверы) и прикладной уровень. Драйверы устройств (рассмотрим драйвер системы навигации и ориентирования (СНО 1)) обеспечивают сопряжение прикладного (управляющего) уровня ПО с аппаратными средствами платформы, выполняя при этом первичную обработку информации. На примере навигационной системы - это получение данных от трех источников навигационной информации: аппаратуры спутниковой навигации (АСН) 2, бесплатформенной инерциальной навигационной системы (БИНС) 3, механического датчика скорости (МДС) 4 и формирование в зависимости от текущих настроек данных для прикладного уровня ПО. Такая структура позволяет на прикладном уровне абстрагироваться от аппаратных протоколов обмена с приборами и подсистемами, получая от драйвера уже обработанные «чистые» данные. Драйверы устройств могут быть встроенными в операционную систему, либо быть разработаны. Средством разработки драйверов является компилятор GCC, обеспечивающий необходимое быстродействие.
Прикладной уровень ПО построен на основе интерпретируемого языка программирования - Python 3.х в виде иерархии скриптов отдельных подзадач - главный управляющий скрипт распределяет потоки данных от драйверов устройств частным целевым скриптам.
Такая структура построения позволяет сделать управляющее ПО (как имеющее максимальную ценность) платформенно независимым, доступным для корректировки и имеющим максимально возможный срок актуальности, т.к. замена аппаратных вычислительных средств не влечет изменения данного ПО.
4. Алгоритмы функционирования платформы.
Платформа может находится в следующих режимах: ВЫКЛЮЧЕНА/ВКЛЮЧЕНА, ОЖИДАНИЕ, работа от аккумуляторной батареи (АКБ), работа от станции питания через АКБ, выполнение команд управления.
Основные выполняемые функции:
- автономное ориентирование (определение дирекционного угла);
- определение собственных координат местоположения по сигналам спутниковой навигации, в режиме одометрической навигации и режиме АСН+одометрия;
- определение углового положения в пространстве;
- передача данных по цифровому радиоканалу о состоянии платформы (координаты, углы и т.д.);
- прием по цифровому радиоканалу команд управления от командного пункта;
- передача по радиоканалу маскированного телевизионного сигнала от трех камер.
5. Телеметрические данные, передаваемые от платформы.
По запросу пункта управления передается телеметрическая информация в соответствии с ранее установленной маской, обеспечивающей сокращение объема передаваемой информации. По отдельным подсистемам при наличии флага отказа можно получить отдельным запросом детальную информацию.
Запросы могут быть двух типов:
- телеметрия по маске;
- телеметрия в полном объеме.
Маска представляет собой четыре байта, биты которых в зависимости от значения разрешают или запрещают передачу соответствующего им поля данных.
Формат передачи данных - текстовый построчный, кодировка UTF-8, разделитель строк - символ\n. В начале каждого пакета телеметрии, передаваемого по маске, выдается наличие аварийных ситуаций подсистем и приборов.
Телеметрия в полном объеме:
- геодезические координаты местоположения - B, L, H;
- углы Эйлера положения платформы в градусах, минутах, секундах;
- состояние видеокамер - включена/выключена, частота канала, тип кодирования;
- состояние АКБ - напряжение, перегрузки (да/нет), перегрев;
- состояние станции питания - топливо, напряжение, ток, отказы (да/нет);
- привода - температура блока управления, температура двигателя, отказы (да/нет);
- внешняя обстановка - наличие препятствий, их расположение, проблемы шасси.
Перечень команд управления:
- включить/выключить видеокамеру N;
- установить номер канала для видеокамеры N;
- установить тип кодирования сигнала для камеры N с исходным значением R;
- режим автономного ориентирования;
- команда управления ACH - «строка управления»;
- задание режима навигации - режим N;
- задание коэффициентов навигации, ориентирования - «строка коэффициентов»;
- включить/выключить станцию питания;
- команда на начало движения (скорость левый борт, скорость правый борт);
- экстренный останов платформы;
- маршрутное задание номер N - «строка задания»;
- начать/закончить маршрутное задание номер N.
6. Алгоритм управления движением платформы.
Исходными данными для алгоритма являются:
- текущие координаты местоположения (спутниковая навигация, одометрическая навигация);
- текущее угловое положение платформы в пространстве;
- текущие скорости движения (общий вектор, скаляры правого и левого борта);
- заданные точки маршрута;
- разворот;
- параметры маршрута (кривизна, допуск и т.д.);
- команда пауза / старт.
Выходные данные алгоритма:
- сигналы акселератора на правый и левый борт;
- направление движения левого и правого борта;
- сигналы торможения двигателей;
- управление редукторами бортов;
- программный сигнал завершения движения.
На основании исходных данных алгоритм управления движением формирует управляющие сигналы на подсистемы движителя платформы, обеспечивая ее движение по заданному маршруту.
Отдельными видами сигналов из перечисленных являются:
- команда пауза/старт;
- программный сигнал завершения движения.
Команда пауза/старт используется для адаптивного управления движением в зависимости от внешних условий. Источником данного сигнала может быть оператор или внешний алгоритм (например, алгоритм детектирования препятствия), при этом в зависимости от оценки внешней обстановки возможна отмена текущего маршрута и назначение нового.
Программный сигнал завершения движения формируется при достижении платформой конечной точки маршрута с заданной точностью.
Маршрут, как правило, задается набором последовательных точек, через которые должна пройти платформа. Одними из важных параметров маршрута являются допуск и тип аппроксимации. Так как подсистема навигации имеет конечную точность, необходимо вводить допуск на прохождение контрольных точек маршрута. Тип аппроксимации маршрута зависит от обстановки на местности и ее типа (поле, дорога, город и т.д.) и в конечном итоге влияет на скорость прохождения маршрута. Аппроксимация маршрута может быть кусочно-линейной и квадратичной. Квадратичная аппроксимация позволяет проходить контрольные точки на максимально возможной скорости (в зависимости от кривизны), при кусочно-линейной аппроксимации для прохождения контрольных точек необходимо снижение скорости движения до минимальной. Выбор типа аппроксимации зависит от многих условий и выбирается оператором исходя из основных критериев: точность следованию маршруту, скорость прохождения маршрута.
7. Упрощенная модель алгоритма выработки рассогласования бортов по скорости.
При использовании гусеничного движителя единственным методом поворота платформы является метод различия скоростей движения бортов платформы. Таким образом для разворота в нужную сторону вводится разница скорости вращения силовых установок.
В зависимости от типа задания маршрута могут использоваться два алгоритма:
Движение по кусочно-линейному маршруту.
В данном виде движения разделяют два типа движения:
- по прямой линии от точки к точке;
- поворот на угол в узлах.
Движение по прямой линии обеспечивается алгоритмом коррекции угла (отклонение от прямой) путем ввода рассогласования скорости движения бортов. Значение рассогласования ранжировано в зависимости от ошибки по углу;
- менее 10°. Без изменения значения скорости движения, путем ввода рассогласования бортов. Рассогласование скорости не более 5%, зависимость линейная.
- более 10° менее 30°. Уменьшение скорости движения платформы до 25% от максимальной, ввод рассогласования скорости бортов. Рассогласование скорости не более 10%, зависимость линейная.
При возникновении нештатной ситуации (съезд с прямой линии на расстояние более 5 метров) алгоритм движения останавливается, вводится дополнительная промежуточная точка, расположенная на прямой движения и осуществляется движение до этой точки с продолжением алгоритма от нее.
Поворот на заданный угол в узлах (точках) маршрута осуществляется путем остановки платформы по достижении заданной точки и вращением бортов в противоположном направлении до достижения необходимого угла.
Движение по гладкой траектории (квадратичная аппроксимация).
Данный алгоритм в силу примененного метода аппроксимации позволяет осуществлять плавное движение по траектории без остановок (кроме случаев острых углов) на максимально возможной скорости. Управление осуществляется путем рассогласования бортов платформы в зависимости от рассчитанной в каждой точке траектории кривизны (угол поворота). Снижение скорости движения зависит от кривизны и имеет ступенчатую функцию, т.е. скорость разделена на диапазоны 100, 50, 5% в зависимости от угла кривизны от 0° до 20°, от 20° до 80° и от 80° и больше, соответственно проценту скорости.
При возникновении нештатной ситуации (отклонение от маршрута более 5 метров) алгоритм движения останавливается, вводится дополнительная промежуточная точка, расположенная на маршруте движения и осуществляется движение до этой точки с продолжением алгоритма от нее.
Общим для обоих алгоритмов является снижение скорости движения в зависимости от расстояния между опорными точками маршрута, т.е. при расстоянии между точками менее 20 м происходит линейное уменьшение скорости движения до 5% от максимальной включительно, при этом подразумевается, что расстояние между точками не может быть менее 2 м.
8. Протокол обмена платформы с пунктом управления.
Обмен пункта управления с платформой происходит в полудуплексном режиме со структурой ВЕДУЩИЙ-ВЕДОМЫЙ. Обмен инициирует всегда ВЕДУЩИЙ. Ведущим в обмене является пункт управления.
РТК, являясь объектом потенциально опасным, имеет механизм защиты от потери связи. Вне зависимости от наличия необходимости обмена пункт управления с частотой 1 Гц инициирует обмен пустыми сообщениями с платформой. Со стороны платформы наличие указанного обмена позволяет определять наличие контроля со стороны пункта управления и при возникновении сбоя в обмене прекратить движение или другое опасное действие.
Все сообщения делятся на команды управления, запросы, ответы. Протокол обмена является символьно-ориентированным, т.е все данные передаются в символьном виде, если не оговорено иное. Кодировка символов - ASCII.
В общем виде сообщения, передаваемые со стороны платформы, состоят из заголовка, определяющего начало сообщения, идентификатора платформы (бинарное данное), байта длины тела сообщения (бинарное данное), тела сообщения, контрольной суммы тела сообщения (код CRC16) и признака конца сообщения.
Тело сообщения может отсутствовать, т.е. иметь нулевую длину (сообщения для пингования платформы). Контрольная сумма для нулевого сообщения равна 0×0000.
|
После получения сообщения платформа отвечает квитанцией, содержащей строку «ОК» в качестве тела сообщения, при условии, что команда принята или строкой «ERROR_N», сообщающей об ошибке принятия сообщения либо о невозможности обработать данное сообщение. Тип ошибки определяется параметром N. Также ошибкой связи является перерыв в передаче (таймаут) между символами, превышающий время передачи одного символа, или таймаут между сообщением и ответом, превышающий время передачи трех символов.
Перечень команд:
- установить номер радиоканала для камеры N;
«SC»+«NMM_NMM_NMM»,
где NMM - номер камеры (символ N) и номер канала (символ MM). Перечисляются через разделитель «_». Количество блоков NMM любое. Блок NMM в любом месте сообщения и равный «000» отключает все камеры;
- установить тип кодирования сигнала для видеокамеркамер с исходным значением кода кодирования
«SS»+«T_CC»,
где T - номер типа кодирования от 0 до 9, при значении 0 - кодирование отсутствует, параметр CC при этом игнорируется. CC номер кода для данного типа кодирования, от 00 до 99;
- режим автономного ориентирования для БИНС 3
«RG_NNNN.N»,
если параметр NNNN.N отсутствует, тогда запускается режим автономного ориентирования БИНС 3, если параметр задан, тогда происходит выставка БИНС 3 на заданный угол. Контроль завершения режима гирокомпасирования или выставки на заданный угол производится путем запроса состояния платформы;
- задание режима навигации
«SN_N»,
где N 0 - комплексирование, 1 - одометрия, 2 - спутниковая навигация. Установленный режим после выключения питания сбрасывается в режим 0;
- задание коэффициентов навигации, ориентирования - «строка коэффициентов»
- включить/выключить станцию питания
«PW_OFF» или «PW_ON»;
- команда на начало движения (скорость левый борт, скорость правый борт) «режим ручного управления»
«MO_VV_WW»;
- экстренный останов платформы «AA»;
- ввод маршрутного задания
«SW_T_N_PXxxxxxxx, xYyyyyyyyy, y_PXxxxxxxx, xYyyyyyyyy, y_PXxxxxxxx, xYyyyyyyyy, y_PXxxxxxxx, xYyyyyyyyy, y_PXxxxxxxx, xYyyyyyyyy,y»,
где T - тип аппроксимации маршрута (0 - кусочно-линейная, 1 - квадратичная);
N - количество точек маршрута (не может быть нулевым и превышать значение 255);
P - идентификатор точки;
X - идентификатор координаты Х
Y - идентификатор координаты Y
xxxxxxxx,x - значение координаты X
yyyyyyyy,y - значение координаты Y;
- начать/закончить маршрутное задание номер N
«RUN_N» или «STOP_N»;
- возврат в исходную точку
«RETURN».
9. Интерфейс оператора платформы.
Основная цель интерфейса 5 оператора платформы - это максимум информативности, минимум управления. Т.е. интерфейс оператора платформы должен содержать интуитивно понятную для восприятия информацию о состоянии платформы и показания ее датчиков (например, изображение видеокамер). При этом от оператора необходимо требовать минимальное количество действий по настройке и управлению платформой, тем самым сконцентрировав все внимание оператора на информации, получаемой от платформы.
Основные рабочие области экрана ЭВМ, предоставляющего интерфейс 5 оператора платформы:
- область оперативного уведомления (ООУ) 6 (строка, раскрывающаяся в список, содержащий сообщения оператору о состоянии платформы и требующие внимания или немедленной реакции оператора). Располагается в верхней части экрана, по всей его ширине;
- видеоданные от видеокамер (ВДВ) 7. На видеоизображениях накладывается измерительная марка с возможностью ее перемещения для грубой оценки расстояния до наблюдаемого объекта;
- область отображения (ОО) 8 ЭКМ. Отображается местоположение платформы в зависимости от текущих координат и направления движения. Отображается азимут/дирекционный угол платформы и координаты платформы в графическом и цифровом виде. Позволяет наносить маркеры на карту с их описанием, маршрут движения до указанной точки в виде полилинии и сохранять стоп кадры (фото) камер с привязкой их к карте (координаты) и направлению (азимут) с дальнейшей возможностью их просмотра. Позволяет управлять масштабом отображения;
- область физического состояния (ОФС) 9 платформы в виде пиктограммы двух проекций платформы (вид сверху и сбоку), отображающая углы продольного и поперечного наклона платформы, количество заряда батареи, количество топлива в баке, скорость движения и оценочный запас хода;
- область отображения детальных данных (ООДД) 10 - токи, напряжения, температуры и т.д.
- область управления подсистемами и приборами (ОУПП) 11 (включение/выключение и т.д.) и настройками (номер канала связи, скорость обмена и т.д.).
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании способа информационного обеспечения робототехнического комплекса, обеспечивающего в рамках протоколов информационного обмена автономное ориентирование (определение дирекционного угла), определение собственных координат местоположения по сигналам спутниковой навигации, в режиме одометрической навигации и комплексированном режиме, определение углового положения в пространстве, передачу данных по цифровому радиоканалу о состоянии комплекса (координаты, углы), прием по цифровому радиоканалу команд управления от командного пункта, передачу по радиоканалу маскированного телевизионного сигнала от трех камер.
Способ информационного обеспечения робототехнического комплекса, включающий в себя блок ЭВМ и периферийные устройства, установленные на объекте управления и взаимодействующие между собой по каналу связи посредством взаимообмена сигналами управления и состояния в соответствии с протоколом обмена согласно программному обеспечению, отличающийся тем, что программное обеспечение робототехнического комплекса состоит из встроенного программного обеспечение платформы робототехнического комплекса, обеспечивающего решение задач управления и навигации в реальном масштабе времени, программного обеспечения пункта управления, целевыми платформами для которого являются Windows и МСВС (мобильная система вооруженных сил), программное обеспечение платформы функционирует в двух уровнях - уровень обеспечения сопряжения с аппаратными средствами (драйверы) и прикладной уровень, построенный в виде иерархии скриптов отдельных подзадач, программное обеспечение платформы реализует алгоритмы следующих режимов состояния платформы: выключена/включена, и ожидает команды (ожидание), работа от аккумуляторной батареи, работа от станции питания через аккумуляторную батарею, выполнение команд управления, по запросу пункта управления с платформы передается телеметрическая информация в соответствии с ранее установленной маской, обеспечивающей сокращение объема передаваемой информации, или телеметрическая информация в полном объеме: геодезические координаты местоположения, углы Эйлера положения платформы в градусах, минутах, секундах, состояние видеокамер, частота канала, тип кодирования, состояние аккумуляторных батарей, состояние станции питания, состояние приводов, сведения о внешней обстановке, с пункта управления подаются команды управления на видеокамеры, систему топопривязки и ориентирования, станцию питания, на устройства обеспечения движения платформы, алгоритм управления движением реализует формирование сигналов акселератора на правый и левый борт, сигналов торможения двигателей, программного сигнала завершения движения, отработку направления движения левого и правого борта, управление редукторами бортов, в рамках алгоритма управления движением сформирован алгоритм рассогласования бортов по скорости, обеспечивающий поворот платформы за счет различия скоростей движения бортов платформы, при движении платформы по заданному маршруту используются два алгоритма: движение по кусочно-линейному маршруту - по прямой линии от точки к точке с поворотом на угол в узлах, движение по гладкой траектории (квадратичная аппроксимация), позволяющий выполнять плавное движение по траектории, протокол обмена платформы с пунктом управления подразумевает информационный обмен в полудуплексном режиме со структурой ведущий-ведомый, в программном обеспечении предусмотрен механизм защиты от потери связи, интерфейс оператора платформы выполнен по принципу получения максимальной информативности, минимального управления и содержит основные рабочие области экрана ЭВМ: область оперативного уведомления, видеоданные от видеокамер, область отображения электронной карты местности, область физического состояния платформы, область отображения детальных данных, область управления подсистемами и приборами.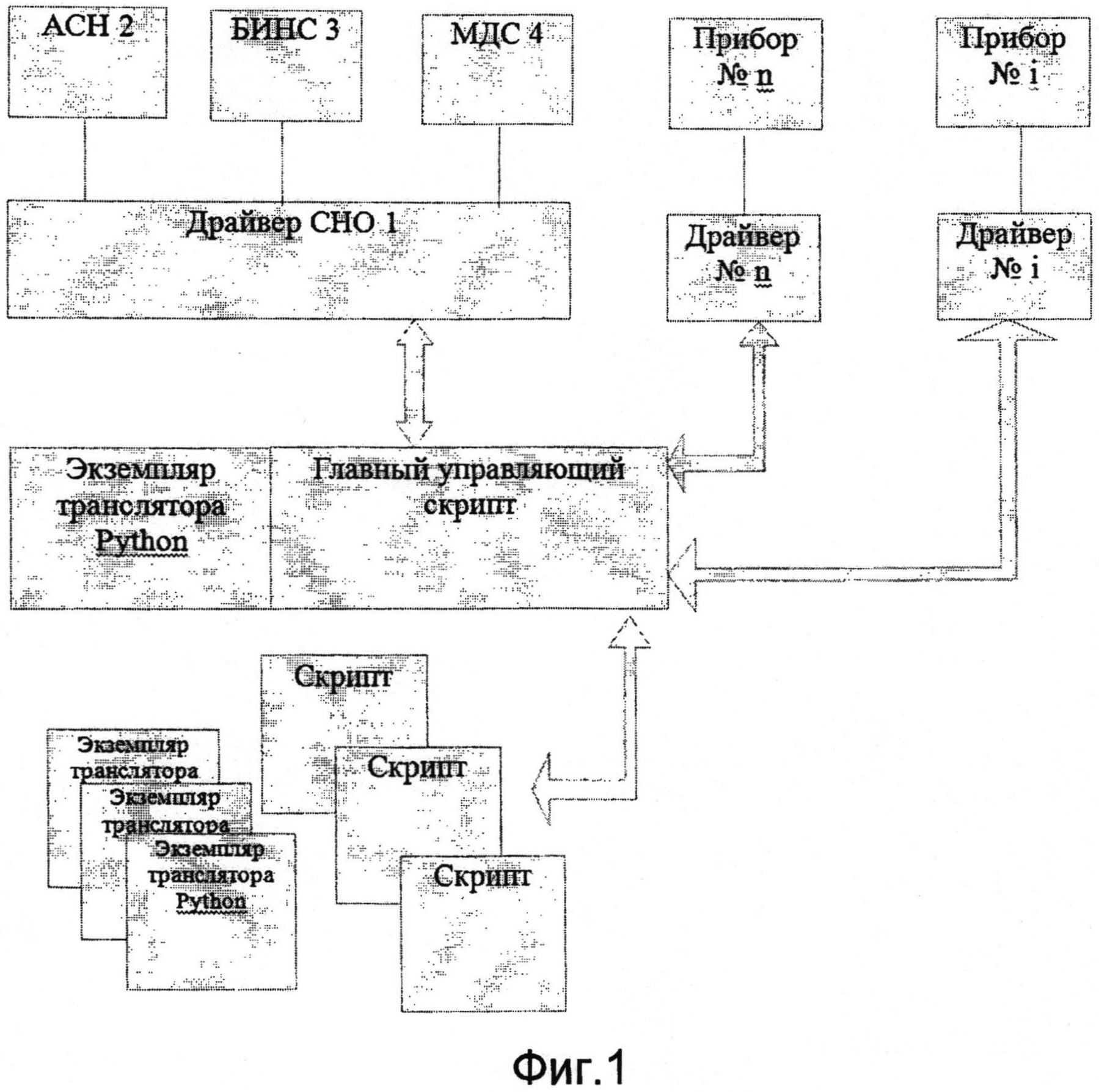
Способ функционирования боевого дистанционно управляемого модуля в различных режимах применения
Стенд для проверки коэффициента зеркального отражения
Модульная установка предъявления появляющейся цели
Роботизированный модульный комплекс автономного полигонного оборудования
Пулемет
Модуль управления полигонным оборудованием
Способ проверки зенитных ракет и пусковых установок
Механическое прицельное приспособление
Универсальный способ обмена навигационно-временной информацией в образцах военной техники сухопутных войск
Способ изготовления ствола
Роботизированный модульный комплекс автономного полигонного оборудования
Пулемет
Модуль управления полигонным оборудованием
Способ проверки зенитных ракет и пусковых установок
Механическое прицельное приспособление
Универсальный способ обмена навигационно-временной информацией в образцах военной техники сухопутных войск
Приемник имитатора боевых средств переносного зенитного ракетного комплекса
Бесступенчатая импульсная передача
Автоматическое стрелковое оружие с ленточной и магазинной подачей патронов
Датчик контроля горизонта

