СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ, СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И ЛЕТАТЕЛЬНЫЙ АППАРАТ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к системе управления летательным аппаратом, к способу управления летательным аппаратом и к летательному аппарату, в частности к системе управления летательным аппаратом, к способу управления летательным аппаратом и к летательному аппарату, которые обеспечивают устойчивость полета даже в случае, если некоторые или все управляющие поверхности находятся в неисправном состоянии, например в неработоспособном или поврежденном состоянии.
Уровень техники
Обычно пространственным положением летательного аппарата управляют с помощью приводов, которые обеспечивают требуемое перемещение управляющих поверхностей летательного аппарата, таких как рули высоты, элероны и руль направления, в соответствии с заданными управляющими сигналами. В частности, в системах управления летательных аппаратов бортовой компьютер (вычислитель) управления полетом, установленный на летательном аппарате, вычисляет сигнал управления углом отклонения управляющей поверхности, предназначенный для управления положением управляющих поверхностей, на основании информации, полученной от различных предусмотренных на летательном аппарате датчиков, таких как инерциальный датчик и датчик воздушных сигналов, и на основании задающего управляющее воздействие командного сигнала с органа управления летательным аппаратом, такого как штурвал управления. Тогда в соответствии с сигналом управления углом отклонения управляющей поверхности, вычисляемым бортовым компьютером управления полетом, привод перемещает управляющие поверхности, таким образом удерживая летательный аппарат в требуемом пространственном положении и обеспечивая устойчивость полета.
Однако в случае произошедшей в полете поломки, повреждения или иного отказа, приводящего к неисправности некоторых или всех управляющих поверхностей, изменение или сохранение пространственного положения летательного аппарата с помощью управляющих поверхностей является затруднительным. Для компенсации возникшей проблемы пилот создает управляющее воздействие на органе управления одним из двигателей (в частности, на рычаге управления двигателем) таким образом, чтобы сохранить требуемое пространственное положение и попытаться продолжить полет или совершить посадку.
Что касается управления летательным аппаратом в случае повреждения управляющих поверхностей, из уровня техники, например из выложенной до проведения экспертизы японской заявки на изобретение с номером публикации Hei 8-183497 [1], известен способ управления, предусматривающий применение средства изменения вектора тяги, которое за счет отклонения истекающей из сопла реактивной струи создает момент рыскания, причем система управления летательным аппаратом переключается с управления посредством руля направления на управление с помощью средства изменения вектора тяги, если установлено, что руль направления работает ненормально.
Раскрытие изобретения
Техническая задача
Вместе с тем описанное выше управление летательным аппаратом за счет создания пилотом воздействий на орган управления двигателем проблематично в том смысле, что продолжение устойчивого полета или совершение безопасной посадки является затруднительным. Технология, раскрытая в патентном источнике [1], проблематична в том смысле, что она влечет за собой увеличение числа компонентов летательного аппарата, увеличение веса и увеличение числа нуждающихся в обслуживании элементов, поскольку она предполагает оснащение двигателей отдельными средствами изменения вектора тяги.
Настоящее изобретение было создано для решения описанных выше проблем, и его целью является разработка системы управления летательным аппаратом, делающей возможным устойчивый полет без необходимости выполнения пилотом сложных манипуляций органом(-ами) управления двигателем(-ями) даже в случае, если некоторые или все управляющие поверхности неисправны.
Решение задачи
Решение поставленной задачи достигается в настоящем изобретении следующим образом.
Объектом настоящего изобретения является система управления летательным аппаратом, содержащая: вычислительное средство, вычисляющее сигнал управления тягой, предназначенный для управления тягой двигателя, и сигнал управления углом отклонения управляющей поверхности, предназначенный для управления положением управляющих поверхностей, на основании информации о состоянии, указывающей на состояние планера летательного аппарата, и на основании задающего управляющее воздействие командного сигнала с органа управления летательным аппаратом; средство управления двигателем, управляющее работой двигателя на основании сигнала управления тягой; и средство перемещения управляющей поверхности, осуществляющее перемещение управляющих поверхностей на основании сигнала управления углом отклонения управляющей поверхности.
В соответствии с настоящим изобретением вычислительное средство получает различные виды информации о состоянии (параметры состояния), касающиеся состояния планера летательного аппарата, такие как угловая скорость, угол пространственного положения, ускорение, угол атаки, угол бокового скольжения, барометрическая высота и воздушная скорость планера летательного аппарата, от датчиков, таких как инерциальный датчик, датчик воздушных сигналов и иных подобных средств измерения, предусмотренных на планере летательного аппарата, а также получает задающий управляющее воздействие командный сигнал, генерируемый при воздействии пилота на орган управления летательным аппаратом, такой как штурвал управления. Тогда для управления планером летательного аппарата с целью сохранения им требуемого пространственного положения вычислительное средство вычисляет сигнал управления тягой, предназначенный для управления тягой двигателя, и сигнал управления углом отклонения управляющей поверхности, предназначенный для управления положением управляющих поверхностей, на основании информации о состоянии и вышеупомянутого командного сигнала. Кроме того, средство управления двигателем управляет работой двигателя на основании сигнала управления тягой, а средство перемещения управляющей поверхности перемещает управляющие поверхности на основании сигнала управления углом отклонения управляющей поверхности. Таким образом, в дополнение к управлению углом отклонения управляющей поверхности, осуществляемому путем перемещения управляющих поверхностей, предусмотрено управление тягой двигателя, осуществляемое путем управления работой двигателя на основании сигнала управления тягой. Так, даже в случае, если некоторые или все управляющие поверхности оказались неработоспособными или поврежденными и перестали нормально работать, т.е. когда управление пространственным положением планера с помощью управляющих поверхностей является затруднительным, управляя тягой двигателя, можно изменять пространственное положение планера летательного аппарата на требуемое или сохранять требуемое пространственное положение, что позволяет продолжать устойчивый полет без необходимости выполнения пилотом сложных манипуляций органом(-ами) управления двигателем(-ями).
С учетом этого предлагаемая в изобретении система управления летательным аппаратом в первом варианте содержит средство обнаружения отказа/повреждения управляющей поверхности, способное обнаруживать неисправность по меньшей мере одной из управляющих поверхностей, причем вычислительное средство вычисляет сигнал управления тягой и сигнал управления углом отклонения управляющей поверхности при обнаружении неисправности по меньшей мере одной из управляющих поверхностей.
В соответствии с изобретением в случае неисправности управляющих поверхностей управление пространственным положением планера осуществляется посредством тяги двигателя, что позволяет всегда продолжить устойчивый полет. Обычно, когда управление пространственным положением планера летательного аппарата осуществляется посредством тяги двигателя, быстрота реакции планера на изменение тяги меньше, чем в случае управления пространственным положением планера посредством управляющих поверхностей. Более того, если все управляющие поверхности работают нормально, управление тягой двигателя для поддержания пространственного положения планера летательного аппарата не требуется. По этой причине управление пространственным положением планера летательного аппарата посредством тяги двигателя осуществляется только тогда, когда некоторые или все управляющие поверхности неисправны, что обеспечивает более точное управление полетом и всегда позволяет продолжить устойчивый полет.
Система управления летательным аппаратом также может содержать средство сигнализации, способное обнаруживать неисправность по меньшей мере одной из управляющих поверхностей и информировать об этом пилота. Поскольку в этом случае пилот информируется о том, что по меньшей мере одна из управляющих поверхностей является неисправной, можно ожидать, что пилот примет соответствующие меры, что обеспечит более точное управление пространственным положением планера летательного аппарата и продолжение устойчивого полета.
Во втором варианте предлагаемая в изобретении система управления летательным аппаратом содержит, помимо охарактеризованных выше вычислительного средства, средства управления двигателем и средства перемещения управляющей поверхности, фильтр регулирования быстродействия, который регулирует быстроту реакции двигателя и быстроту реакции управляющих поверхностей. В этом варианте осуществления изобретения быстрота реакции (отклика) планера летательного аппарата при управлении его пространственным положением посредством тяги двигателя и быстрота реакции планера при управлении его пространственным положением посредством управляющих поверхностей может регулироваться (корректироваться) фильтром регулирования быстродействия, и это может способствовать продолжению устойчивого полета. Обычно планер летательного аппарата при управлении его пространственным положением посредством тяги двигателя реагирует на управляющее воздействие медленнее, чем при управлении его пространственным положением посредством угла отклонения управляющих поверхностей. Более того, быстрота реакции зависит от того, какие из управляющих поверхностей работают неправильно. По этой причине сигнал управления углом отклонения управляющей поверхности фильтруется фильтром регулирования быстродействия для того, чтобы сделать быстроту реакции управляющих поверхностей почти равной быстроте реакции двигателя. Таким образом можно преодолеть различие в скоростях реакции, и это способствует продолжению устойчивого полета.
Объектом настоящего изобретения является также летательный аппарат, содержащий описанные выше варианты системы управления летательным аппаратом.
Поскольку в соответствии с настоящим изобретением летательный аппарат содержит описанную выше систему управления, пространственное положение планера летательного аппарата можно изменять на требуемое или можно сохранять требуемое пространственное положение за счет управления тягой двигателя при управлении работой двигателя на основании сигнала управления тягой, в дополнение к управлению углом отклонения управляющей поверхности, осуществляемому путем перемещения управляющих поверхностей, что позволяет продолжать устойчивый полет без необходимости выполнения пилотом сложных манипуляций органом(-ами) управления двигателем(-ями).
Объектом настоящего изобретения является также способ управления летательным аппаратом, включающий: вычисление сигнала управления тягой, предназначенного для управления тягой двигателя, и сигнала управления углом отклонения управляющей поверхности, предназначенного для управления положением управляющих поверхностей, на основании информации о состоянии, указывающей на состояние планера летательного аппарата, и на основании задающего управляющее воздействие командного сигнала с органа управления летательным аппаратом; управление работой двигателя на основании сигнала управления тягой; перемещение управляющих поверхностей на основании сигнала управления углом отклонения управляющей поверхности; и обнаружение неисправности по меньшей мере одной из управляющих поверхностей, причем при обнаружении неисправности по меньшей мере одной из управляющих поверхностей вычисляют сигнал управления тягой и сигнал управления углом отклонения управляющей поверхности.
Технические результаты, достигаемые при осуществлении изобретения, заключаются в повышении уровня отказобезопасности летательного аппарата и
упрощении управления летательными аппаратом в нештатной ситуации. Как описано выше, в соответствии с изобретением устойчивость полета достигается без необходимости выполнения пилотом сложных манипуляций органом(-ами) управления двигателем(-ями) даже в случае, если некоторые или все управляющие поверхности неисправны.
Краткое описание чертежей
На чертеже приведена блок-схема, схематически представляющая структуру системы управления летательным аппаратом в одном варианте осуществления настоящего изобретения, в котором система управления смонтирована на летательном аппарате.
Осуществление изобретения
Ниже рассматривается вариант выполнения предлагаемой в изобретении системы управления летательным аппаратом, поясняемый прилагаемым чертежом.
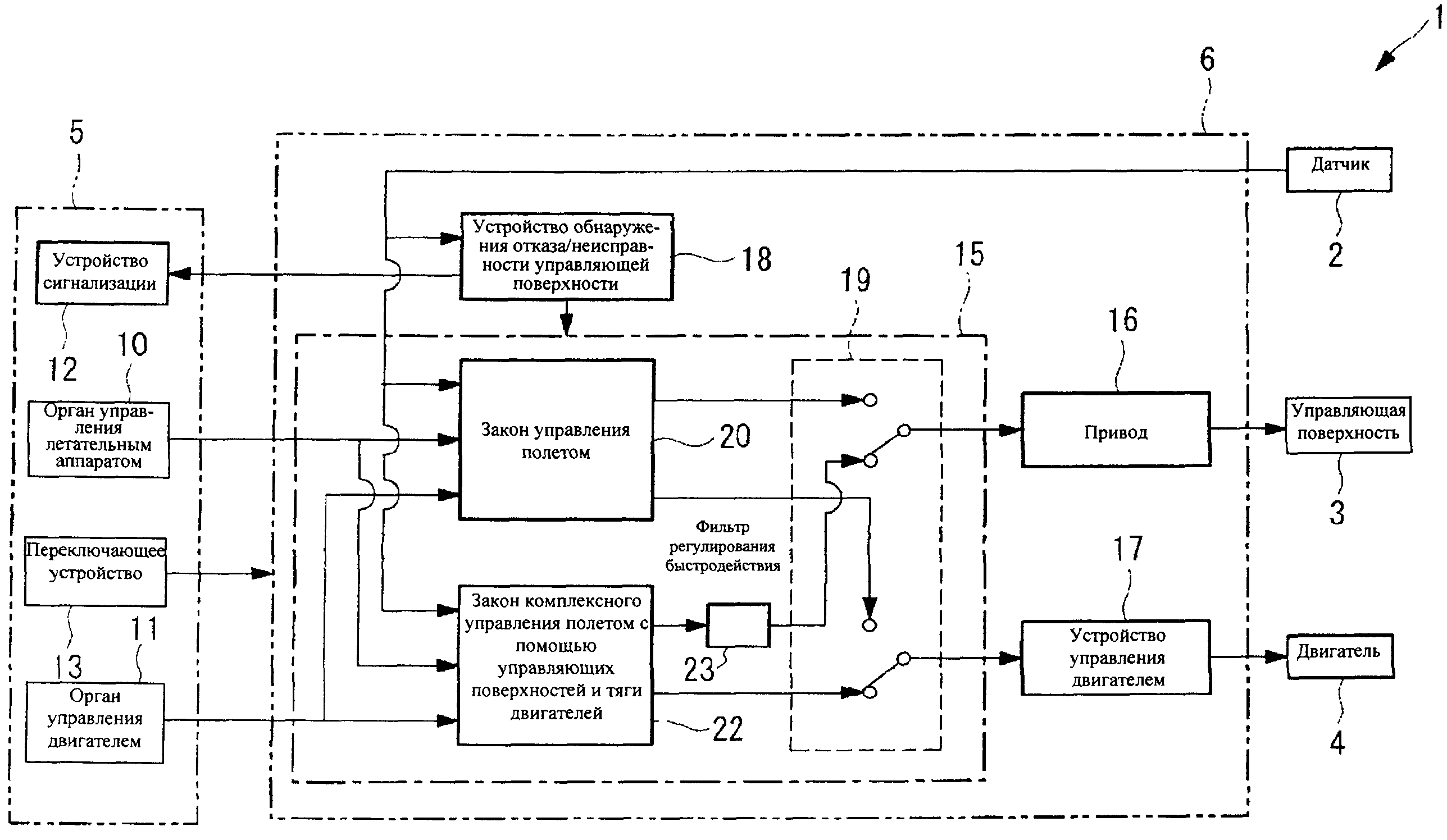
На чертеже приведена блок-схема, схематически представляющая конфигурацию летательного аппарата 1, на котором смонтирована система управления летательным аппаратом в рассматриваемом варианте ее выполнения. Летательный аппарат 1 имеет датчик 2, управляющие поверхности 3, двигатель 4, кабину 5 экипажа и систему 6 управления.
Под датчиком 2 понимаются различные датчики, такие как инерциальный датчик и датчик воздушных сигналов, воспринимающие различные виды информации о состоянии, касающейся состояния планера, такие как угловая скорость, угол пространственного положения, ускорение, угол атаки, угол бокового скольжения, барометрическая высота и воздушная скорость планера, и выдающие полученную информацию о состоянии в систему 6 управления.
Управляющие поверхности 3 включают в себя руль высоты, обеспечивающий управление по тангажу, т.е. подъем или опускание носа летательного аппарата, руль направления, обеспечивающий управление по рысканию, т.е. поворот носа летательного аппарата влево или вправо, элерон, обеспечивающий поперечное управление, т.е. крен планера летательного аппарата влево или вправо, и взлетно-посадочную механизацию крыла (закрылок, предкрылок), изменяющую профиль основного крыла таким образом, чтобы увеличить подъемную силу. Управляющие поверхности 3 перемещаются приводами, описываемыми ниже, и таким образом посредством аэродинамических сил происходит управление пространственным положением планера летательного аппарата.
Работой двигателя 4, который может быть реактивным двигателем, управляет описываемое ниже устройство управления двигателем, при этом двигателем создается тяга как реакция на истечение с высокой скоростью газов, образующихся в результате сжигания топлива при его взаимодействии с всасываемым в двигатель воздухом.
В кабине 5 экипажа расположены приборы (на чертеже не показаны), отображающие условия полета летательного аппарата 1, а также показанное на чертеже оборудование различных видов, дающее пилоту возможность управлять летательным аппаратом 1, такое как орган 10 управления летательным аппаратом, орган 11 управления двигателем, устройство 12 сигнализации и переключающее устройство 13. Для перемещения (отклонения) управляющих поверхностей 3 пилот воздействует на орган 10 управления летательным аппаратом, и в систему 6 управления выдается генерируемый при воздействии пилота на орган 10 управления летательным аппаратом командный сигнал, задающий управляющее воздействие в отношении положения управляющих поверхностей. Для управления тягой двигателя пилот воздействует на орган 11 управления двигателем, и в систему 6 управления выдается генерируемый при воздействии пилота на орган 11 управления двигателем командный сигнал, задающий управляющее воздействие в отношении тяги двигателя. Устройство 12 сигнализации издает предупреждающий звук или осуществляет визуальную индикацию на дисплее (на чертеже не показан), предусмотренном в кабине 5 экипажа, для выдачи пилоту заранее заданного предупреждения на основании информации из системы 6 управления. В рассматриваемом варианте осуществления изобретения, в частности в случае неисправности управляющих поверхностей 3, например при повреждении управляющей поверхности, устройство 12 сигнализации информирует пилота об этом. Переключающее устройство 13 выдает командный сигнал переключения для переключения между законом 20 управления полетом и законом 22 комплексного управления полетом с помощью управляющих поверхностей и тяги двигателей (более подробно описываемым ниже), реализованными в системе 6 управления, и этот командный сигнал переключения выдается в систему 6 управления на основании действия, выполненного пилотом.
Система 6 управления содержит компьютер (вычислитель) 15 для вычисления заданного сигнала управления, привод 16, перемещающий управляющие поверхности 3 на основании сигнала управления, выдаваемого компьютером 15, устройство 17 управления двигателем, управляющее работой двигателя 4 аналогичным образом - на основании сигнала управления, выдаваемого компьютером 15, и устройство 18 обнаружения отказа/неисправности управляющей поверхности, способное обнаруживать отказ/неисправность управляющих поверхностей.
Компьютер 15 вычисляет сигнал управления углом отклонения управляющей поверхности и сигнал управления тягой и содержит закон 20 управления полетом, закон 22 комплексного управления полетом с помощью управляющих поверхностей и тяги двигателей и переключатель 19 для переключения между этими двумя законами.
Закон 20 управления полетом обеспечивает возможность управления полетом летательного аппарата 1 в автоматическом режиме или пилотирования в ручном режиме по командам пилота в состоянии летательного аппарата 1, в котором он совершает нормальный полет, а его оборудование, такое как управляющие поверхности 3, работает нормально.
В состоянии, в котором управление летательным аппаратом 1 осуществляется согласно закону 20 управления полетом, для управления, в частности, пространственным положением летательного аппарата 1 компьютер 15 генерирует сигнал управления углом отклонения управляющей поверхности на основании задающего управляющее воздействие командного сигнала, генерируемого посредством воздействия пилота на орган 10 управления летательным аппаратом, и на основании информации о состоянии, получаемой от датчика 2. Каждый сгенерированный сигнал управления углом отклонения управляющей поверхности выдается на привод 16, и в соответствии с сигналом управления углом отклонения управляющей поверхности привод 16 перемещает управляющие поверхности 3 для управления углом их отклонения, тем самым обеспечивая изменение или сохранение пространственного положения летательного аппарата 1.
Закон 22 комплексного управления полетом с помощью управляющих поверхностей и тяги двигателей обеспечивает возможность управления полетом летательного аппарата 1 в автоматическом режиме или пилотирования в ручном режиме по командам пилота, когда любая из управляющих поверхностей 3 летательного аппарата 1 является неисправной. В состоянии, в котором управление летательным аппаратом 1 осуществляется согласно закону 22 комплексного управления полетом с помощью управляющих поверхностей и тяги двигателей, для управления пространственным положением летательного аппарата 1, компьютер 15 генерирует сигнал управления углом отклонения управляющей поверхности и сигнал управления тягой на основании задающего управляющее воздействие командного сигнала, генерируемого посредством воздействия пилота на орган 10 управления летательным аппаратом, и на основании информации о состоянии, получаемой от датчика 2. Поскольку согласно закону 22 комплексного управления полетом с помощью управляющих поверхностей и тяги двигателей сигнал управления тягой вычисляется на основании задающего управляющее воздействие командного сигнала и информации о состоянии, то даже при воздействии на орган 11 управления двигателем компьютер 15 ограничивает результат этого воздействия и автоматически присваивает высокий приоритет вычислению сигнала управления тягой на основании задающего управляющее воздействие командного сигнала и информации о состоянии.
Сгенерированный сигнал управления углом отклонения управляющей поверхности выдается на привод 16, и привод 16 в соответствии с сигналом управления углом отклонения управляющей поверхности перемещает управляющие поверхности 3. Сгенерированный сигнал управления тягой выдается в устройство 17 управления двигателем, и устройство 17 управления двигателем управляет работой двигателя 4 в соответствии с сигналом управления тягой. В результате перемещения управляющих поверхностей 3 в соответствии с сигналом управления углом отклонения управляющей поверхности и в результате управления работой двигателя 4 в соответствии с сигналом управления тягой осуществляется управление углом отклонения управляющей поверхности управляющих поверхностей и тягой двигателей и пространственное положение летательного аппарата 1 изменяется или сохраняется соответственно.
Следует отметить, что на пути прохождения сигнала управления углом отклонения управляющей поверхности, генерируемого согласно закону 22 комплексного управления полетом с помощью управляющих поверхностей и тяги двигателей и выдаваемого на привод 16, предусмотрен фильтр 23 регулирования быстродействия для регулирования (коррекции) различия в быстроте реакции между двигателем 4 и управляющими поверхностями 3. Фильтр 23 регулирования быстродействия может выполнять регулирование быстроты реакции путем, например, фильтрации сигнала управления углом отклонения управляющей поверхности.
Обычно время реакции, проходящее от момента выдачи сигнала управления тягой с целью управления тягой двигателя до момента достижения двигателем 4 требуемой тяги на основании этого сигнала управления тягой, превышает время реакции, проходящее от момента выдачи сигнала управления углом отклонения управляющей поверхности, и выдается с целью управления углом отклонения управляющей поверхности до момента достижения управляющими поверхностями 3 требуемого угла отклонения на основании этого сигнала управления углом отклонения управляющей поверхности. Более того, быстрота реакции планера колеблется в зависимости от того, какая часть управляющих поверхностей 3 работает неправильно. По этой причине предусмотрен фильтр 23, предназначенный для регулирования быстродействия так, чтобы быстрота реакции управляющих поверхностей 3 была почти равна быстроте реакции двигателя 4, тем самым обеспечивая единообразие реакции планера вне зависимости от того, которая из управляющих поверхностей 3 является неисправной.
Устройство 18 обнаружения отказа/неисправности управляющей поверхности на основании получаемой от датчика 2 информации о состоянии летательного аппарата 1 определяет, работают ли управляющие поверхности 3 нормально, обнаруживает неисправность, если любая из управляющих поверхностей или все управляющие поверхности 3 неработоспособны или повреждены, и выдает сигнал неисправности, указывающий на это, в устройство 12 сигнализации и компьютер 15. Кроме того, устройство 18 обнаружения отказа/неисправности управляющей поверхности выдает в компьютер 15 сигнал переключения, когда в состоянии, в котором обнаружена неисправность управляющей поверхности 3, необходимо автоматически переключиться с закона 20 управления полетом на закон 22 комплексного управления полетом с помощью управляющих поверхностей и тяги двигателей.
Переключатель 19 приспособлен для переключения компьютера между законом 20 управления полетом и законом 22 комплексного управления полетом с помощью управляющих поверхностей и тяги двигателей, подлежащих реализации в соответствующей ситуации, в ответ либо на командный сигнал переключения, поступивший с переключающего устройства 13 в результате ввода соответствующей команды пилотом, либо на сигнал переключения от устройства 18 обнаружения отказа/неисправности управляющей поверхности, в зависимости от состояния летательного аппарата 1.
Ниже рассматривается работа выполненной таким образом системы управления летательным аппаратом.
В отсутствие отклонений от нормальной работы оборудования, такого как управляющие поверхности 3, описанного выше летательного аппарата 1, управлением полетом летательного аппарата 1 осуществляется согласно закону 20 управления полетом. Если во время полета устройство 18 обнаружения отказа/неисправности управляющей поверхности обнаружит, что по меньшей мере одна из управляющих поверхностей 3 по какой-либо причине, такой как повреждение, работает неправильно, устройство 18 обнаружения отказа/неисправности управляющей поверхности выдает указывающий на это сигнал неисправности в устройство 12 сигнализации и выдает сигнал переключения в компьютер 15. После того как в результате выдачи сигнала неисправности в устройство 12 сигнализации пилот летательного аппарата 1 узнает о неисправности управляющих поверхностей 3, он приведет в действие переключающее устройство 13 для переключения на закон 22 комплексного управления полетом с помощью управляющих поверхностей и тяги двигателей и переключающее устройство 13 выдаст командный сигнал переключения. На основании командного сигнала переключения компьютер 15 приводит в действие переключатель 19 для смены закона управления полетом, чтобы управление летательным аппаратом 1 осуществлялось теперь согласно закону 22 комплексного управления полетом с помощью управляющих поверхностей и тяги двигателей, как показано на чертеже.
Если в состоянии, в котором управление летательным аппаратом 1 осуществляется согласно закону 22 комплексного управления полетом с помощью управляющих поверхностей и тяги двигателей, в компьютер 15 с органа 10 управления летательным аппаратом выдается командный сигнал, компьютер 15 на основании командного сигнала и информации о состоянии от датчика 2 определяет, которая из управляющих поверхностей 3 является неисправной, и вычисляет сигнал управления углом отклонения управляющей поверхности и сигнал управления тягой таким образом, чтобы изменить пространственное положение планера летательного аппарата на требуемое или сохранять требуемое пространственное положение, скомпенсировав неисправность управляющей поверхности 3. В этом случае привод 16 перемещает управляющие поверхности 3 на основании вычисленного сигнала управления углом отклонения управляющей поверхности, а устройство 17 управления двигателем управляет работой двигателя на основании сигнала управления тягой. В результате планер летательного аппарата изменяет свое пространственное положение на требуемое или сохраняет требуемое пространственное положение.
Например, если все управляющие поверхности 3 работают нормально, а планер летательного аппарата требуется накренить влево, элерон на левом полукрыле отклоняется задней кромкой вверх для уменьшения подъемной силы на левом полукрыле, а элерон на правом полукрыле отклоняется задней кромкой вниз для увеличения подъемной силы на правом полукрыле, таким образом создавая разность величин подъемной силы с левой и правой сторон планера. Если же элерон на правом полукрыле неисправен, достаточную разность величин подъемной силы, описанную выше, создать невозможно, и поэтому планер летательного аппарата невозможно накренить влево с требуемой скоростью.
Для решения этой проблемы компьютер 15, действуя согласно закону 22 комплексного управления полетом с помощью управляющих поверхностей и тяги двигателей, генерирует сигнал управления углом отклонения управляющей поверхности, вызывающий отклонение элерона на левом полукрыле задней кромкой вверх, и вычисляет сигнал управления тягой, вызывающий уменьшение тяги левого двигателя и одновременное увеличение тяги правого двигателя. В результате перемещения управляющих поверхностей 3 и изменения тяги двигателей 4 в соответствии с этими управляющими сигналами подъемная сила на левом полукрыле уменьшается и создается момент рыскания влево с возникновением угла бокового скольжения, вследствие чего благодаря взаимосвязи бокового и поперечного движений создается момент крена, и таким образом планер летательного аппарата может накрениться влево с требуемой скоростью.
В качестве еще одного примера, если все управляющие поверхности 3 работают нормально и требуется опустить нос, это просто делается путем соответствующего перемещения рулей высоты, но если рули высоты неисправны, компьютер 15 генерирует сигнал управления тягой, вызывающий уменьшение тяги двигателя левого и правого двигателей одновременно. Это позволяет посредством двигателей осуществлять управление по тангажу и таким образом позволяет опустить нос.
Поскольку, как описано выше, управление тягой двигателя также осуществляется в дополнение к управлению углом отклонения управляющей поверхности, выполняемому путем перемещения управляющих поверхностей 3, то даже в случае, если некоторые или все управляющие поверхности 3 неисправны и неспособны нормально работать, т.е. когда управление пространственным положением планера с помощью управляющих поверхностей затруднительно, эту проблему компенсируют путем вычисления сигнала управления тягой для автоматического управления тягой двигателя. Так, даже в случае, если некоторые или все управляющие поверхности 3 неисправны и перестали нормально работать, изобретение позволяет изменять пространственное положение планера летательного аппарата на требуемое или сохранять требуемое пространственное положение без необходимости выполнения пилотом сложных манипуляций органом(-ами) управления двигателем(-ями) и таким образом обеспечивает возможность продолжения устойчивого полета.
Следует заметить, что хотя переключение между законом 20 управления полетом и законом 22 комплексного управления полетом с помощью управляющих поверхностей и тяги двигателей может выполняться в компьютере 15 посредством переключателя 19 на программном уровне, компьютер также может содержать отдельные и независимые вычислительные устройства, вычисляющие, соответственно, сигналы управления углом отклонения управляющей поверхности и сигналы управления тягой и осуществляющие переключение между законом 20 управления полетом и законом 22 комплексного управления полетом с помощью управляющих поверхностей и тяги двигателей посредством переключателя 19 на аппаратном уровне.
Устройство для оценки аэродинамического коэффициента и устройство для обнаружения отказа/повреждения управляющей поверхности
Устройство для оценки аэродинамического коэффициента и устройство для обнаружения отказа/повреждения управляющей поверхности

